彈體沖擊下測(cè)量光束的偏擺修正研究
2021-02-11 04:15:18田森段小艷張大治李新良賈志婷姜延歡
計(jì)測(cè)技術(shù) 2021年6期
田森,段小艷,張大治,李新良,賈志婷,姜延歡
(航空工業(yè)北京長(zhǎng)城計(jì)量測(cè)試技術(shù)研究所,北京 100095)
0 引言
激光干涉儀作為沖擊校準(zhǔn)裝置的標(biāo)準(zhǔn)量值傳遞設(shè)備,在科研院所和高校廣泛應(yīng)用,其最大測(cè)量速度為30 m/s,可實(shí)現(xiàn)沖擊速度、加速度等量值的可靠溯源和準(zhǔn)確復(fù)現(xiàn)。但隨著武器裝備的升級(jí)和儀器的精密化發(fā)展,現(xiàn)有校準(zhǔn)設(shè)備已不能滿足100 m/s強(qiáng)沖擊試驗(yàn)裝置沖擊速度校準(zhǔn)的需求[1],這主要是因?yàn)橄到y(tǒng)的性能不足,如在高沖擊速度情況下,衍射光柵的結(jié)構(gòu)強(qiáng)度和粘附強(qiáng)度會(huì)受到一定削弱,且在實(shí)際測(cè)量過(guò)程中很難保證高速運(yùn)動(dòng)目標(biāo)做直線運(yùn)動(dòng),砧體受到碰撞將會(huì)發(fā)生偏擺,固定于砧體上的光柵則隨之發(fā)生角度運(yùn)動(dòng)[2],會(huì)導(dǎo)致采集數(shù)據(jù)的丟失以及測(cè)量結(jié)果精度偏低。
光柵具有體積小、損耗低、耐腐蝕、易于組網(wǎng)等特點(diǎn),被廣泛應(yīng)用于光束測(cè)量試驗(yàn)中。國(guó)外在80 m/s以上的沖擊測(cè)量試驗(yàn)中發(fā)現(xiàn),隨著沖擊速度的提升,發(fā)生光柵脫落或變形的概率會(huì)升高,不僅會(huì)浪費(fèi)時(shí)間成本和經(jīng)濟(jì)成本,還會(huì)造成數(shù)據(jù)缺失甚至試驗(yàn)失敗。為滿足強(qiáng)沖擊試驗(yàn)裝置在100 m/s下的校準(zhǔn)需求,需做到以下兩方面:①需要深入優(yōu)化衍射光柵的自身結(jié)構(gòu)強(qiáng)度和粘接工藝,提高沖擊測(cè)量試驗(yàn)的效率。特別是在高速?zèng)_擊條件下,運(yùn)動(dòng)結(jié)構(gòu)具有復(fù)雜的動(dòng)態(tài)響應(yīng)[5],碰撞過(guò)程中砧體姿態(tài)的變化和劇烈擺動(dòng)也會(huì)降低光電信號(hào)的穩(wěn)定性,影響數(shù)據(jù)解算準(zhǔn)確度[3];②需要通過(guò)降低測(cè)量光束的偏擺角度[4],使其在一定范圍內(nèi),從而使干涉光斑不會(huì)脫離光電接收器的敏感面,以達(dá)到測(cè)量光束偏擺修正的目的[8],并將試驗(yàn)結(jié)果的偏差降到最小,從而提高測(cè)量準(zhǔn)確度,保證試驗(yàn)的準(zhǔn)確性和穩(wěn)定性。
本文采用LS-DYNA軟件對(duì)光柵表面粘貼處的應(yīng)力應(yīng)變分布進(jìn)行性能分析[6],確定出該表面變形微位移量與測(cè)量光束偏擺角度的關(guān)系,通過(guò)對(duì)入射鏡組的合理選型與設(shè)計(jì),達(dá)到對(duì)測(cè)量光束修正的目的,不僅提高了系統(tǒng)的測(cè)量精度,而且還可以滿足強(qiáng)沖擊的測(cè)量需求[7]。
1 基于LS-DYNA的仿真分析
本文的研究對(duì)象為砧體表面的光柵結(jié)構(gòu),光柵與砧體的連接方式默認(rèn)采用膠接處理,但不同部分的接觸方式設(shè)置又會(huì)影響到計(jì)算結(jié)果的精度與解算時(shí)間。因此下文主要從LS-DYNA的解算特點(diǎn)與接觸處理兩方面進(jìn)行介紹[9]。
1.1 LS-DYNA特點(diǎn)
在有限元仿真計(jì)算中,針對(duì)多體動(dòng)力學(xué)研究對(duì)象的振動(dòng)、沖擊等高速碰撞問(wèn)題,一般選用LS-DYNA模塊進(jìn)行仿真分析。LS-DYNA的非線性動(dòng)力學(xué)仿真模塊可以求解二維、三維等非線性結(jié)構(gòu)在高速碰撞、瞬時(shí)爆炸、高速?zèng)_擊下的力學(xué)問(wèn)題。特別是對(duì)于其中涉及到的大變形、大位移、大轉(zhuǎn)速等情況,都可以構(gòu)建相應(yīng)的力學(xué)結(jié)構(gòu)模型,完成對(duì)應(yīng)的計(jì)算。
將n個(gè)時(shí)間步時(shí)刻劃分成多個(gè)節(jié)點(diǎn),平均每個(gè)節(jié)點(diǎn)處的加速度向量表示為[10]

式中:為外加力向量,包括在單元網(wǎng)格中每個(gè)節(jié)點(diǎn)處的值;tn為終止步驟時(shí)刻;為內(nèi)力向量。其組成中分向量公式為[11]

式中:為質(zhì)量矩陣;為內(nèi)力向量,主要包括應(yīng)力場(chǎng)等效節(jié)點(diǎn)力、沙漏阻力以及接觸力。其中,應(yīng)力場(chǎng)等效節(jié)點(diǎn)力可由單元節(jié)點(diǎn)位移和剛度矩陣相乘得到;Ω為等效結(jié)點(diǎn)數(shù);Fhg為沙漏阻力,主要包括控制單元的體積、密度、瞬態(tài)移動(dòng)速度等參數(shù);Fcontact為兩接觸面直接存在的接觸力大小。
對(duì)每個(gè)節(jié)點(diǎn)處的速度ˉ、位移向量ˉ進(jìn)行明確表示,其計(jì)算公式為

針對(duì)速度和位移向量中涉及到的時(shí)間節(jié)點(diǎn)要求,對(duì)所有時(shí)間公式進(jìn)行重新定義計(jì)算,則時(shí)間點(diǎn)公式分別為
改進(jìn)后,低體溫、并發(fā)癥合計(jì)發(fā)生率低于改進(jìn)前,改進(jìn)后患者滿意率與醫(yī)師滿意率高于改進(jìn)前,差異有統(tǒng)計(jì)學(xué)意義(P<0.05)。 見(jiàn)表 1。
對(duì)于一些非線性問(wèn)題的求解,一般采用靜態(tài)隱式算法,其中需要涉及到大量的矩陣運(yùn)算以及反復(fù)的迭代。針對(duì)本文強(qiáng)沖擊條件下的仿真分析,引用LS-DYNA中顯示動(dòng)力學(xué)模塊,可以有效解決邊界條件接觸設(shè)置等問(wèn)題。此算法的主要特點(diǎn)是對(duì)于復(fù)雜的矩陣不需要求逆,采用中心差分公式直接進(jìn)行求解。內(nèi)向量的計(jì)算可以不需要檢查收斂的情況,通過(guò)設(shè)置小的時(shí)間步來(lái)保持穩(wěn)定的狀態(tài)。
中心差分公式是一種顯示算法,其特點(diǎn)是穩(wěn)定計(jì)算,為了準(zhǔn)確求解強(qiáng)沖擊條件下的砧體碰撞問(wèn)題,必須要設(shè)置較小的時(shí)間步長(zhǎng),保證其小于一個(gè)特定的臨界值,這樣可以確保結(jié)果收斂,其臨界時(shí)間步長(zhǎng)要求為[13]

式中:ωmax為結(jié)構(gòu)的固有頻率。
求解具體問(wèn)題時(shí),時(shí)間步長(zhǎng)必須小于該方程計(jì)算得出的某個(gè)臨界值。由于顯示算法具有時(shí)間步長(zhǎng)小、計(jì)算過(guò)程方便、求解結(jié)果精度高的特點(diǎn),因此LS-DYNA中的顯示動(dòng)力學(xué)法適用于瞬態(tài)問(wèn)題的分析。
1.2 LS-DYNA中的接觸處理
在高速碰撞沖擊條件下,各部分相接觸的材料類型、接觸方式均存在差別,通常情況下采用罰函數(shù)法和約束法兩種方法進(jìn)行求解。兩種方法的區(qū)別是在有限元分析中接觸設(shè)置的特點(diǎn)不同,需要根據(jù)兩接觸面的結(jié)構(gòu)尺寸參數(shù)與材料本身特性計(jì)算出具體的接觸剛度大小,從而選擇合適的方法。若兩個(gè)接觸面的材料剛度差別較小,可采用罰函數(shù)法進(jìn)行處理;若兩個(gè)接觸面的材料剛度有較大差別,則采用約束法進(jìn)行處理,即通過(guò)采用接觸的節(jié)點(diǎn)質(zhì)量和全局的時(shí)間步長(zhǎng)計(jì)算線性接觸彈簧的剛度,與材料本身的性能不發(fā)生關(guān)聯(lián)。
本次的仿真對(duì)象是帶有毛氈緩沖墊的砧體金屬結(jié)構(gòu),端面的固定裝置也采用金屬材料制成,所以在子彈撞擊毛氈時(shí),毛氈與砧體尾部的接觸設(shè)置采用約束法進(jìn)行處理,通過(guò)將節(jié)點(diǎn)質(zhì)量除以時(shí)間步長(zhǎng)的平方與比例因子的乘積來(lái)確定穩(wěn)定性,從而得到可靠的剛度值。通過(guò)引入罰函數(shù)因子明確罰函數(shù)的具體物理意義,完成對(duì)非線性接觸剛度的處理。
2 沖擊砧體的結(jié)構(gòu)仿真
在高速?zèng)_擊條件下,砧體上的光柵會(huì)由于外激勵(lì)的影響發(fā)生偏擺,造成輸出結(jié)果產(chǎn)生一定的誤差。因此,本文通過(guò)有限元仿真軟件ANSYS/LS-DYNA模塊[13],模擬分析運(yùn)動(dòng)的砧體結(jié)構(gòu)及合作目標(biāo)在不同速度值下結(jié)構(gòu)表面應(yīng)變和應(yīng)力分布趨勢(shì)。由于光柵與砧體結(jié)構(gòu)連接處采用鑲嵌式連接,默認(rèn)合作表面上的狀態(tài)即為光柵的變形情況。通過(guò)對(duì)不同速度值下的模型進(jìn)行計(jì)算,結(jié)合投影到各個(gè)平面上的位移尺寸,確定光柵發(fā)生偏移的距離和角度,為入射鏡組的合理選型與設(shè)計(jì)提供重要參考。
2.1 幾何模型
完整的沖擊砧體結(jié)構(gòu)由毛氈、砧體和保護(hù)蓋三部分組成。尾部一側(cè)為深度13 mm,直徑26 mm的圓柱孔,其主要作用是放置不同厚度的毛氈結(jié)構(gòu),根據(jù)試驗(yàn)需求獲得理想的脈寬參數(shù)。毛氈作為緩沖材料,采用天然動(dòng)物纖維制成,其集聚粒子的效果好、單位面積集聚容量大、壓力損失低并且具有較強(qiáng)的緩沖性能。毛氈的材料性能參數(shù)如表1所示。

表1 毛氈材料的力學(xué)性能參數(shù)Tab.1 Mechanical property parameters of felt material
砧體的側(cè)面鑲嵌光柵,光柵的粘貼層是寬度為5 mm,長(zhǎng)度為21.5 mm的矩形凹槽結(jié)構(gòu),保證粘貼上的光柵兩端不會(huì)因?yàn)閺?qiáng)大的沖擊力而造成損傷。砧體結(jié)構(gòu)所采用的材料是鈦合金,伸長(zhǎng)率δ=25%,材料屬性如表2所示。

表2 鈦合金材料的力學(xué)性能參數(shù)Tab.2 Mechanical property parameters of titanium alloy materials
鈦合金材料具有較強(qiáng)的韌性和強(qiáng)度,為了保證與實(shí)際測(cè)試的情況相符合,在沖擊砧體的另一端面外加一個(gè)保護(hù)蓋,保證光柵的端面不會(huì)出現(xiàn)磨損或者斷裂。設(shè)計(jì)完成的砧體結(jié)構(gòu)如圖1所示。
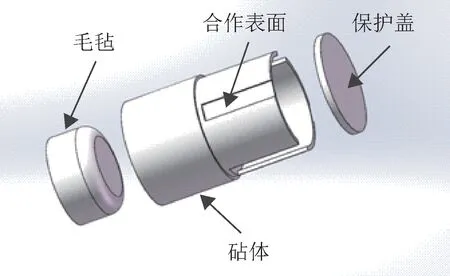
圖1 結(jié)構(gòu)模型Fig.1 Structure model
2.2 仿真模型計(jì)算
彈體的整體結(jié)構(gòu)為圓柱形,砧體結(jié)構(gòu)的前端位置尺寸較薄,在ANSYS/LS-DYNA中傳統(tǒng)劃分網(wǎng)格的功能比較弱,映射劃分(Map)和掃瓊劃分(Sweep)對(duì)幾何形狀的要求都很高。四面體網(wǎng)格雖能與實(shí)際相配合,但是由四面體結(jié)構(gòu)劃分出的單元網(wǎng)格數(shù)目多余六面體,會(huì)給后期的解算造成一定的麻煩,又考慮到在計(jì)算過(guò)程中砧體的端面極易出現(xiàn)單元變形過(guò)大而導(dǎo)致的負(fù)體積,結(jié)合實(shí)際參數(shù)與測(cè)量位置需求,砧體結(jié)構(gòu)采用殼單元?jiǎng)澐志W(wǎng)格[14],通常選擇shell181為中等厚度的殼結(jié)構(gòu)定義單元類型。該單元類型有四個(gè)節(jié)點(diǎn),每個(gè)節(jié)點(diǎn)上又存在六個(gè)自由度,可以完全滿足不同類型結(jié)構(gòu)在X,Y,Z方向上的平動(dòng)以及轉(zhuǎn)動(dòng)。退化的三角形選項(xiàng)用于網(wǎng)格生成的過(guò)渡單元[15-16],由于其具有非線性功能,特別適用于高速?zèng)_擊仿真試驗(yàn)。在砧體與剛性材料沖擊碰撞的仿真中,通過(guò)在端面設(shè)置一個(gè)剛性單元來(lái)模擬約束。劃分網(wǎng)格后的模型和施加邊界條件后的模型如圖2和圖3所示。
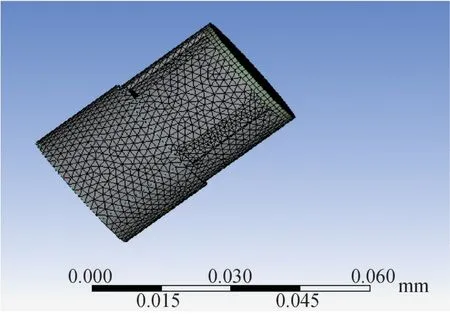
圖2 網(wǎng)格劃分模型Fig.2 Meshing model
圖3 邊界條件施加模型Fig.3 Boundary condition apply model
2.3 仿真分析計(jì)算結(jié)果
速度是影響砧體結(jié)構(gòu)侵徹性能的重要因素,在高速?zèng)_擊條件下,不同速度會(huì)造成砧體表面發(fā)生不同程度的變形,本文研究速度v=100 m/s時(shí),砧體粘貼層表面變形與測(cè)量光束偏擺的對(duì)應(yīng)關(guān)系,其不同時(shí)段的應(yīng)變?cè)茍D如圖4所示。
圖4 v=100 m/s時(shí),不同時(shí)段變形云圖Fig.4 Deformed cloud images in different periods wher v=100 m/s
從圖中可以看出,當(dāng)t=10μs時(shí),彈體發(fā)生移動(dòng)并與毛氈逐漸接觸,彈體結(jié)構(gòu)內(nèi)部開(kāi)始發(fā)生擠壓變形,但由于其抗拉強(qiáng)度較高,足以抵抗沖擊造成的影響。在t=30μs時(shí),砧體側(cè)壁有輕微變形,由于速度沿著彈體一直傳遞到砧體表面上,受到距離的限制,所以砧體變形量略小。當(dāng)t=50μs時(shí),砧體的變形開(kāi)始從側(cè)壁的兩端向粘貼層位置擴(kuò)散,砧體的整體結(jié)構(gòu)出現(xiàn)擠壓現(xiàn)象。因?yàn)檫吘壧幍膽?yīng)力集中較大,接觸面積小,應(yīng)力會(huì)沿著所受抗力較小之處發(fā)生流動(dòng),所以變形量相對(duì)于粘貼層位置大很多。在t=70μs時(shí),隨著速度和沖擊能量達(dá)到最大值,砧體結(jié)構(gòu)的變形也較為明顯,主要以擠壓為主。砧體選用的材料是鈦合金,強(qiáng)度較高、韌性較強(qiáng),側(cè)壁有向外擴(kuò)張的趨勢(shì)。粘貼層位置處的變形對(duì)測(cè)量光束偏擺影響最大,因此采用數(shù)值提取法,獲取粘貼層處在X方向上的最大變形值為0.398 mm,Y軸與Z軸方向上的最大變形如圖5所示,分別為0.004 mm和0.081 mm。
圖5 Y軸與Z軸方向的變形云圖Fig.5 Deformed cloud in Y-axis and Z-axis directions
3 光路偏擺修正
砧體與光柵的連接處發(fā)生不同方向的微位移量,導(dǎo)致光束測(cè)量產(chǎn)生相應(yīng)的偏差。為了達(dá)到對(duì)光束測(cè)量修正的目的,需要借助光柵的衍射原理進(jìn)行分析計(jì)算,光柵衍射滿足公式[19]

式中:d為光柵常數(shù);θ為衍射角;λ為入射光波波長(zhǎng),μs。
擬研制的激光測(cè)速儀的光路結(jié)構(gòu)通過(guò)設(shè)計(jì)和計(jì)算,需要保證其入射光的+1級(jí)和-1級(jí)衍射光的衍射角θ垂直于光柵面。若砧體表面上的光柵發(fā)生偏擺,設(shè)偏擺角為α,則干涉光束將產(chǎn)生2α角度的偏轉(zhuǎn),如圖6所示。偏擺角度的大小可以根據(jù)在光柵表面處投影的位移量計(jì)算得出。偏擺角度較大時(shí),會(huì)導(dǎo)致干涉信號(hào)超出反射鏡范圍,引起信號(hào)中斷,從而影響測(cè)量結(jié)果[17]。
圖6 光柵發(fā)生偏擺時(shí)對(duì)干涉光束角度影響示意圖Fig.6 Schematic diagram of the influence of the angle of the interference beam when the grating is deflected
3.1 光路偏擺坐標(biāo)搭建
為了確定測(cè)量面偏擺與平移時(shí)的具體情況,將與反射表面垂直,朝向鏡組方向設(shè)為X軸正向,待測(cè)振動(dòng)位移方向設(shè)為Z軸,同在反射面且與振動(dòng)位移垂直的方向設(shè)為Y軸,等軸光線坐標(biāo)系如圖7所示。
考慮三個(gè)軸方向上的位移情況:沿Z軸、Y軸的運(yùn)動(dòng)分別為待測(cè)振動(dòng)的方向和光柵縱向延伸的方向,對(duì)回光偏移均無(wú)影響。沿X軸的運(yùn)動(dòng)可以分為兩種情況:一種是Z軸方向上的振動(dòng)微動(dòng),位移不超過(guò)5 mm,這種近距離微動(dòng)仍然處于平凸透鏡的前焦面附近,后面的平行光束的角度波動(dòng)在2 mrad(0.1146°)之內(nèi),也不會(huì)超出后續(xù)鏡組的直徑范圍;另一種是Z軸的放置距離受實(shí)際情況限制,會(huì)產(chǎn)生十幾毫米至幾十毫米的偏差。距離偏大時(shí),最大可接收偏角逐漸減小,且強(qiáng)度逐漸減弱,例如當(dāng)遠(yuǎn)離10 mm時(shí),在一定偏擺角度范圍內(nèi),仍可接收到光,但光束已經(jīng)開(kāi)始不完整;當(dāng)遠(yuǎn)離25 mm時(shí),受限于平凸透鏡與最后的第二級(jí)雙凸鏡的直徑,可接收偏角變小,且光強(qiáng)度、質(zhì)量大幅下降。距離偏小時(shí),容許范圍相對(duì)較大,最大可接收角減小得很少,光仍可進(jìn)入鏡組,但在不調(diào)整接收面距離的情況下,光線會(huì)過(guò)度偏折離開(kāi)接收器,例如靠近10 mm時(shí),5.5°仍可接收,接收光斑直徑稍有擴(kuò)大;靠近30 mm時(shí),接收光斑直徑擴(kuò)大一倍,可容許接收偏擺角下降至3°。總的來(lái)說(shuō),若偏擺角較小,則距離控制十分寬松,若隨機(jī)偏擺角較大,則距離控制就需要提升精度[19]。
考慮三個(gè)軸方向上的旋轉(zhuǎn)情況:當(dāng)圍繞Z軸或Y軸旋轉(zhuǎn)時(shí),會(huì)造成偏擺角度的旋轉(zhuǎn),假設(shè)Z軸方向與出射光線確定的平面平行,則Y軸的容許角度會(huì)比Z軸稍大,原因是由于出射光口徑的大小和裝配結(jié)構(gòu)損失帶來(lái)的影響。又由于都采用的是圓反射鏡,圍繞以Z-Y平面上的方向?yàn)檩S的在最大容許角內(nèi)的偏擺都可以投射至接收面。圍繞X軸的旋轉(zhuǎn),幾乎沒(méi)有影響,不會(huì)帶來(lái)偏轉(zhuǎn),在接收面上記錄的強(qiáng)度分布方向有所旋轉(zhuǎn),不影響測(cè)量。
3.2 光路鏡組補(bǔ)償設(shè)計(jì)
光束偏擺的基本路徑是:從測(cè)量反射表面的偏擺衍射光先經(jīng)過(guò)平凸透鏡后減小了斜射程度,再經(jīng)過(guò)近似于平行的斜向45°的圓平面反射鏡反射到第二平面反射鏡,待光線近似平行出射后進(jìn)入旁路接收光路鏡組,最后經(jīng)過(guò)兩級(jí)縮束減角透鏡組投射在接收面上,偏擺鏡組光路補(bǔ)償路徑示意圖[18]如圖8所示。
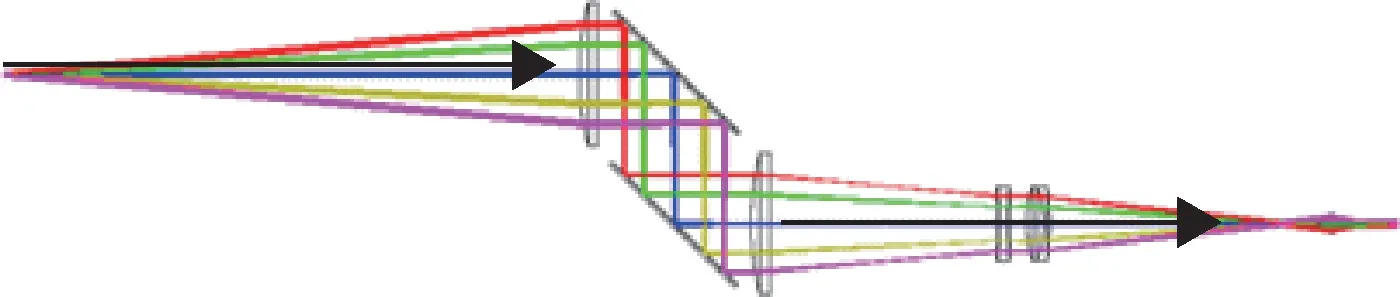
圖8 光路補(bǔ)償路徑Fig.8 Optical path compensation path
各個(gè)極值路徑的位移偏移量與光電元器件的參數(shù)具體如下:從待測(cè)表面射出的光,在無(wú)偏擺的情況下是直徑為3 mm垂直入射的平行光束,若有偏擺,則為帶有徑向偏擺角度的3 mm斜入射平行光束。一般情況下,此偏擺角為小角度,最大不超過(guò)10°,由于最前方的平凸透鏡的鏡頭口徑為76.2 mm無(wú)法更改,且必須距離待測(cè)表面300 mm左右,則根據(jù)試驗(yàn)環(huán)境需求,可確定最大可接收偏擺角為7.2°,但受限于裝配誤差,且從平凸透鏡出射的測(cè)量光束的口徑減少了可利用的直徑,結(jié)合上述動(dòng)力學(xué)的仿真計(jì)算結(jié)果,通過(guò)提取投影在Y-Z平面上的變形傾斜量(即Y軸和Z軸方向上的位移量),并結(jié)合反正切函數(shù)的計(jì)算方法,可以計(jì)算出單側(cè)偏擺角度α=arctan(0.004/0.081)=3.1°。實(shí)際會(huì)產(chǎn)生2α角度的偏轉(zhuǎn),則實(shí)際最大可接收偏擺角為6.2°,即超出此角度的光已經(jīng)無(wú)法射入鏡組中。為保證后續(xù)光線質(zhì)量,遵循入射光的+1級(jí)和-1級(jí)偏擺衍射光的基本原理,建議將偏轉(zhuǎn)角控制在±5.2°之間。
確定了偏轉(zhuǎn)角的合理范圍后,需要對(duì)鏡組進(jìn)行選型與設(shè)計(jì)。由入射光于是從透鏡前焦面射入的,平凸透鏡后的光近似為平行光,根據(jù)這束光的直徑可以確定平面反射鏡的直徑為92.2 mm,兩個(gè)反射鏡只是起轉(zhuǎn)向作用,直徑相同。第二反射鏡之后就是兩級(jí)縮束鏡組。第一級(jí)縮束鏡組設(shè)計(jì)縮束倍數(shù)為2倍,為與轉(zhuǎn)向后的光束口徑匹配,第一個(gè)透鏡也使用76.2 mm,焦距為300 mm的平凸透鏡,第二個(gè)透鏡為直徑40 mm,焦距為150 mm的雙凹透鏡,此時(shí)的最大偏角的光束口徑被縮減為30 mm左右。第二級(jí)縮束鏡組設(shè)計(jì)縮束倍數(shù)為8倍,為與第一級(jí)光束口徑匹配,同時(shí)減少前向的累積球差,第一個(gè)透鏡使用直徑40 mm,焦距為120 mm的雙膠合透鏡,第二個(gè)透鏡為直徑10 mm,焦距為15 mm的雙凹透鏡,此時(shí)的最大偏角以內(nèi)的光束口徑被縮減到小于4 mm的范圍內(nèi),單角度光束的口徑為3.5 mm左右,便于投射到接收器上。兩級(jí)用來(lái)壓縮光線偏角的鏡組綜合壓縮倍數(shù)為16倍。最后透鏡與接收面的距離可以根據(jù)實(shí)際的要求微調(diào),但最終的偏擺角度控制在±5.2°之間,符合實(shí)測(cè)要求[20]。
4 總結(jié)
針對(duì)高速?zèng)_擊情況下,光柵偏擺造成測(cè)量結(jié)果不準(zhǔn)確的問(wèn)題,利用動(dòng)力學(xué)仿真,發(fā)現(xiàn)在v=100 m/s的情況下,粘貼位置的兩側(cè)變形最大,并呈現(xiàn)出由外向黏貼層內(nèi)的擴(kuò)展趨勢(shì),特別是在切線方向上變形較大。建議后期光柵結(jié)構(gòu)在布置設(shè)計(jì)方面應(yīng)確保砧體的固定端長(zhǎng)度略大于光柵的切向長(zhǎng)度。
入射鏡組選型設(shè)計(jì)方面,為了保證入射光的強(qiáng)度達(dá)到最大,測(cè)量精度達(dá)到最高,偏擺角最大范圍不超過(guò)±10°。結(jié)合動(dòng)力學(xué)仿真位移偏移量的結(jié)果,計(jì)算出了投影在Y-Z平面上的單側(cè)偏擺角為3.1°,雙側(cè)偏擺角為6.2°,按照遵循偏擺衍射光的基本原理,確定出最后的偏擺角為5.2°,通過(guò)選擇合理的鏡組類型,保證了入射光可以始終入射至探測(cè)器敏感部,最大程度上提高了激光的測(cè)量精度。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01