長大隧道貫通前鋪軌CPⅡ?qū)Ь€陀螺方位約束應(yīng)用探討
2021-02-24 04:44:22王廣科王正邦陳光金付宏平
隧道建設(shè)(中英文) 2021年1期
王廣科, 王正邦, 陳光金, *, 付宏平
(1. 中鐵隧道集團一處有限公司, 重慶 401123; 2. 陜西省鐵道及地下交通工程重點實驗室(中鐵一院), 陜西 西安 710043)
0 引言
我國隧道工程建設(shè)項目眾多,特長隧道的建設(shè)工期一直是制約全線竣工通車的瓶頸。采用隧道整體貫通前提前實施軌道鋪設(shè)[1-2]的施工組織方案,可以大大縮短施工工期、節(jié)省大量施工費用、產(chǎn)生良好的社會效益,因而受到建設(shè)單位的青睞。由于該方案實施的技術(shù)難度大,一直是近年隧道施工測量的研究方向[3-5]。
對于采用一邊開挖掘進施工,一邊對已經(jīng)貫通襯砌段分期、分段提前鋪設(shè)無砟軌道的隧道來說,需要分期建立洞內(nèi)CPⅡ?qū)Ь€用于軌道鋪設(shè)。此時,洞內(nèi)CPⅡ?qū)Ь€具有雙重功能,既要在襯砌完工段用于軌道鋪設(shè),又要在開挖掘進段從洞內(nèi)CPⅡ?qū)Ь€終點向前延伸,指導洞內(nèi)后續(xù)開挖掘進施工,起到洞內(nèi)施工控制導線的作用。在隧道采用平導施工而無斜井方位角附合條件時,洞內(nèi)CPⅡ?qū)Ь€為一條交叉支導線網(wǎng)。如何保證隧道準確貫通、洞內(nèi)CPⅡ?qū)Ь€與隧道建筑限界匹配、隧道貫通前后相向施工的無砟軌道無縫對接是精密控制測量中的技術(shù)難題。這種施工方案需要保障隧道洞外施工控制網(wǎng)[6-8]及洞內(nèi)控制網(wǎng)精度,確保最后掘進段貫通誤差小,滿足軌道鋪設(shè)精度要求。洞外施工控制網(wǎng)采用衛(wèi)星定位技術(shù),其精度易于保證;而洞內(nèi)CPⅡ?qū)Ь€的精度保障[9-11]是關(guān)鍵問題。對采用平行導坑方式施工的山嶺特長隧道來說,以優(yōu)先采用加測高精度陀螺方位邊[9]的方式予以實現(xiàn)。本文所述的陀螺坐標方位角,是根據(jù)洞口地面陀螺方位、CPⅡ進洞導線公共邊陀螺定位測量方位角的關(guān)系進行換算后的結(jié)果,與本隧道CPⅡ坐標方位角屬于相同的坐標系統(tǒng)基準。
目前,陀螺方位邊的工程應(yīng)用及研究文獻資料較多,主要集中在鐵路隧道、城市地鐵、礦山等地下工程的施工掘進過程中。其主要用于地下掘進時控制導線的坐標方位角檢核[12-14],或校正調(diào)整前進方向的方位角[15-17],個別工程以陀螺施測方位作為觀測值參加導線方向平差[18-19],采用陀螺方位約束[20-21]的工程實踐較少。而在提前鋪設(shè)無砟軌道的隧道實踐中[1-2],雖然洞內(nèi)控制導線中引入了陀螺方位[9],但尚無CPⅡ?qū)Ь€基于陀螺方位邊約束的應(yīng)用經(jīng)驗,現(xiàn)有文獻也主要從陀螺定向邊位置數(shù)量的選擇、測量方法與計算、陀螺方位角觀測值的應(yīng)用區(qū)間等方面進行研究。
本文以某特長隧道整體貫通前分段鋪設(shè)無砟軌道的工程實踐為例,在洞內(nèi)鋪軌CPⅡ?qū)Ь€中嘗試加測高精度陀螺方位邊,解決隧道采用長距離平導施工、洞內(nèi)導線無方位角附合條件下,與平導聯(lián)測形成的“回頭”型導線由于布網(wǎng)方案欠佳,精度難以提高,難以滿足鋪軌精度要求,貫通面前后的軌道鋪設(shè)可能錯位的工程難題。
1 依托工程概況
某特長隧道全長13.195 km,最大埋深為650 m。洞身線路采用人字坡設(shè)計,隧道除進口段33.92 m及出口段429.84 m位于半徑為800 m的曲線上外,洞身其余地段均位于直線上。隧道分進口、1號斜井、2號斜井、隧道出口、出口平導5個作業(yè)面。在隧道沒有全部貫通(剩余1.273 km)的情況下,確定提前開展洞內(nèi)已經(jīng)貫通段落的整體道床鋪設(shè)工作,共分3期鋪軌。隧道掘進施工和鋪軌計劃見圖1。

圖1 隧道掘進施工和鋪軌計劃示意圖(單位: km)
2 CPⅡ?qū)Ь€加測陀螺方位邊必要性分析
在隧道未全部貫通的條件下,一邊施工掘進,一邊分期、分段鋪設(shè)整體道床的施工測量方案,要求貫通面處的貫通誤差盡量小,以保障最后貫通段橫向錯位偏差、高程錯臺偏差滿足短距離(正常距離為隧道全長)控制測量的閉合精度要求。使相向施工鋪設(shè)的無砟軌道實現(xiàn)準確對接,滿足前、后期整體道床平順銜接需求,這是實施此類工程的最大難題,而如何保障洞外、洞內(nèi)控制網(wǎng)的精度十分關(guān)鍵。
洞外鋪軌平面控制網(wǎng)可以通過埋設(shè)強制對中標,采用高精度的一等GNSS技術(shù)施測;采用不引入約束基準誤差的一點一方向法評價洞外原施工控制網(wǎng)的實際精度;采用以不損失基準網(wǎng)精度為原則的施工控制點選擇處理技術(shù),鋪軌重建網(wǎng)測量中選擇符合精度要求的原施工控制點作為鋪軌控制點。
總結(jié)以往工程實踐經(jīng)驗并結(jié)合現(xiàn)場測量情況分析可知: 本工程進口端可與1#、2#斜井口控制點聯(lián)測,洞內(nèi)鋪軌平面控制網(wǎng)精度易于保障;而出口端為長距離平導方式施工,平導內(nèi)控制點無法使用,與主洞連接的橫通道僅30 m,出口端隧道洞內(nèi)鋪軌平面控制網(wǎng)精度保障困難。從圖1中可以看出: 進、出口端洞內(nèi)CPⅡ?qū)Ь€具有雙重功能,不但要用于隧道軌道鋪設(shè),還要用于洞內(nèi)后續(xù)施工的控制導線。完工段軌道鋪設(shè)CPⅡ?qū)Ь€要求與隧道建筑限界匹配,后續(xù)施工控制導線以CPⅡ為起算基準,用于指導貫通面方向的開挖掘進施工。隧道洞內(nèi)鋪軌CPⅡ、CPⅢ控制網(wǎng)是按施工進度分期、分段建立,進口端1、2期CPⅡ?qū)Ь€有穿出斜井口與地面控制點附合的方位角檢查條件,測量精度可以保障;而出口端采用平導施工,CPⅡ?qū)Ь€雖然可以通過平導與洞外附合,但會形成較大的“回頭”型導線,布網(wǎng)方案欠佳,精度難以提高,難以滿足鋪軌精度要求。由于隧道主體未完全貫通,無法形成出口經(jīng)貫通面至2#斜井的附合導線網(wǎng),即出口端洞內(nèi)CPⅡ?qū)Ь€無方位角附合檢查條件,在出口─貫通面─2#斜井口處形成長達近10 km的支導線網(wǎng),加上洞內(nèi)觀測環(huán)境條件差,地下水豐富,出水量大,水汽、煙塵影響嚴重,施工干擾大等諸多不利因素,實施過程中盡管采取了一些特殊措施(見圖2),但經(jīng)估算分析,仍難以控制整體貫通處的橫向貫通誤差。因此,提前鋪軌隧道時在洞內(nèi)CPⅡ?qū)Ь€中引入陀螺方位控制技術(shù)十分必要。

(a) 抬高視線強制對中墩 (b) 超短邊(25 m)強制對中盤 (c) 小曲線對穿隧道雙強制對中盤 (d) 雙測站方式進洞
隧道洞內(nèi)CPⅡ測量中引入陀螺方位控制技術(shù),采用高精度全自動陀螺儀——中國航天BTJ-3型全自動陀螺尋北儀與徠卡TS16全站儀(標稱精度1″,1 mm+1.5×10-6)組合進行對向觀測陀螺方位角,陀螺方位角標稱定向精度為3.6″。除了在“回頭”型導線、布網(wǎng)方案欠佳、精度難以提高、難以滿足鋪軌精度要求的出口端加測2條陀螺方位邊外,在進口端掘進段的襯砌終點加測1條陀螺邊,在已經(jīng)貫通地段1#、2#斜井間也加測2條陀螺方位邊,實現(xiàn)對洞內(nèi)CPⅡ支導線的方向控制。陀螺方位邊布設(shè)位置見圖3。
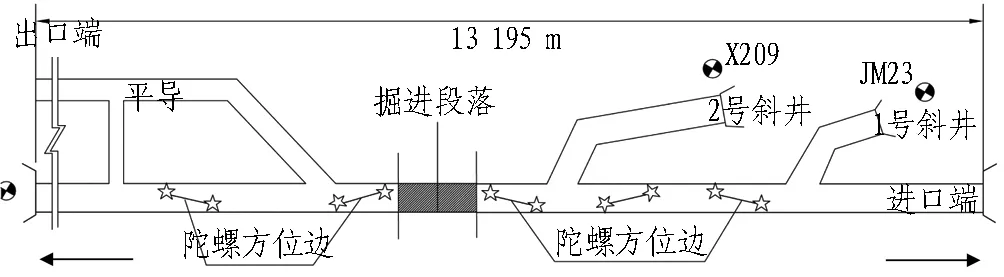
圖3 陀螺方位邊布設(shè)位置
3 特長隧道CPⅡ?qū)Ь€加測陀螺方位邊應(yīng)用條件研究
針對目前洞內(nèi)CPⅡ?qū)Ь€沒有應(yīng)用陀螺方位的現(xiàn)狀,根據(jù)該隧道洞內(nèi)CPⅡ?qū)Ь€實際數(shù)據(jù),開展CPⅡ?qū)Ь€利用高精度陀螺儀加測陀螺方位后的應(yīng)用探索。利用式(1)—(2)將洞內(nèi)陀螺方位邊換算為隧道CPⅡ系統(tǒng)下的陀螺坐標方位角進行分析研究。
1)洞口外地面儀器常數(shù)
Δ=αJD-(αT-JD-γW)。
(1)
式中:αJD為洞外地面進洞已知邊CPⅡ坐標方位角;αT-JD為洞外地面同名已知邊上測得的陀螺方位角;γW為洞外設(shè)站點的子午線收斂角。
2)洞內(nèi)陀螺定向待測邊坐標方位角
F=(αT-γ)+Δ。
(2)
式中:αT為洞內(nèi)待測邊上測得的陀螺方位角;γ為洞內(nèi)設(shè)站點的子午線收斂角。
3.1 陀螺坐標方位角精度匹配與較差限差標準研究
在研究時,首先以各洞口的進洞控制點為約束基準(見圖3)進行支導線平差,獲取各導線邊的坐標方位角精度信息,共完成5條支導線平差。然后在全站儀導線、陀螺方位公共邊上,按附合導線坐標方位角閉合差檢查方式,進行鋪軌CPⅡ交叉支導線網(wǎng)坐標方位角與陀螺坐標方位角的精度匹配研究。
導線坐標方位角與陀螺坐標方位角較差的限差標準分別采用3種不同方式進行研究,即按《高速鐵路工程測量規(guī)范》[22]洞內(nèi)二等限差、隧道二等限差以及不同精度的坐標方位角較差中誤差法(簡稱較差法)綜合分析。較差法是按誤差傳播定律,取2倍較差中誤差作為限差,公式推導如下:
方位角較差
ΔFβ=F導線-F陀螺。
(3)
方位角閉合差限差
(4)
式(3)—(4)中:F導線為CPⅡ交叉支導線網(wǎng)陀螺公共邊方位角平差;F陀螺為CPⅡ交叉支導線網(wǎng)陀螺邊坐標方位角實際值;mF導線為CPⅡ交叉支導線網(wǎng)陀螺公共邊方位角平差中誤差;mF陀螺為交叉支導線網(wǎng)陀螺邊坐標方位角實際值中誤差。
鑒于mF陀螺受陀螺方位角測定精度、儀器常數(shù)測定精度、外界觀測條件等多種因素影響,很難準確獲取。經(jīng)過分析,取為儀器標稱精度基本合理,即mF陀螺=3.6″。

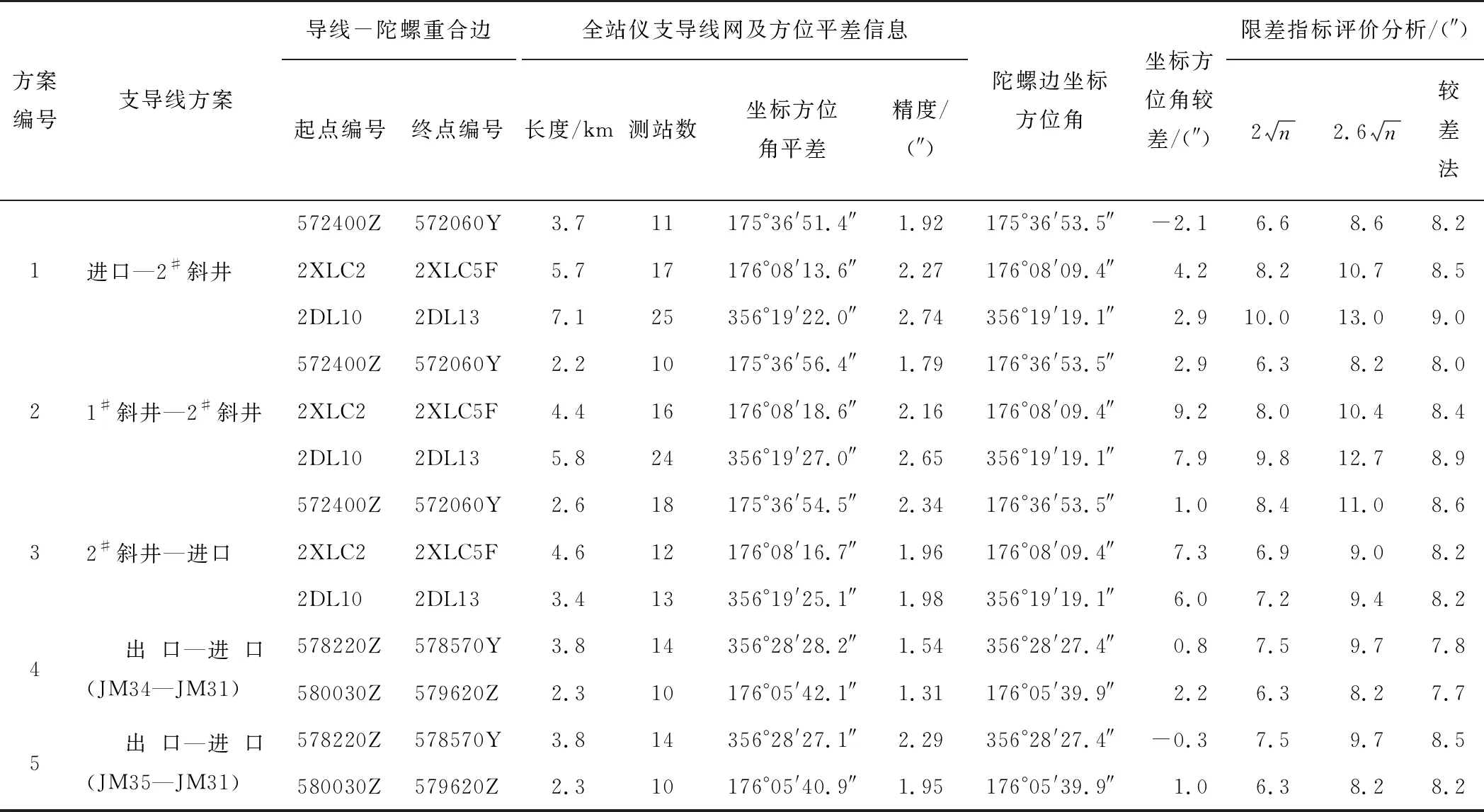
表1 鋪軌CPⅡ交叉支導線網(wǎng)與陀螺坐標方位角精度與較差評價比較

表2 坐標方位角精度與較差指標合理性統(tǒng)計分析表
從表1和表2中可以看出:
1) 短距離導線2~3 km加測陀螺方位邊,CPⅡ支導線坐標方位角精度在1.31″~2.34″,略高于陀螺邊坐標方位角標稱精度(3.6″);長距離導線4~7 km加測陀螺方位邊,CPⅡ支導線坐標方位角精度在1.96″~2.74″,由于陀螺坐標方位角測量精度評價體系與導線不同,實際精度應(yīng)該小于標稱精度(3.6″)。因此,本隧道CPⅡ?qū)Ь€邊坐標方位角精度與陀螺邊坐標方位角精度相當。
2) 高精度陀螺儀測量獲取的坐標方位角與全站儀導線坐標方位角較差的限差指標,與按隧道二等導線設(shè)計精度計算的坐標方位角復(fù)測限差的精度評定指標值相當。因此,可采用隧道二等導線測角精度作為參照,制定二者方位角較差的限差指標。本隧道陀螺定向測算坐標方位角與對應(yīng)邊的全站儀導線坐標傳遞方位角的較差不大,與全站儀導線觀測精度匹配,均能夠達到鐵路隧道二等導線精度,考慮2種坐標方位角精度相當,可以當作同精度擴展。鑒于高精度陀螺定向重復(fù)觀測后方位角精度的可靠性及其誤差的不傳遞性,2種方法測量結(jié)果的較差除了當作閉合差對待外,將高精度陀螺儀定向所得的坐標方位角用作精度等級大致相匹配的導線坐標方位角約束基準是適宜的。
3.2 隧道鋪軌建筑限界匹配檢查方法
隧道洞內(nèi)CPⅡ?qū)Ь€是進行軌道鋪設(shè)的基準,其必須與隧道建筑限界匹配,才能實現(xiàn)軌道放樣的實地位置與隧道建筑限界匹配。實際上,采用隧道整體貫通后鋪軌方式,最后的建筑限界基準為進出口間的CPⅡ附合導線,必要時,采用加入斜井導線的結(jié)點網(wǎng)。
對于整體貫通前分段鋪設(shè)無砟軌道、利用平導施工而無斜井方位角附合條件的隧道,必須聯(lián)測施工控制支導線點,采用CPⅡ支導線網(wǎng)加陀螺后的坐標進行比較,了解分析洞內(nèi)陀螺CPⅡ?qū)Ь€與建筑限界關(guān)系,并作為洞內(nèi)CPⅡ?qū)Ь€是否與隧道鋪軌建筑限界匹配的檢查依據(jù)。可以將施工控制支導線與CPⅡ?qū)Ь€的坐標差異換算為縱橫向偏差,進行隧道建筑限界的符合性檢查。
3.3 高精度陀螺儀CPⅡ?qū)Ь€的閉合差法檢查
隧道洞內(nèi)CPⅡ?qū)Ь€需要隧道鋪軌建筑限界匹配。首先進行出口端支導線平差,將位置不同的高精度陀螺儀方位邊和聯(lián)測的施工導線點組合,當作已知坐標方位角和已知坐標值,按附合導線對待;然后采用閉合差法進行檢查,包括坐標方位角閉合差檢查、導線坐標閉合精度檢查及建筑限界符合性檢查,檢查結(jié)果見表3和表4。
從表3和表4可以看出: 鋪軌交叉支導線網(wǎng)方位角閉合、與施工控制導線的導線全長相對閉合差均達到隧道二等方位角閉合差(12.0″),導線全長相對閉合差1/100 000的限差要求,導線附合精度良好。隧道基本呈南北走向,CPⅡ?qū)Ь€與隧道建筑限界的橫向差異在0.015 m左右,采用CPⅡ?qū)Ь€鋪軌施工,軌道實地位置與隧道壁的相對關(guān)系滿足隧道建筑限界要求。

表3 隧道出口端坐標方位角的閉合差檢查表

表4 隧道出口端CPⅡ?qū)Ь€坐標閉合精度與建筑限界檢查表
3.4 陀螺CPⅡ橫向偏差與建筑限界匹配優(yōu)化檢查
考慮高精度陀螺儀測量的坐標方位角精度與CPⅡ支導線坐標方位角精度相當,可以當作同精度擴展。將陀螺邊坐標方位角作為約束基準,方位角較差當作閉合差對待,在CPⅡ支導線平差觀測值輸入的in1文件中,對有陀螺方位邊的測站觀測值文件增加1行陀螺邊照準方向,觀測值類型為A,觀測值直接輸入陀螺坐標方位角,觀測值的精度值輸為0,利用科傻軟件進行陀螺方位的約束平差。
用基于陀螺方位邊約束的CPⅡ支導線平差結(jié)果,進行約束前后的建筑限界匹配檢查。可以采用設(shè)計線條+聯(lián)測施工導線點展點在CAD中手工量取,如圖4所示。
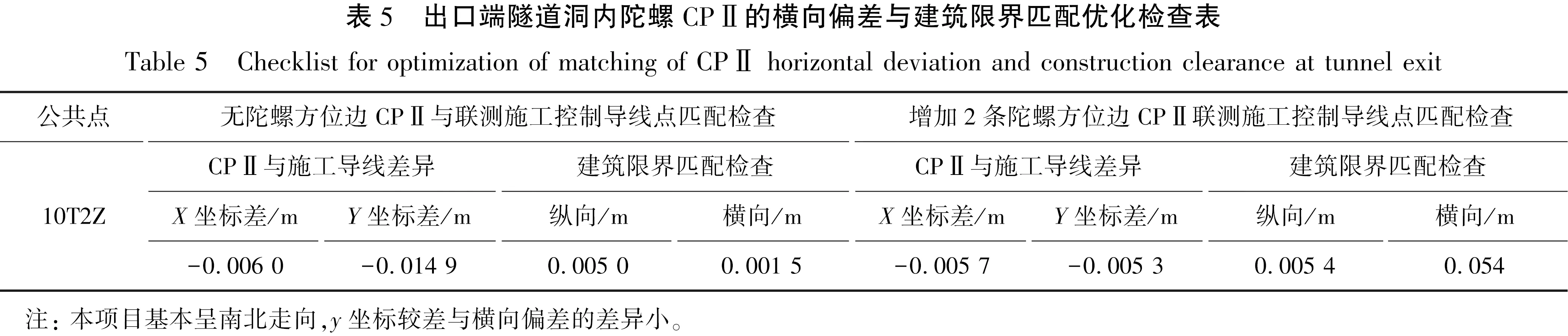
建筑限界匹配檢查也可以按式(5)利用坐標較差FX、FY轉(zhuǎn)換獲取,檢查結(jié)果見表5。
(5)
式中:FX、FY為聯(lián)測施工在用支導線控制點的CPⅡ位置與原位置的坐標較差;α為設(shè)計理論中線前進方向的坐標方位角。
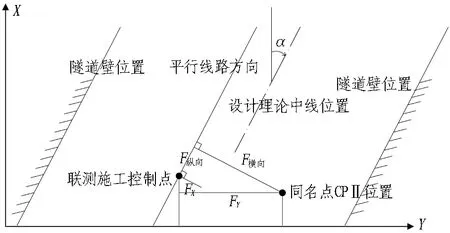
圖4 隧道洞內(nèi)CPⅡ?qū)Ь€與建筑限界匹配檢查
從表5可以看出: CPⅡ支導線約束陀螺方位邊后的導線與施工控制導線的坐標較差小,橫向偏差得到優(yōu)化,建筑限界匹配良好,采用出口平導方式的開挖掘進及鋪軌施工可以采用陀螺方位約束方案。
綜合以上分析,CPⅡ?qū)Ь€基于陀螺方位約束的應(yīng)用條件應(yīng)滿足如下要求:
1) 公共邊鋪軌交叉支導線網(wǎng)坐標方位角與陀螺坐標方位角較差按間隔測站數(shù)計算,滿足隧道二等方位角閉合差精度要求。
2) 需要聯(lián)測隧道掘進施工控制導線點,與施工控制導線的導線全長相對閉合差應(yīng)達到隧道二等精度的限差要求。
3) 鋪軌交叉支導線網(wǎng)應(yīng)先按嚴密平差計算,公共邊導線坐標方位角精度應(yīng)與陀螺坐標方位角精度相當。
4) 鑒于隧道已經(jīng)襯砌完工地段工程結(jié)構(gòu)的不可更改性,基于陀螺坐標方位角約束的CPⅡ?qū)Ь€與隧道建筑限界的匹配應(yīng)得到優(yōu)化;洞內(nèi)CPⅡ中聯(lián)測的施工導線點,其橫向偏差應(yīng)在隧道施工凈空裕量范圍內(nèi)(5 cm)。
4 結(jié)論與討論
本文通過CPⅡ?qū)Ь€加測陀螺方位的應(yīng)用條件研究,引入支導線坐標方位角平差精度,以導線測站數(shù)評價2種坐標方位角較差的評價指標,得出CPⅡ交叉導線長度在7 km內(nèi)的導線坐標方位角與陀螺坐標方位角精度相當、坐標方位角較差及導線全長相對閉合精度滿足隧道二等限差要求、與隧道建筑限界的匹配應(yīng)得到優(yōu)化,且洞內(nèi)CPⅡ中聯(lián)測的施工導線點橫向偏差在隧道施工凈空裕量范圍內(nèi)(5 cm)的條件下,可以采用基于陀螺方位約束的CPⅡ?qū)Ь€平差方案的結(jié)論。隧道貫通竣工后鋪軌的測量結(jié)果表明: 控制網(wǎng)的橫向貫通誤差僅0.8 mm,相向施工的無砟軌道可以準確對接,驗證了采用基于陀螺方位約束的CPⅡ?qū)Ь€平差方案的必要性。
國內(nèi)現(xiàn)有文獻資料均沒有涉及陀螺坐標方位角與隧道建筑限界的匹配方面的應(yīng)用研究,尚難以進行陀螺坐標方位角的實際精度評價。本隧道洞內(nèi)CPⅡ?qū)Ь€采用基于與隧道建筑限界匹配的陀螺方位約束方法,2020年10月,工務(wù)驗收基本完成,軌道的平順性和隧道建筑限界及其他各項指標滿足工務(wù)驗標要求,節(jié)約施工工期3個月,提前鋪軌測量體系方法得到工程驗證,表明本文提供的方法具有實踐價值,以期為今后其他隧道工程和規(guī)范修訂提供借鑒經(jīng)驗。
在洞內(nèi)CPⅡ中應(yīng)用陀螺坐標方位角約束,關(guān)鍵是要采用高精度的陀螺儀,下一步的研究課題是如何獲取高精度的陀螺方位角,繼續(xù)進行洞內(nèi)CPⅡ中應(yīng)用陀螺坐標方位角約束的工程驗證,不斷在實踐中總結(jié)、完善陀螺方位角精度評價應(yīng)用體系。完善陀螺方位角精度評價體系,建議施工單位做到以下2點:
1) 提供無震動、無干擾的測量環(huán)境,以便獲取高精度的陀螺方位角。
2) 保證陀螺方位邊公用控制點長久保存,后期CPⅡ?qū)Ь€的能夠聯(lián)測使用。
猜你喜歡
建材發(fā)展導向(2022年10期)2022-07-28 03:04:36
北方建筑(2021年6期)2021-12-31 03:03:54
建材發(fā)展導向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導向(2021年9期)2021-07-16 07:11:36
文苑(2020年10期)2020-11-07 03:15:36
現(xiàn)代裝飾(2020年6期)2020-06-22 08:43:12
現(xiàn)代裝飾(2020年4期)2020-05-20 08:55:08
福建農(nóng)業(yè)科技(2016年10期)2016-03-07 09:46:49
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
