
智能網聯汽車路徑跟蹤控制器設計中模型預測的應用
2021-02-28 06:49:56德州職業技術學院寇春欣
電子世界 2021年22期
德州職業技術學院 寇春欣
為了提高智能網聯汽車在運動過程中的精確度,文章基于模型預測原理對智能網聯汽車路徑跟蹤控制器進行了分析、設計和仿真,仿真結果表明,該控制器具有更好的靈活性,能夠根據不同運行工況控制車輛,達到較高的跟蹤精度和行駛穩定性,并為后續的研究提供重要的依據。
在國家大力發展先進制造業的背景下,智能網聯汽車的研發設計成為汽車行業的重點研究方向。為了實現智能網聯汽車的安全高效,對其路徑跟蹤控制器進行優化設計就成為了一項研究重點,通過該設備智能網聯汽車就能夠實現精準快速的主動轉向行為,對解決各種路況下的車輛行進問題有著重要的作用。為此,仍需對這方面做進一步的研究。
1 車輛模型的構建
在本次路徑跟蹤控制器設計中,采用有著廣泛應用的車輛二自由度單軌模型,且具有非線性輪胎力。在該單軌模型中,具有以下幾點假設條件:(1)車輛始終在平整路面上行駛;(2)車輛的載荷轉移和滑移情況不予考慮;(3)縱向驅動力的作用點為車輛的重心處。
為確保模型在滿足實際要求的情況下計算精度盡可能高,設計人員通常會采用簡化后的Pacejka輪胎模型,該模型的方程如式(1):

在該方程中,BR,CR,DR,BF,CF,DF的參數均通過實驗確定,αF和αR則分別為前輪和后輪的側偏角。
在基本模型構建完成后,為進一步提高精準度以獲得高性能的控制器,還需要對輪廓誤差進行分析計算。在這個環節中,首先要建立約束條件,約束條件主要包括控制量約束、增量約束、輪胎側偏角約束和路面附著條件約束等車輛動力學相關內容。
一是對輪胎側偏角進行約束,根據輪胎本身的性質,當輪胎側偏角低于5°時,側偏角和側偏力之間存在線性關系,超過5°后則呈現非線性相關。根據小角度約束原理,前輪側偏角的約束條件設定為[-2°,2°]。
二是對附著條件進行約束。路面的附著系數會在一定程度上影響汽車動力性能的發揮,特別是當路面附著條件惡劣時,車輛的動力性能會受到嚴重的限制;同時,如附著條件約束限定過小,還容易導致控制器的計算出現嚴重失真。為此,在本次研究中,設定路面附著系數為“軟約束”,路面附著條件計算中存在一個松弛因子,路面附著條件約束則位于[ay,min-,ay,max+]之間。
在確定約束條件后,即可將車輛路徑進行擬合,構建三階樣條多項式,通過求解該多項式即可得到參考路徑上任一點的坐標。當然,這個坐標值和實際位置難免存在誤差,該誤差通過方程進行計算。
2 路徑跟蹤控制器的原理及組成
2.1 基本原理
在路徑跟蹤控制器工作時,其首先根據系統預測模型對一定時間段內的車輛運行狀態進行控制,而后根據誤差函數得到最優控制率。這一工作周期循環往復運行,以實現對智能網聯汽車運行路徑的持續優化。
2.2 控制器的組成
在本次設計中,采用MPC控制器作為路徑跟蹤控制器的主要模塊,MPC控制器中集成了MPC算法,其包括預測模型、反饋校正、滾動優化這三個要素。由于其僅需計算標準的QP二次型即可解決系統輸入限制,因此MPC控制器的應用也較為廣泛。具體來看,其在運行過程中,首先會根據預測模型和當前的車輛運行狀態,對預測周期內車輛運行的所有可能狀態進行預測。在此基礎上,該算法會生成包括預測誤差在內的優化函數,最后在約束條件下對該優化函數進行求解,即可計算出最優控制輸入,并以此來控制預測周期內的車輛運行路徑。該運行呈現周期性的循環往復,如此即實現了“滾動優化”。
2.3 控制參數的選擇
在模型預測控制器設計中,需要對采樣時間、預測時域和控制時域進行設計。在不同的情況下,這三個要素可能會出現變化,特別是車速的變化對這三個要素的影響更為明顯,因此本次研究中針對不同的運行速度,采用不同的控制時域和預測時域,并對采樣時間進行相應修改。
為確保路徑跟蹤控制器在中低速和高速情況下均能起到預期效果,在本次研究中,分別考慮了這兩種運行工況,對其參數進行了分別選擇,如表1所示。
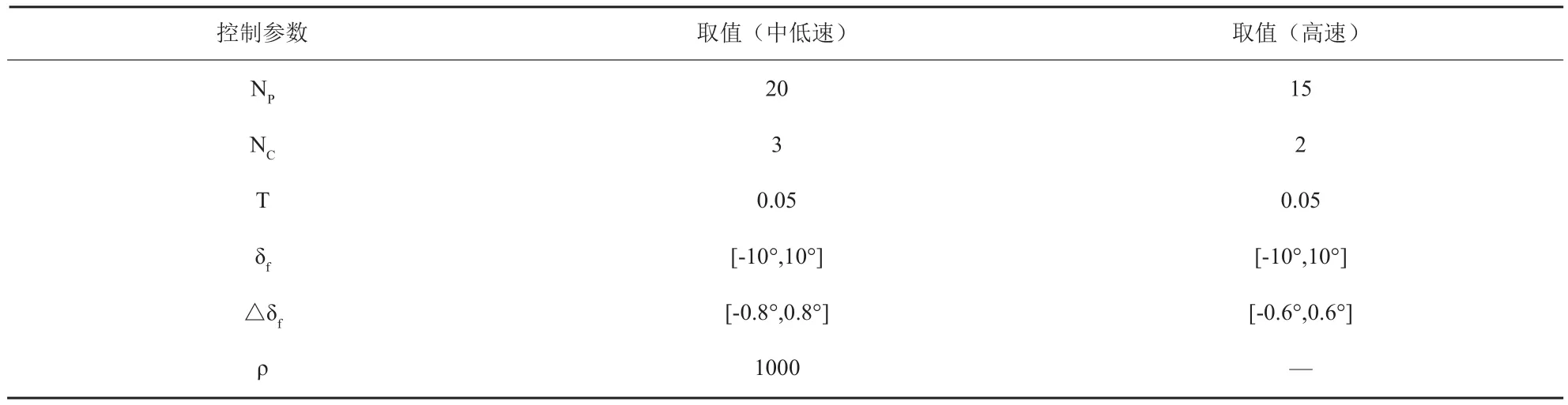
表1 控制器參數的選取
2.4 控制器的設計
控制器的設計主要通過MATLAB軟件進行。在本次研究中,將St函數設置為車輛路徑模型(亦可成為被控系統),該模型由四個微分方程組成,能夠輸出四個數據。該函數具有兩方面的作用,一是接收控制器的輸入,二是將控制器所需要的參數進行及時的反饋。控制器通過反饋即可得到當前時刻車輛運行軌跡的輸出參數,再利用微分模型和歐拉法,對預測周期內的未來運行軌跡進行預判,得到未來最優控制量。對于其他的外界干擾因素,可用近似的模型加入到控制器所需要的預測模型當中;同時,為實現對轉向機構的保護,還需要在控制器中加入轉向角度的約束條件。
3 路徑跟蹤控制器虛擬仿真
為驗證路徑跟蹤控制器的實際效果,在本次研究中采用車輛模型為控制對象。基于上文的研究結果,在Carsim平臺和Matlab/Simulink平臺,對其進行聯合仿真。在仿真過程中,設計了直線路段、蛇形路段和雙移線路段三種路段,分別模擬實際運行時的不同工況;同時,車輛初始位置在坐標系原點,路面附著系數設置為0.85。
通過一系列的仿真實驗后發現,該控制器在車輛模型的中低速和高速工況下,其路徑跟蹤效果均較好,特別是在車輛以中等速度(50~60kph)運行時,其幾乎不存在軌跡跟蹤誤差。當然,在高速運行工況下,該控制器仍然在直線路段和彎道交叉點附近存在微小的誤差,局部誤差超過0.6m。分析誤差出現的原因,可能是由于該路段的過渡路程較短,且車速較高所致。
在車輛模型的運行過程中,車輛的前輪轉角、縱向加速度、橫擺角速度和質心側偏角的相關數值也出現了細微的抖動,通過理論分析,推斷是因縱向加速度過大,導致輪胎的側偏特性處于非線性區。
在本次仿真實驗測試中,測試結果如表2所示。
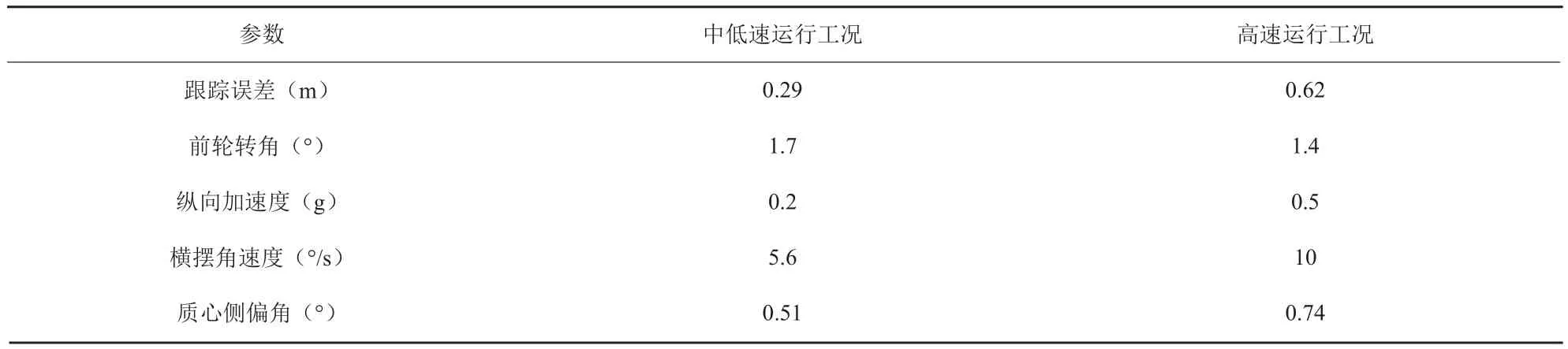
表2 不同工況下各狀態量絕對值對比
根據表2中的數據可知,各狀態量的絕對值大多數都處于合理范圍內,僅在高速狀態下的橫擺角速度略為偏大,通過分析發現,橫擺角速度偏大的情形主要出現在蛇行路段的頂點處,此處路徑彎曲程度過大,且車速也過高,屬于極特殊情況。整體來看,該控制器控制下的車輛模型能夠在日常的各種工況下保持良好的運行狀態,且控制器的跟蹤精度也較好。
結束語:在本次研究中針對智能網聯汽車的路徑跟蹤控制問題,提出了一種基于模型預測的智能網聯汽車路徑跟蹤控制器的設計方法,在設計中綜合考慮了汽車的不同運行工況,分別進行了針對性的設計,以確保其具備較高的跟蹤精度。對設計結果進行仿真后表明,本次設計的路徑跟蹤控制器效果相對較好,對后續的研究實驗具有一定的參考價值。當然,由于本次僅為仿真實驗,與真實路況仍有一定的差距,因此在今后的研究中仍需對此進一步完善。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
