數字陣列雷達仿真系統設計
2021-02-15 08:49:32史小斌
火控雷達技術 2021年4期
趙 亮 史小斌
(西安電子工程研究所 西安 710100)
0 引言
雷達能全天候,全天時探測目標距離、速度、方向,在國防領域的地位舉足輕重。隨著雷達的數字化、集成化程度和系統復雜度越來越高,雷達的性能和功能有了質的飛越,而這也使得雷達研發過程面臨周期變長,成本研制花費大,各系統人員溝通困難等問題。為解決上述問題,有研究人員借鑒基于模型的系統工程(Model Based System Engineering,MBSE)思想,通過對系統需求和功能架構進行建模仿真,在物理實現前,通過虛擬仿真,提前暴露設計中問題,以模型代替文檔進行傳遞溝通[1-2],并提出雷達虛擬樣機概念[3],實現雷達裝備由經驗設計向仿真設計轉變。
雷達數字化建模仿真分為功能級仿真和信號級仿真[4],功能級仿真主要從能量角度對雷達性能進行判斷,仿真速度快但精度低,信號級仿真能夠模擬雷達各子系統輸入輸出信號的幅度和相位。信號級仿真又分為基帶信號級和中頻信號級,其中中頻信號級可模擬雷達在頻域上的處理,能對抗干擾措施、頻率分集寬窄脈沖雷達等進行仿真[5],仿真精度更高。本文基于Matlab/Simulink,以一S波段數字陣雷達為原型設計完成了一部較為完整的中頻信號級數字陣列雷達仿真系統,并具體描述系統設計構建過程。最后通過分析仿真數據驗證了仿真系統的可行性。該系統的實現可以給未來仿真系統的擴展以及雷達的系統設計、試驗評估提供參考。
1 S波段數字陣列雷達仿真系統設計
1.1 數字陣列雷達組成
數字陣列雷達系統由天線陣列、DDS、收發模塊、數字處理單元、數據處理和終端顯控組成,基本組成框圖如圖1所示。本文根據雷達實際工作流程和組成將雷達仿真系統分解為控制、天線、陣列發射、空間損耗、目標起伏、陣列接收、接收機、數字下變頻、數字波束形成、信號處理、數據處理、顯控幾個關鍵模塊,模塊間的輸入輸出關系如圖2所示。其中控制模塊負責控制波束指向、目標運動更新、目標起伏。天線模塊主要負責描述陣列模型,用于計算天線發射、接收增益、波束權值、接收信號。發射信號產生根據設定波形參數在每個仿真步長產生一個脈沖周期的發射信號。陣列發射根據發射波束權值和目標角度計算向目標輻射的信號。空間模塊對輸入信號進行延時、功率衰減、疊加多普勒頻移;目標起伏模塊根據設定的目標Swerling類型對輸入信號幅度進行調制。陣列接收模塊根據陣列模型計算天線接收信號。接收機給輸入信號添加噪聲。數字下變頻模塊將接收機輸出信號下變頻至基帶信號并降低信號采樣率,并對DDC的一些特性進行仿真。數字波束形成模塊負責形成和波束、方位俯仰差波束,其中包含權值計算模塊和波束形成模塊。信號處理模塊包含脈沖壓縮、MTI、MTD、GO-CFAR、測角模塊等;數據處理模塊接收檢測結果,處理后送至顯控界面顯示。
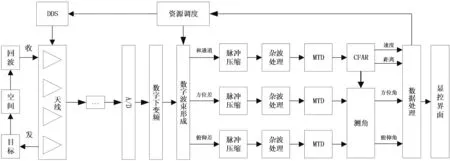
圖1 數字陣列雷達基本組成框圖
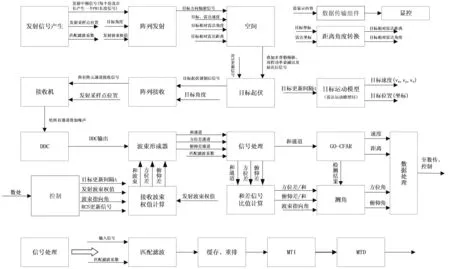
圖2 模塊間輸入輸出關系
本文通過對一部S波段數字陣雷達仿真以描述數字陣列雷達仿真系統的構建方法,該雷達雷達參數如表1所示。
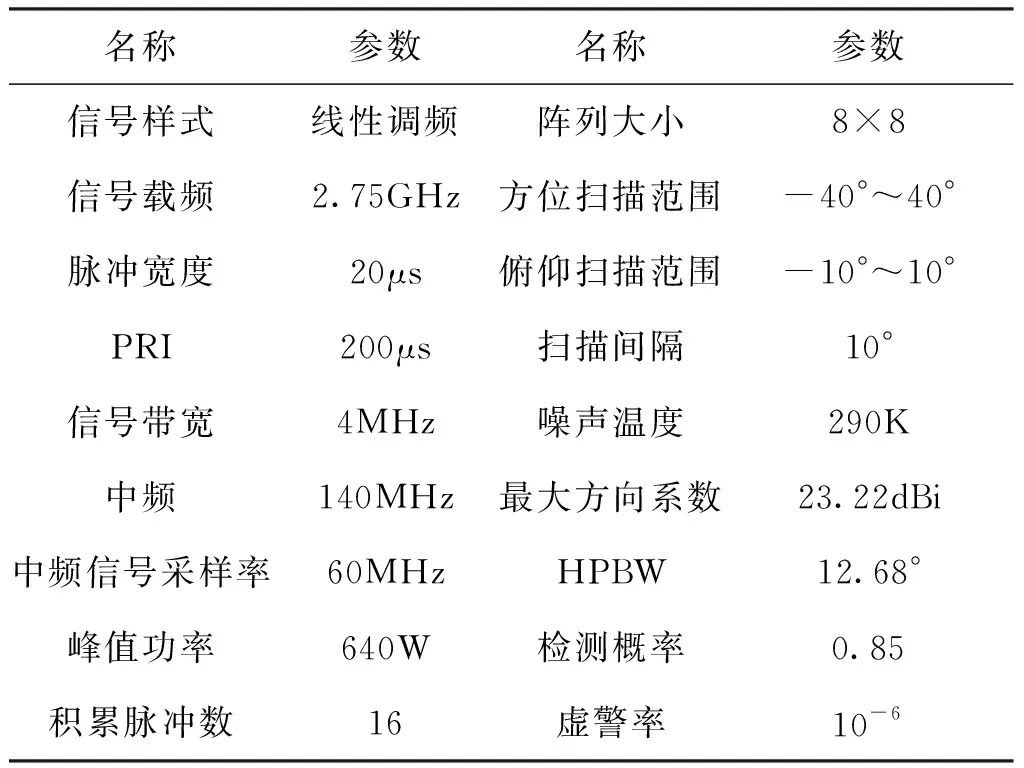
表1 雷達參數表
1.2 系統工作時序
仿真系統通過一個控制模塊控制整個系統工作時序,Simulink實現如圖3所示。控制模塊共四個輸出,分別為輸出目標更新間隔t、當前波束指向權值和指向角以及RCS更新信號。四個輸出的仿真步長同為波束駐留時間。其中目標更新間隔t和RCS更新信號(目標場模型見2.3節)輸出為一數組長度為N,N為一個CPI的脈沖數,在這兩輸出后接一個UnBuffer模塊將仿真步長轉換為PRI,即一個脈沖間隔,如圖4所示,以實現波束指向在一個CPI內保持不變,同時每隔一個PRI仿真一個脈沖周期的回波數據。
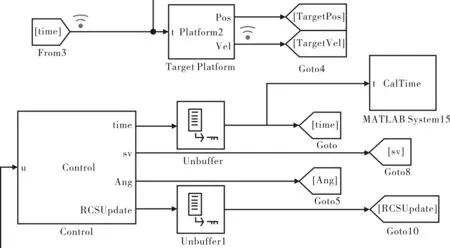
圖3 Control模塊
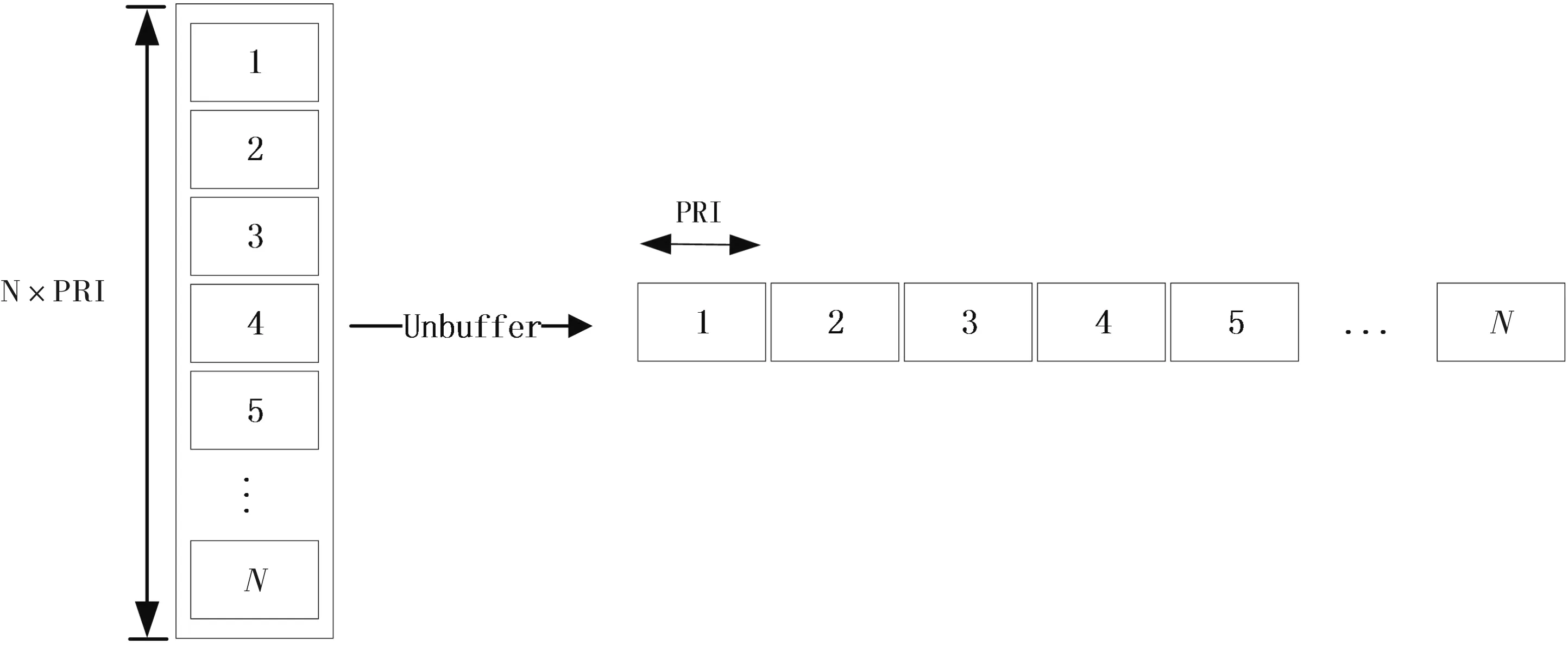
圖4 仿真步長轉換模塊Unbuffer輸入輸出
圖2中各模塊受前一模塊輸出激勵,繼承前一模塊仿真步長。每個仿真步長,模塊按圖2中箭頭指向順序執行,完成一個CPI的仿真后,Control再計算下一個仿真時刻的波束指向,進行下一個CPI仿真,時序如圖5所示。Control模塊輸出目標更新間隔t給目標運動模型模塊,輸出發射波束權值給陣列接收模塊。目標運動模型模塊輸出經距離角度轉換模塊后再輸出給陣列發射模塊,陣列發射根據收到的目標信息和發射波束權值計算向目標輻射的信號實現雷達波束指向和目標運動之間的關聯。
1.3 基于Simulink仿真系統架構
本文通過MATLABSystemObject編寫雷達組件,之后在Simulink中完成整個系統的搭建。MATLABSystemObject與C++中的類相似,其代碼結構如圖所示。雷達子系統的輸出數據與輸入數據和系統內部屬性、算法有關,通過SystemObject封裝子系統屬性和算法,子系統處理完每個仿真步長的數據后不會修改內部主要屬性不需要在內存中保存大量數據,且可在模塊間傳輸向量和矩陣信號實現基于數據流的仿真,顯著提升了仿真速度,且相控陣工具箱和DSP工具箱幾乎都采用 SystemObject開發,系統在開發和功能擴展上更容易。本文通過MATLABAppDesigner開發系統顯控界面,將Simulink組件分成雷達子系統組件和數據傳輸組件,通過數據傳輸組件獲取界面句柄,將仿真數據傳遞給界面公共屬性實現仿真數據的實時顯示。系統架構如圖6所示,Simulink模型如圖7所示。
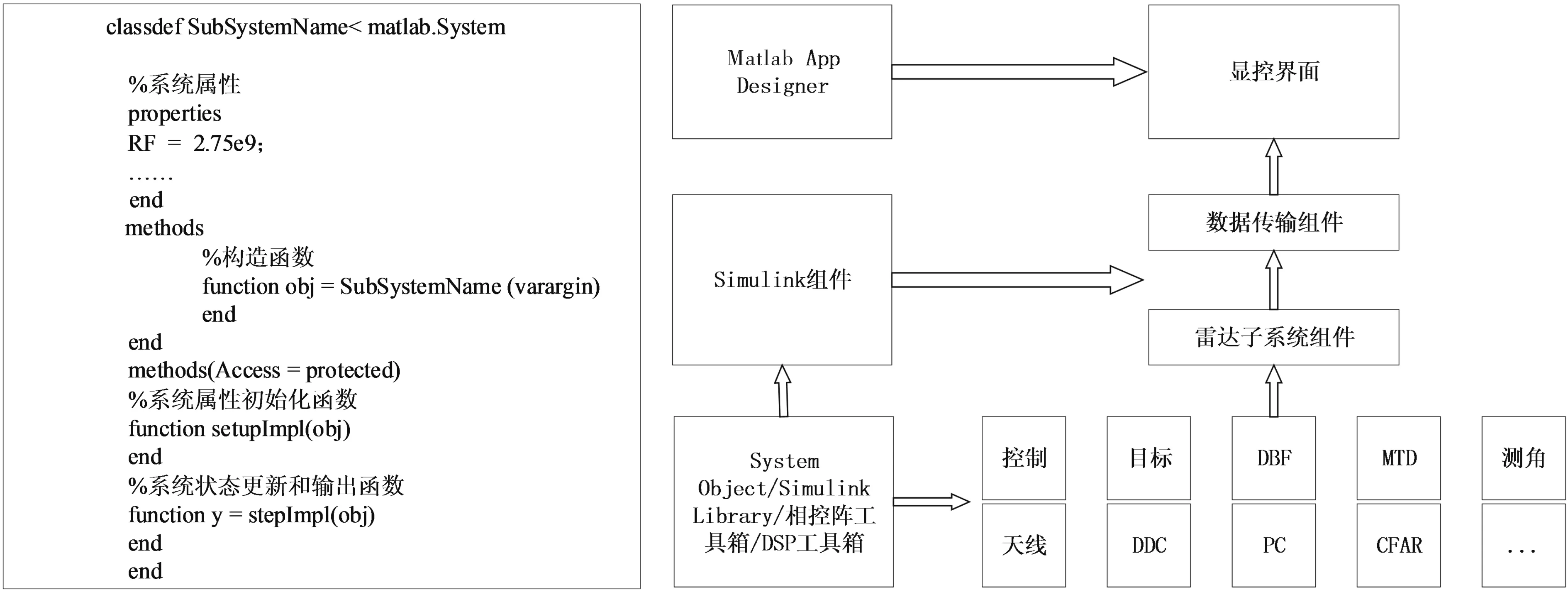
圖6 系統架構圖
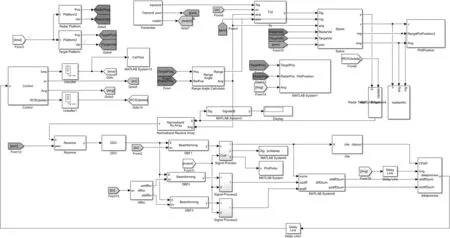
圖7 仿真系統Simulink模型
2 S數字陣列雷達仿真系統實現
2.1 陣列模型
2.1.1 窄帶信號陣列接收模型

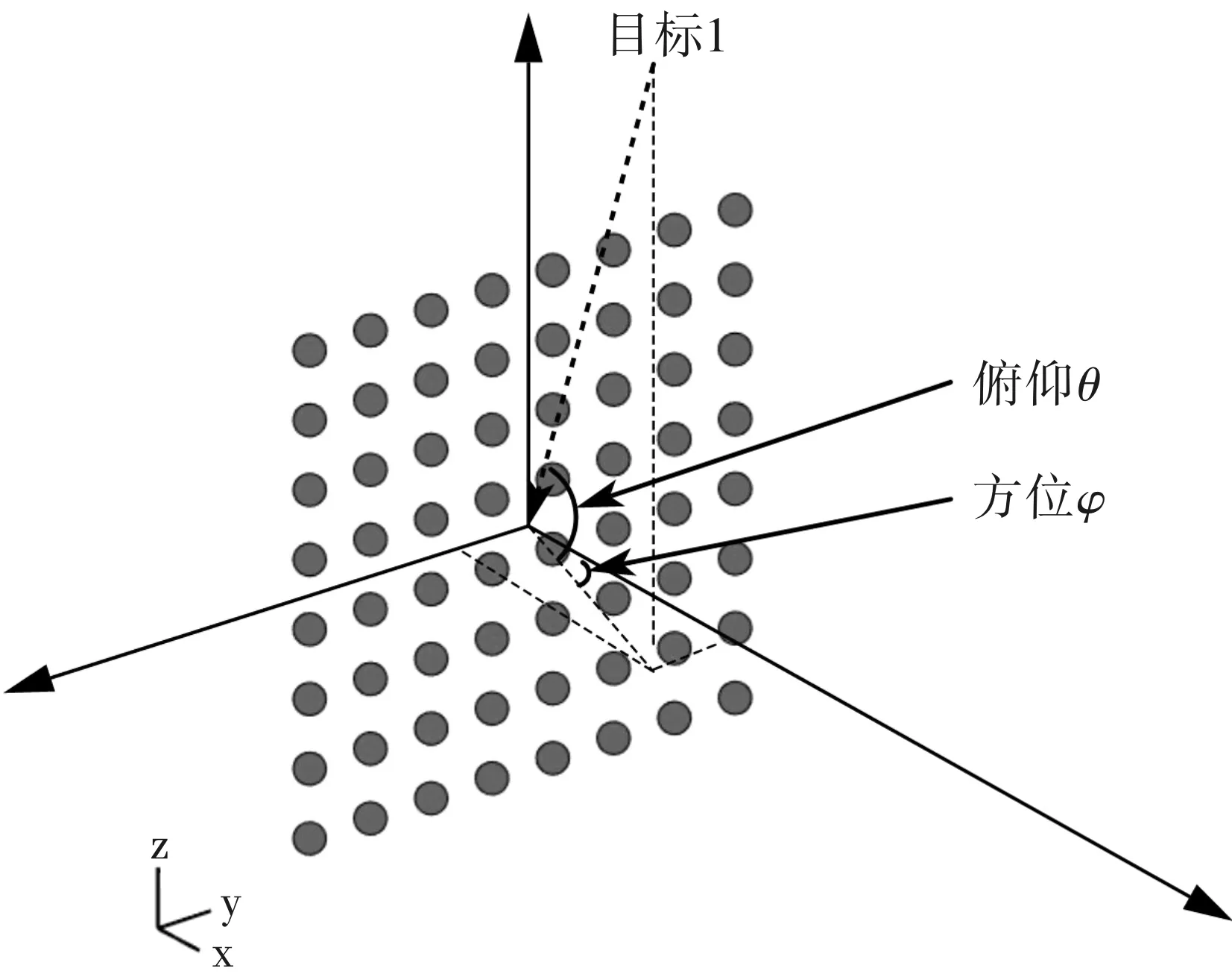
圖8 陣列模型

(1)

(2)
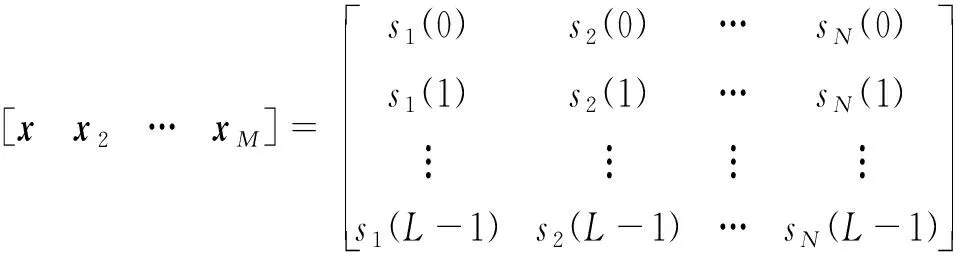
其中L為信號長度,可進一步簡寫為
X=SAT+N
(3)



(4)
2.1.2 天線方向圖
陣列天線方向圖計算方法如式(5)、式(6)所示。
F(φ,θ)=wHa(φ,θ)EP(φ,θ)
(5)
EP(φ,θ)=cosEP(φ)(φ)cosEF(θ)(θ)
(6)
式中w為復數權值矢量,EP為陣元方向圖,EF為陣元因子(Element Factor),當w對a(φ,θ)的信號同相相加時F(φ,θ)的模值最大。相控陣雷達在工作中通過改變w調整波束指向,若要使波束指向(φo,θo),可令w=a(φo,θo)。
在仿真中需要在圖中陣列發射模塊中計算指定波束指向時目標所在方向的天線方向系數,其精確計算式如式(7),離散計算式如式(8)[6],可通過計算機編程計算。
(7)
(8)
θ)方向的功率響應,Nφ,Nθ分別為方位角,俯仰角離散個數。
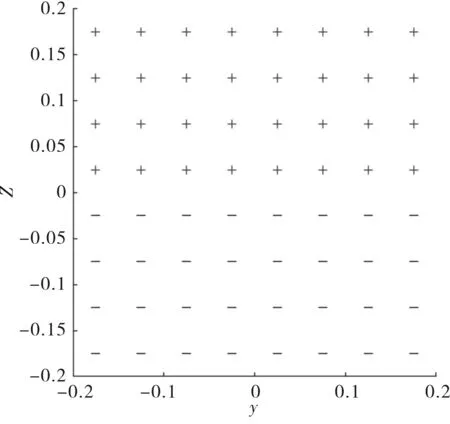
在本仿真系統中,陣元因子EF設為1,信號頻率f=2.75GHz,陣元在方位0°的切面方向圖(方向系數)如圖9所示。發射和接收波束均不賦形,陣列天線指向方位0°,俯仰0°時的方向圖如圖10所示,3dB波束寬度φ0.5=θ0.5≈12.68°,方向系數為23.22dBi。相控陣雷達在工作中按編排波位對空域進行掃描[7],仿真中,方位掃描范圍為±40°,方位范圍為±10°掃描間隔設10°,波位編排圖如圖11所示,波位編排在控制模塊初始化時計算,掃描方向圖在俯仰0°切面如圖12所示。
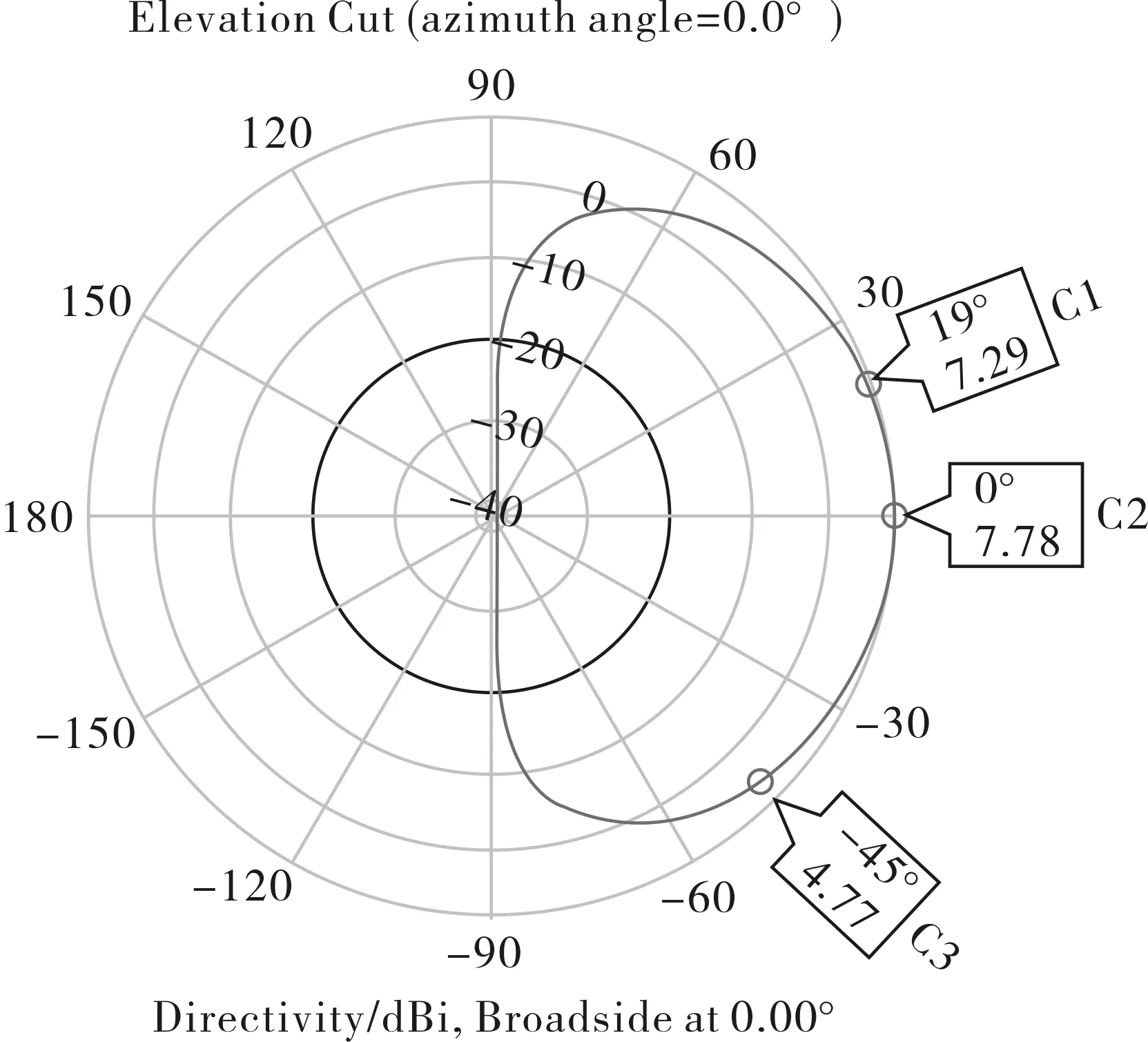
圖9 陣元方向圖
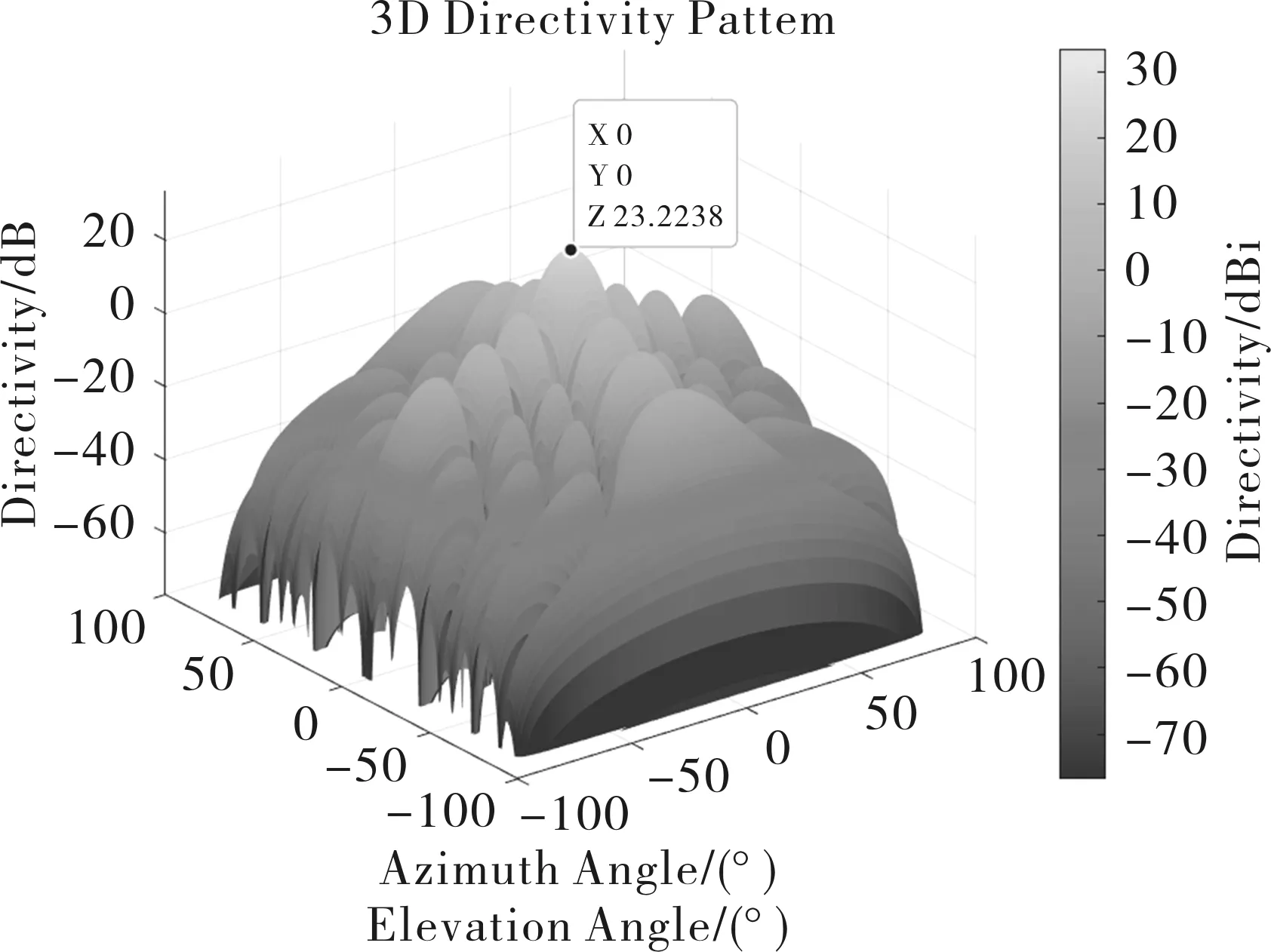
圖10 指向(0°,0°)方向圖
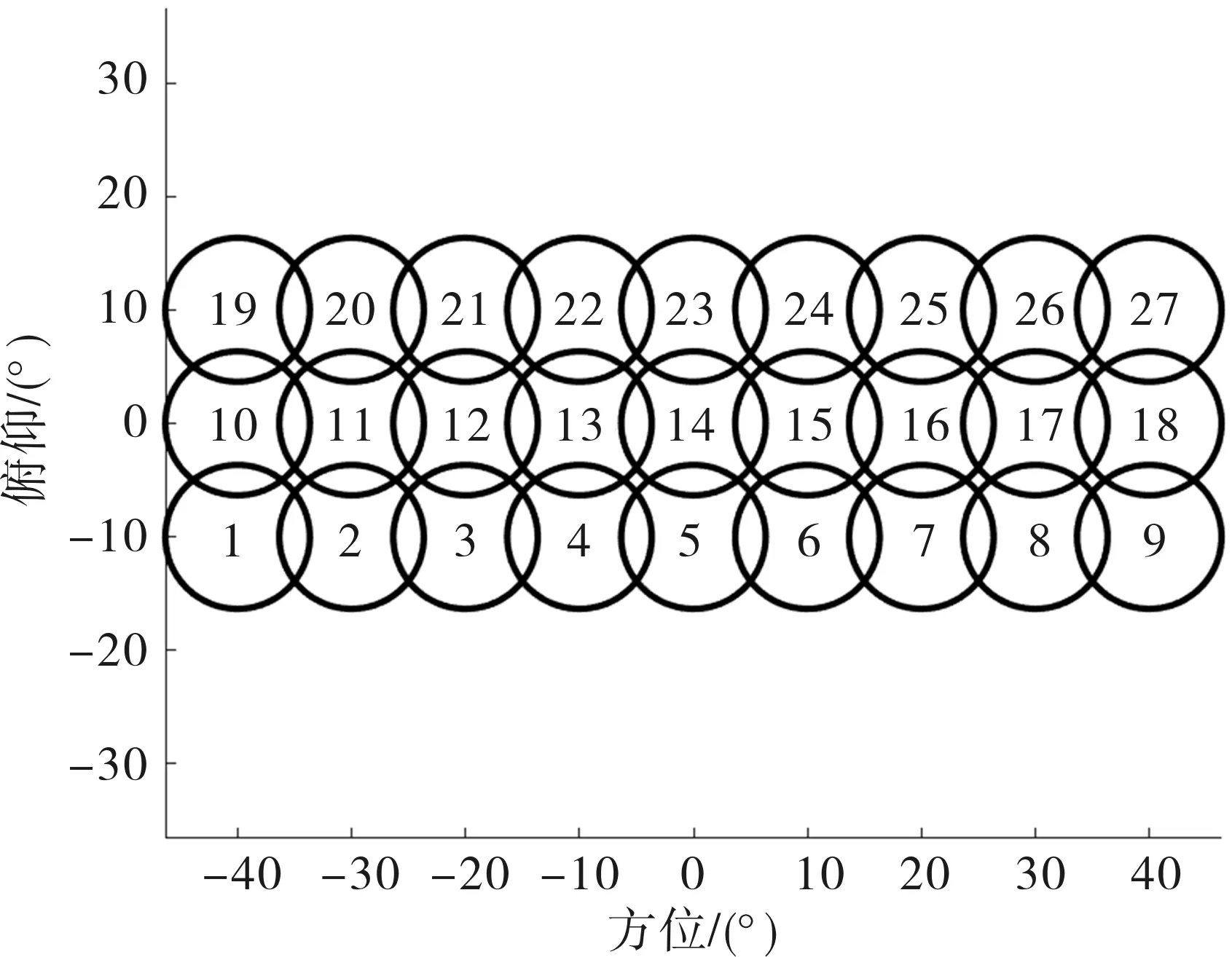
圖11 波位編排
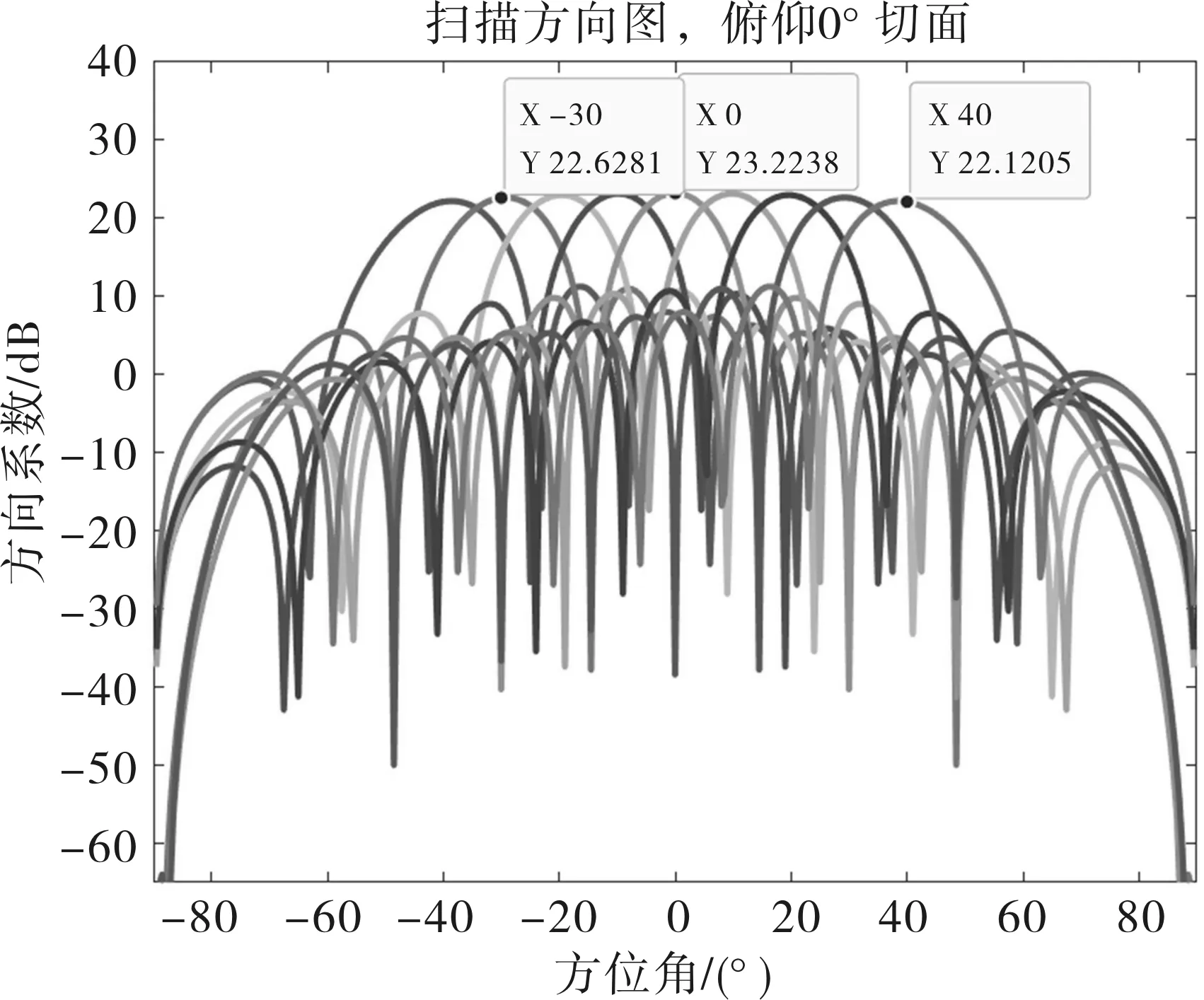
圖12 掃描方向圖
2.2 目標場模型
目標和雷達運動模型模塊中配置狀態方程,如式(9),勻速直線運動的目標狀態方程如式(10)所示。
X(k+1)=F(k)X(k)+Γ(k)v(k)
(9)
(10)

目標信息更新模塊輸出的為目標直角坐標,需要轉換為相對雷達的方位俯仰坐標,轉換公式為
(11)
其中(φ,θ)為目標相對雷達的方位俯仰坐標,R為目標相對雷達距離。
圖中發射模塊發射中頻線性調頻信號,發射信號形式如式(12)所示。
(12)
其中fc為信號中心頻率,Ts為采樣間隔,τ為脈沖寬度,T為脈沖重復間隔,B為信號帶寬,P為信號峰值功率,N為一個PRI信號點數。
陣列發射模塊根據設定天線模型和目標方位俯仰坐標計算雷達向目標輻射信號,如式(13)所示。
(13)
其中D(φ0,θ0;φ,θ)按式(8)計算。
目標相對雷達之間的角度、距離以及目標、雷達的運動速度傳入空間模塊,空間模塊根據這些信息對信號進行延遲、疊加多普勒頻移、乘上功率衰減系數,如式(14)[8]所示。

(14)
其中λ為信號波長,R為目標到雷達距離,v是目標相對雷達的速度。yTx(n-n0)為陣列發射模塊輸出,n0為信號延遲采樣點數。若要高逼真模擬回波采樣位置可使用分數延遲器。
空間模塊后的目標起伏模塊可設置目標Swerling類型,控制模塊輸出的RCS更新信號判斷是否更新目標RCS,其輸出如式(15)所示。
(15)
其中σ為目標RCS。
2.3 信號處理單元
信號處理處理單元包含數字下邊頻、數字波束形成、脈沖壓縮、MTI、MTD、恒虛警檢測、測角。數字下變頻將64陣元通道信號下變頻至零中頻,并降低信號采樣率,其原理如圖13所示,仿真系統用60MHz采樣率采樣140MHz中頻信號,所以NCO輸出頻率設為20MHz,本文中CIC抽取設為3,低通濾波后抽取率為2,總抽取率為6,DDC輸出信號采樣率為10MHz。發射信號帶寬為4MHz,FIR低通濾波器截止頻率可設置為2.5MHz。
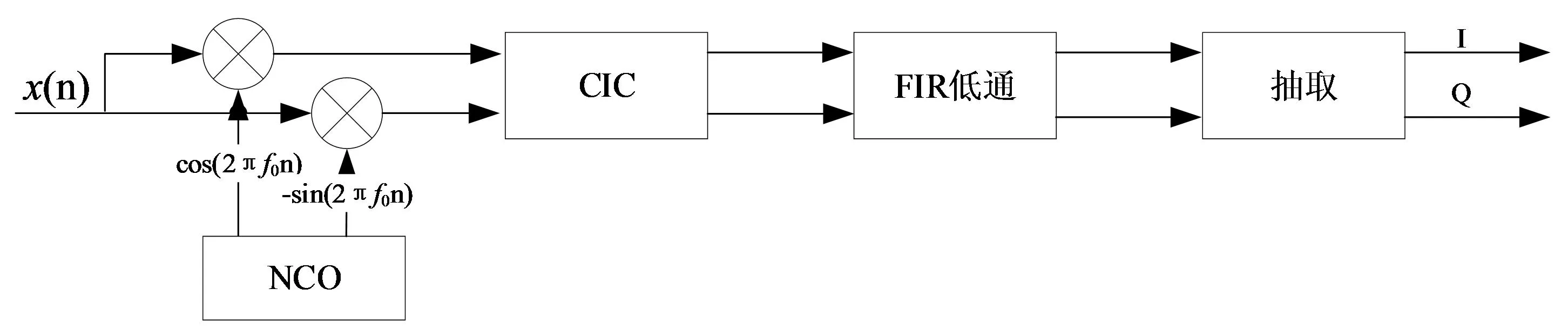
圖13 DDC原理圖
數字波束形成包含權值計算模塊和波束形成器,數字波束形成原理如式(16)所示。
yDBF=Xw*=SATw*+Nw*
(16)
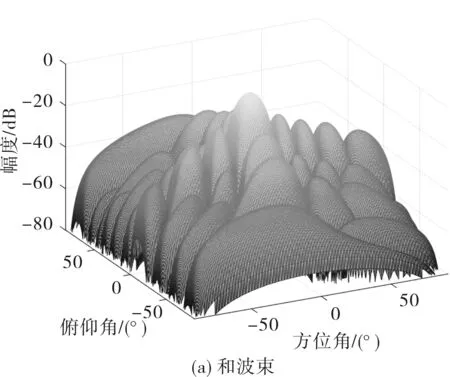
其中X為DDC輸出信號矢量模式。令陣面下半部分權值為和波束權值相反數得俯仰差波束權值,令陣面右半部分權值為和波束權值相反數得方位差波束權值,如圖14所示。在方位-10°,俯仰-10°形成的接收和波束,方位俯仰差波束功率方向圖如圖15所示 。
匹配濾波采用頻域方式,加泰勒窗降低副瓣,原理如圖16所示。通過Buffer模塊緩存一個CPI的脈沖壓縮數據后重排輸出至MTI、MTD,如圖17所示。MTD處理采用128點DFT,加切比雪夫窗降低副瓣。恒虛警檢測采用GO-CFAR,測角方式采用文獻[8]中的和差波束測角方法。
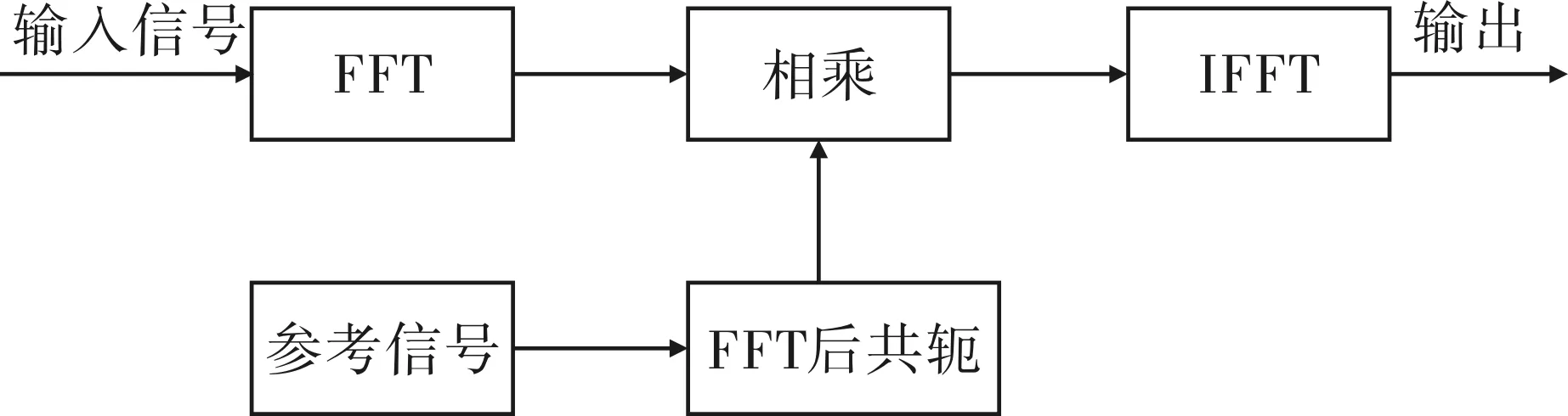
圖16 頻域匹配濾波原理
如圖18所示,為DDC和DBF、脈沖壓縮的仿真結果,共三個CPI數據,每個CPI 4個脈沖,CPI1~3波束指向分別為方位俯仰(-10°,0°)、(0°,0°)、(10°,0°),目標方位俯仰角為(0°,0°)。
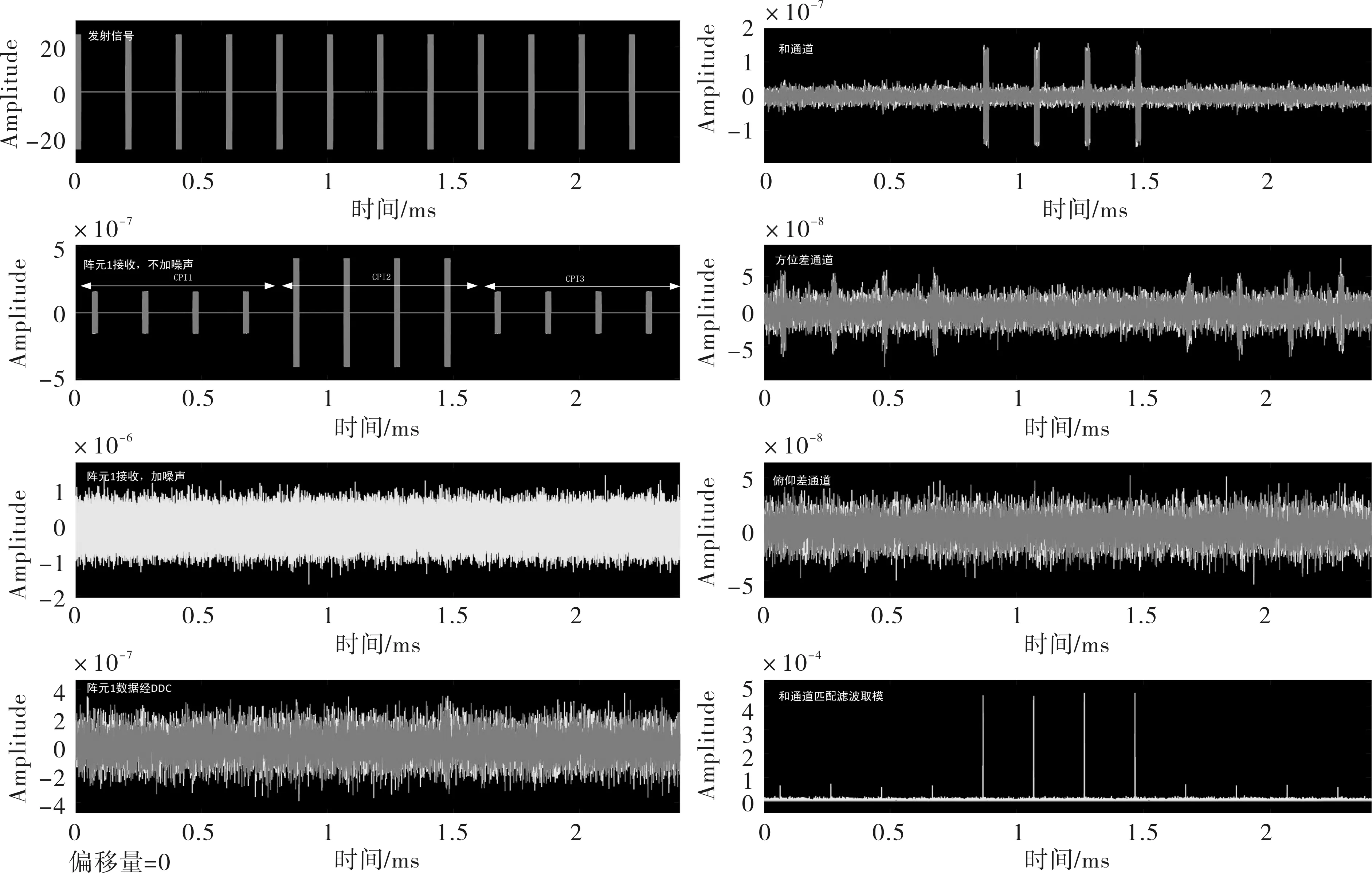
圖18 DDC、DBF、匹配濾波仿真結果
2.4 指標分析
該S波段雷達設計為能探測俯仰10°,距離雷達25km,RCS為5m2的目標,指標分析如下。
雷達方程如式為
(17)
其中Pt為發射信號峰值功率,Gt為發射增益,Gr為接收增益,λ為波長,σ為目標RCS,R為目標相對雷達距離。k為玻爾茲曼常數取1.380649×10-23J/K,B為接收機噪聲帶寬,Te為噪聲等效溫度取290K,F為噪聲系數取0,L為系統損失取7dB。
取雷達總虛警概率為10-6,發現概率為0.85,則單個脈沖信噪比需要12.78dB,相參積累16個脈沖,單個脈沖信噪比僅需3.6dB。波束指向方位0°,俯仰10°時天線發射增益(用方向系數代替)23.16dB,接收增益為14.6dB。發射峰值功率設為640W,接收機噪聲帶寬設60MHz,對于RCS為5m2,距離為25km,俯仰10°的目標,回波功率為-155.3dB,噪聲功率為-126.2dB,信噪比-29.1dB。根據仿真結果回波經過DDC、DBF、脈壓后信噪比提升約42dB,減去系統損失7dB,信噪比SNR為-29.1dB-7+42dB=5.9dB>3.6dB,滿足雷達指標要求。128點MTD的信噪比提高約10dB,則MTD后信噪比為15.9dB,由式(10)計算測角精度為1.62°。60MHz采樣的中頻回波經DDC降采樣后采樣率為10MHz,采樣間隔Ts為10μs,由式(19)得距離探測最大誤差為15m。
(18)

(19)
其中c為光速取3.0×108m/s。
脈沖PRI設置為200μs,最大不模糊距離為Rmax=PRI·c/2=30km>25km。最大探測速度為vmax=λ/(4×PRI)≈136m/s,測速誤差為λ/(4×PRI×N)=1.07m/s,λ為信號波長,N為MTD點數。
3 仿真實驗與分析
本節利用仿真系統分別在單目標和多目標的場景下進行仿真,仿真環境如表2所示。
仿真中雷達位于坐標原點(0,0,0),固定不動,仿真結果可存儲在本地,方便后期進行期數據分析和回放。
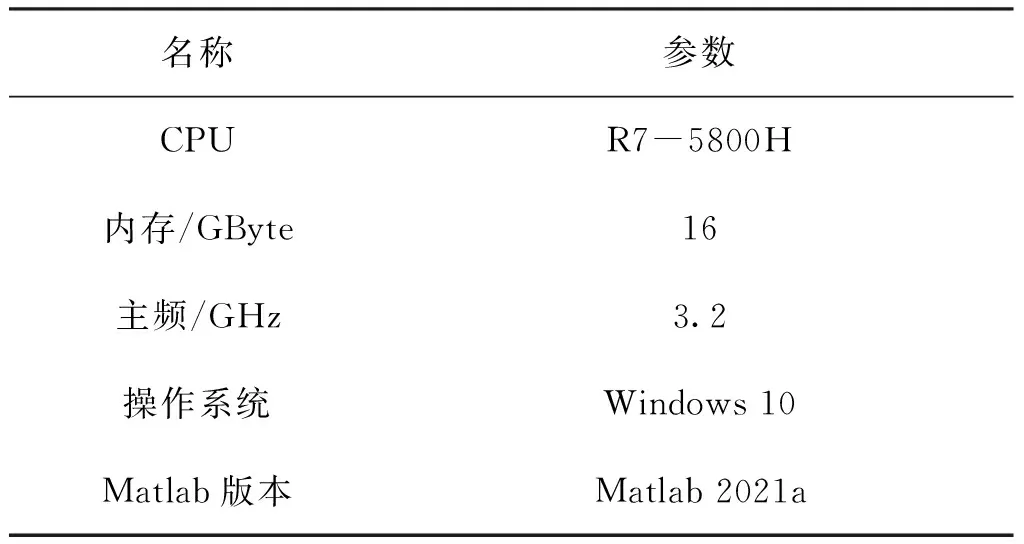
表2 仿真平臺參數表
3.1 靜止目標仿真
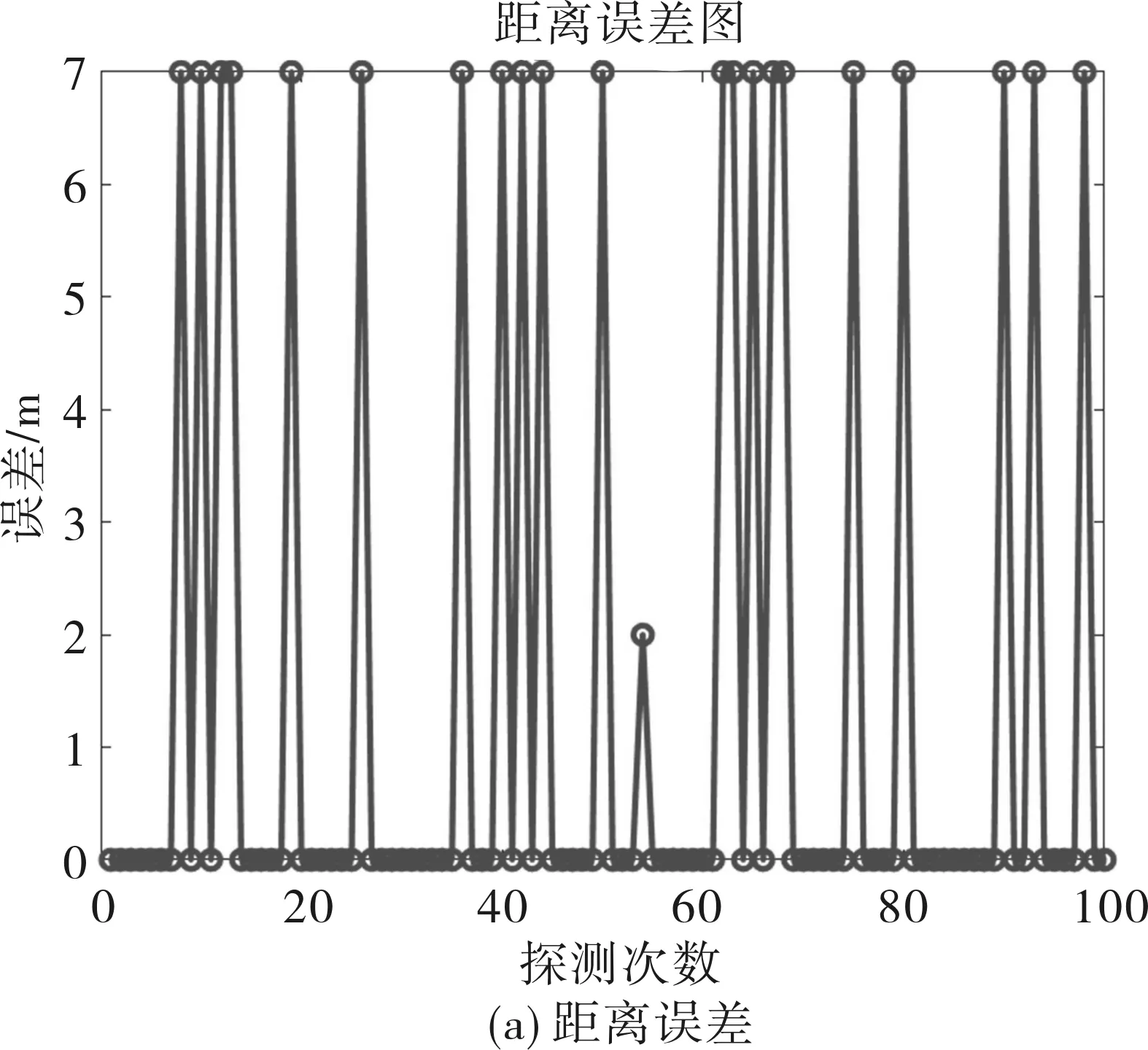
本次仿真一個靜止目標對比實際探測精度和理論探測精度,目標位與(15000,0,0)(m),為Swerling 0型目標,RCS為5m2,目標與雷達距離約15km,方位俯仰坐標為(0°,0°),波束指向角為方位0°,俯仰0°。半功率波束寬度為12.68°,探測目標100次,MTD后的平均SNR為37.2dB。由式(19)得距離探測最大15m。由噪聲引起的理論測角誤差均方根由式(18)計算為0.0888°,仿真結果誤差如圖19所示。由式(18)計算測角誤差均方根值(RMS),測距誤差RMS為3.21m,方位誤差RMS為0.1010°,俯仰誤差RMS為0.1077°。計算結果顯示,本系統的測距誤差在最大誤差范圍內,實際測角誤差與理論測角誤差相近。
(20)
3.2 單個運動目標仿真
本次仿真單個運動目標,目標初始位置 (10000,0,0)(m),初始速度為(47.4,-3.1,-1.9)(m/s),目標初始方位俯仰角為(0°,0°),波束初始指向為方位0°,俯仰0°,目標波位間更新間隔設為2s。目標類型為SwerlingI型, RCS均值為10m2。50次探測結果和目標真實信息對比如圖20所示,仿真系統顯控界面如圖21所示。由式(18)計算探測誤差均方根。根據計算,距離探測誤差RMS為3.59m,方位角探測誤差RMS為0.04°,俯仰角探測誤差RMS為0.05°,速度探測誤差RMS為0.40m/s<1.07m/s在誤差范圍內。
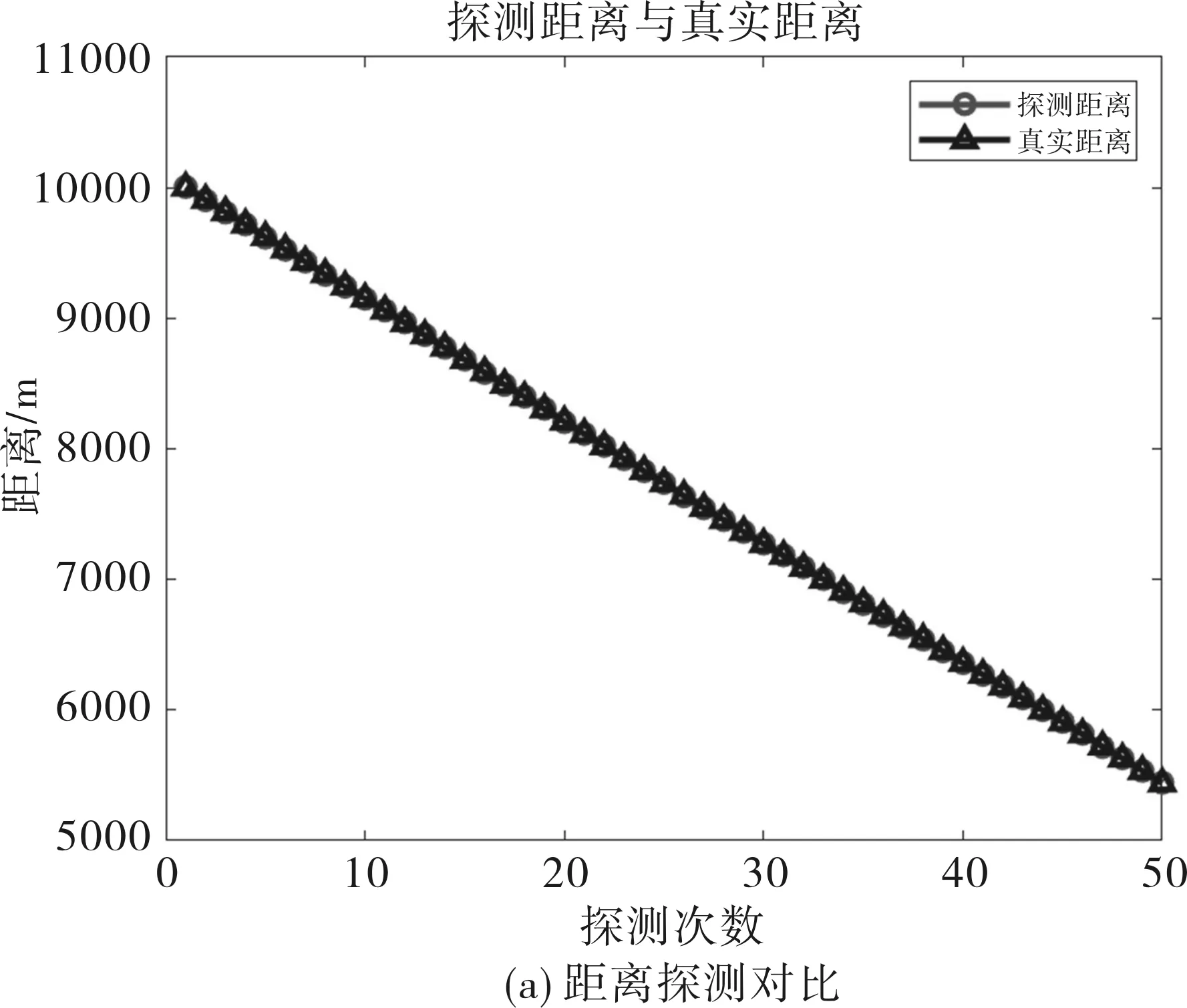
圖20 單目標仿真結果
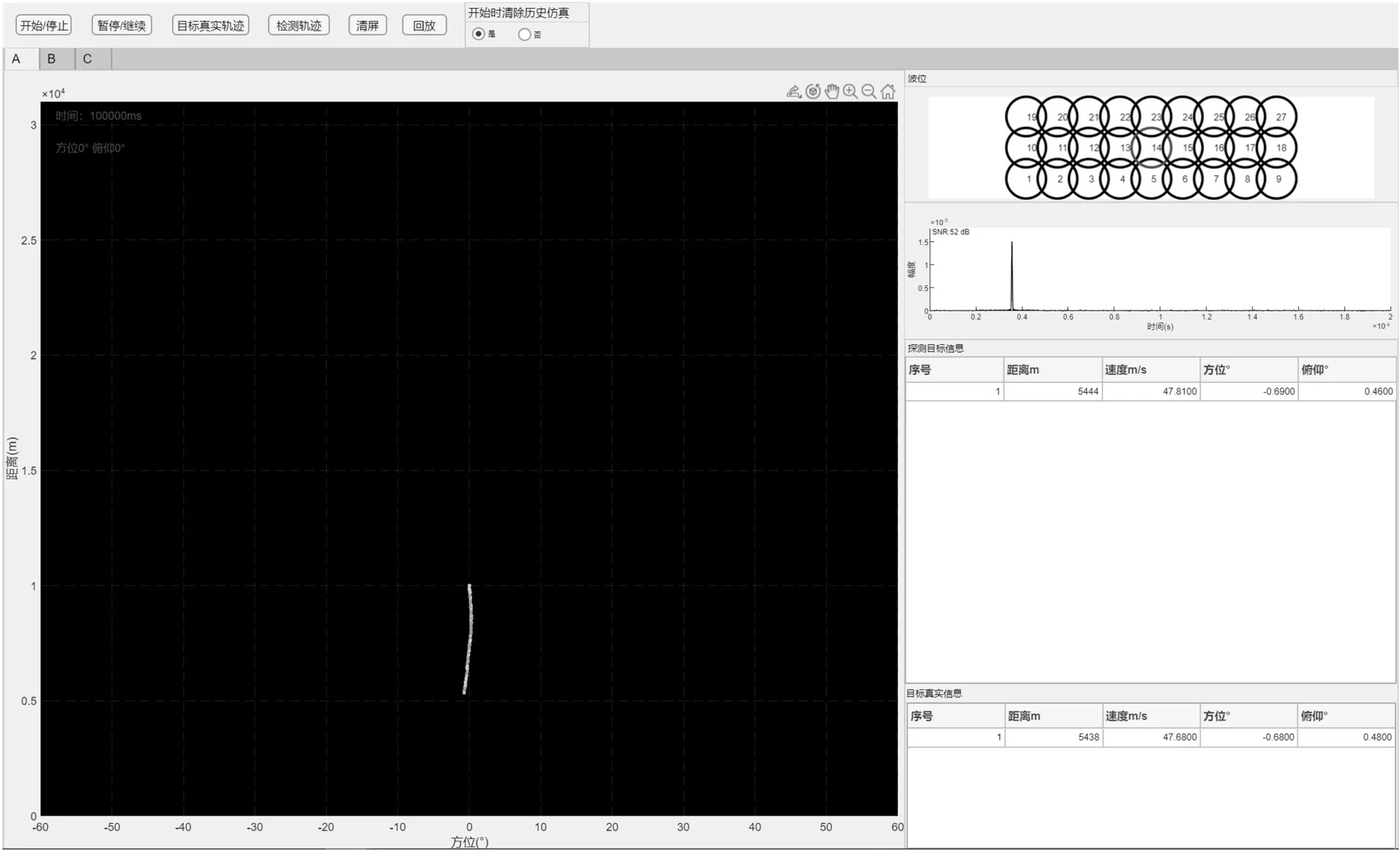
圖21 顯控界面
3.3 多目標仿真
本次仿真隨機生成三個目標的位置和速度信息,目標位置分別為(15000,0,0),(6577.8,-2394.1,0),(9698.5,5090.5,1710.1,-1736.5),初速度分別為(41.2,-3.3,-1.3),(-40.1,3.8,1.5),(-48.3,3.2,-1.3),均為SwerlingI型目標,RCS均值均為5m2,仿真結果如圖22所示。
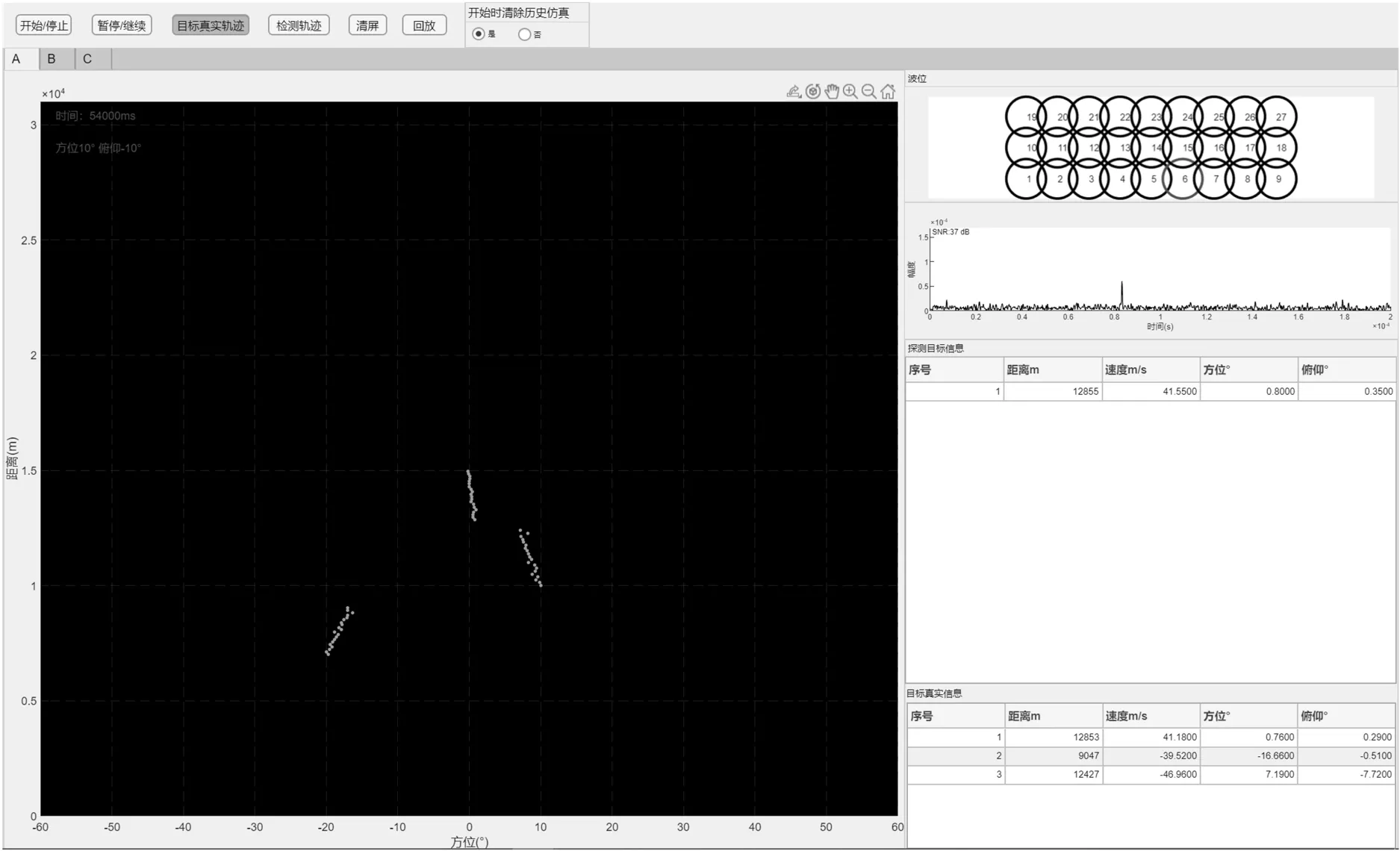
圖22 多目標仿真結果圖
4 結束語
本文基于Matlab/Simulink設計完成了一款中頻信號級數字陣列雷達仿真系統,介紹了仿真系統的工作流程,系統架構,并詳細描述了仿真系統的實現過程。根據實際仿真實驗結果,本系統仿真的雷達測距和測速誤差都在理論誤差范圍內,測角精度與理論精度近似,說明本系統能夠正確運行。在未來可通過添加功能組件的方式對仿真系統進行擴展,對雷達信號處理、數據處理、資源調度、抗干擾算法等進行仿真驗證。對于大型陣列雷達的仿真,將來可通過并行仿真和分布式仿真的方式提升仿真系統的運行速度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25