基于安全A*算法的AGV路徑規劃
2021-01-29 08:28:36黃令葦全燕鳴王榮輝
自動化與儀表 2021年1期
黃令葦,全燕鳴,王榮輝
(華南理工大學 機械與汽車工程學院,廣州510641)
近些年來,自動導引車(AGV)在物料運輸、電力巡檢等方面得到廣泛應用。為完成工作任務,AGV 需進行自主運動規劃,實現從起點到終點的運動,主動避開障礙物。其中由于A*算法作為一種靜態路網中求解最短路徑最有效的方法被廣泛應用。
不少學者對其進行了研究。文獻[1]在評價函數中引入懲罰因子和獎勵因子, 解決了傳統A* 算法拐點多的問題;文獻[2]使用多層變步長搜索策略和姿態角信息,文獻[3]基于二叉堆優化,兩者均加快了路徑搜索效率, 但所得軌跡拐點數均有增加;文獻[4]采用雙向預處理結構減少冗余節點數,但增加了路徑長度;文獻[5]在評價函數中引入機器人轉向所需時間,減少了路徑拐點,縮短了路徑規劃所需時間,但目前僅能在靜態環境下運行。
以上研究均未能解決一個關鍵問題——傳統A*算法所得路徑易與障礙物十分接近, 對AGV 運行帶來安全隱患。而且,此時AGV 為保證避開障礙物,需要降低速度。故在此改進評價函數,引入障礙物距離,提高AGV 運行過程的安全性及工作效率。
1 環境建模
對于AGV 的運行環境, 可以用二維柵格單元進行劃分。對于一個大小為n×m 的柵格地圖,可以根據某一個柵格位置是否有障礙物將地圖分為2種區域, 即可行駛區域和不可行駛區域。當n=10,m=10 時,柵格地圖如圖1 所示。圖中,白色柵格為可行駛區域,灰色柵格為不可行駛區域。
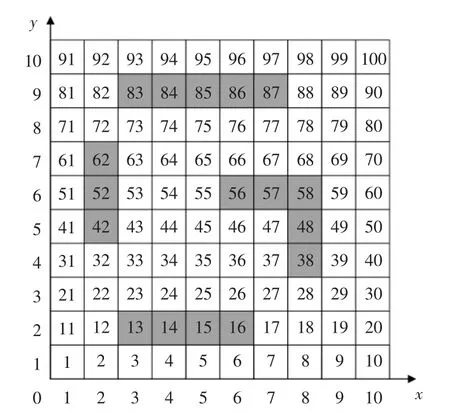
圖1 柵格地圖Fig.1 Grid map
定義集合P={1,2,…,n*m}表示所有的柵格編號,對于編號為i∈P 的柵格對應的坐標Pi=(xi,yi)有
式中:mod()為取余函數;int()為向下取整函數。
2 安全A*算法
2.1 傳統A*算法
傳統的A* 算法是在Dijkstra 算法的基礎上引入啟發式函數,用于引導路徑的搜索方向。算法的評價函數為

該算法步驟描述如下:
步驟1初始化2 個列表openlist 和closelist。openlist 用于存放已生成而未訪問的節點,closelist用于存放已訪問過的節點。
步驟2將起始點加入openlist。
步驟3若openlist 為空,則結束算法。否則計算代價最小的節點,并將該節點添置最優路徑。
步驟4對當前節點n,以4 鄰域或8 鄰域的方式計算鄰節點,遍歷openlist 和closelist。若均不包含鄰節點,則將其加入openlist。
步驟5循環執行步驟3 和步驟4,直至算法結束。
2.2 安全A* 算法
所提出的安全A* 算法是在傳統A* 算法代價函數的基礎上,引入當前節點n 距最近障礙物的代價,從而使生成的路徑遠離障礙物,保證路徑的安全性,提高工作效率。
在拔樁過程中,假定管樁被土體掩埋,且地下水位降至樁底以下,此時為最不利情況。如圖1所示,樁體受力作用分別為:樁體上拔力F,樁體自重G,樁底下吸力P以及樁周摩擦力 f。
2.2.1 凸走廊生成
要找到距n 的最近障礙物,需要計算柵格地圖M 中每一個柵格到n 的距離, 這樣做的效率很低,因此參考文獻[6],在此引入了凸走廊的概念。節點n對應的凸走廊如圖2 所示。圖中,黑灰色節點為n;淺灰色節點為所生成的凸走廊;A,B,C,D 為該凸走廊的4 個頂點。

圖2 節點n 對應的凸走廊Fig.2 Convex corridor corresponding to node n
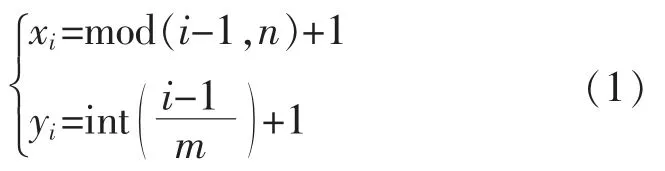
本文生成凸走廊的方法為: 以n 為起始點,按順序依次沿y 軸正向y+,y 軸負向y-,x 軸正向x+,x軸負向x-進行擴展,當到達地圖邊界或遇到障礙物時停止擴展。其算法流程如圖3 所示。

圖3 凸走廊生成流程Fig.3 Flow chart of convex corridor generation
圖中,ylo,yup,xlo,xup的計算公式為
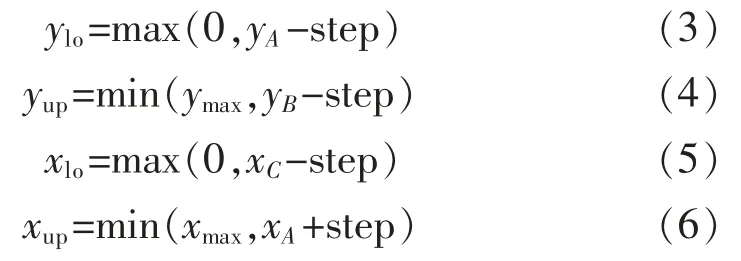
式中:xmax為地圖在x 方向柵格的個數;ymax為地圖在y 方向柵格的個數;step 為搜索步長。
2.2.2 搜索最近障礙物
生成凸走廊后,選取安全距離safe_dis,該值可根據實際需求更改,取值范圍為[0,min(length,width)],其中length 和width 分別為凸走廊的長和寬。然后,以n 為中心生成方形安全區域S,如圖4 所示。
圖中, 白色邊框包圍的區域為safe_dis=3 時的安全區域S。計算該區域中每一個障礙物到n 的距離,找到最小值min_dis。其算法流程如圖5 所示。
2.2.3 評價函數改進
將傳統A*算法的評價函數改為

式中:d(n)為n 到障礙物的代價;neutral_cost 為中等代價值,在此取常數50。
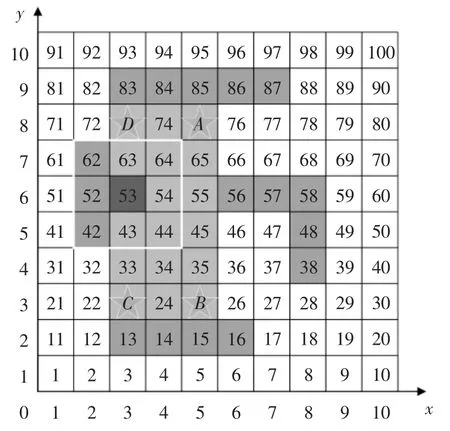
圖4 生成的安全區域Fig.4 Generated security area

圖5 最近障礙物搜索流程Fig.5 Flow chart of nearest obstacle search
3 仿真試驗
為驗證該算法的有效性,在此進行仿真試驗。試驗用計算機CPU 為Intel 酷睿i5-4200H 型,內存8 GB,在Gazebo 和機器人操作系統ROS (robot operating system)平臺下進行仿真試驗,仿真用AGV 為麥克納姆輪系。仿真的三維環境及其膨脹地圖如圖6 所示, 考慮到計算柵格距離方法的不同會帶來影響,統一設置使用曼哈頓距離計算。
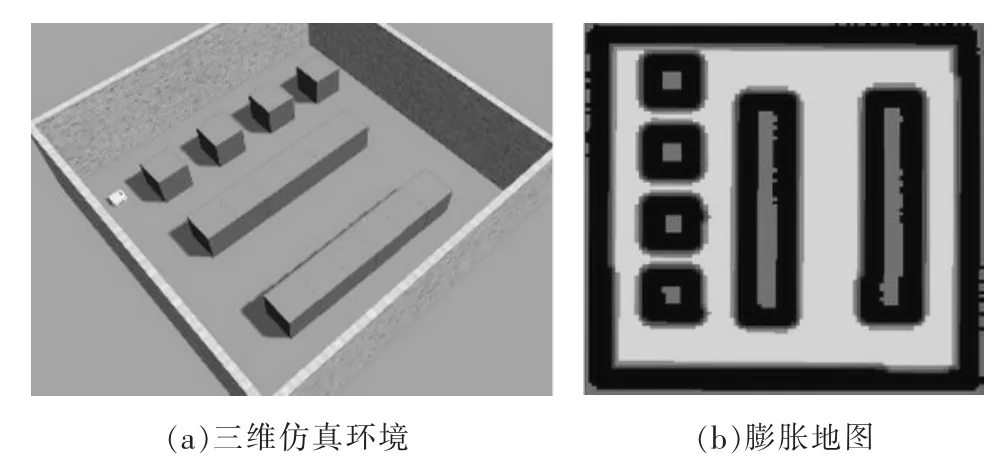
圖6 仿真的三維環境及其膨脹地圖Fig.6 Simulation of 3D environment and its expansion map
設置safe_dis=min(length,width),分別使用傳統A*算法和安全A*算法進行仿真試驗,結果如圖7 所示。圖中,路徑的起點為S,終點為E。可見在當前情況下,由于safe_dis 較大,圖7(a)中路徑所在通道寬度較小,所有點的代價值較大,故會優先選擇圖7(b)所示通道寬度較大處的路徑。
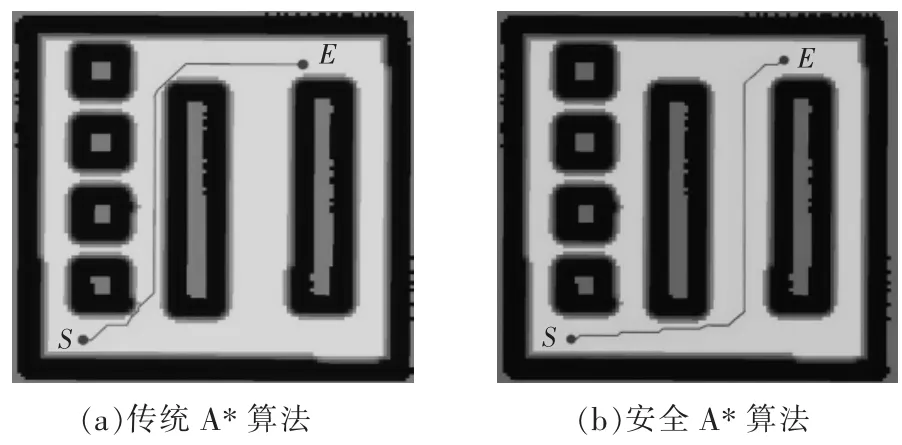
圖7 不同算法所得到的路徑Fig.7 Paths obtained by different algorithms
選取相同起點與終點, 分別進行10 次路徑規劃后的統計結果見表1。

表1 算法改進前后10 次的結果統計Tab.1 Result statistics of 10 runs before and after algorithm improvement
由表可知, 雖然安全A* 算法所得平均路徑長度比傳統A* 算法長5.64%, 但其每個路徑點到最近障礙物的平均距離增加了50.00%,AGV 沿路徑運行平均速度提高了42.86%,平均所需時間減少了22.57%。
由于設置不同的safe_dis 對結果會產生影響,故令

式中:α 為取值權重。在此,對α 取不同值后,分別進行試驗,結果統計見表2。
由表可知,隨著safe_dis 取值增大,所規劃路徑的長度呈上升趨勢,到最近障礙物的平均距離呈上升趨勢,平均運行時間呈下降趨勢,平均運行速度呈上升趨勢。這說明在該范圍內,safe_dis 的取值應該越大越好。
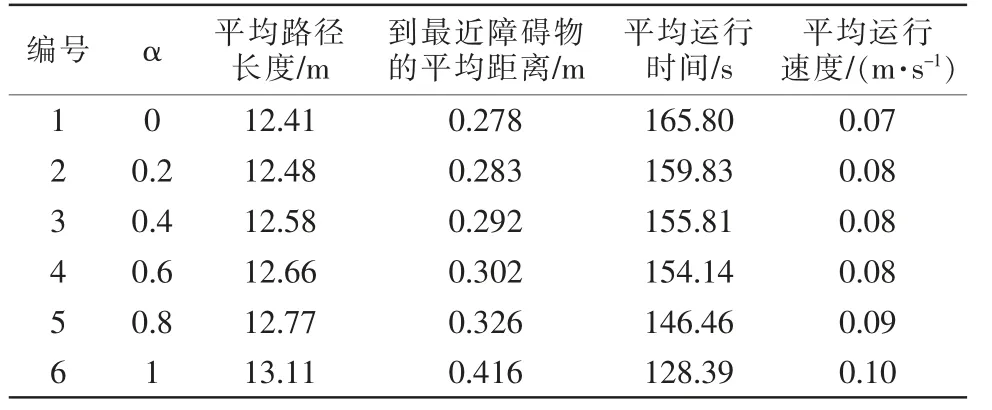
表2 α 不同取值時安全A*結果統計Tab.2 Safe-A* result statistics with different values of safe_dis
4 結語
利用提出的安全A* 算法,通過引入凸走廊,建立了安全區域, 得到了一條遠離障礙物的安全路徑。經過試驗驗證,相比于傳統A*算法,安全A*算法提高了AGV 在運行過程中的安全性, 有效降低安全事故發生的概率, 且由于到障礙物的距離增大,可以給AGV 發送更大的速度指令,因此也縮短了AGV 執行任務的時間。