一種基于CMA和DDLMS算法的雙模式盲均衡算法*
2021-02-25 10:12:30胡婉如梅如如王竹剛
電訊技術 2021年1期
關鍵詞:符號
胡婉如,梅如如,崔 健,王竹剛
(1.中國科學院 國家空間科學中心,北京 100190;2.中國科學院大學,北京 100049;3.北方工業大學 信息學院,北京 100144)
0 引 言
在衛星通信系統中,有限的傳輸帶寬、多徑效應和加性噪聲等因素會導致接收的碼元存在很嚴重的碼間串擾,嚴重影響通信質量,降低通信的可靠性與穩定性[1]。目前,信道均衡技術是解決這一問題的有效方式,在軍事和民用領域都有著廣泛的應用前景。由于無線通信信道的傳輸特性往往是時變的,因此均衡器在處理接收信號時必須實時跟蹤信道的變化,才能消除碼間串擾,補償失真的信號。為了實現這一目標,均衡系數可以調整的自適應均衡技術被提出。自適應均衡技術主要分為傳統的自適應均衡和盲均衡兩類。傳統的自適應均衡算法主要有最小均方(Least Mean Square,LMS)算法和遞歸最小二乘(Recursive Least Squares,RLS)算法兩種,需要足夠的訓練序列才能達到比較好的效果,這會降低頻譜利用率[2],因此本文主要基于盲均衡進行研究。
幾十年來,針對不同的應用需求,研究者提出了多種盲均衡算法。其中,最早提出的常模算法(Constant Modulus Algorithm,CMA)易于實現,計算量少,是目前應用最廣泛的一種盲均衡算法,但是存在著收斂速度慢、穩態誤差大、無法修正相位偏移等缺點[3]。為了進一步改善相位恢復能力[4],修正恒模算法(Modified Constant Modulus Algorithm,MCMA)被提出,然而其在收斂速度和穩態誤差方面并沒有明顯改進。因此,為了進一步提高均衡器的收斂速度和降低穩態誤差,有學者提出了Bussgang類盲均衡算法和判決引導最小均方(Direct Decision Least Mean Square,DDLMS)算法相聯合的雙模式盲均衡算法。基于該基本原理,王光旭等人[5]提出了基于余弦代價函數的雙模盲均衡算法。該算法中兩個均衡器并聯使用,且使用凸組合結構聯合兩個均衡器,因此復雜度高。同年,叢文勝[6]提出了并行多模算法(Multimode Algorithm,MMA)+區域多模算法(Regional Multimode Algorithm,RMA)的組合算法。該算法也是兩個均衡器并聯使用,每一次迭代過程中都需要計算兩種算法的誤差,因此復雜度也高。此外,該算法在收斂初期利用Bussgang類盲均衡算法使算法的均方誤差減小,然后切換到DDLMS算法,使均衡效果達到更優。將Bussgang類盲均衡算法和DDLMS算法結合起來的核心思想是切換或加權,其中切換雙模式盲均衡算法通過對每一次的誤差進行閾值判斷來選擇對應的模式。然而該算法只有一個判決閾值,普適性差,容易導致算法不收斂或者收斂非常慢。加權雙模式盲均衡算法兼顧兩種不同算法誤差的誤差函數,可以改善算法收斂性能,但是計算復雜度增加。
由以上分析可知,近年來提出的并行雙模式算法復雜度高,傳統的切換雙模式算法和加權雙模式算法各有優缺點。因此,為了提高均衡器的收斂性能,降低均衡器的計算復雜度,本文綜合切換雙模式盲均衡算法和加權雙模式盲均衡算法的優缺點,提出一種切換、加權模式聯合的CMA+DDLMS雙模式盲均衡算法。仿真結果表明,新算法具有更快的收斂速度、更小的剩余誤差,以及在不同信噪比情況下都具有更小的誤碼率。
1 CMA+DDLMS雙模式盲均衡算法
由于CMA算法和MCMA算法屬于Bussgang類盲均衡算法,它們都具有較大的穩態誤差和較慢的收斂速度,因此,CMA和MCMA聯合并不會提高均衡性能。此外,MCMA算法只可以糾正具有同相和正交兩路信號獨立分解特性的調制信號的相偏,無法糾正8PSK、16APSK等調制信號的相偏,且該算法比CMA算法實現復雜。因此,本文基于信號相偏糾正能力、收斂速度和穩態誤差等綜合考慮,選擇CMA和DDLMS相聯合的雙模式盲均衡算法,其原理圖如圖1所示。
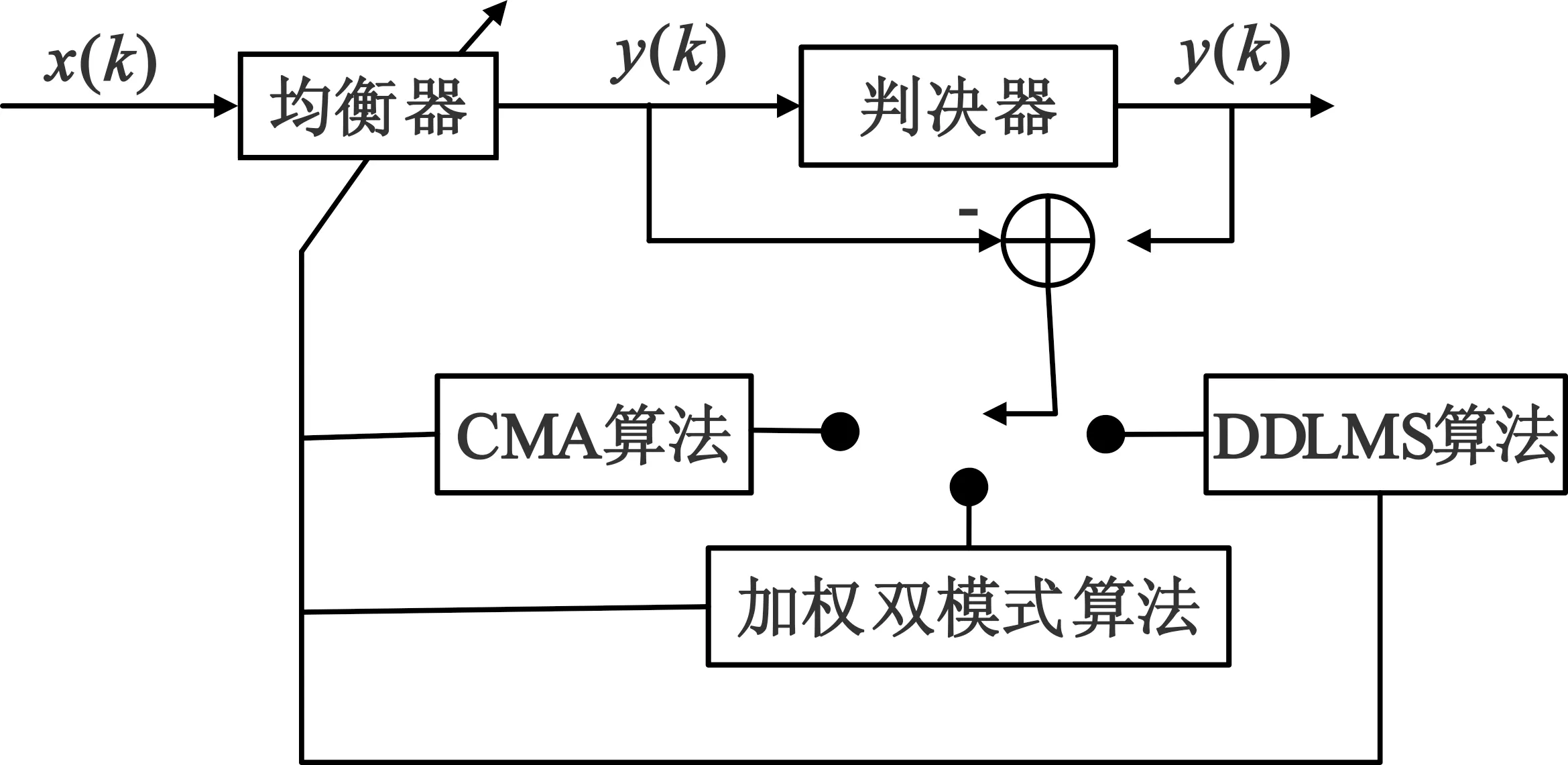
圖1 CMA+DDLMS雙模式盲均衡算法原理圖
CMA+DDLMS雙模式盲均衡算法的工作原理是:首先設置兩個判決閾值Rmax和Rmin;當DDLMS算法誤差的絕對值|eDDLMS(k)|≥Rmax,選擇CMA算法;當|eDDLMS(k)|≤Rmin,選擇DDLMS算法;當Rmin≤|eDDLMS(k)|≤Rmax,選擇加權雙模式盲均衡算法。
CMA+DDLMS雙模式盲均衡算法的誤差信號為
e(k)=

(1)
式中:μcma、ecma(k)分別是CMA算法的步長因子和誤差函數;μDDLMS、eDDLMS(k)分別是DDLMS算法的步長因子和誤差函數。
加權函數g(k)的定義為
(2)
式中:γ是常數,用于調節加權函數g(k)。
該加權函數是與DDLMS算法誤差有關的非線性函數,|eDDLMS(k)|越接近Rmax,g(k)就越大,此時加權雙模式算法誤差中CMA誤差所占比重更大;|eDDLMS(k)|越接近Rmin,g(k)就越小,此時加權雙模式算法誤差中DDLMS誤差所占比重更大。該加權函數可使得切換模式和加權模式之間的連接更平滑,可有效結合兩種模式的優點。
均衡器抽頭系數的更新方程為
w(k+1)=w(k)-e*(k)x(k)。
(3)
式中:w(k)為自適應濾波系數向量,x(k)為均衡器輸入序列,e*(k)表示為e(k)取復共軛。
CMA算法的步長因子比DDLMS算法的步長因子小兩個數量級,CMA+DDLMS雙模式盲均衡算法采取固定步長因子,若步長因子選擇不當,會對CMA+DDLMS雙模式盲均衡算法的收斂造成嚴重影響,因此,需經過多次仿真找出最佳步長因子。此外,γ、Rmax和Rmin的取值對雙模式盲均衡算法的均衡性能和計算復雜度有一定的影響,需要根據不同信道和噪聲特性尋找出合適的取值。
2 均衡算法仿真與結果分析
為驗證改進算法在衛星通信系統中盲均衡的性能,模擬衛星通信信道對CMA算法、MCMA算法、DDLMS算法和CMA+DDLMS雙模式盲均衡算法進行仿真,其具體實現框圖如圖2所示,CMA+DDLMS雙模式盲均衡算法流程圖如圖3所示。其中仿真采取8PSK調制方式;信道為典型多徑信道加高斯白噪聲信道,信噪比為25 dB;根升余弦濾波器的滾降系數是0.5,截斷的符號范圍是8,每個符號輸出采樣點個數是4;CMA+DDLMS雙模式盲均衡算法中CMA算法步長μcma為0.001 9,DDLMS算法步長μDDLMS為0.01,判決閾值Rmax=0.85,Rmin=0.15,加權調節系數γ=9。
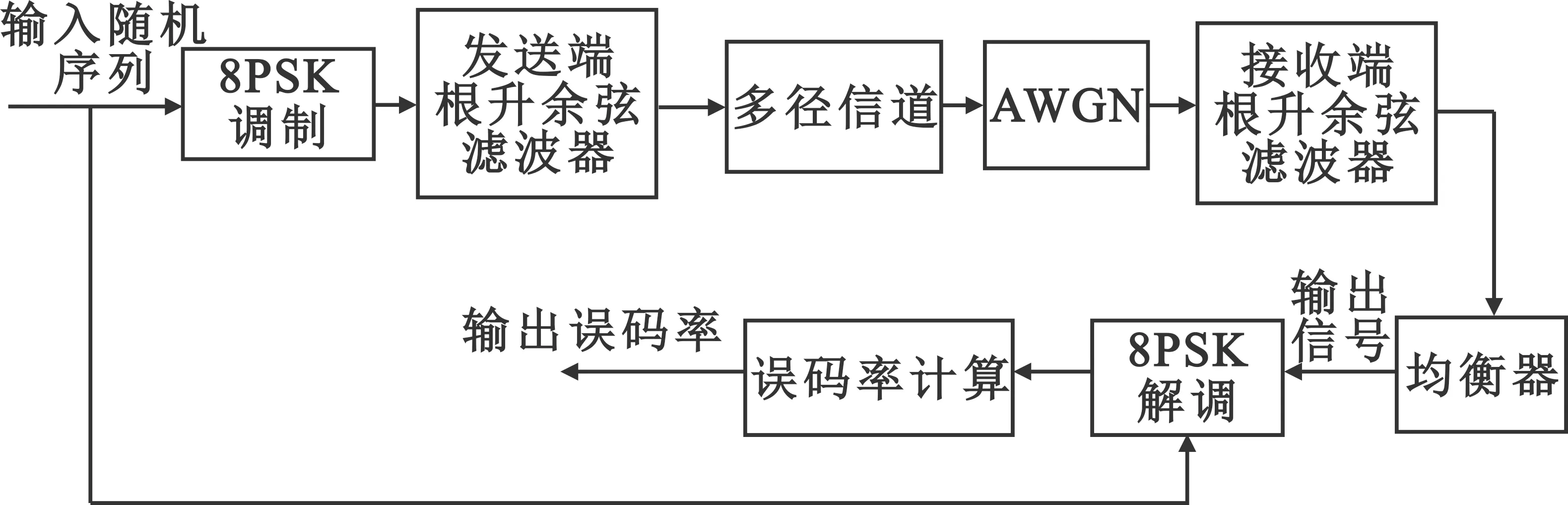
圖2 仿真實現框圖
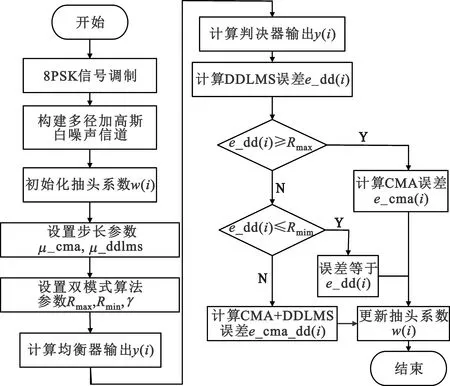
圖3 CMA+DDLMS雙模式盲均衡算法流程圖
2.1 不同均衡算法仿真結果
對應無均衡算法和采取不同均衡算法的信號星座圖如圖4所示,采取不同均衡算法的剩余誤差圖如圖5所示。
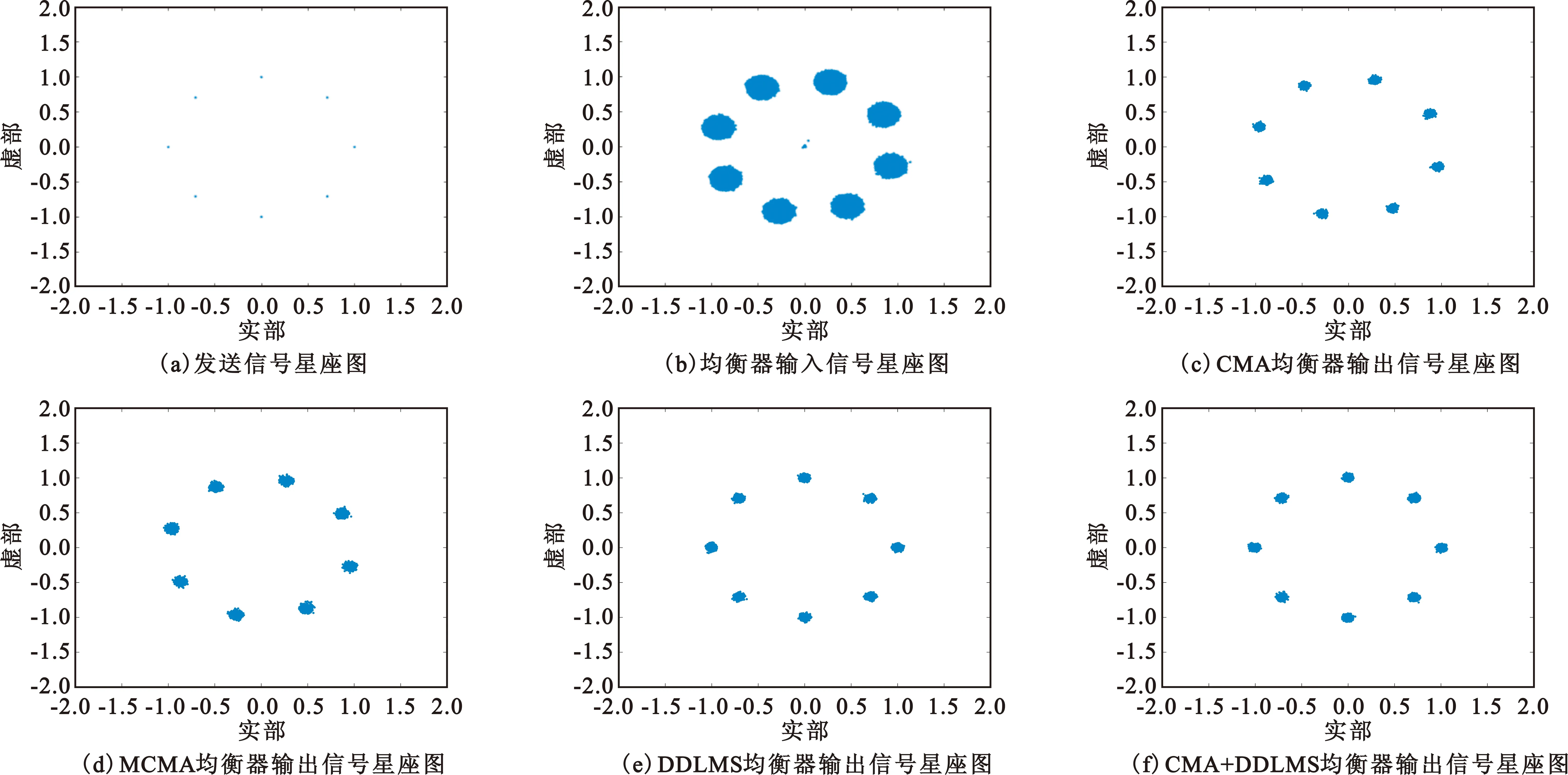
圖4 信號星座圖
(a)CMA
(b)MCMA
(c)DDLMS
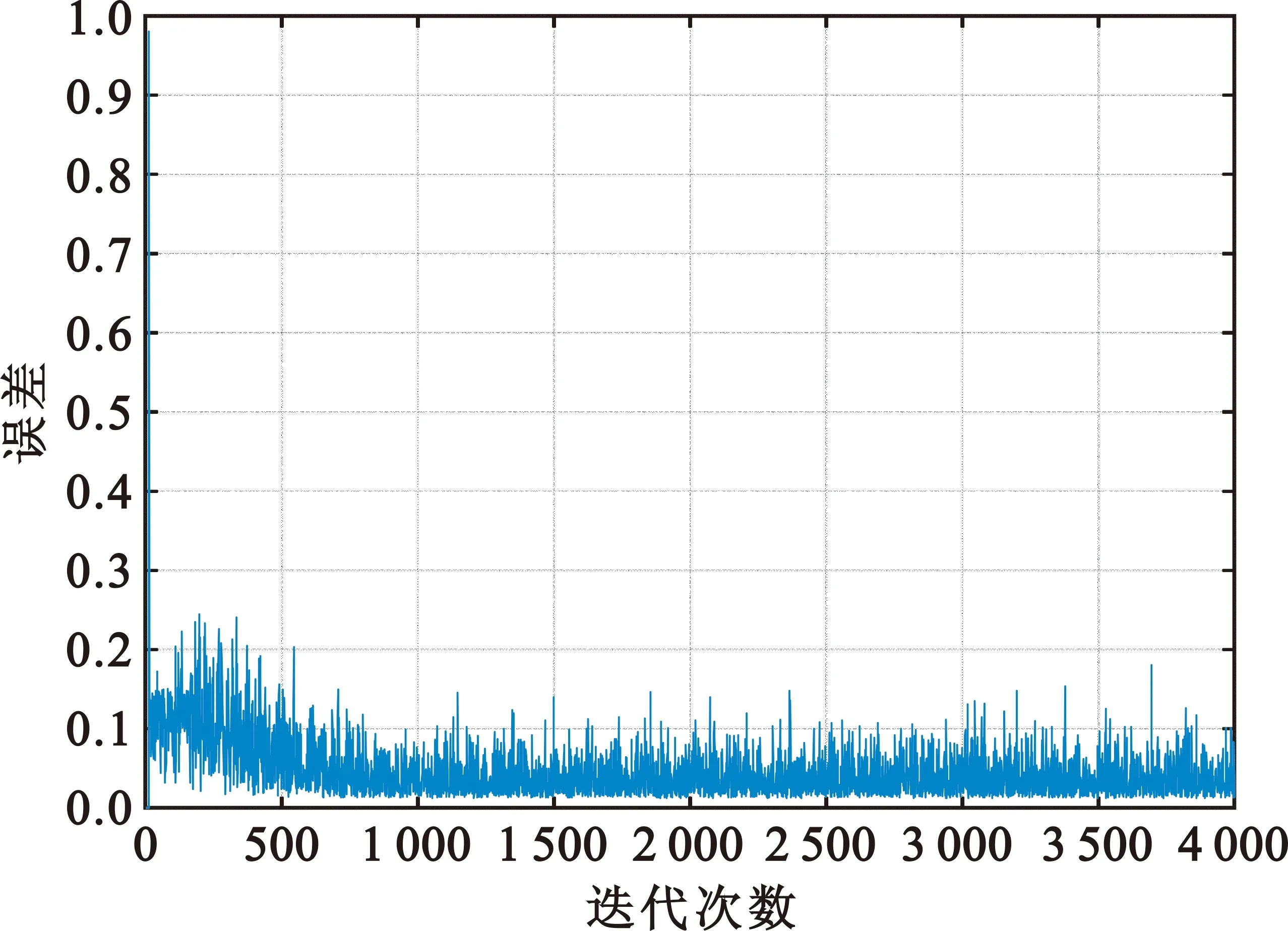
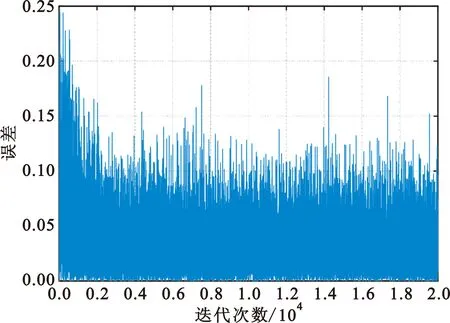
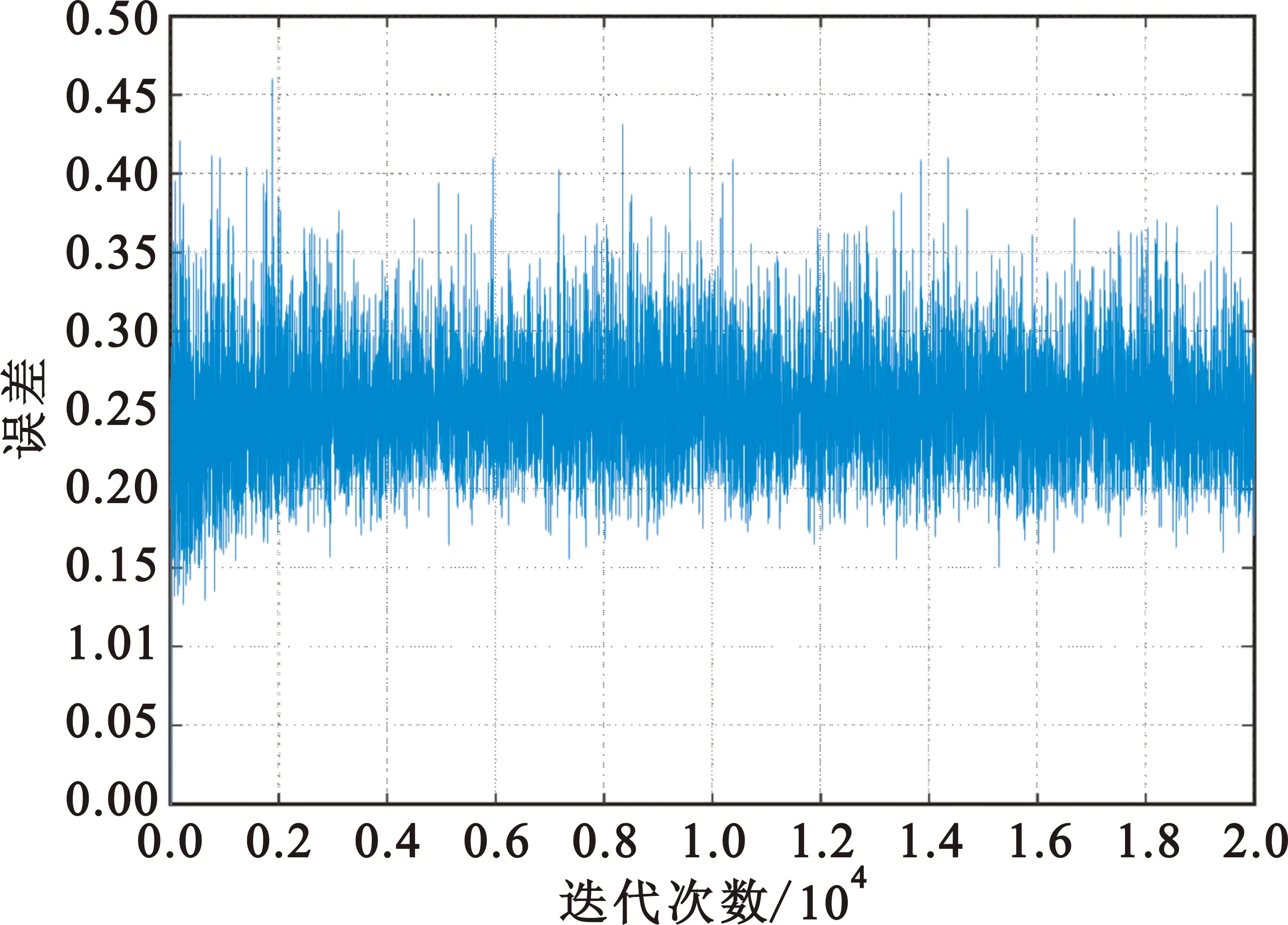
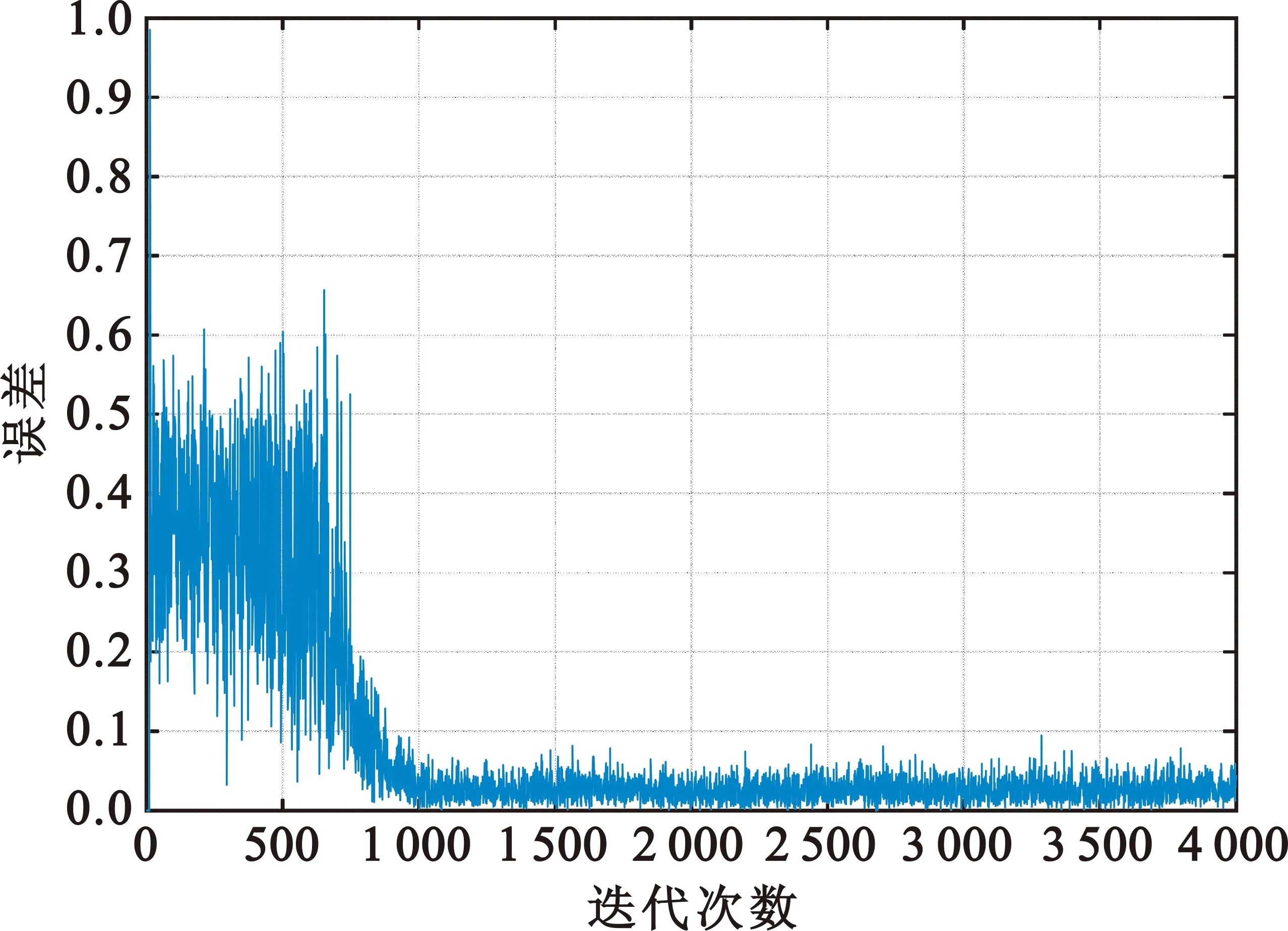
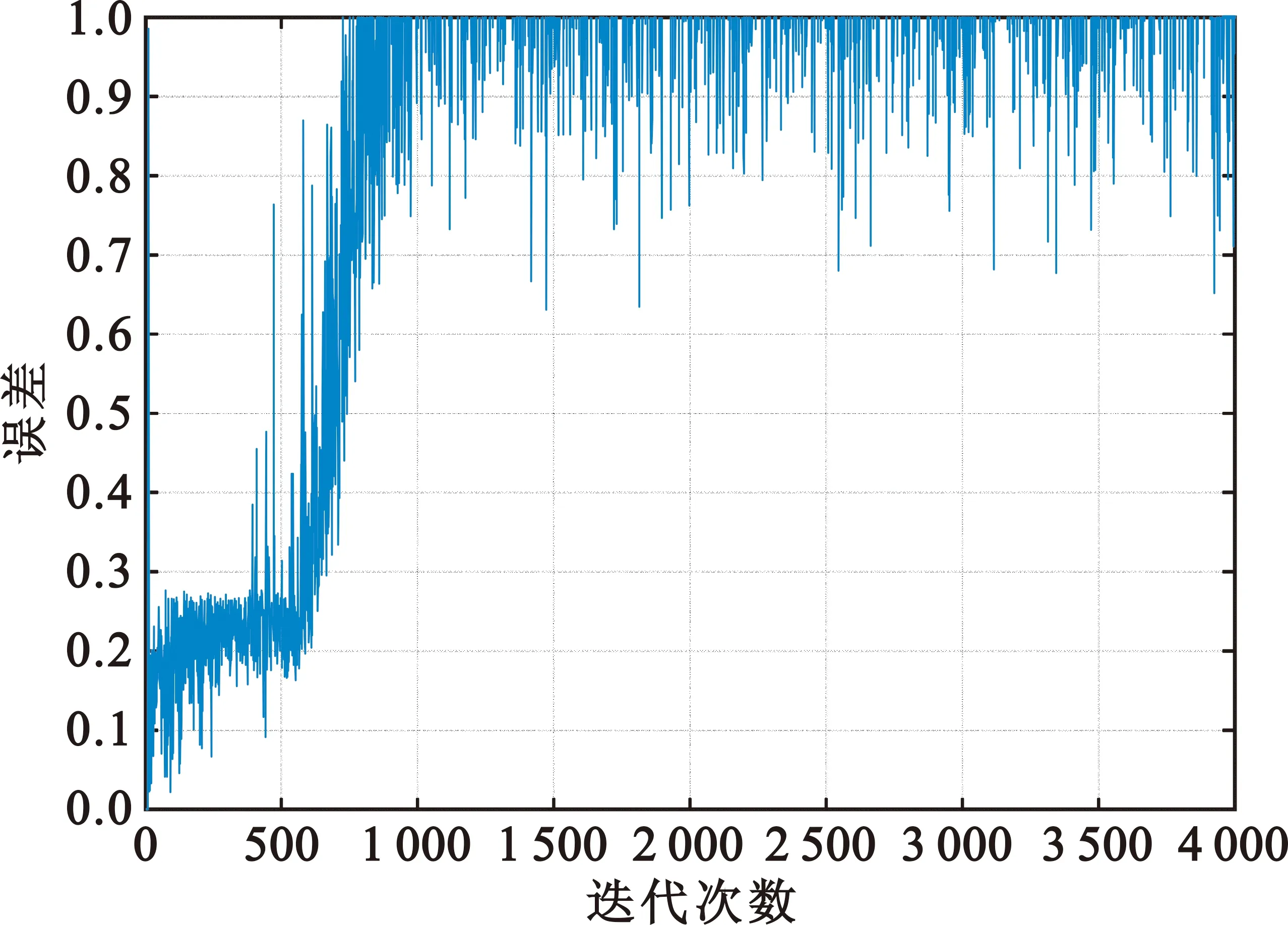
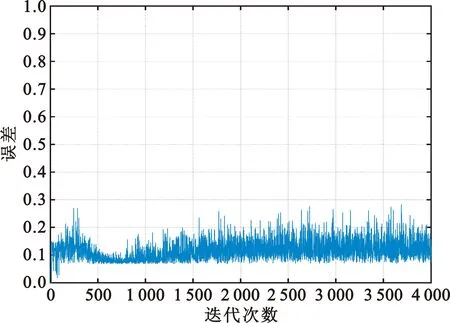
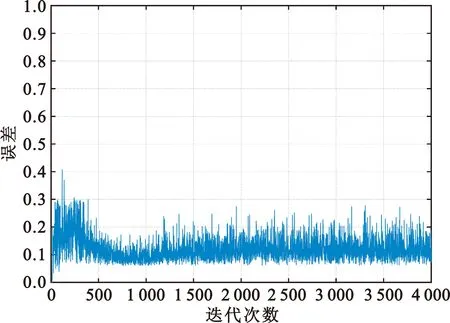
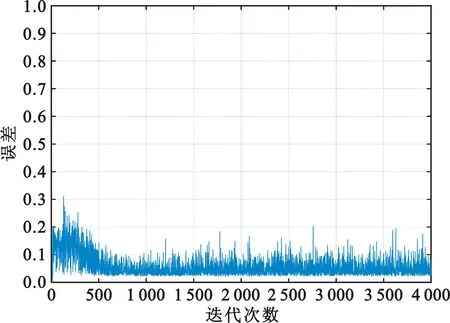
(d)CMA+DDLMS圖5 不同算法的誤差收斂曲線
從圖4(a)和圖4(b)中可以看出,發射信號在經過衛星通信信道傳輸后出現了明顯的碼間干擾,且產生了相位偏移,使得其星座圖發散、扭曲,難以判決。從圖4(c)~(f)可以看出,經過均衡后的信號星座圖較為集中,效果遠好于未采取均衡算法的信號。其中,CMA+DDLMS雙模式算法均衡后的信號星座圖收斂情況最好,DDLMS算法次之,CMA算法和MCMA算法均存在相位偏移。
從圖5(a)可知,CMA算法仿真大概2 000個符號后誤差趨于穩定,穩態誤差值約為0.14;從圖5(b)可知,MCMA算法仿真大概3 000個符號后誤差趨于穩定,穩態誤差值約為0.35;從圖5(c)可知,DDLMS算法仿真大概1 000個符號后誤差趨于穩定,穩態誤差值約為0.06;從圖5(d)可知,CMA+DDLMS雙模式算法仿真大概600個符號后誤差趨于穩定,穩態誤差值約為0.1。由此可知,CMA+DDLMS雙模式算法收斂速度最快,其穩態誤差值只比DDLMS算法略大0.04。
2.2 CMA+DDLMS雙模式算法參數性能分析
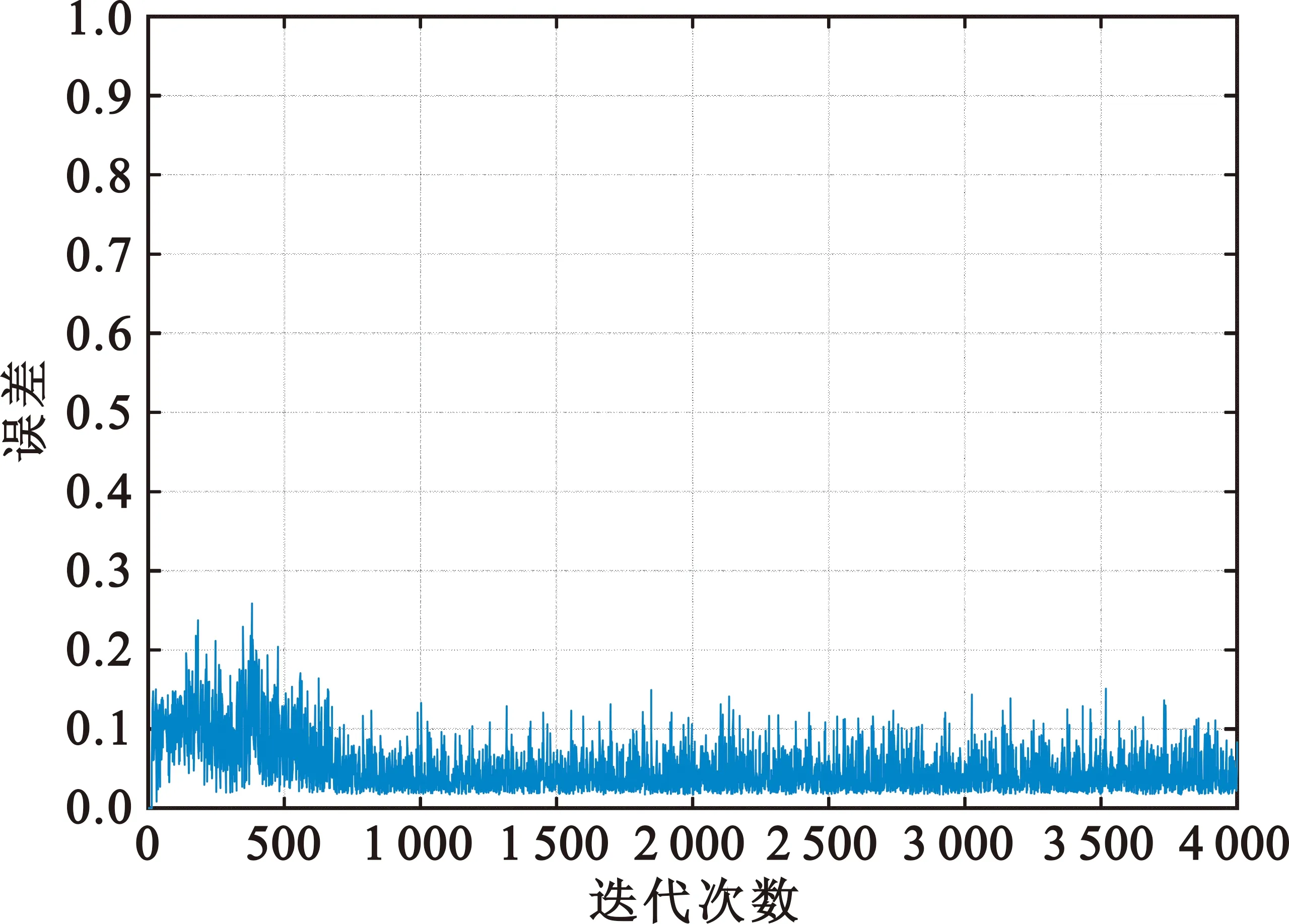
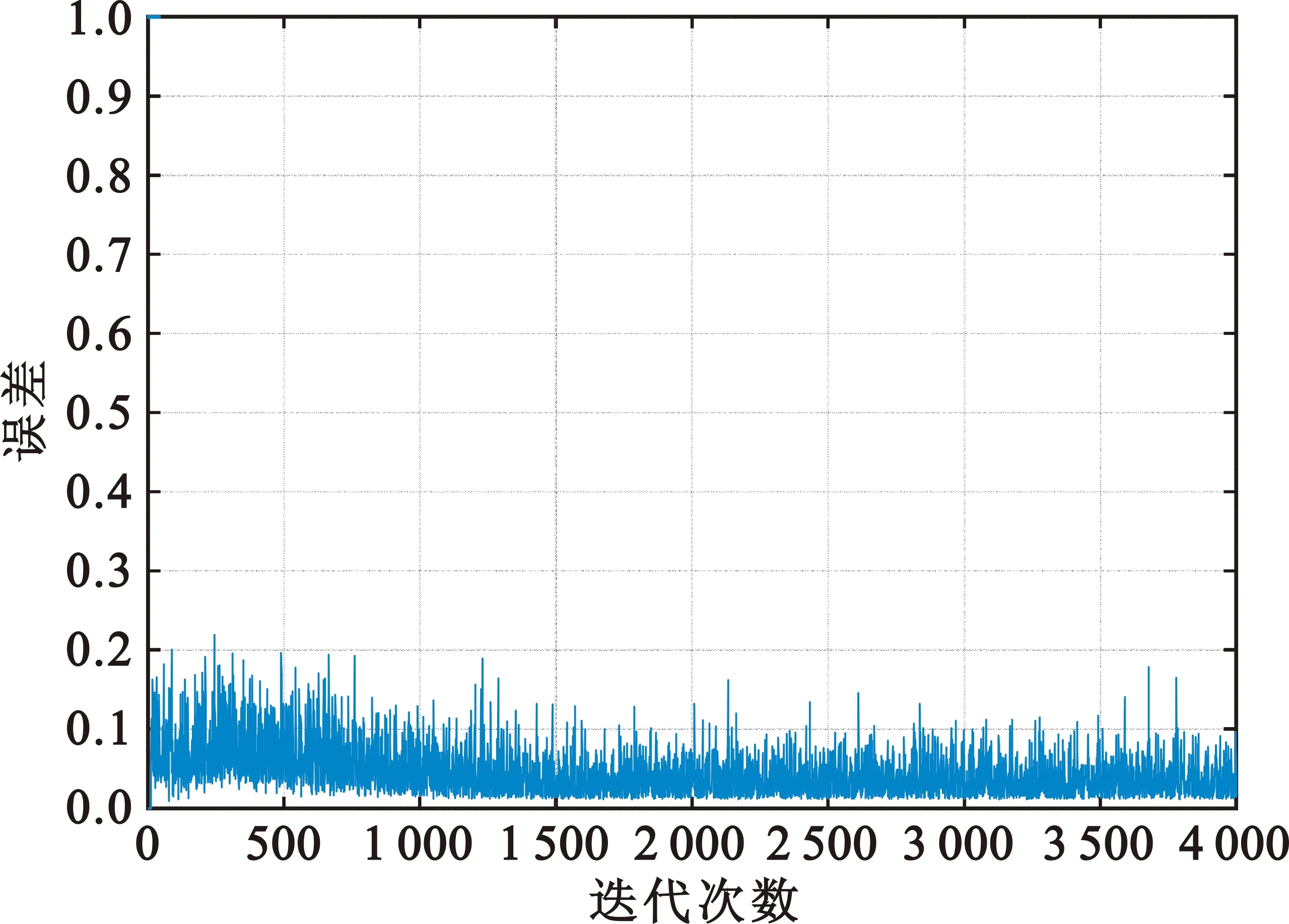
兩個判決閾值Rmax、Rmin和調節系數γ的取值對CMA+DDLMS雙模式盲均衡算法的均衡性能和計算復雜度有較大的影響。因此,為研究它們是如何取得最佳值的,給出固定判決閾值Rmax=0.85和Rmin=0.15、只改變調節系數γ時的算法誤差收斂曲線,如圖6所示,其中圖6(c)與圖5(d)為相同情況下的仿真。此外,固定調節系數γ=9,只改變判決閾值Rmax和Rmin時的算法誤差收斂曲線如圖7所示。
從圖6(a)可知,γ=1時,CMA+DDLMS雙模式盲均衡算法不收斂;從圖6(b)可知,γ=5時,CMA+DDLMS雙模式算法仿真大概1 500個符號后誤差趨于穩定,穩態誤差值約為0.2,收斂速度較慢,穩態誤差值大;從圖6(c)可知,γ=9時,CMA+DDLMS雙模式算法仿真大概600個符號后誤差趨于穩定,穩態誤差值約為0.1,收斂速度快,穩態誤差值小;從圖6(d)可知,γ=15時,CMA+DDLMS雙模式盲均衡算法仿真大概600個符號后誤差趨于穩定,穩態誤差值約為0.1,收斂性能與γ=9時相近。因此可知,γ值過小,會導致不收斂或穩態誤差過大;γ值過大,性能無明顯提升,且會增加計算復雜度。因此,基于均衡性能和計算復雜度考慮,選取γ=9。
(a)γ=1
(b)γ=5
(c)γ=9
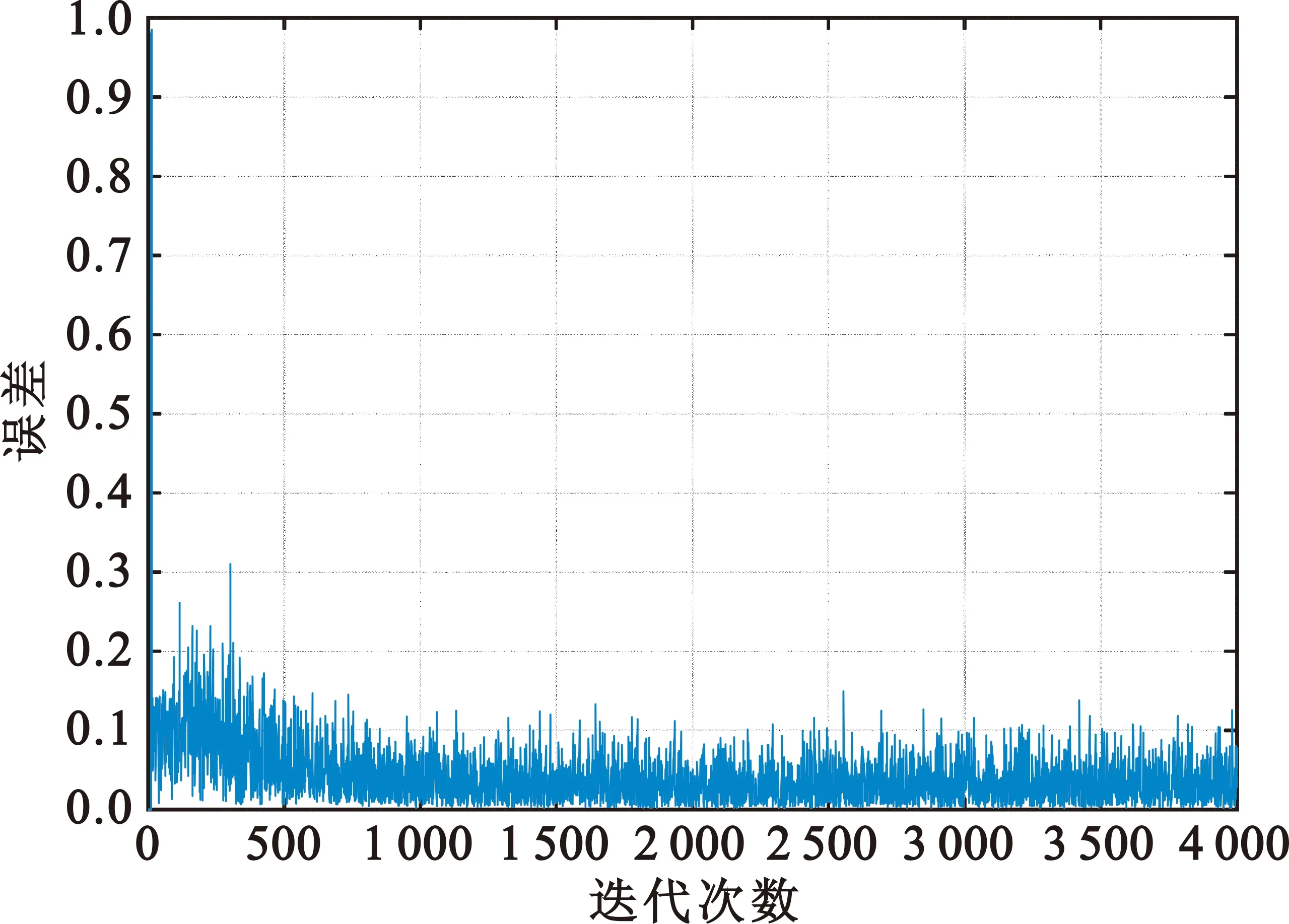
(d)γ=15圖6 不同調節系數γ時CMA+DDLMS算法誤差收斂曲線

(a)Rmax=0.6,Rmin=0.4
(b)Rmax=0.7,Rmin=0.3
(c)Rmax=0.8,Rmin=0.2
(d)Rmax=1,Rmin=0圖7 不同判斷閾值下CMA+DDLMS算法誤差收斂曲線
從圖7(a)可知,Rmax=0.6、Rmin=0.4時,CMA+DDLMS雙模式算法無法收斂;從圖7(b)可知,Rmax=0.7、Rmin=0.3時,CMA+DDLMS雙模式算法仿真大概1 300個符號后誤差趨于穩定,穩態誤差值約為0.2,收斂速度較慢,穩態誤差值大;從圖7(c)可知,Rmax=0.8、Rmin=0.2時,CMA+DDLMS雙模式算法仿真大概1 200個符號后誤差趨于穩定,穩態誤差值約為0.13,收斂速度較快,穩態誤差值較小;從圖6(c)可知,Rmax=0.85、Rmin=0.15時,CMA+DDLMS雙模式算法仿真大概600個符號后誤差趨于穩定,穩態誤差值約為0.1,收斂速度快,穩態誤差值小。從圖7(d)可知,Rmax=1、Rmin=0時,CMA+DDLMS雙模式算法仿真大概1 500個符號后誤差趨于穩定,穩態誤差值約為0.1,收斂性能與Rmax=0.85、Rmin=0.15時相近,然而此時由于Rmax過大、Rmin過小,會一直處于加權模式,計算復雜度增大。因此可知,Rmax過小、Rmin過大,會導致不收斂或穩態誤差過大;Rmax過大、Rmin過小,性能無明顯提升,且會增加計算復雜度。因此,基于均衡性能和計算復雜度考慮,選取Rmax=0.85,Rmin=0.15。
由以上分析可知,本文最終確定該算法中Rmax=0.85,Rmin=0.15,γ=9。此外,從圖6(c)中可知,在Rmax=0.85、Rmin=0.15、γ=9的情況下,CMA+DDLMS雙模式算法在仿真600符號后誤差即降低至0.15以下,說明該算法的仿真主要是在DDLMS算法模式,加權模式持續時間很短。此外,由于DDLMS算法復雜度較低,因此,計算復雜度并未有較大增加。
2.3 不同均衡算法誤碼率性能對比
按照圖2,基于前面的仿真條件,即CMA+DDLMS雙模式盲均衡算法的判決閾值Rmax=0.85,Rmin=0.15,加權調節系數γ=9,在不同信噪條件下,對無均衡、CMA算法、MCMA算法、DDLMS算法和CMA+DDLMS雙模式盲均衡算法進行仿真,得到無均衡以及不同均衡算法的誤碼率曲線如圖8所示。
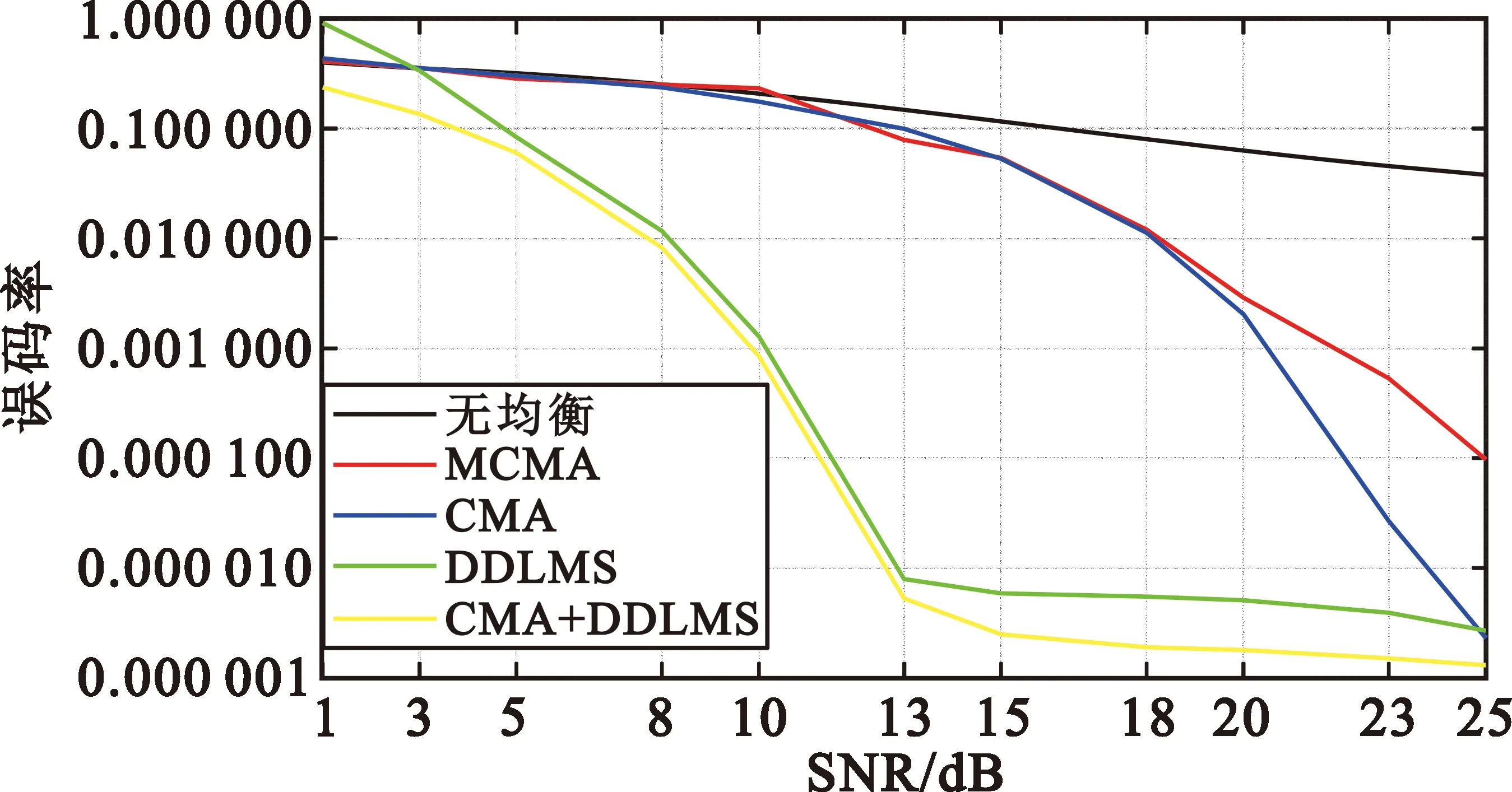
圖8 四種算法誤碼率曲線對比
由圖8可知,加均衡算法誤碼率性能優于無均衡算法誤碼率性能,且在不同信噪比條件下,CMA+DDLMS雙模式盲均衡算法誤碼率性能優于DDLMS算法誤碼率性能,DDLMS算法誤碼率性能優于CMA算法誤碼率性能,CMA算法誤碼率性能優于MCMA算法誤碼率性能。其中,在25 dB信噪比時CMA+DDLMS雙模式盲均衡算法誤碼率約為10-6,優于DDLMS算法,且在信噪比大于13 dB時,CMA+DDLMS雙模式盲均衡算法誤碼率均小于10-5。因此,CMA+DDLMS雙模式盲均衡算法在低信噪比條件和高信噪比條件下性能都是最優的。
3 結束語
本文提出了一種切換模式和加權模式聯合的CMA+DDLMS雙模式盲均衡算法。該算法綜合了CMA+DDLMS切換雙模式算法和CMA+DDLMS加權雙模式算法的優點,提高了切換雙模式均衡算法的收斂性能,改善了加權雙模式均衡算法計算復雜度高等問題。基于8PSK調制解調平臺模擬衛星通信信道,對不同均衡算法進行仿真,結果表明,相比于CMA算法和MCMA算法,CMA+DDLMS雙模式算法收斂速度更快,穩態誤差更小,且具有糾正相位偏移的能力;相比于DDLMS算法,CMA+DDLMS雙模式算法收斂速度更快。在不同信噪比條件下,CMA+DDLMS雙模式算法相比于CMA算法、MCMA算法和DDLMS算法,誤碼率更小。接下來將對該算法的實現復雜度做進一步的優化。
猜你喜歡
ELLE世界時裝之苑(2024年5期)2024-05-14 16:00:39
中學生數理化·七年級數學人教版(2021年10期)2021-11-22 07:53:00
幼兒園(2021年6期)2021-07-28 07:42:14
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
散文詩(2017年17期)2018-01-31 02:34:20
小學生學習指導(低年級)(2018年3期)2018-01-31 02:19:05
小學生導刊(2017年13期)2017-06-15 20:29:38
哈爾濱師范大學自然科學學報(2015年1期)2015-04-19 06:55:26
天津科技大學學報(2015年4期)2015-04-16 04:55:11
科普童話·百科探秘(2014年5期)2015-03-09 09:07:41
