航空發(fā)動機高壓轉子裝配偏心預測和相位優(yōu)化的智能算法應用研究
2021-02-22 01:46:38張子豪郭俊康洪軍孫巖輝
西安交通大學學報 2021年2期
張子豪,郭俊康,洪軍,孫巖輝
(1.西安交通大學機械工程學院,710049,西安;2.西安交通大學現(xiàn)代設計及轉子軸承系統(tǒng)教育部重點實驗室,710049,西安;3.長安大學工程機械學院,710064,西安)
航空發(fā)動機是一種高度復雜和精密的熱力機械,由機械制造各零部件裝配而成,其中轉子組裝是整個裝配的核心環(huán)節(jié)。轉子系統(tǒng)轉速極高,承受巨大的啟動負載以及熱沖擊,而且伴隨大量的、復雜的動態(tài)機械載荷作用[1-2]。如果轉子系統(tǒng)裝配方案設計不合理、裝配偏心量過大,整機會產(chǎn)生巨大振動,直接影響發(fā)動機服役性能。
高壓轉子設計為多級組合轉子,為減少轉子中裝配偏心誤差,減少裝配現(xiàn)場的試裝、調(diào)試等工作,提高工作效率。其中Hussain通過齊次矩陣變換方法,建立了航空發(fā)動機轉子連接裝配分析模型[3-4],基于該模型預測裝配偏心和優(yōu)化零件的裝配相位,以提高整體裝配的幾何同軸度;文獻[5]基于矢量投影方法,提出了一種堆疊裝配方法和一種調(diào)整方法,旨在準確預測裝配偏心;金隼通過雅克比旋量模型建立了航空發(fā)動機轉子誤差傳遞分析[6-7],以多級盤裝配同軸度綜合誤差最小為目標,優(yōu)化了裝配角度,并且進一步改進模型,考慮止口處的部分并聯(lián)結構,提高偏心預測準確度。單福平等建立了包含尺寸和形位公差的剛性裝配模型[8-9],以蒙特卡洛仿真方法預測航空發(fā)動機的裝配精度,對零件安裝角度進行了優(yōu)化。
以上方法均是基于剛體假設完成的偏心計算和相位優(yōu)化,本質(zhì)是不考慮配合面的形貌特征,忽略裝配過程中的受力變形現(xiàn)象。但是,零件在加工制造中必然存在加工誤差,裝配變形也是不可避免的。為了提高裝配偏心預測精度以及計算效率,本文希望以智能算法為核心,提出一種新方法來解決以上問題。
在智能算法應用方面,Prabhaharan提出了基于遺傳算法的最優(yōu)化公差分配算法[10],劉海博等通過粒子群算法建立了公差優(yōu)化模型[11],王巍等結合了BP神經(jīng)網(wǎng)絡法與評價函數(shù)法[12],劉超等將粒子群工具箱作為并行公差優(yōu)化設計模型的求解工具,進行并行工序公差優(yōu)化設計[13],Ming等采用人工智能算法進行公差分析[14],張銘鑫等提出了一種集模糊模擬、神經(jīng)網(wǎng)絡和遺傳算法相結合的混合智能算法,以求解再制造裝配車間調(diào)度問題[15]。
受上述工程問題及相關研究啟發(fā),本文通過構建人工神經(jīng)網(wǎng)絡模型進行裝配偏心預測,再通過粒子群算法進行裝配相位的優(yōu)化。由于神經(jīng)網(wǎng)絡訓練需要大量數(shù)據(jù),而實驗數(shù)據(jù)很少,故本文通過傅里葉級數(shù)和有限元法生成大量網(wǎng)絡所需的訓練數(shù)據(jù),在偏心預測準確的條件下,通過粒子群算法進行相位優(yōu)化,得出最后裝配過程。
1 幾何誤差表達和數(shù)據(jù)生成
1.1 基于傅里葉級數(shù)的幾何誤差分解
首先用高精度綜合測量機IMAP4,通過AccuScanTMXE400 m-RT系統(tǒng)采集穩(wěn)定可靠的測量數(shù)據(jù),測量過程如圖1所示,得到3 600個端向跳動誤差數(shù)據(jù)和徑向跳動誤差數(shù)據(jù),如圖2和圖3所示。

圖1 測量轉子配合面
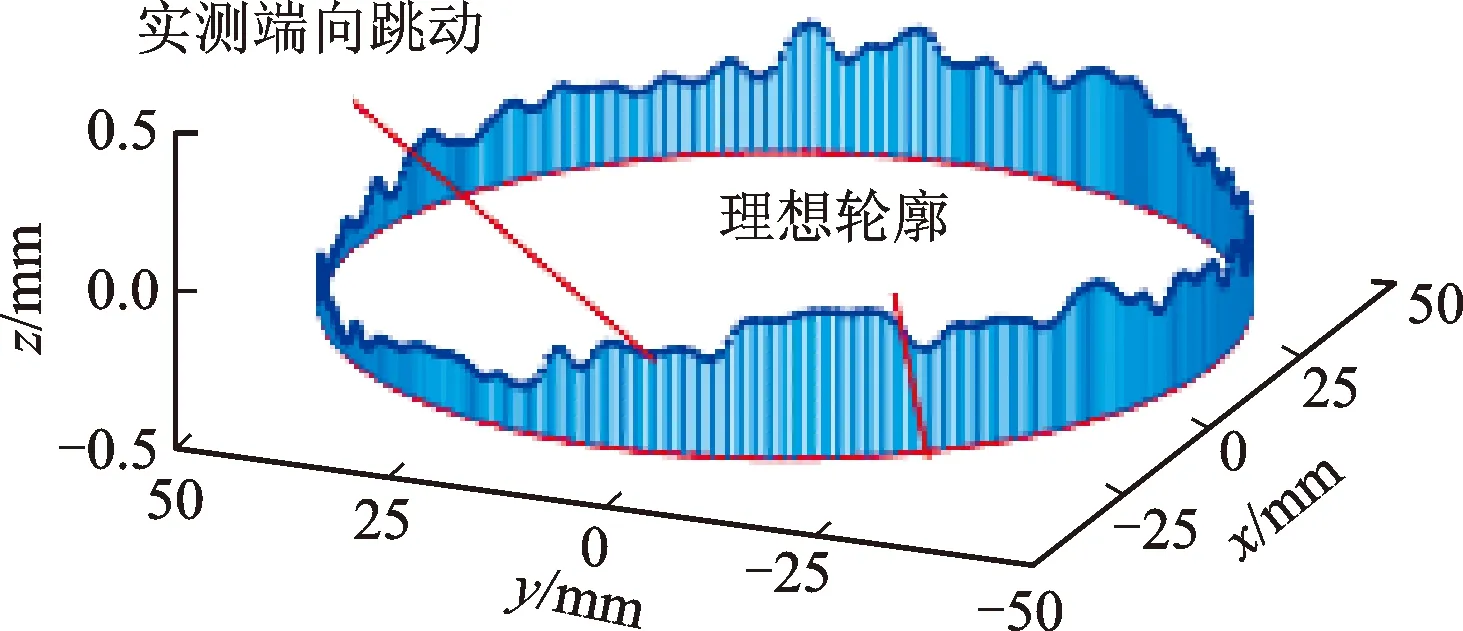
圖2 端向跳動誤差輪廓[16]
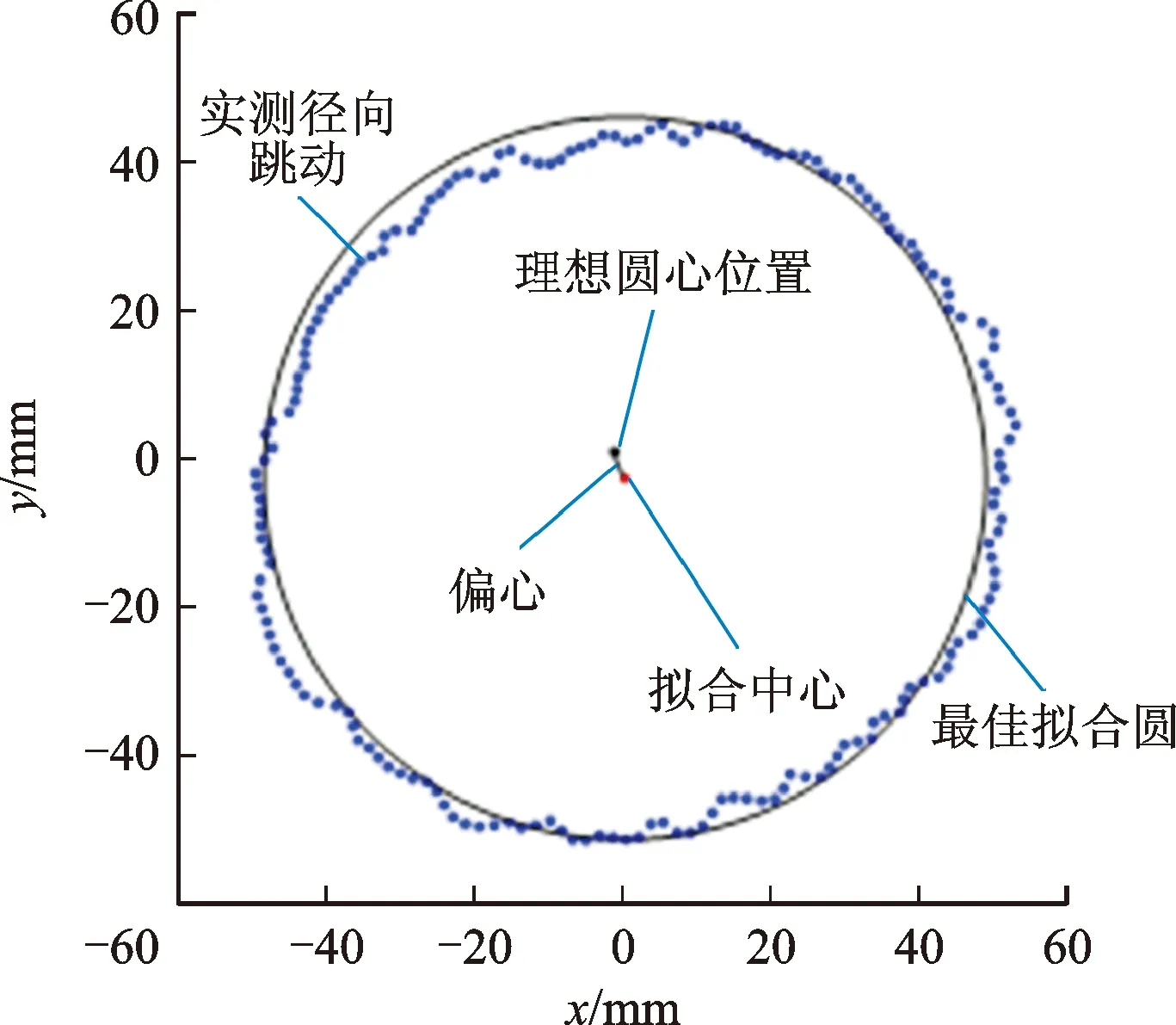
圖3 徑向跳動誤差輪廓[16]
使用傅里葉級數(shù)生成模擬隨機誤差[16],er和ea分別表示徑向輪廓軌跡的傅里葉級數(shù)和端向跳動輪廓的傅里葉級數(shù)表達式。er表達式如下
(1)
式中:akr為徑向跳動輪廓傅里葉級數(shù)的幅值;kr為徑向跳動輪廓傅里葉級數(shù)的頻率;ykr為徑向跳動輪廓傅里葉級數(shù)的相位。
ea表達式如下
(2)
式中:aka為端向跳動輪廓傅里葉級數(shù)的幅值;ka為端向跳動輪廓傅里葉級數(shù)的頻率;yka為端向跳動輪廓傅里葉級數(shù)的相位。
通過傅里葉變換,徑向跳動輪廓誤差數(shù)據(jù)和端向跳動輪廓誤差數(shù)據(jù)主要集中在前30階傅里葉級數(shù)和的形式,如圖4和圖5所示,因此n取30較為合適[16]。

圖4 端向誤差數(shù)據(jù)的FFT圖
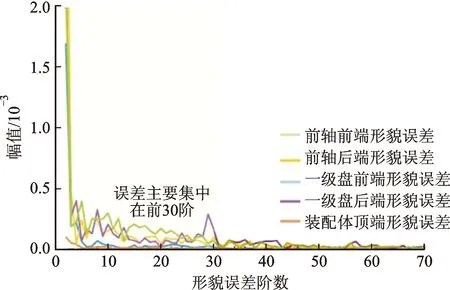
圖5 徑向誤差數(shù)據(jù)的FFT圖
1.2 生成誤差數(shù)據(jù)
由傅里葉變換可知,一階傅里葉級數(shù)的幅值在[-0.001,-0.002 2]和[0.001,0.002 2]之間,其余階數(shù)的幅值在[-0.000 2,0.000 2]之間。所有階數(shù)的相位均在[0,2π]之間,通過Python中random模塊,隨機在這些區(qū)間生成相應的幅值相位,最終由式(1)和式(2)分別生成200組徑向跳動誤差數(shù)據(jù)和端向跳動誤差數(shù)據(jù)。將徑向跳動誤差數(shù)據(jù)和端向跳動誤差數(shù)據(jù)分別通過施加多個接觸對的方式添加到有限元軟件建立的模型中,即將徑向和端向接觸對中接觸面偏移賦值為實測微小誤差數(shù)據(jù)。有限元模型底面固定,使用集中力模擬螺栓預緊力,在力的作用下對有限元模型進行計算,將頂面計算結果運用最小二乘擬合得到偏心,以此作為神經(jīng)網(wǎng)絡的輸出。計算結果如圖6所示,本文只給出轉子其中兩個零件裝配有限元計算結果,其他裝配零件同理。

圖6 有限元計算結果
2 神經(jīng)網(wǎng)絡模型預測裝配偏心
由于不同航空發(fā)動機轉子配合面的形貌特征不同,故裝配以后對應的裝配偏心也不同,兩者之間必然存在復雜的非線性映射關系,因此本文通過神經(jīng)網(wǎng)絡模型來計算航空發(fā)動機轉子裝配偏心。
2.1 BP神經(jīng)網(wǎng)絡模型
BP神經(jīng)網(wǎng)絡能夠處理多維結構數(shù)據(jù),采用非線性連續(xù)函數(shù)作為神經(jīng)元節(jié)點的激活函數(shù),可以使整個邊界線變成連續(xù)光滑的曲線,且對輸入和輸出具有優(yōu)秀的非線性映射能力。通過BP神經(jīng)網(wǎng)絡,可以擬合航空發(fā)動機轉子零件止口處輪廓的形貌誤差和轉子零件裝配偏心之間的非線性關系。
本文搭建了兩個BP神經(jīng)網(wǎng)絡,分別進行航空發(fā)動機轉子零件裝配偏心量(r)和偏心角(θ)預測。網(wǎng)絡具有3層結構,由輸入層、隱含層和輸出層組成,如圖7所示。輸入層對應航空發(fā)動機轉子零件止口配合面輪廓形貌誤差的特征向量,即由前30階傅里葉級數(shù)的各個階數(shù)的幅值和相位構成,輸出層對應航空發(fā)動機轉子零件止口頂端的裝配偏心量和偏心角。

圖7 BP神經(jīng)網(wǎng)絡結構
不同零件裝配時,輸入、輸出分別都是特征向量和裝配偏心,只是特征向量和裝配偏心的具體數(shù)值不一樣,故不同的兩個裝配零件只影響神經(jīng)網(wǎng)絡的具體參數(shù)。因此,本文以前軸和一級盤零件裝配為例,詳細說明神經(jīng)網(wǎng)絡預測的準確性,其他零件的神經(jīng)網(wǎng)絡訓練也使用200組訓練數(shù)據(jù),這里不再贅述。
模型采用梯度下降優(yōu)化算法,公式為
(3)
神經(jīng)網(wǎng)絡隱含層使用sigmoid函數(shù)作為激活函數(shù),表達式為
(4)
采用均方誤差為損失函數(shù)[17],表達式為
(5)
式中:y分別代表兩個神經(jīng)網(wǎng)絡理論計算出的裝配偏心量和偏心角;y′分別代表兩個網(wǎng)絡實際計算出的裝配偏心量和偏心角。兩個神經(jīng)網(wǎng)絡的輸出都只有一個值,故i=1。
本文的隱含層節(jié)點數(shù)為2,為了提高訓練集收斂效率使用衰減學習率,即最初學習率為0.01,學習率衰減率為0.999。最大訓練次數(shù)分別為200 000和50 000,每次喂入神經(jīng)網(wǎng)絡的個數(shù)均為50個。為了防止出現(xiàn)過擬合,網(wǎng)絡中加入了L2[18]正則化方法,計算公式如下
(6)
此外還使用滑動平均算法,使航空發(fā)動機轉子裝配偏心計算結果精準度更穩(wěn)定。
2.2 神經(jīng)網(wǎng)絡訓練集
本文通過傅里葉級數(shù),生成200組轉子形貌誤差數(shù)據(jù)作為神經(jīng)網(wǎng)絡的輸入,采用有限元方法對這200組數(shù)據(jù)做上標簽(即有限元模型計算出偏心量和偏心角結果),作為網(wǎng)絡的輸出,從而進行神經(jīng)網(wǎng)絡訓練,訓練流程如圖8所示。
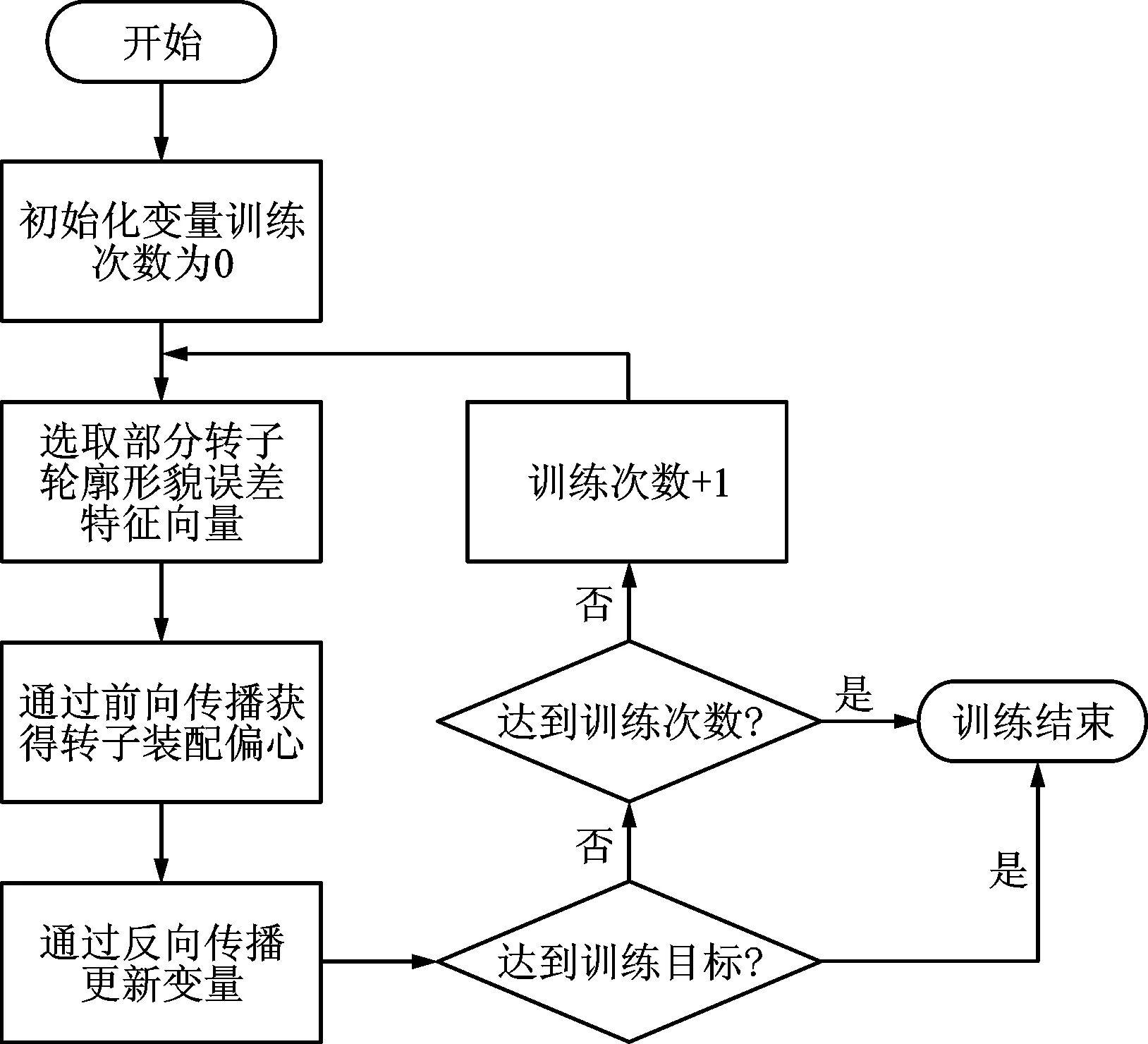
圖8 神經(jīng)網(wǎng)絡訓練流程圖
以傅里葉級數(shù)各階幅值、相位的參數(shù)(即表示航空發(fā)動機轉子零件配合面形貌誤差)作為神經(jīng)網(wǎng)絡輸入的特征向量P(a11,b11,…,a1m,b1m)T,轉子裝配偏心為網(wǎng)絡輸出,最終分別在迭代200 000和50 000次之后,損失函數(shù)誤差分別約為1.274 41×10-6mm和0.23°。訓練時間分別為約5 min和2 min。
2.3 神經(jīng)網(wǎng)絡偏心預測結果
在航空發(fā)動機裝配偏心預測神經(jīng)網(wǎng)絡模型參數(shù)訓練完成之后,通過對新生成的3組模擬轉子輪廓形貌誤差進行偏心預測,以驗證方法的有效性。神經(jīng)網(wǎng)絡模型對有限元方法生成的數(shù)據(jù)進行網(wǎng)絡訓練,故測試結果也應該和有限元仿真進行對比,結果如表1和表2所示。測試集計算時間約為10 s。
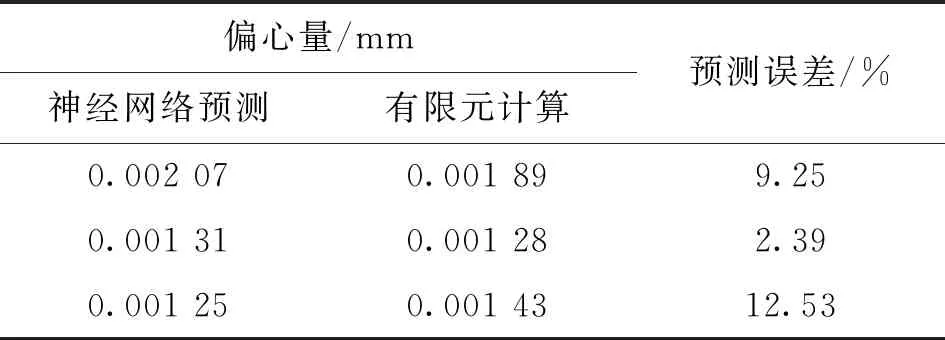
表1 神經(jīng)網(wǎng)絡預測裝配偏心量

表2 神經(jīng)網(wǎng)絡預測裝配偏心角
3 基于粒子群算法的相位優(yōu)化過程
針對航空發(fā)動機轉子零件裝配相位可調(diào)的情況,分析不同裝配相位對產(chǎn)品裝配誤差的影響,實現(xiàn)零部件裝配相位的優(yōu)化。
3.1 組合轉子誤差傳遞模型
以航空發(fā)動機轉子每個零件的截面中心為原點,法向量為z軸,建立坐標系,如圖9所示。該坐標系在測量坐標系中的齊次坐標矩陣描述即可表示轉子零件測量面在測量坐標系中的方位[19-20]。
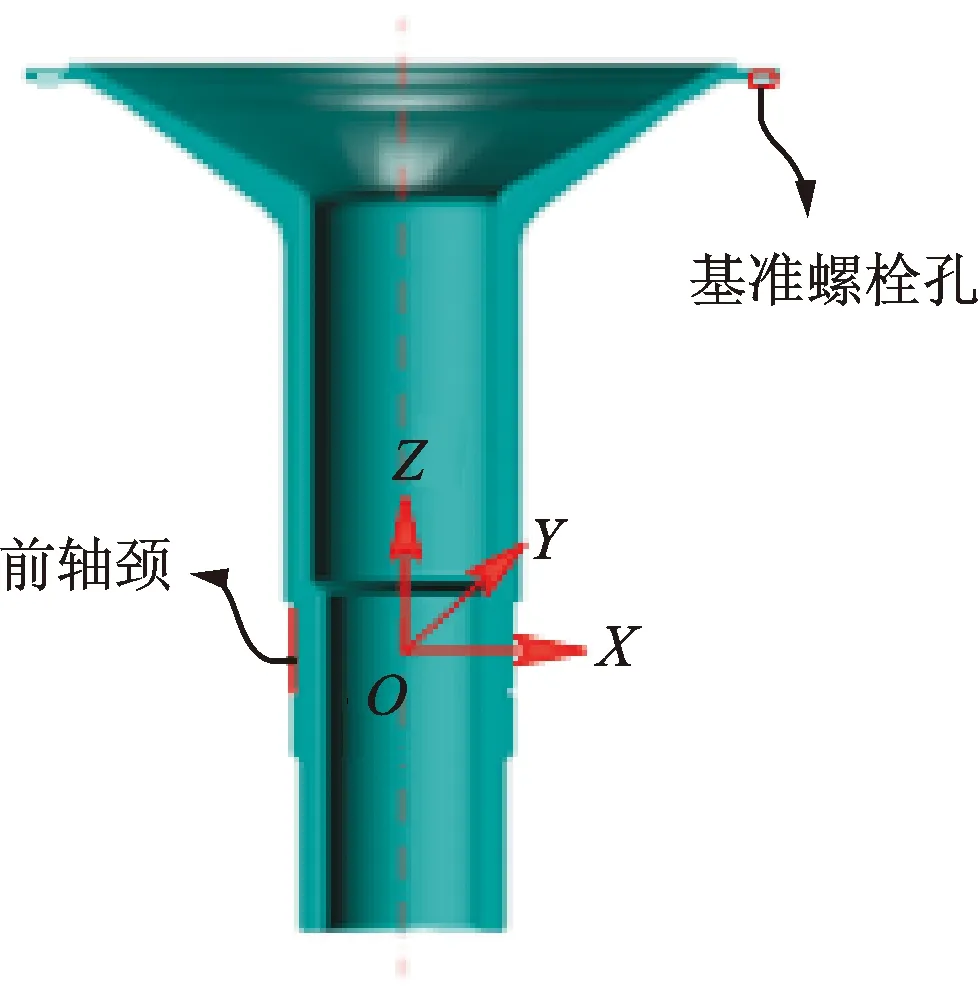
圖9 建立的零件坐標系
此時航空發(fā)動機轉子零件的齊次坐標矩陣表達式為
(7)
式中:xc和yc分別為轉子零件截面中心的x、y坐標;h為截面高度;α和β分別為繞x、y軸的轉角值。
通過對航空發(fā)動機轉子的每個零件建立位姿矩陣,即分別表示測量坐標系中轉子零件上若干特征面的空間位姿——零件各特征之間的關系,如圖10所示,表示一個轉子零件通過位姿變換得到止口頂端相對于底端的偏心。
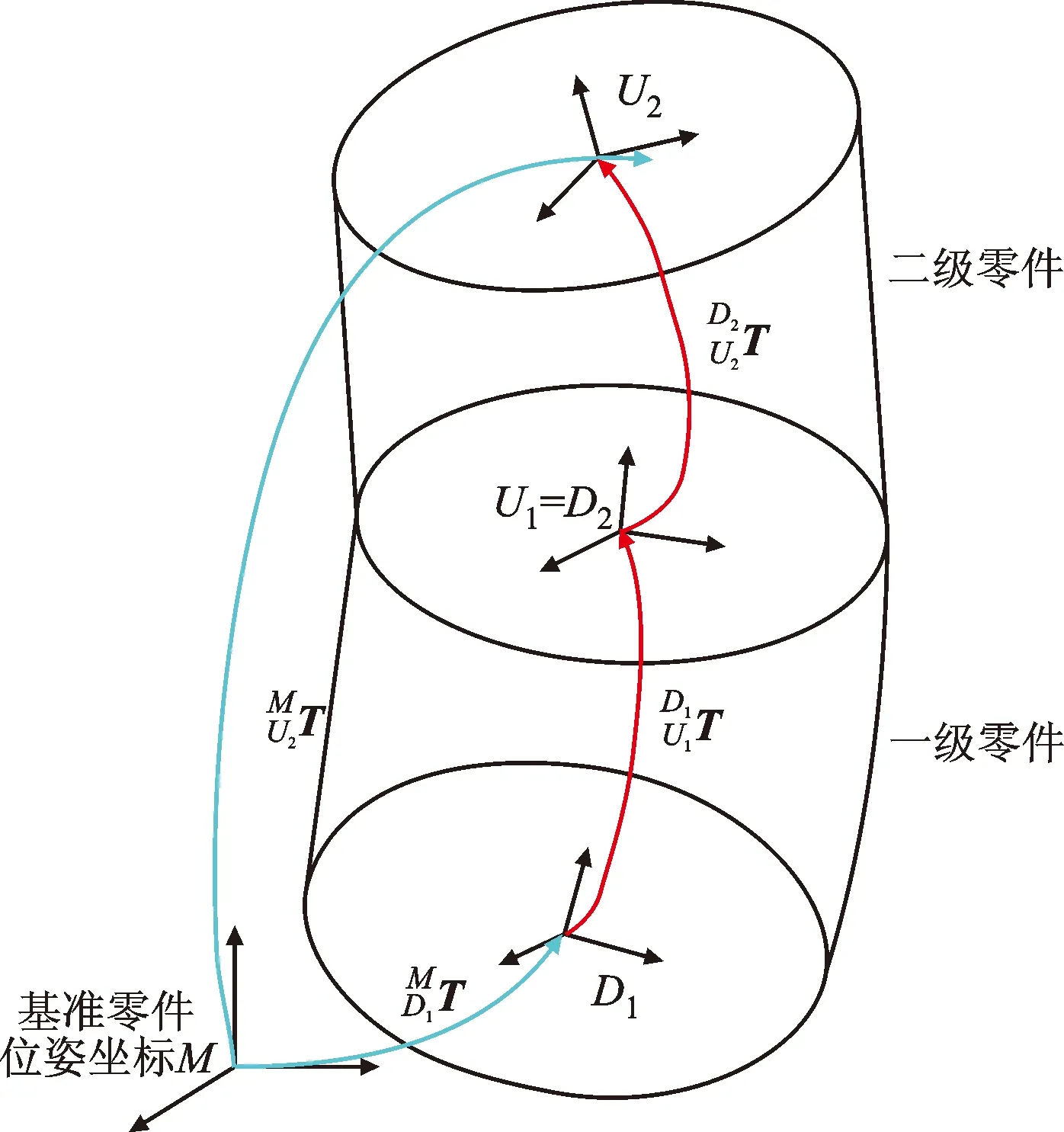
圖10 誤差傳遞模型圖
當一個零件堆疊時,通過齊次坐標變換理論可知
(8)
當兩個零件堆疊時,一級零件頂面圓心和二級零件底面圓心重合,二級零件頂面相對于前軸基準下的位姿為
(9)
多個零件裝配時,有
(10)
最終可以提取每一級零件的偏心量r。
3.2 組合轉子相位優(yōu)化
大型轉子常會設計為多級零件組合的形式,各級零件通過止口連接起來,最終形成一個完整的轉子。航空發(fā)動機高壓轉子是典型的組合轉子,為了獲得優(yōu)良的服役性能,裝配精度和初始不平衡量要求極為嚴苛。
在組合轉子裝配過程中,螺栓孔通常是周向均布的,零件會有多個可選的裝配相位。為了使轉子整體的同心度達到最優(yōu),需要為每個零件在若干個不同裝配相位中進行優(yōu)選,將各級盤零件依次裝配在一起,最終形成符合精度要求的組合轉子。轉子裝配精度要求是整體的同心度,并非只關注前后兩端的同軸度,并且所有零件偏心量之和應小于0.180 mm和每一級單個偏心小于0.060 mm,因此需要對每級零件的同心度都要進行分析研究。這個問題需要使用前面的裝配偏心預測模型求解,得到所有零件止口的中心坐標值,進而計算整體的同心度,評價整體的裝配質(zhì)量。為了對各零件的偏心量進行評估,需要先確定一條基準軸線,為此止口幾何中心到軸線的距離就是該面的偏心量。本文選擇以最小二乘法擬合各中心點得到的公共軸線為基準,評估各零件的偏心量,可以保證裝配質(zhì)量,具體如圖11所示。
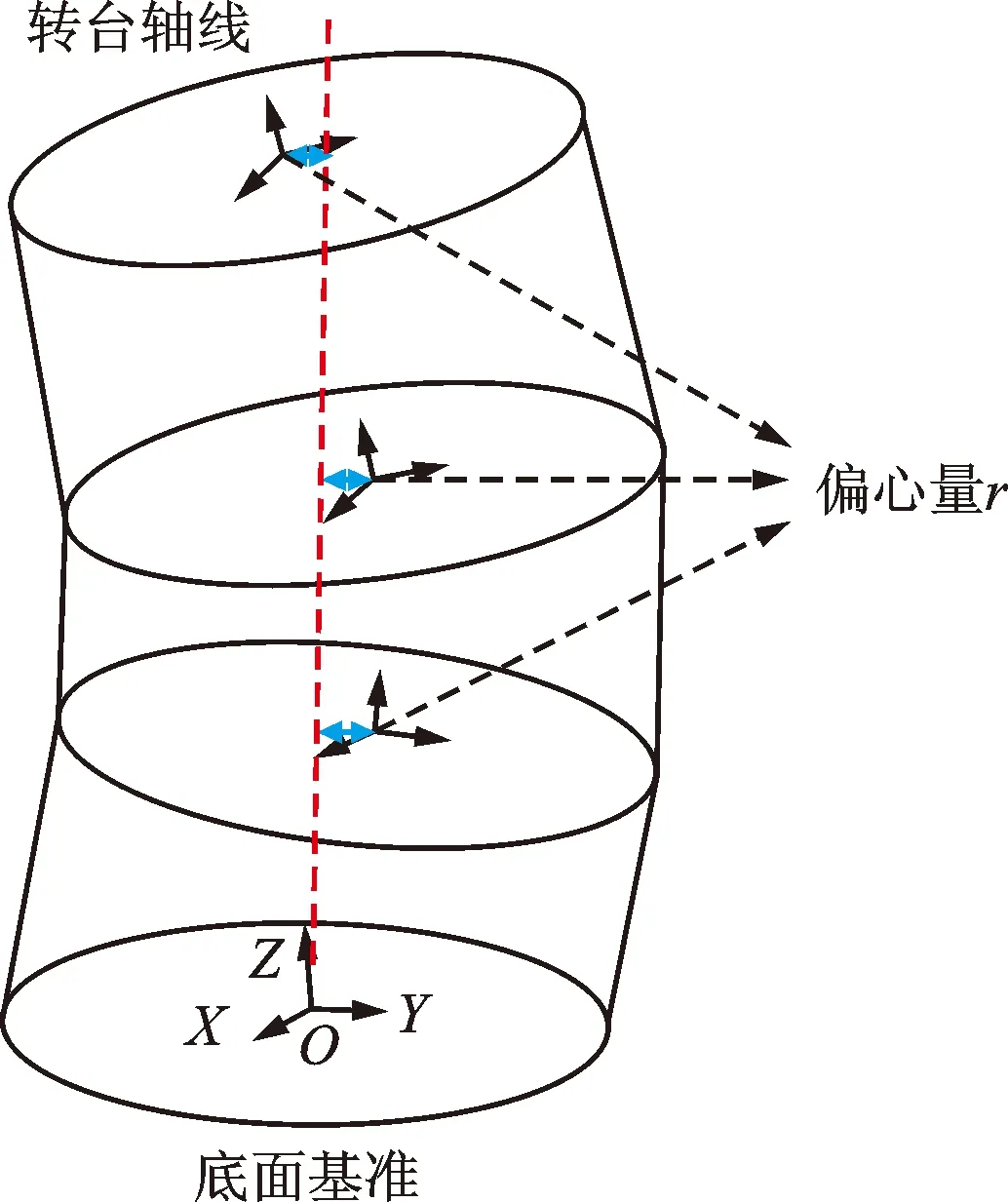
圖11 零件裝配偏心示意圖
在每級盤偏心量都小于公差值的基礎上,以各級零件偏心量之和最小作為適應度函數(shù),進行各級盤裝配角度的優(yōu)化。對該優(yōu)化問題建模如下
(11)
式中:n為零件數(shù)量;Tr為轉子裝配偏心量公差,為同心度公差的一半;r為零件偏心量。
如圖12所示,模擬航空發(fā)動機轉子共由6個零件組成,分別為前軸、壓氣機一級盤、壓氣機二級盤、壓氣機三級盤、渦輪盤和后軸。

圖12 高壓轉子模擬件結構
為減輕重量,零件均為中空的薄壁結構,同時為了增加零件強度,一些零件中存在加強肋板,為了減少其他因素的影響,各零件上未設置葉片插槽等細節(jié)結構。各個零件的關鍵尺寸以及可調(diào)整相位個數(shù)如表3所示。6個零件對應的各公差值均一致,如表4所示。

表3 模擬轉子各零件關鍵尺寸及可調(diào)整相位個數(shù)
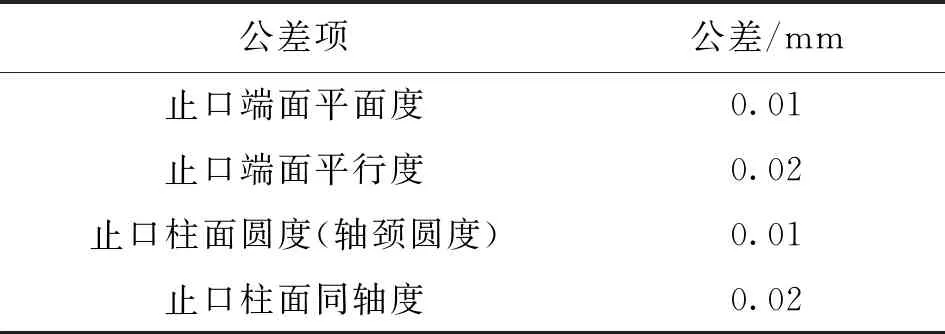
表4 模擬轉子各零件主要公差
3.3 粒子群算法求解
不同航空發(fā)動機轉子零件裝配時的裝配角度可以調(diào)整,而且對一個零件來說,不同的相位之間不能共存,只能選擇其中之一。當可選裝配相位的數(shù)目很多時,使用遍歷算法計算時間會非常長、效率極低。這種情況下,智能算法就成為轉子裝配相位選擇優(yōu)化問題的首選,旨在提高計算效率,得到近似全局最優(yōu)的解。
粒子群算法有著實現(xiàn)方便、收斂速度快、參數(shù)設置少的特點,很適合進行航空發(fā)動機轉子裝配相位優(yōu)化選擇。因此,本文選用粒子群算法進行相位優(yōu)化,旨在得到一組最優(yōu)的裝配相位組合。粒子群算法流程如圖13所示,其中vid、kid為優(yōu)化粒子群速度、位置,c1、c2為學習因子,r1、r2為[0,1]內(nèi)的隨機數(shù)。

圖13 粒子群算法流程圖
由前30階傅里葉級數(shù)生成轉子配合面輪廓形貌誤差,通過神經(jīng)網(wǎng)絡偏心預測模型,分別得到航空發(fā)動機轉子不同相位下的裝配偏心,再應用粒子群算法對裝配相位進行優(yōu)化,得到優(yōu)化后的裝配相位。
由于航空發(fā)動機轉子裝配相位的固定性,而粒子群算法進行優(yōu)化時方向可能是任意的,即優(yōu)化后可能不是所應裝配相位位置,故選擇與所應裝配相位最近的位置(兩個偏心點的歐氏距離最近)為最優(yōu)裝配相位。粒子群算法參數(shù)設置:學習因子1c1=1.5,學習因子2c2=2.5,慣性權重w=0.5,初始化群體個體數(shù)目N=50,最大迭代次數(shù)M=1,搜索空間維度(即未知數(shù)個數(shù))D=5。
采用MATLAB軟件進行粒子群算法求解,最終優(yōu)化結果為前軸和壓氣機一級盤第28個螺孔、壓氣機一級盤和壓二級盤第18個螺孔、壓氣機二級盤和三級盤第24個螺孔、壓氣機三級盤和高壓渦輪盤第1個螺孔和后軸第6個螺孔對齊,如此裝配完成后轉子總偏心量為0.165 73 mm,具體優(yōu)化結果比較如表5所示。

表5 粒子群算法相位優(yōu)化結果
4 結 論
本文建立了人工神經(jīng)網(wǎng)絡偏心預測模型,用于計算轉子不同零件裝配的偏心量,針對兩個相同零件有不同相位組合的情況,設計粒子群算法,從這個過程可得出如下結論。
(1)轉子零件止口處的加工形貌誤差主要集中在前30階傅里葉級數(shù)和的形式,且一階傅里葉級數(shù)的幅值在[-0.001,-0.002 2]和[0.001,0.002 2]之間,其余階數(shù)的幅值在[-0.000 2,0.000 2]之間,所有階數(shù)的相位均在[0,2π]之間。
(2)通過搭建人工神經(jīng)網(wǎng)絡偏心預測模型,可以快速精確地計算轉子零件的裝配偏心。當零件加工精度不高時,神經(jīng)網(wǎng)絡模型預測精度相對于剛體模型提高了約20%,并且計算速度從有限元模型計算兩級盤約50 min提升到神經(jīng)網(wǎng)絡模型的約5 s。
(3)使用粒子群算法可以高效地完成不同相位的優(yōu)化選擇,從結果也可明顯看出,優(yōu)化以后比未優(yōu)化時同心度明顯要更優(yōu),最終使轉子裝配同心度之和小于0.180 mm的公差設計要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車與新動力(2015年1期)2015-02-27 12:11:01