
封閉式仿生螺旋纏繞軟體夾持器的設計與研究
2021-02-05 02:10:42曹毅顧蘇程翟明浩王保興鄧小龍
北京航空航天大學學報 2021年1期
曹毅,顧蘇程,翟明浩,王保興,鄧小龍
(1.江南大學 機械工程學院,無錫214122; 2.江蘇省食品先進制造裝備技術重點實驗室,無錫214122;3.江蘇信息職業技術學院 電氣工程系,無錫214153)
末端夾持裝置是機器人執行抓取任務的重要組成部分,傳統的剛性夾持器不具備通用性,要實現自適應抓取,則需要復雜的結構和控制,且容易造成接觸損傷。而現代工業生產中,產品呈現形狀尺寸多樣化,并且在農業和食品行業等特殊領域,其操作對象具有質地柔軟、易損壞、尺寸不一等特點[1-3],傳統的剛性夾持器已不能滿足復雜產品的抓取需求。軟體夾持器采用柔性材料,在抓取時具有較高的通用性和安全性,彌補了傳統夾持器的不足[4]。
基于國內外現有軟體夾持器的研究成果[5-8],根據抓取方式的不同,軟體夾持器可以劃分為半包絡式軟體夾持器[9]、全包絡式軟體夾持器[10]、顆粒塑形式通用軟體夾持器[11]及封閉式軟體夾持器[12]。在半包絡抓取方式方面,受吸盤和繩牽引的啟發,Wu等[13]設計了一款雙肢多腔吸附式軟體夾持器,并推斷出夾持器的有效抓取尺寸范圍;受海星附著礁石這一自然現象的啟發,Ilievski等[14]開發出一款適用于生化領域的六指軟體夾持器,常用于活體動物的抓取。在全包絡抓取方式方面,受蜂巢網格結構的啟發,王寧揚等[15]設計了一款全包絡軟體夾持器,制定了個性化的抓取策略,并構建了夾持器抓取的評價函數;郭鐘華等[16]設計了一款可通過控制充抽氣壓從而控制夾持器的開合角度、速度及夾緊力的軟體夾持器。在顆粒塑形抓取形式方面,Brown等[17]利用剛度可變原理,使軟體夾持器內部的填充物能夠可逆地在“類流體”狀態和“類固體”狀態之間相互轉換,設計了一款通用軟體夾持器。在封閉式抓取形式方面,受藤蔓纏繞的啟發,姚建濤等[18]設計了一款封閉式夾取的軟體夾持器,操作簡單,通過對氣動人工肌肉的充氣和放氣實現夾取和釋放物體。
綜上所述,當前軟體夾持器的研究大部分采用非封閉式抓取形式,普遍存在夾持力較弱、夾持不穩定等問題,而纖維增強結構能有效提高軟體夾持器的接觸力[19],結合封閉式抓取方式可有效提高軟體夾持器的負載能力和夾取穩定性,并且目前鮮有對纖維增強型軟體夾持器螺旋纏繞變形的理論研究。以此為研究背景,本文首先設計了一款封閉式仿生螺旋纏繞軟體夾持器;其次基于Mooney-Rivlin模型建立了驅動壓強與驅動器螺旋纏繞變形后端面扭轉角度的非線性數學模型,并通過仿真與實驗驗證了理論模型的正確性;最后通過仿生軟體夾持器封閉式抓取實驗可知,封閉式仿生軟體夾持器具有較大的負載能力、良好的抓取穩定性和目標適應性。
1 軟體夾持器結構設計及工作原理
如圖1所示,蛇在進行捕食或者攀爬時,身體呈現螺旋位姿,對被纏繞物體施加擠壓力,擠壓力可分解為徑向力和軸向力,徑向力用于防止物體的扭轉,軸向力用于防止物體的滑動,由于蛇自身肌肉的柔性特質可以適應不同形狀對象的纏繞,當蛇施加擠壓力時,能夠與物體表面充分接觸,增大接觸面積,有效增加軸向摩擦力,提高纏繞力度。
為模擬蛇纏緊獵物捕食的行為,提高軟體夾持器的負載力和夾持穩定性,設計了如圖2所示的封閉式仿生螺旋纏繞軟體夾持器。該夾持器由連接裝置、氣管、緊固套、軟體夾持套、纖維層和軟體夾持裝置組成,其中,軟體夾持裝置由螺旋纏繞驅動器和固定片構成。纖維層內嵌在軟體夾持套當中,固定片粘連在軟體夾持套內芯,螺旋纏繞驅動器逐次穿設于固定片的片孔,以此保持螺旋纏繞位姿。

圖1 蛇纏繞示意圖Fig.1 Schematic diagram of a snake winding

圖2 封閉式仿生螺旋纏繞軟體夾持器結構Fig.2 Structure of closed bionic spiral wound soft gripper
螺旋纏繞驅動器由5截相同單元驅動器通過密封硅膠連接而成,驅動器內部為偏心單氣囊空腔,厚壁邊內嵌入不可延展層,外部采用與徑向截面呈3°的纏繞方式,如圖3所示。壓縮空氣進入驅動器氣腔,氣腔充氣的同時發生徑向膨脹和軸向拉伸,受腔體厚壁及壁內不可延展層的限制,使驅動器產生向厚壁方向彎曲的效果。同時,在外部螺紋線圈的作用下,單元驅動器沿螺紋線圈引導的螺旋方向發生扭轉變形,2種變形相結合使驅動器實現螺旋纏繞彎曲變形。螺旋纏繞驅動器的設計以蛇的軀干為參考依據,通過固定片保持螺旋纏繞位姿,還原蛇纏繞的初始狀態,當空腔內施加壓強,驅動器發生扭轉變形,穿過固定片不斷螺旋向內收緊,從而夾住物體[20],驅動器與物體接觸,產生擠壓力,由于驅動器采用硅膠制成,和蛇具備同樣柔軟的特性,能夠與物體表面充分接觸,從而增大摩擦力,防止物體的脫離[21]。這一過程模仿了蛇纏食時軀體勒緊獵物的變化過程,接觸點受力及驅動器仰視變形如圖4所示。
螺旋纏繞驅動器采用纖維增強結構,驅動器外部纏繞螺紋線圈,不僅有效限制腔體的徑向膨脹,增強驅動器的彎曲效果,還引導驅動器端面的扭轉,使驅動器的變形以螺旋纏繞為主,增大了與物體的接觸力,提高了夾持穩定性。驅動器長度為550mm,根據文獻[22]相關實驗確定最優螺紋線圈纏繞角度為3°,為深入研究驅動器螺旋變形的運動特性,取單元驅動器,其結構尺寸如表1所示。

圖3 單元螺旋纏繞驅動器Fig.3 Unit spiral wound actuator

圖4 螺旋纏繞驅動器結構變形及受力示意圖Fig.4 Structural deformation and force diagram of spiral wound actuator

表1 單元螺旋纏繞驅動器結構參數Table 1 Unit spiral wound actuator structure param eters
2 軟體夾持器的理論建模
研究驅動器螺旋纏繞的變形機理及軟體夾持裝置的末端閉合特性,有助于預測和改善軟體夾持器的夾持性能,建立的理論模型可以為纖維增強結構的研究提供理論依據,由于軟體夾持器采用超彈性材料制成,故針對材料的非線性力學特性進行研究。
2.1 硅橡膠材料的應變能密度函數
由于螺旋纏繞驅動器需要實現較大的接觸力且形變較小,參考文獻[23]對硅橡膠材料硬度的詳細劃分,故選擇硬度為shore A50的硅橡膠,采用Mooney-Rivlin模型構建典型二參數形式應變能密度函數。

根據文獻[24],得到主應力T1、主應變λ1、張量不變量I1、I2之間的關系:

將T1/[2(λ1-1)]作為Y軸,1/λ1作為X軸,可以擬合成一次函數,結合拉伸實驗[19]所得數據(見圖5),計算出材料常數:C10=0.751 6,C01=-0.576 2。

圖5 拉伸實驗Fig.5 Stretching test
2.2 螺旋纏繞驅動器變形理論模型
驅動器變形理論模型只考慮驅動器充氣后受自身螺紋線、不可延展層、偏心孔結構影響下發生螺旋扭轉變形的數學建模,驅動器空腔施加壓強,空腔發生彈性變形,各向壁厚尺寸變化如下:

式中:L0和r0分別為變形后驅動器空腔中心軸線的長度和半徑;t1、t2、t3、t4為變形前驅動器空腔各向壁厚;t10、t20、t30、t40為變形后驅動器空腔各向壁厚。

式中:R0為變形后驅動器的半徑。

圖6 單元驅動器變形狀態對比Fig.6 Comparison of deformation state of unit actuator
已知驅動器長度一定,螺紋線圈均勻纏繞且不可伸長,忽略線寬,驅動器幾何形狀參數間的關系可表示為

式中:L1為變形后驅動器中心軸線的長度;C為螺紋線總長;N為繞線匝數;θ為螺紋線纏繞驅動器總角度;α為初始繞線方向與徑向截面的夾角。
由于螺紋線不可延展,有如下約束條件:

式中:δ為端面扭轉角度。
已知λ2=λ3,變形前硅膠所占的體積為Vt,腔體充氣變形后,內部氣壓所占體積為Vr,則

由硅膠的不可壓縮性可知

式中:Vt為驅動器變形前硅膠所占體積;Vt0為驅動器變形后硅膠所占體積。驅動器螺旋纏繞變形過程無外力作用,只考慮氣壓P所做的功,由虛功原理可知
式中:

其中:d Vr/dδ、d W/dδ均可表示為只含有δ的函數。則驅動器扭轉角δ與輸入壓強P的關系表達式為

2.3 軟體夾持裝置末端閉合特性分析


式中:A2O1=r1。

圖7 螺旋纏繞驅動器視圖Fig.7 Schematic diagram of spiral wound actuator
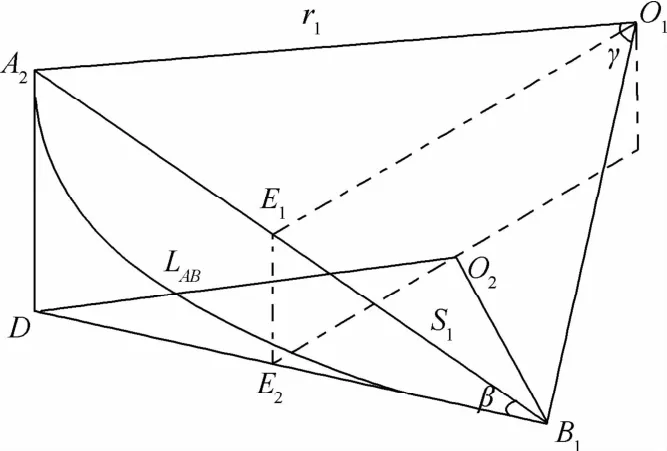
圖8 驅動器局部路徑幾何關系Fig.8 Local path geometry diagram of actuator
由于驅動器均勻螺旋纏繞,則螺旋纏繞驅動器總長為

式中:Z為驅動器繞圈匝數。
又

得

建立螺旋纏繞結構的內切圓半徑R2的數學模型,需考慮固定片的影響,即

所以
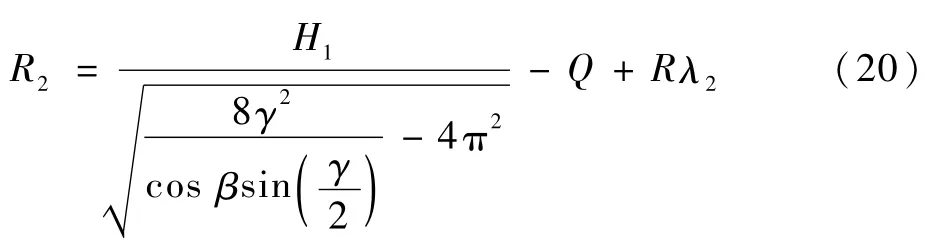
式中:β=22.5°;γ=90°;Q=12.5 mm。
聯立式(3)可得

通過上述公式,可以預測軟體夾持器可夾持物體的范圍。
3 螺旋纏繞驅動器仿真與實驗驗證
3.1 單元驅動器螺旋纏繞變形有限元仿真
螺旋纏繞驅動器由5截相同單元驅動器通過密封硅膠連接而成。以單元驅動器為例,對其端面扭轉角進行研究。為驗證驅動器變形理論模型的正確性,更加直觀地展示驅動器在不同驅動壓強下螺旋纏繞的狀態。利用ABAQUS軟件進行有限元分析,在Solidworks中建立軟體驅動器、不可延展層和螺紋線圈的3D草圖,導入ABAQUS軟件,在軟件中設置軟體驅動器的材料屬性(C10=0.751 6,C01=-0.576 2),將不可延展層、螺紋線圈設置為纖維的材料屬性(彈性模量為31 067MPa,泊松比為0.36),將軟體驅動器、不可延展層和纖維線圈進行裝配約束并綁定,進行網格劃分,建立了仿真分析模型(包含21 754個單元,單元類型為Tet),在空腔中設定壓強,提交工作步進行有限元分析,觀察驅動器的仿真結果。圖9為單元驅動器在驅動壓強P=0.06MPa下的螺旋纏繞狀態仿真。
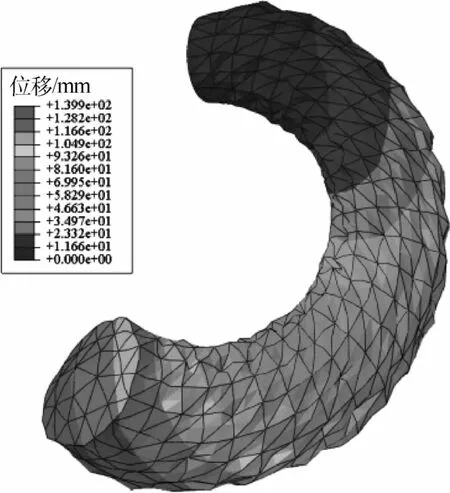
圖9 單元螺旋纏繞驅動器仿真示意圖Fig.9 Schematic diagram of unit spiral winding simulation of actuator
3.2 單元驅動器螺旋纏繞變形的實驗驗證
開展單元驅動器螺旋纏繞變形的實驗來進一步驗證驅動壓強與端面扭轉角理論模型的正確性。實驗步驟如下:首先制備實驗試件,過程如圖10所示。然后設計硬件實驗平臺,如圖11所示。空氣壓縮機負責提供氣源,經過氣動三聯件對氣源進行油霧分離和干燥處理,通過調節高精密減壓閥控制出口端壓力穩定,為實時顯示比例壓力閥的出口端與單元驅動器內部壓力值,在比例壓力閥的出口處接入三通,一路接入數字壓力傳感器,一路與單元驅動器相連,實驗平臺中,比例壓力閥和數字壓力傳感器由24 V直流變壓器負責供電,比例壓力閥的模擬電壓信號由STM32開發板傳輸,同時開發板負責數字壓力傳感器數據采集。
基于所搭建的硬件實驗平臺,在環境溫度為23℃、濕度為40%的室內進行實驗,采集不同氣壓下單元驅動器末端端面扭轉數據,不同氣壓下單元驅動器的變形狀態如圖12所示。

圖10 實驗試件制備流程Fig.10 Flowchart ofmanufacturing for experimental sample
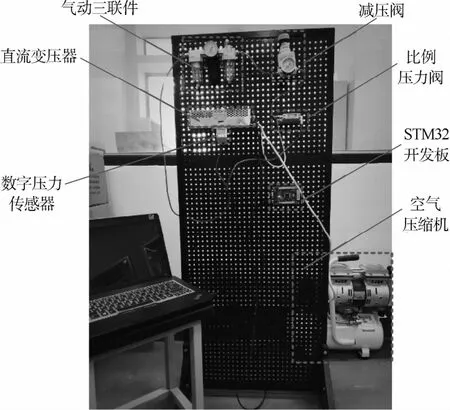
圖11 硬件實驗平臺Fig.11 Hardware experimental platform
在驅動器末端端面標定原點和初始水平軸線,驅動器施加不同驅動壓強發生螺旋纏繞變形,端面產生扭轉變形,將初始水平軸線與變化后軸線的夾角記為驅動器末端扭轉角,利用量角器測量,記錄為實驗值。表2為上述研究所獲得的單元驅動器在不同氣壓下末端端面扭轉角對應的理論值、仿真值及實驗值,并繪制出相對誤差,如圖13所示。通過計算可知,單元驅動器端面扭轉角仿真值與理論值的平均相對誤差為6.00%,實驗值與理論值的平均相對誤差為5.51%,證明了螺旋纏繞驅動器理論模型的正確性。

圖12 單元驅動器螺旋纏繞示意圖Fig.12 Schematic diagram of unit spiral winding of actuator

表2 螺旋纏繞驅動器末端端面扭轉角Table 2 End face torsion angle of spiral wound actuator

圖13 驅動器端面扭轉角相對誤差對比Fig.13 Torsion angle relative error comparison of actuator end face
4 軟體夾持器封閉式抓取實驗
4.1 螺旋纏繞驅動器抓取性能實驗
研究封閉式軟體夾持器的抓取性能,開展了螺旋纏繞驅動器抓取性能的實驗。實驗前先進行驅動器氣密性測試,發現驅動器氣密性良好,再給驅動器持續施加氣壓,驅動器實現纏繞豎直金屬桿的效果。圖14為施加200 kPa壓強,驅動器實現螺旋纏繞的狀態。實驗結果表明,驅動器設計的方案可實現理想的螺旋纏繞效果,具備夾持能力。

圖14 螺旋纏繞驅動器抓取性能實驗Fig.14 Grabbing experiment of spiral wound actuator
4.2 封閉式軟體夾持器抓取性能實驗
驅動器依次穿過固定片保持螺旋位姿固定于軟體夾持套內部,外部施加壓強,驅動器充氣產生膨脹和螺旋變形,由于軟體夾持套外壁嵌入纖維層,限制驅動器向外的膨脹,致使驅動器被動擠壓軟體夾持套的內壁,同時產生螺旋收緊的效果,如圖15所示,從而實現夾持物體的動作,利用軟體夾持套摩擦系數大的優勢來增加夾持器與夾取目標的摩擦力。
可靠抓取能力是評價軟體夾持器性能的重要指標,包括多目標抓取能力和抓取負載能力2個方面。在多目標抓取能力方面,考慮到產品的形狀多樣性,將產品形狀抽象成球狀、柱狀及異形3類對象進行實驗。考慮到產品材質屬性的不同,將產品抽象成硬質屬性和軟質屬性兩類對象進行實驗,實驗結果如圖16所示,表明軟體夾持器工作時具備良好的柔順性、目標適應性和安全性。在抓取負載能力方面,鑒于實驗條件所限,軟體夾持器可實現最大24.5 N的負載力,具有較大負載能力。綜上所述,軟體夾持器可廣泛用于多領域產品夾取,具有工程應用參考價值。

圖15 軟體夾持器充氣前后對比Fig.15 Comparison of soft gripper before and after inflation

圖16 軟體夾持器多目標抓取能力Fig.16 Multi-target grabbing ability of soft gripper
5 結 論
1)本文設計了一款封閉式仿生螺旋纏繞軟體夾持器,基于Mooney-Rivlin模型建立了驅動器螺旋纏繞變形的理論模型并對軟體夾持器的末端閉合特性進行分析,通過對單元驅動器進行仿真和實驗,證明了理論模型的正確性。
2)進行了針對封閉式螺旋纏繞軟體夾持器夾取性能的實驗,實驗結果表明,封閉式軟體夾持器具備良好的目標適應性,可實現不同形狀不同材質目標的穩定抓取,夾持器負載能力最大可達24.5N。
后續將以進一步提高軟體夾持器的負載能力、夾持穩定性為目標,從纖維增強結構的參數優化,夾持器與負載間摩擦系數的影響等方面進行研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
