基于SOM神經網絡的多工況駕駛風格識別
2021-02-06 15:01:16呂明張瀅馮先澤
汽車實用技術 2021年2期
呂明,張瀅,馮先澤
基于SOM神經網絡的多工況駕駛風格識別
呂明1,張瀅2,馮先澤3
(1.北京理工大學機械與車輛學院,北京 100081;2.華中師范大學數學與統計學學院,湖北 武漢 430079;3.浙江吉利汽車研究院,浙江 杭州 311200)
不同的駕駛員對車輛的各項性能可能有個性化地要求,因此有必要對駕駛風格的分類與識別問題進行研究。首先在駕駛模擬器上采集不同駕駛員在多工況下的數據,利用主成分分析法選取駕駛員在各個工況下的特征參數,SOM神經網絡分別對起步、加速及制動工況下的駕駛數據進行了聚類分析,然后以駕駛風格聚類分析結果為基礎,建立了基于SOM神經網絡的駕駛風格識別系統,該系統可根據駕駛員駕駛歷史數據來判斷其駕駛風格,最后以某一溫和型駕駛風格識別結果為例驗證了系統的合理性。
駕駛風格;主成分分析;聚類分析;SOM神經網絡
前言
駕駛風格是駕駛員習慣性的一種操縱行為[1],這種行為從很大程度上影響了車輛的駕駛狀態,同時與車輛的燃油經濟性[2][3]、乘坐舒適性[4]、行車安全[5]性等方面密切相關。
在現有的研究中,國內外學者們主要利用駕駛員的駕駛數據對其行為特征進行研究。考慮到后續使用的便利性等因素,將駕駛風格分為3~5類離散型分類方式較為常見[6],其中以3分類見多,駕駛風格可分為激進型(Aggressive)、普通型(Normal)和溫和型(Mild)[7]。Yuxiang Feng等[8]使用儀器車輛收集了三名參與者的真實駕駛數據,并將每個行程數據分割成不同的事件組,使用了支持向量聚類來獲得駕駛風格;同濟大學的程敏等[9]對基于駕駛員特征識別的機械式液力自動變速器換擋規律優化進行了研究,構建了基于隱馬爾可夫模型的駕駛員特征模型,用于辨識不同的駕駛特征。根據識別出的駕駛員特征模型參數,基于基本換擋規律,對不同特征下的換擋規律進行優化;X. Zhang等[10]通過遺傳算法Gipps模型和DBSCAN聚類算法直接獲得了駕駛員在跟馳工況下的駕駛風格。
原始數據的獲取通常是整個流程中極其關鍵的一步,原始數據的質量對于后續機器學習算法的應用效果影響顯著,主流方案有基于公共數據庫的數據挖掘分析和基于實車或者模擬器自采等方案,其中使用公共數據庫可以獲得超大數量的樣本量,樣本數據真實,但是通常缺少車輛內部的操縱數據,且大多數行程和場景設置不滿足具體研究要求,而使用模擬器自己采集數據的方案由于具有成本低,變量可控和場景設置方便等優勢因而應用更為廣泛。因此本文也選擇使用駕駛模擬器來獲取駕駛員在各個工況下的駕駛數據,對于采集到的數據進行數據預處理、聚類分析、模式識別分析等流程后,得到駕駛風格的分類識別情況,為駕駛風格識別奠定基礎。
1 數據采集
本文主要研究對象為適用于車輛縱向動力學控制的駕駛風格,因此將駕駛工況主要設定為起步、加速、巡航和制動,而在日常駕駛中,起步、加速、制動因存在速度或者加速度突變,涉及到自動變速器的液力變矩器或者離合器扭矩控制策略,是三個自動變速器控制需要著重考慮的工況。

圖1 駕駛模擬器實物圖
駕駛數據主要采集于搭建好的駕駛模擬器,所用駕駛模擬器如圖1所示。試驗場景為模擬場景中搭建的一條長為10km的平直混凝土路面,招募選取了10名具有機動車駕駛資格的成年人作為被試驗人員,每人進行多次試驗測試以保證試驗的準確性,分別采集到的起步、加速和制動工況數據為234組、208組和367組。
2 駕駛風格分類
2.1 聚類特征參數選取
在駕駛風格的研究中,主要使用的參數可以分為操作參數和狀態參數兩類。操作參數包括加速踏板位置、加速踏板位置變化率、制動踏板位置、制動踏板位置變化率等;狀態參數包括車輛縱向速度、車輛縱向加速度等。
如果使用單一參數將難以對駕駛風格進行較詳盡地描述,由于統計參數大都是由原始參數計算而來,冗余信息多,因此可以對這些特征參數進行挑選,以少量的特征參數對駕駛風格進行精確描述。
原始數據的預處理工作是一個相對成熟的步驟,可考慮主成分分析法(Principal Component Analysis,PCA),它是一種用降低維度來處理數據的方法,其基本原理是考慮到原始變量之間可能存在內部的隱性聯系,采用了矩陣變換和線性組合的方法來處理原始變量矩陣,從而形成幾個新的綜合指標[11],如式(1)所示,對于各主成分Yi的要求是相互線性無關。

式中:Y為第個主成分向量分量;x為第個原始變量分量;u為原始變量對應的系數向量分量,=1,2……,,=1,2……,。
將原始的特征參數通過線性組合成少量新特征,可以較大程度的解釋原始的特征,因此普通滿足的條件,通常要求所取的個主成分的累計貢獻率超過85%,累積貢獻率代表地是對原始特征信息的反映程度,累積貢獻率?如式(2)所示計算。

式中:λ為第個成分對應的特征根。
為了對主成分進行解釋,引入因子負荷量[12],它是某一主成分與某一原始變量的相關系數,若原始數據進行了標準化后,因子負荷量計算可簡化為如式(3)所示,由于因子負荷量和系數向量分量u成正比,因此每個原始變量分量的系數向量絕對值是可以反映該原始變量對某一主成分的影響大小。

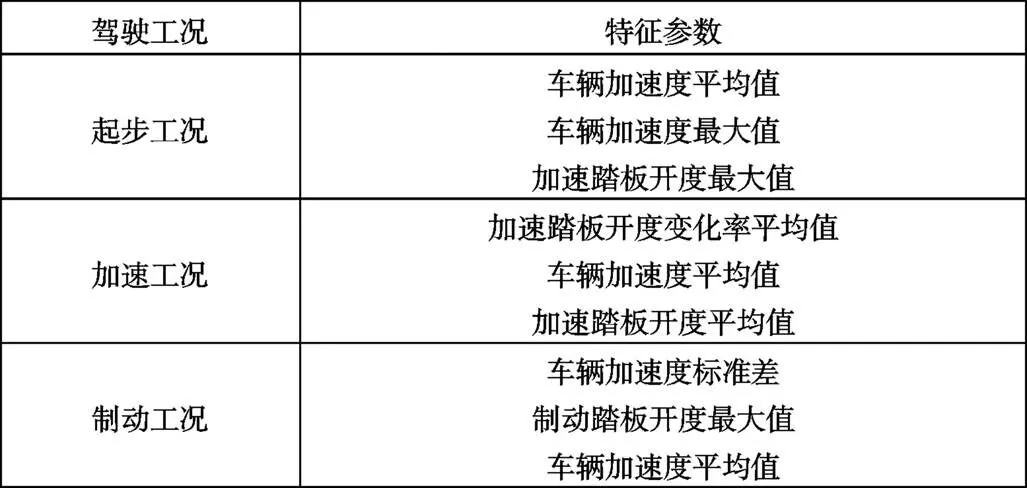
通過上述的PCA分析的方法分別對起步、加速及制動工況下的聚類特征參數進行選取,經選取在各工況下的特征參數如表1所示。
表1 多工況特征參數篩選結果
3 駕駛風格聚類分析
3.1 SOM神經網絡聚類分析算法
聚類分析指將物理或抽象對象的集合分組為由類似的對象組成的多個類的分析過程,在數學、統計學、機器學習和圖像識別等領域應用廣泛。本文采取自組織神經網絡(Self-Organizing Map,SOM)聚類算法來對駕駛風格進行分析,以期得到駕駛員的風格分類數據[13]。

最后根據WTA(Winner Take All)學習法則[15],如式(6)所示獲勝神經元輸出1,反之輸出0,只有獲勝神經元如式(7)才能夠調整其權向量W。
式中:表示的神經網絡學習輪數,此處和分別表示各神經元和輸出結果的序號,表示學習效率。
學習效率的范圍是0<<1,且隨著學習的過程進行減小,即調整的程度越來越小,從而逐漸靠近聚類中心。使用SOM神經網絡聚類分析相較于傳統的K-means聚類算法,不需要提前通過計算Silhouette值來判斷和賦值聚類超參數[16],減少了計算量。
3.2 聚類結果分析
以起步工況下駕駛風格聚類分析為例進行說明。本實驗中駕駛過程中縱向車速為0~20km/h的階段定義為起步工況[17]。
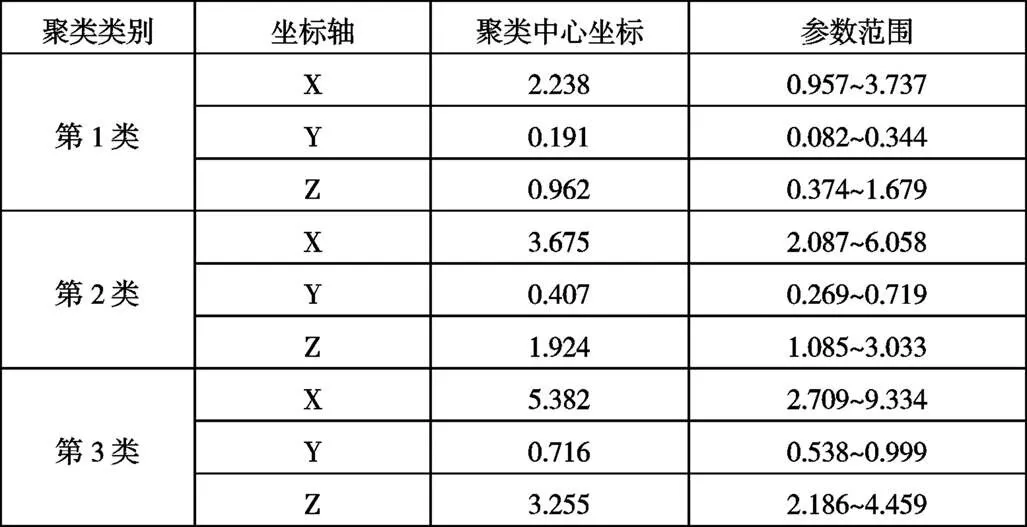
對進行完預處理的234組起步工況原始數據運用SOM聚類算法進行聚類分析。如表2所示一共得到三個聚類類別,每個類別包含的樣本數分別是83、80和71組,聚類樣本點在X、Y和Z軸方向的分布如圖2所示。
表2 起步工況SOM聚類歸一化還原結果

表2所示為SOM神經網絡聚類算法聚類結果,從第1類到第3類的聚類中心可知,X軸參數起步過程車輛平均加速度、Y軸參數起步過程加速踏板最大開度越來越大和Z軸參數起步過程車輛加速度最大值均出現增大趨勢。說明從第1類到第3類的駕駛風格變化過程中,駕駛員的動力性要求越來越高,可以認為第1類為溫和型駕駛員,第2類為普通型駕駛員,第3類為激進型駕駛員,本節的聚類結果可以作為起步階段駕駛風格識別的基礎。
表3 加速工況SOM聚類歸一化還原結果

結合SOM聚類算法的特征,同時考慮到建立駕駛風格識別模型的便捷性,本文后續建立的起步工況駕駛風格識別模型中選擇了本小節聚類分析訓練得到的SOM模型,即后續起步工況駕駛風格識別以SOM聚類分析結果為依據。
同理,使用與起步工況相同的算法,得到加速及制動工況下的SOM聚類結果,如表3及表4所示。
表4 制動工況SOM聚類歸一化還原結果
4 駕駛風格識別
4.1 駕駛風格識別方法
駕駛風格的識別這個方向有較多學者參與研究,大部分學者的研究成果都是基于一種機器學習算法得出的,當下常見的機器算法有支持向量機(Support Vector Machine,SVM)、BP神經網絡,SOM神經網絡、K近鄰算法(K-Nearest Neighbor,KNN)、邏輯回歸、樸素貝葉斯算法和決策樹等。本文進行駕駛風格聚類時采用了其中的人工神經網絡中的SOM網絡模型,考慮到SOM神經網絡模型同時具有較好的泛化能力和便捷性[18],因此在駕駛風格識別的模型中也直接采用了SOM網絡模型。
上文中駕駛員縱向操作工況被分解為了起步、加速和制動三種,并同時對每個工況的駕駛風格進行了分類,即駕駛風格的識別需要先對各個工況下的特征進行識別。在完成每個工況下駕駛風格識別之前,首要問題是如何先把駕駛工況識別出來,本文選擇的方案是以車輛的車速變化率為參數來進行識別。在識別出各個工況后,利用前文提出的方法進一步獲得各個工況下的特征參數。
由于駕駛員在一次駕駛過程中可能出現多個類型駕駛工況、每種類型的駕駛工況也可能出現多次,為了充分利用駕駛數據體現駕駛風格,每個識別到的工況數據都需要計算相應的特征參數并運用算術平均值的方式進行數據融合,將結果輸入給預先訓練好的SOM神經網絡聚類分析模型來得到最終分類結果。
圖3闡述了一種考慮了駕駛風格的車輛控制系統框架,要將模糊化的駕駛風格應用于控制時首先應考慮將其量化,本文提出的方案如下:使用i表示某工況下的駕駛風格指數,當駕駛員為溫和型時i取0,為普通型時取1.5,為激進型時取3。由上文可知,本文共識別了三個工況下的駕駛風格,為了綜合地評價駕駛風格,總的駕駛風格由此三個工況下的駕駛風格指數求算術平均值所得,使用表示總體駕駛風格指數,由i的取值可知的取值范圍為{0,0.5,1,1.5,2, 2.5,3},其中0表示最為溫和型、1.5表示普通型、3表示最為激進型。
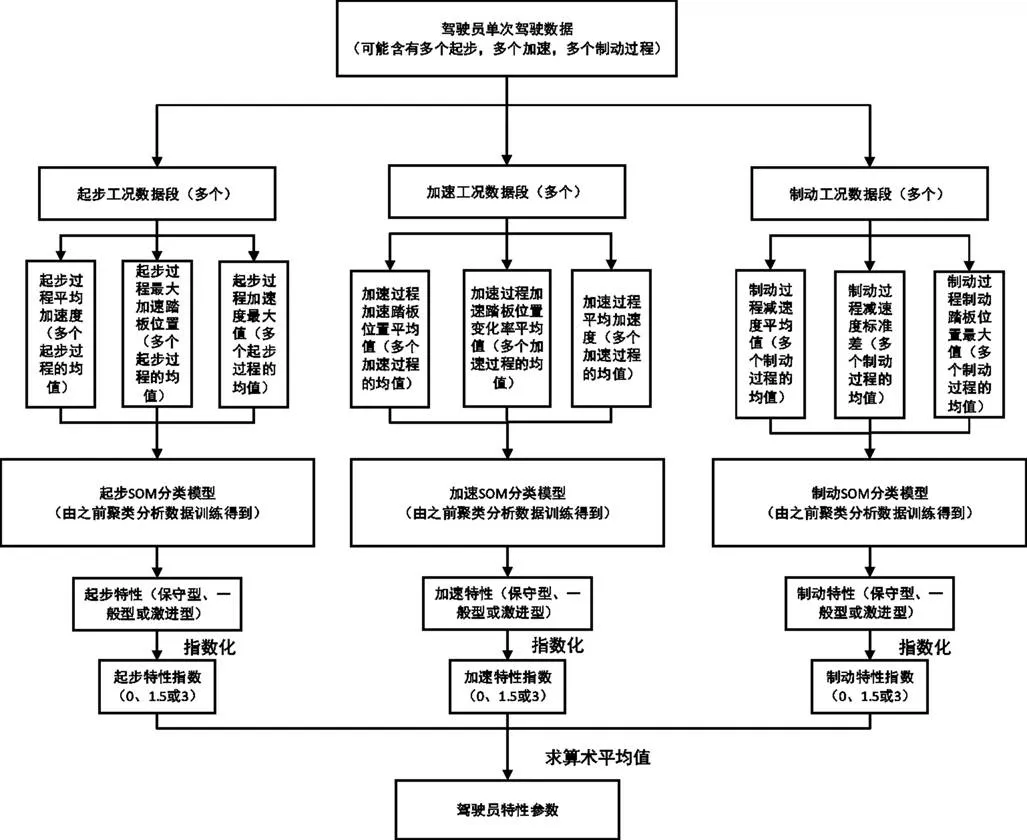
圖3 駕駛風格識別模型
4.2 駕駛風格識別結果
圖4展示的是一個已知為溫和型的駕駛員在駕駛模擬器上模擬駕駛得到的識別情況。圖中可以看到模型能夠較好識別出不同的工況。相應工況計算得到相應的駕駛風格識別參數如表5所示。

圖4 溫和型駕駛員工況識別
表5 駕駛風格識別參數
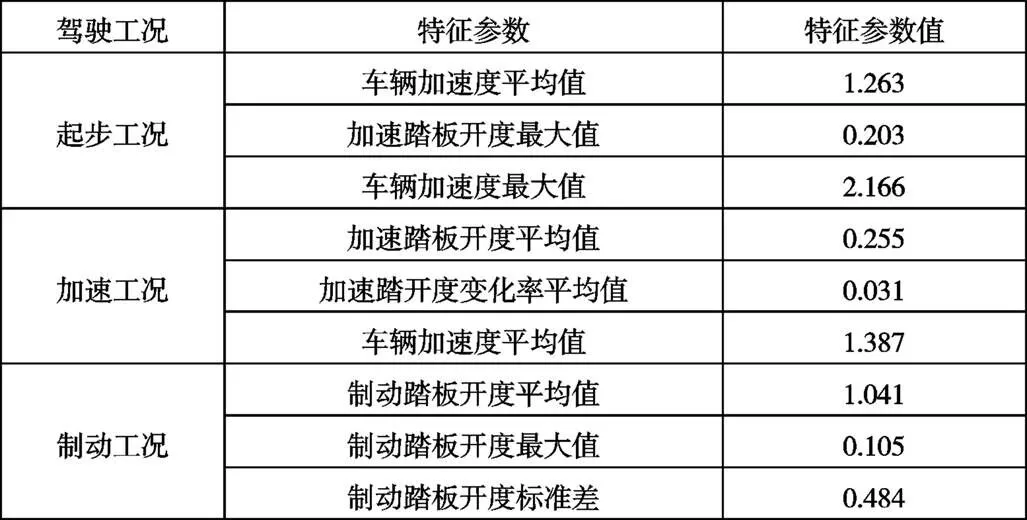
由此得到的駕駛風格識別結果如表6所示,將各個工況下的特征參數與前文相應工況下SOM聚類分析結果中作比較,可發現最終識別出的總體駕駛風格符合聚類分析結果,這說明駕駛風格識別模型可以較好的識別出溫和型駕駛員。
表6 駕駛風格識別結果
5 結論
本文對駕駛員在起步、加速及制動工況下的駕駛風格分類進行了研究,以起步工況為例使用SOM神經網絡聚類算法對采集到的駕駛數據進行了聚類分析,由此將起步工況下的駕駛風格分為了三種:溫和型、普通型和激進型,然后以聚類分析中訓練到的SOM聚類網絡模型為基礎建立了駕駛風格識別模型,最后以某一溫和型駕駛風格識別結果為例說明了模型的合理性和準確性。本文建立的駕駛風格識別模型將是基于駕駛風格的車輛自動變速器個性化控制的基礎。
[1] Lajunen, Timo. Self-Report Instruments and Methods[J]. Handbook of Traffic Psychology. 2011:43-59.
[2] Meseguer J E, Toh C K, Calafate C T, et al. Driving styles:a mobile platform for driving styles and fuel consumption characterization[J]. Journal of communications and networks,2017,19(2):162-168.
[3] Reza,Langari,Jong-Seob,et al. Intelligent Energy Management Agent for a Parallel Hybrid Vehicle Part-I:System Architecture and Design of the Driving Situation Identification Process[J].IEEE Transactions on Vehicular Technology, 2005.
[4] Schrauf, Michael,Bellem,et al.Objective metrics of comfort: Develo -ping a driving style for highly automated vehicles[J].Transportati -on Research Part F: Traffic Psychology & Behaviour, 2016: 45-54.
[5] T. H. Huang,V. Nikulin,L. B. Chen. Detection of Abnormalities in Driving Style Based on Moving Object Trajectories[C].2016 5th IIAI International Congress on Advanced Applied Informatics (IIAI- AAI),2016: 675 - 680.
[6] Xu L, Hu J, Jiang H, et al.Establishing Style-Oriented Driver Models by Imitating Human Driving Behaviors[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5):2522-2530.
[7] 李剛,南丁,楊志,李高超.駕駛員加速特征分類與辨識方法研究[J].現代制造工程,2019(11):74-78.
[8] Y. Feng, S. Pickering, E. Chappell, P. Iravani and C. Brace. Driving Style Analysis by Classifying Real-World Data with Support Vector Clustering[C].2018 3rd IEEE International Conference on Intelli -gent Transportation Engineering(ICITE),Singapore,2018,pp. 264- 268.
[9] 程敏,吳光強,祝勝.基于駕駛員意圖識別的液力機械式自動變速器換擋規律優化[J].機械與電子,2015,08:59-63.
[10] X. Zhang, Y. Huang, K. Guo and W. Li. Driving Style Classification for Vehicle-Following with Unlabeled Naturalistic Driving Data [C].2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 2019.
[11] 金輝,呂明.基于改進Fisher判別的起步工況駕駛風格研究[J].北京理工大學學報,2020,40(03):262-266.
[12] 何曉群.多元統計分析[M].中國人民大學出版社,2004.
[13] 張澤斌,張鵬飛,李瑞珍.基于自組織映射的高維優化參變量相關性研究[J].西北工業大學學報,2020,38(03):677-684.
[14] 楊挺,王雙雙,盆海波,王兆霞.基于改進SOM的壁畫圖像裂縫自動識別與修復[J].天津大學學報(自然科學與工程技術版),2020, 53(09):932-938.
[15] 趙文均.基于SOM和BP網絡的K均值聚類算法分析[J].電腦知識與技術,2020,16(09):24-26.
[16] 張琳.基于期刊聚類的科學結構研究[D].大連理工大學,2010.
[17] 馮先澤.基于駕駛員特征的自動變速車輛自適應換擋規律研究[D].北京理工大學,2017.
[18] 高利民,許慶陽,李鋒,楊吉,孟景輝,楊樹忠.基于SOM-BP混合神經網絡的道岔設備退化狀態研究[J].中國鐵道科學,2020,41(03): 50-58.
Driving style recognition based on SOM neural network under multiple driving conditions
Lv Ming1, Zhang Ying2, Feng Xianze3
(1.School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081; 2.School of Mathematics and Statistics, Central China Normal University, Hubei Wuhan 430079; 3.Geely Automobile Research Institute, Zhejiang Hangzhou 311200)
The performance of different drivers is usually personalized, so it is necessary to study the classification and recognition of driving style. Firstly, the driving data of some drivers in different conditions were collected in the driving simulator. Then the driver’s clustering characteristic parameters in such conditions were selected by principal component analysis. The collected driving data were clustered by SOM neural network clustering algorithm. Based on the cluster results, the diver’s characteristic identification model that was based on SOM neural network was built. It can identify the diver’s characteristic through the driving data. Finally, taking a conservative driving style recognition result as an example, the rationality of the recognition system is verified.
Driving style; Principal component analysis; Cluster analysis; SOM neural network
10.16638/j.cnki.1671-7988.2021.02.035
U467
B
1671-7988(2021)02-108-05
U467
B
1671-7988(2021)02-108-05
呂明,男,碩士研究生,北京理工大學機械與車輛學院,研究方向為智能車輛控制。
張瀅,男,碩士研究生,華中師范大學數學與統計學學院,研究方向為應用統計、機器學習。
馮先澤,男,碩士研究生學歷,浙江吉利汽車研究院,研究方向為汽車電子。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03
