虛擬仿真實驗在高校課程中的應用研究
2021-03-01 12:23:46陳鑫
科學與財富 2021年27期
摘 要:為提升本科人才的培養質量,激發學生對專業課程的學習興趣,優化學生實驗環境,方便線上學習,在高校中開展虛擬仿真實驗建設具有重要意義。虛擬仿真實驗教學可以改進教師的教學方法,培養科研能力,營造濃厚的專業學習氛圍,是一種值得推廣的方式。本文梳理本校的工業機器人仿真技術課程的虛擬仿真實驗的建設經驗,總結該實驗對我校學生創新能力培養的成果,為高校教師們提供借鑒的經驗。
關鍵詞:虛擬仿真實驗;培養方式;工業機器人
0引言
機器人搬運工作站是工業機器人領域的典型應用,機器人實體工作站占地面積大、成本高、管理和維護困難。另外,應用機器人系統集成及編程的實體工作站實驗存在投資較大、設備臺套數有限、實驗室面積緊張、實驗時間與教學實踐沖突、細微實驗現象難以細致觀察等實際問題。武漢商學院機器人工程專業《工業機器人仿真技術》課程采用虛擬仿真實驗來代替實體設備,該實驗項目的建設與行業領先的專業公司合作,采用Maya和VR技術對實驗場景、設備裝置、系統建模等高度仿真,實驗全程三維動畫,操作規范,3D實驗場景逼真,體驗感和交互性強,吸引了學生強烈的參與愿望,很大程度上激發了學生的學習熱情。
1虛擬實驗簡介
1.1玻璃清洗虛擬仿真實驗
玻璃清洗工作站離線編程虛擬仿真實驗以武漢商學院虛擬仿真實驗平臺為基礎,進行玻璃清洗機器人工作站虛擬構建、離線編程基本操作及機器人工作站運動仿真。采用“知識點”與“工程實踐”相結合的實驗教學方式,通過基礎部分、進階部分及工程案例實操的實驗教學設計,著重培養學生團隊合作能力、剖析工程案例能力及研究解決機器人系統集成實際工程問題的能力。
1.2虛擬實驗的建構
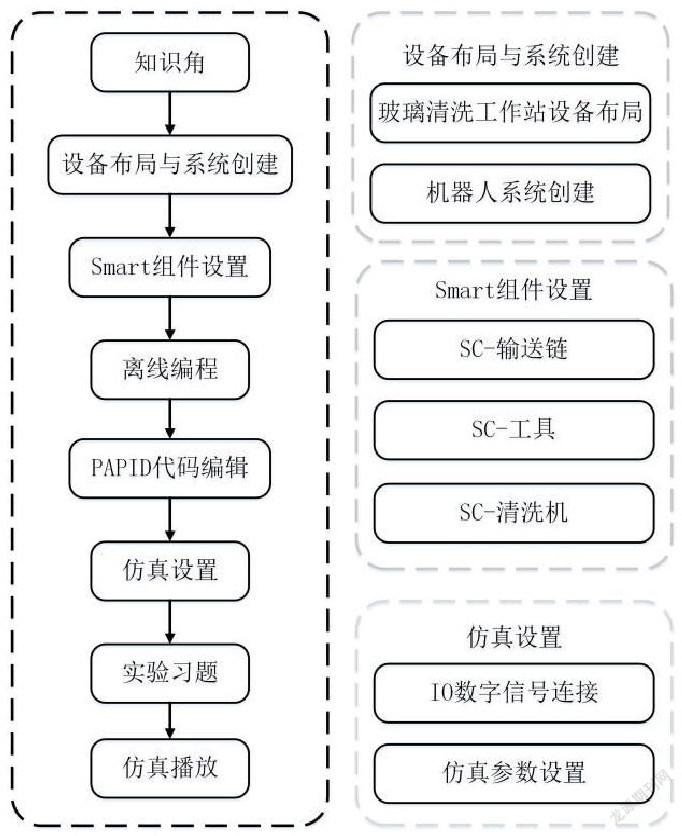
玻璃清洗工作站虛擬實驗教學設計遵循“三層銜接、能力進階”思路,三層銜接是指基本技能訓練、專業綜合訓練及業界實踐訓練。能力進階是指基本能力、專項能力及綜合能力的進階。主要包括構建基本仿真工業機器人工作站、RobotStudio中的建模功能等基礎教學部分、Smart組件的應用、在線編程等進階教學部分及玻璃清洗工作站編程工程實例操作三個部分。實驗的主體流程分為七步,如圖1所示。主要的實驗中的虛擬設備有:ABB IRB6700 1臺,負載200kg,到達能力2.6m,IRC5-Compact控制器1臺,帶示教器,SSX-5000輸送線1條,自動清洗機1臺,真空吸盤夾具1套,光柵 1臺,寬2100mm,圍欄4X6000mm,機器人底座 1個。
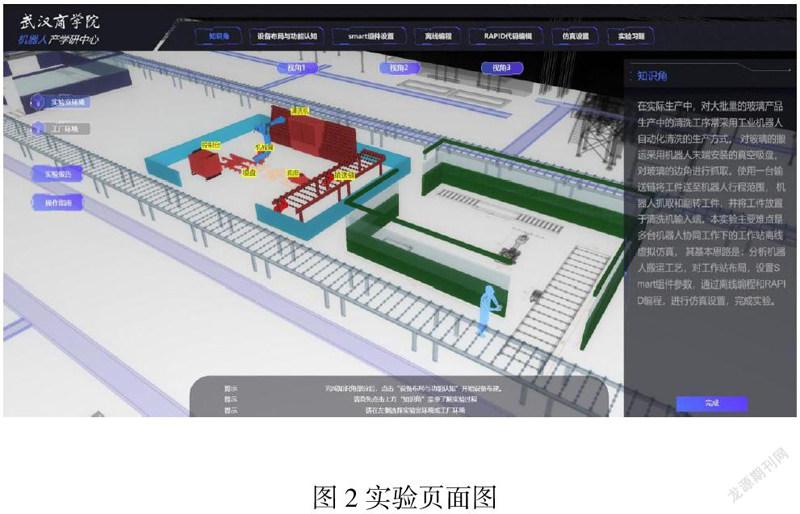
實驗的實驗操作流程如圖1所示。第一步,通過知識角讓學生了解本實驗背景和基本要求;第二步,通過設備布局和功能認知,搭建實驗系統創建控制系統;第三步,Smart組件的設置為虛擬設備的外部電氣控制的設置;第四步,離線編程是為工業機器人運動指令編輯前的目標點的選定;第五步。Rapid代碼是ABB機器人的指令編輯;第六步,仿真設置后即可實驗運動仿真;第七步,為本次實驗的習題。實驗界面如圖2所示。
2虛擬實驗的促進意義
2.1虛擬實驗對理論教學的促進
對我校應用型本科生而言,工業機器人仿真技術課程中采用虛擬仿真的實驗教學方法,是對傳統課程理論教學模式進行改革,減少課堂教學投入時間,加強實驗、實訓教學力度。理清供給與需求、知識與技能、職業與道德等層面的內在聯系,改革以前的教學觀念和教學方法,進一步完善機器人學科的課程教學方案。
2.2虛擬實驗對實踐教學的促進
本校機器人工程專業以培養高素質的機器人工程專業人才為目標,針對以真實機器人工作站為基礎的機器人實操實驗教學中存在的問題,結合機器人工程專業知識面廣、系統性強、與工程結合緊密等特點,在機器人虛擬仿真課程的實踐教學過程中,建立了以工程認知、表達、分析為主線,以代表性的生產線,如機器人焊接、機器人打磨、機器人清洗為對象的虛擬仿真實驗。采用虛擬實驗與理論教學相結合的教學模式,全面推進和提高學生實踐能力的培養。機器人專業的虛擬實驗建設旨在“以行業需求為牽引,以實驗教學與產業相協同”的教學理念,全面推進學生實踐能力培養。
2.3虛擬實驗對科研創新的促進
科學技術的發展日新月異,前沿技術、產品的更新周期也越來越短,相對于前沿技術來說,教材上的理論及實踐內容較為陳舊,如何實時把握最新動態,向學生傳遞科技前沿是非常緊迫的教學任務。教學設計中實驗方法與實驗現象相結合,可以極大拓展傳統實驗范圍。堅持“虛實結合”的原則,實驗內容選取當今社會發展對創新性和創業型機器人工程人才培養需求的高昂設備、不易操作的實驗,且嚴格履行工業機器人操作規程。傳統實驗中出于設備及人員安全考慮,其實驗類型及實驗工況單一。虛擬實驗中學生可在大范圍內修改實驗參數,并可觀測到對應的實驗現象,極大拓展了傳統實驗范圍。
3結語
本文對工業機器人仿真技術這門課知識點的講解緊密圍繞機器人仿真的理論,重視軟件實操,引入虛擬仿真實驗等新教學方法,能夠更加吸引學生參與式學習。同時,本文的研究也適用于從事工業機器人系統集成、工作站設計、現場調試的技術人員學習和參考。只有不斷改進課堂的教學方法,才能更好地提升學生的創新意識,培養學生的創新能力,增加學生的綜合素質。
參考文獻:
[1]陳萍,周會超,周虛. 構建虛擬仿真實驗平臺,探索創新人才培養模式[A]. 北京高校實驗室工作研究會.北京高校實驗室工作研究會2010年年會優秀論文[C].北京高校實驗室工作研究會:北京市高等教育學會,2011:4.
[2]Boaz Arad,Jos Balendonck,Ruud Barth,Ohad Ben‐Shahar,Yael Edan,Thomas Hellstr?m,Jochen Hemming,Polina Kurtser,Ola Ringdahl,Toon Tielen,Bart Tuijl. Development of a sweet pepper harvesting robot[J]. Journal of Field Robotics,2020,37(6):
[3]JaeHyeon Gwon,Hyeon Kim,HyunSoo Bae,SukGyu Lee. Path Planning of a Sweeping Robot Based on Path Estimation of a Curling Stone Using Sensor Fusion[J]. Electronics,2020,9(3):
[4]鮑清巖,毛海燕,湛年遠等. 工業機器人仿真應用[M].重慶大學出版社, 201809.221.
[5]呂明珠.基于Robotmaster的工業機器人虛擬仿真實驗平臺設計[J].電氣開關,2017,55(06):20-23.
作者簡介:
陳鑫(1988-),湖北武漢人,講師。主要研究方向為機器人仿真技術,機器人系統集成。
基金項目:武漢商學院2021年校級教學改革研究項目(項目編號:2021Y011)。
