基于麥克納姆輪的無線遙控式全向移動轉運平臺設計與分析
2021-02-22 12:54:44
起重運輸機械 2021年1期
北京航天發射技術研究所 北京 100076
0 引言
目前大多數轉運支架車的移動均采用普通充氣車輪及四連桿轉向系統,雖能滿足大部分工況使用需求,但在特定空間條件下,如作業通道狹窄的工作環境,現有轉運支架車存在轉彎半徑大、空間利用率低、運動靈活性差等缺點,嚴重影響設備的工作效率[1]。而麥克納姆輪全向移動機構很好地解決了這一問題,它可以實現平面內前后、左右、自轉3 個自由度的運動,可以從當前位置快速移動到目標位置,其轉彎半徑為零,可避開靜止和運動的障礙物,節省了運動空間和時間,非常適合工作于狹窄的工廠車間、倉庫、醫院、超市等場所,在排雷、核操作等領域也有著廣闊的應用前景[2]。
本文提出了一種基于麥克納姆輪的無線遙控式全向移動轉運平臺設計方案,4 個麥克納姆輪分別由4 個電機驅動,通過控制算法完成任意方向上的平移和轉動,為提高整車越障能力,每個麥克納姆輪單獨設置了特制的懸架機構,懸架機構彈簧水平布置,降低了整車高度,使轉運平臺在滿載運行過程中更加穩定。
1 全向移動轉運平臺整體方案設計
1.1 整體結構組成
如圖1 所示,全向移動轉運平臺主要由主車架、麥克納姆輪組、懸架機構、控制系統、支撐托座、立柱等結構組成。4 個麥克納姆輪組分別由4 個單獨的電機驅動轉動,輪組與懸架機構整體通過法蘭與主車架螺接在一起,通過整體加工保證4 個輪組能夠同時與地面接觸,當某一輪組遇到障礙物時,懸架機構能夠自適應障礙物高度,確保4 個輪組任何時刻均能夠同時與地面接觸,支撐托座及立柱均屬于上裝結構,用于承載或懸掛被運輸物品,上裝結構通過螺栓與主車架連接,可根據被運輸物品結構特點設計不同的上裝結構。
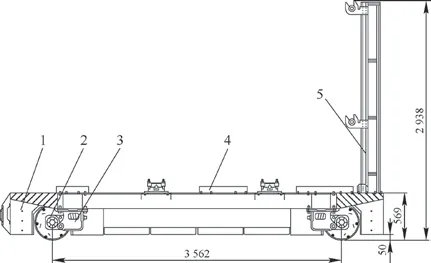
圖1 全向移動轉運平臺結構示意圖
1.2 電氣布局及組成
全向移動轉運平臺的電氣系統主要由驅動麥克納姆輪的4 個電機、鉛酸蓄電池、驅動器、DC/DC 電源模塊、充電模塊、指示燈、緊急停止按鈕、觸摸屏等組成,如圖2 所示。
1.3 遙控器及觸摸屏控制面板組成
全向移動轉運平臺采用無線遙控方式控制平臺的移動,遙控器控制面板組成如圖3 所示,主要由三軸搖桿、速度調整旋鈕、系統指示燈、報警指示燈、鈕子開關(預留)、按鍵開關(預留)、肩帶連接結構等組成。其中三軸搖桿用于控制車體各方向運動,速度調整旋鈕設置車體運行的最高限速,共分為6擋,各擋位所限制的x軸、y 軸移動速度及z 軸轉動速度如表1 所示,系統指示燈用于顯示設備軟件程序運行狀態,報警指示燈用于指示系統異常狀況,鈕子開關和按鍵開關為預留器件,用于功能擴展,肩帶連接結構用于與肩帶連接,操作遙控器時掛上肩帶,可增加操作舒適度與安全性。
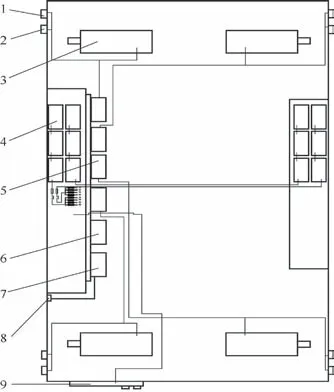
圖2 電氣布局示意圖
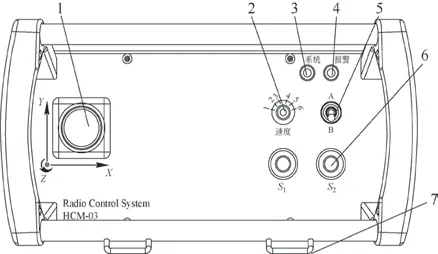
圖3 遙控器控制面板示意圖
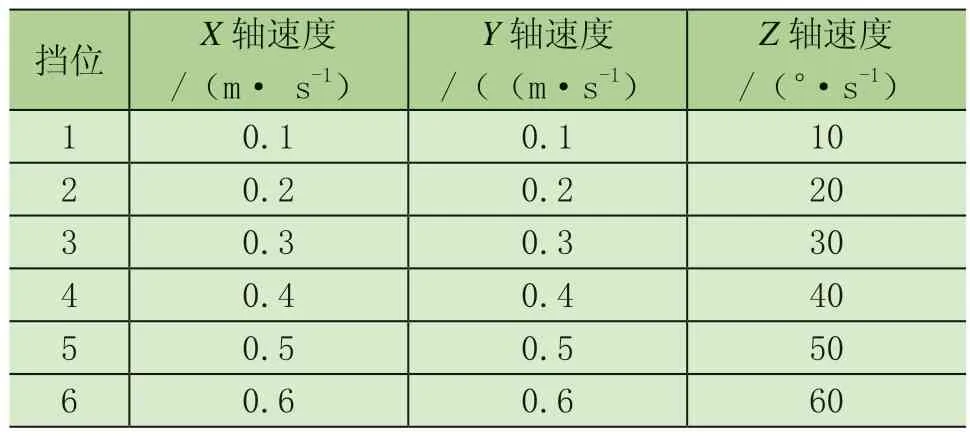
表1 擋位與最高限速對比表
在轉運平臺后端安裝了控制面板,主要用于轉運平臺狀態控制和檢測,控制面板組成如圖4 所示,主要由狀態顯示屏、充電電纜接口、充電指示燈、總開關、系統指示燈、有線控制接口、告警狀態指示蜂鳴器、電源指示燈、急停開關、電量顯示器組成。
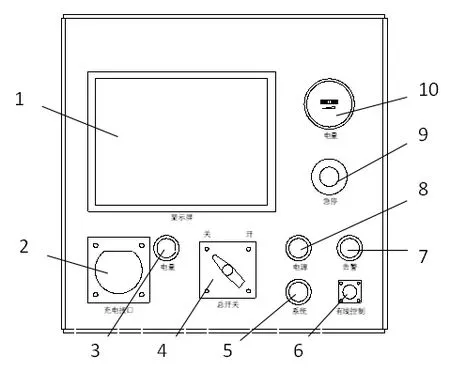
圖4 控制面板示意圖
其中狀態顯示屏用于顯示轉運平臺的各種運行狀態,充電電纜接口用于連接充電電纜,充電指示燈點亮為充電狀態,總開關用于開關設備電源,系統指示燈用于指示設備軟件程序正在運行,有線控制接口用于連接遙控器發射器,使設備進入有線控制狀態,告警狀態指示蜂鳴器用于在系統異常情況下告警,電源指示燈用于指示設備總開關已接通,急停開關用于在緊急情況下按下,使車輛緊急制動,避免危險或事故的發生,電量顯示器用于實時顯示轉運平臺電量。
2 轉運平臺運動學分析和控制策略分析
為便于分析采用麥克納姆輪的轉運平臺的運動學特性,作以下幾點基本簡化假設:1)假定轉運平臺運動于平坦地面之上,忽略地面不平整帶來的影響;2)假定轉運平臺為剛體,忽略麥克納姆輪輥子、輪轂等的變形;3)假定麥克納姆輪與地面的接觸點在輪心正下方,忽略麥克納姆輪轉動過程中輥子與地面接觸點的變化;4)忽略輥子與地面之間的打滑。
2.1 運動學方程
建立采用4 個麥克納姆輪的轉運平臺和單個麥克納姆輪的物理模型,如圖5、圖6 所示[3,4]。
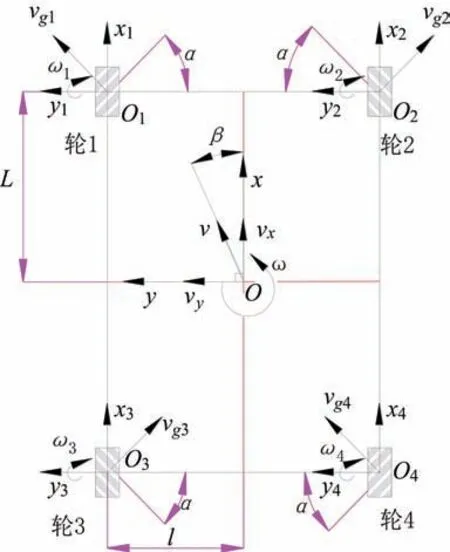
圖5 轉運平臺物理模型
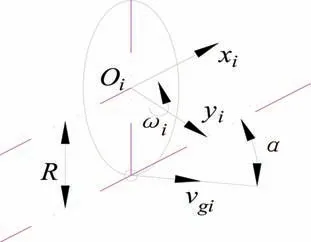
圖6 單個麥克納姆輪物理模型
圖中:Oxy 為與整個轉運平臺固連的參考坐標系,O 點為轉運平臺中心,x 沿平臺前進方向,y 沿平臺左側方向;Oixiyi為與各輪中心固連的坐標系;ω 為整車的轉動角速度;vi為各輪中心速度;ωi為各輪轉速;vgi為各輥子中心速度;α 為輥子中心與輪轂中心夾角,根據麥克納姆輪結構可知,α=45°,其中各輪輥子的方向(圖7 中陰影線方向)應按圖示狀態安裝。
以輪1 為例,由坐標系Oixiyi和Oxy 分別可得到其速度方程為
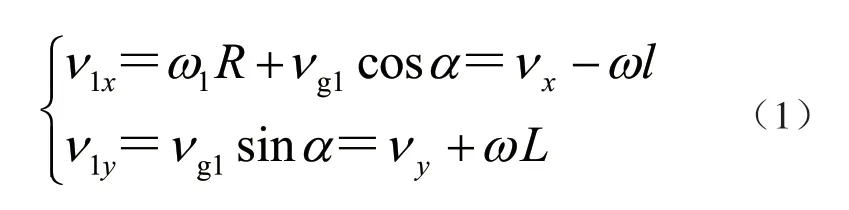
化簡可得

將α=45°代入可求得

對于輪2~輪4,同理可得
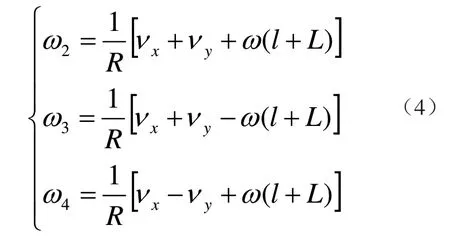
式(3)和式(4)綜合即為麥克納姆輪轉運平臺運動學方程,可采用矩陣形式表達為[5]
2.2 基本控制策略分析
根據運動學分析結果,可以得出轉運平臺在平面內各個方向運動時的控制方法。例如,若使轉運平臺僅作向前運動(即沿x 正方向移動),則有vx>0,vy=0,ω=0,將其代入逆運動學方程,可求得

由式(6)可知,若使轉運平臺僅作向前運動,則應使4 個麥克納姆輪均朝同一方向作等速轉動,各輪角速度方向應沿圖示y 正方向。轉運平臺的前進速度大小為單個麥克納姆輪角速度(ωi,i=1~4)與輪轂中心距地高度R 之積。同理,可以得出麥克納姆四輪轉運平臺向后、向左、向右、原地旋轉的控制方法。
3 懸架機構設計
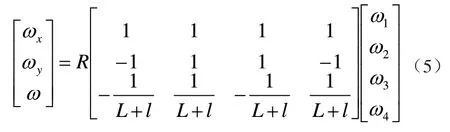
懸架機構主要由基座、導向桿、彈簧、螺母組成。其中,基座通過回轉耳與麥克納姆輪組連接,并通過螺栓固定在車架上,麥克納姆輪可繞回轉耳轉動,并通過彈簧將載荷傳遞至車架上。懸架機構示意圖如圖7 所示。
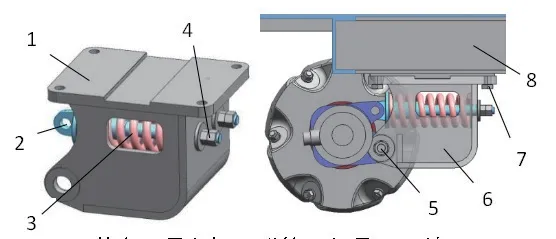
圖7 麥克納姆輪懸架機構組成示意圖
懸架機構主要功能是為每個麥克納姆輪提供預置推力,保證其在越溝、越障等過程中始終與地面接觸,避免運動失控[6]。此外,懸架中的彈簧可為車架提供緩沖減震作用。懸架機構基本原理如圖8 所示。
圖8 麥克納姆輪懸架機構基本原理
3.1 越障能力分析
對于麥克納姆輪轉運平臺而言,需通過懸架機構保證輪轂不脫離地面,在遇到具有一定高度h 的凸起或凹坑時仍具備通過能力,即具有一定的越障或越溝能力(以下統稱為越障)。彈簧是懸架機構的重要零件,其工作行程是設計彈簧的關鍵參數,故對地面起伏高度h 與懸架彈簧工作行程△l 之間的關系進行計算[7]。
建立單個懸架機構適應地面升降時的幾何關系圖,如圖 9 所示。其中,A 為麥克納姆輪的回轉中心,B 為彈簧在車架上的固定點,P1、P2分別為彈簧在輪轂上的初始固定點、轉動后固定點,O1、O2分別為麥克納姆輪的初始質心、轉動后質心,Q1、Q2分別為麥克納姆輪與地面的初始接觸點、轉動后接觸點。
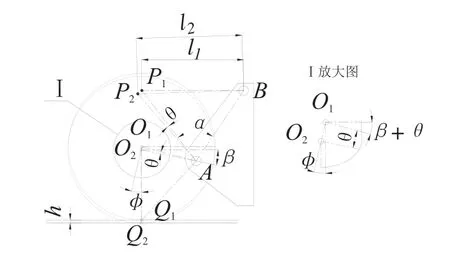
圖9 懸架機構幾何關系示意圖
圖中:a 為O1A、O2A 的長度,b 為P1A、P2A 的長度,c 為AB 的長度,α 為BA 和AP1的夾角,β 為O2A 與水平方向夾角,O1A 與水平方向夾角為(β+θ),φ為O1O2與豎直方向夾角,h 為地面升降高度,θ 為地面升降h 時的旋轉角度,l1為彈簧初始長度,l2為轉動后彈簧長度,△l 為彈簧長度變化量,△l=l2-l1。
首先分析△l 與轉角θ 的關系,由余弦定理可得
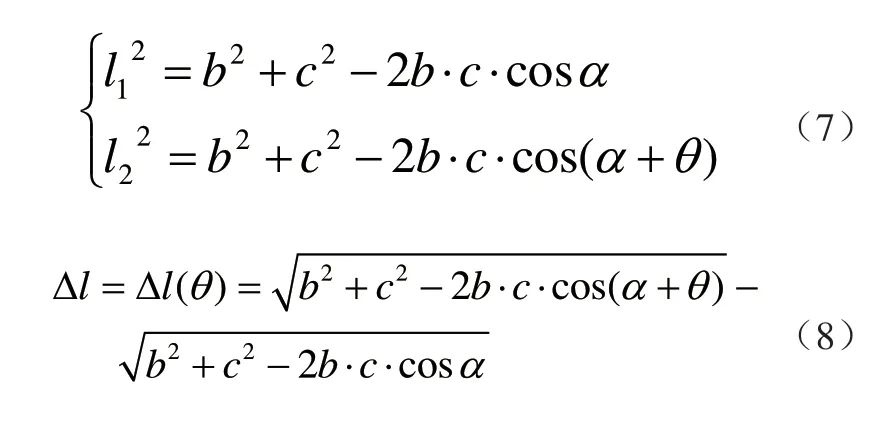
由式(8)可知,在[0,π]范圍內,隨著θ 的增大,△l 也隨之增大。
根據圖中幾何關系可得h 與轉角θ 的關系為

由式(9)可知,在[0,π]范圍內,隨著θ 的增大,h 也隨之增大。
結合式(8)和式(9),可得地面升降高度h 與懸架彈簧工作行程△l 的關系式為
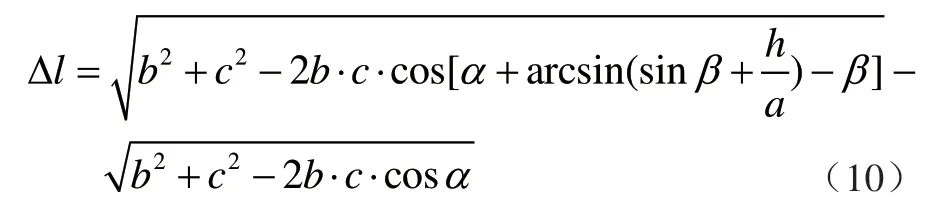
根據結構優化設計結果可知:α=70.6°,β=24°,a=115 mm,b=107.1 mm,c=272.4 mm。可得當前結構狀態下,彈簧行程△l 與地面升降高度h 之間的關系曲線,如圖10 所示,可知,隨著h 的增大,△l 與h 近似為正比關系。
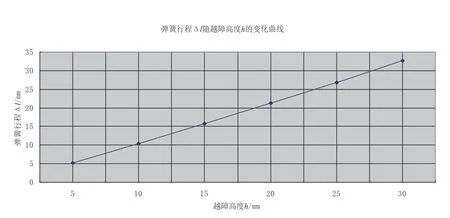
圖10 懸架彈簧行程隨地面升降高度的變化曲線
綜上可知,懸架機構的越障高度與懸架彈簧的工作行程為近似正比關系,當需要實現5 mm、10 mm、20 mm 的越障能力時,懸架彈簧的工作行程應不小于5.1 mm、10.4 mm、21.2 mm。
3.2 懸架受力分析
在設計懸架彈簧時,應保證在空載和滿載情況下,均對麥克納姆輪具有一定的預制推力,保證其在升降過程中始終貼緊地面。為此,懸架彈簧力值應包絡空載和滿載情況下的所需載荷,即在空載和滿載(包括偏載)情況下均能具有足夠的越障能力。
建立麥克納姆四輪全向移動支架車在空載(無偏載)和滿載(有隨機偏載)情況下的受力模型,如圖11 所示。
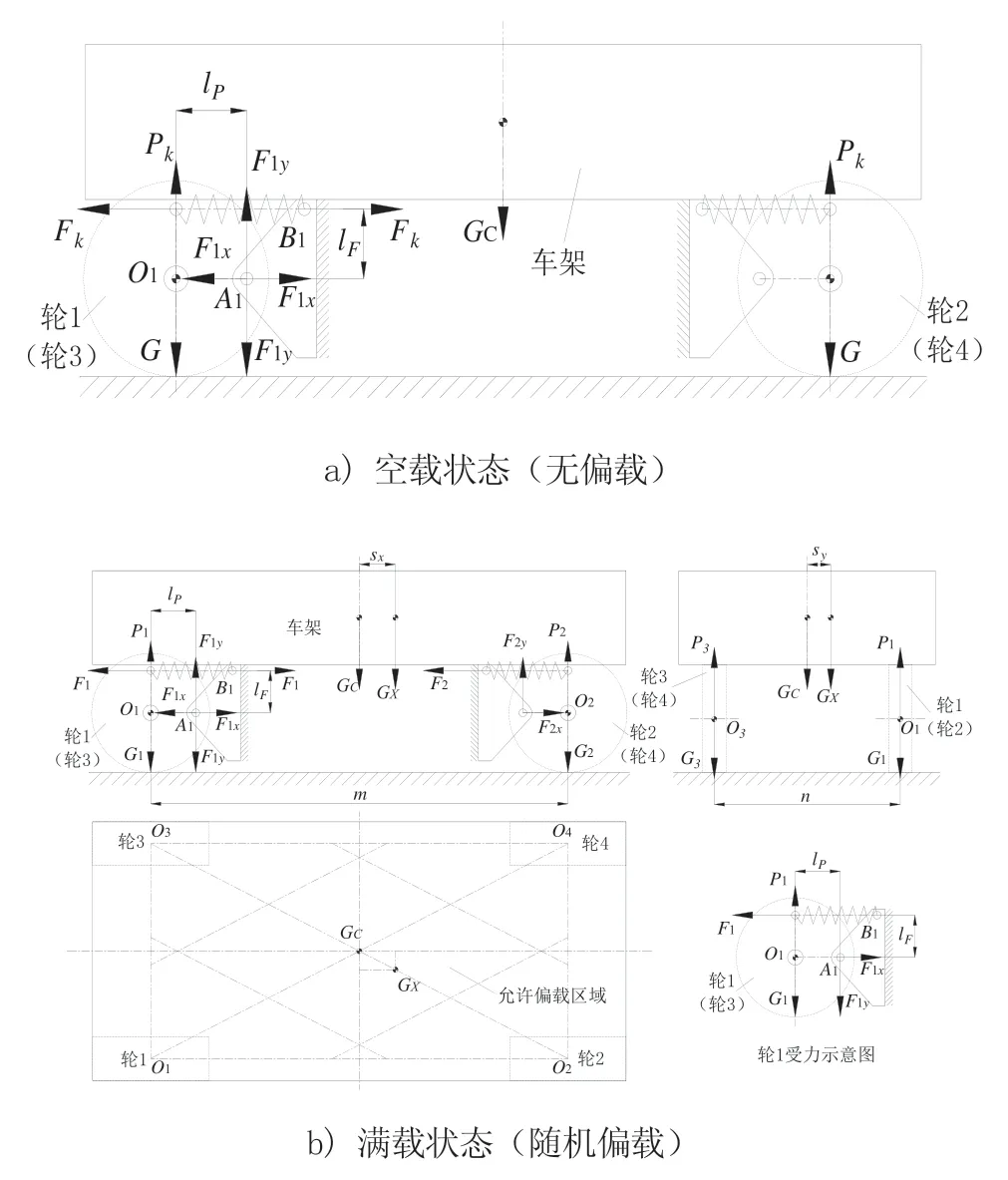
圖11 懸架機構受力示意圖
圖中:Gc為整車重力(不含輪子),Gc=2.2 t=22 000N;Gx為負載重力,額定載荷為GX=2.2 t=20 000 N;G1~G4為每個麥克納姆輪組所受重力(包括固定在輪轂上的電機和減速器),G=G1=G2=G3=G4=1 000 N;Fk為空載時每個懸架機構彈簧作用力;Pk為空載時每個輪子受地面的支撐力;F1~F4為滿載時每個懸架機構彈簧作用力;P1~P4為滿載時每個輪子受地面的支撐力。
1)空載狀態
首先取整車為研究對象,由受力分析(豎直方向受力平衡)可知
再取單個麥克納姆輪為研究對象,由受力分析(力矩平衡)可知
其中,根據結構設計和鉸點優化結果可知,lp≈105mm,lF≈105mm,由于在車架和輪子相對運動過程中,lp、lF變化很小,為便于分析可視之為常數。
2)滿載狀態
考慮負載作用的隨機性,以及4 點支撐的靜不定情況,無法準確得出每個輪子的受力分配關系,為得到滿載時所需彈簧作用力Fmax需,可按單個麥克納姆輪額定載荷Pmax=2 t=20 000 N 進行計算,即有

另外,在輪距(O1O2O3O4)范圍內施加負載的過程中,4 個輪子的支撐力不會出現減小的情況,故所需彈簧最小作用力Fmin需按空載計算結果進行設計,即有

單個懸架機構中設計兩根并聯的彈簧,設空載時所需單個彈簧作用力為Fmin,在滿載時所需單個彈簧作用力為Fmax,則Fmin=2 750 N、Fmax=9 500 N。設彈簧設計力值范圍為[F1,Fn],則有
①考慮空載時整車自身質心偏差,應有F1<Fmin=2 750 N;
②考慮包絡單個麥克納姆輪承受額定載荷時的所需彈簧力,應有Fn>Fmax=9 500 N。
3.3 越障能力校核
綜合以上參數,合理設計彈簧參數[8],麥克納姆輪轉運平臺的懸架機構具有以下越障能力
1)空載狀態下,懸架單個彈簧作用力為Fmin=2 750 N,此時彈簧具備伸縮11.3 mm >10.4 mm 的能力,故空載時懸架機構具備10 mm 越障能力;
2)滿載狀態下,在單個輪子承載不超額定2 t 載荷的前提下,懸架的彈簧作用力不超過Fmax=9 500 N,此時懸架彈簧具備伸縮16.1 mm >10.4 mm 的能力,故滿載時懸架機構具備10 mm 越障能力。
4 結論
基于麥克納姆輪的無線遙控式全向移動轉運平臺目前已經在操作車間得到應用,操作簡單方便,移動過程中占用空間小,移動靈活,一次充電可連續運行8 h。該產品與普通轉運支架車相比避免了人力推行操作,空間利用率高,智能化程度高,應用前景十分廣闊。
