探傷車超聲波檢測系統基準靈敏度確定方法
2021-03-01 15:48:00張玉華馬運忠李培鐘艷春熊龍輝
鐵路技術創新 2021年6期
關鍵詞:檢測
張玉華,馬運忠,李培,鐘艷春,熊龍輝
(中國鐵道科學研究院集團有限公司 基礎設施檢測研究所,北京 100081)
0 引言
探傷車用于在役鋼軌內部疲勞裂紋檢測,檢測速度最高可達80 km/h,傷損檢出性能受檢測靈敏度、鋼軌表面狀態、檢測速度等因素影響,在檢測過程中操作員需根據檢測過程中超聲波波形對檢測靈敏度進行動態調整。檢測靈敏度過高,檢測數據中的雜波增加,傷損誤報增加。檢測靈敏度低于基準靈敏度,可能會漏檢。在探傷車運用管理辦法中,對探傷車在人工傷損標定線上的檢測性能進行了規定,但由于標定線與實際線路表面狀態的差異,導致標定線上的檢測靈敏度難以準確地為實際線路檢測靈敏度提供參考。因此,基準靈敏度的確定一直是困擾操作人員的難題。石永生等[1-2]提出了高速鐵路探傷車動態靈敏度設置方法,將通道調出雜波再減3 dB作為檢測靈敏度,并提出探傷車檢測靈敏度設置應根據探傷儀檢測標準進行確定。趙波等[3]提出了在動態檢測時,以螺孔不同檢測速度和掃查間距下出現的合理回波點數為標準的動態檢測靈敏度設置方法。文獻[4-5]也從應用角度對檢測靈敏度設置進行了研究。以上方法對探傷車動態檢測靈敏度的設置提供了參考,但并未給出基準靈敏度的確定方法。因此,該研究在分析探傷車超聲波檢測系統傷損判讀原理的基礎上,提出不同檢測速度下探傷超聲波通道的基準靈敏度確定方法。
1 探傷車超聲波檢測系統傷損判讀原理
探傷車檢測采用超聲波反射原理進行檢測,同時對2根鋼軌進行檢測,超聲波換能器安裝在探輪內,單根鋼軌設計有3個探輪,共計15個超聲波通道。以45°超聲波通道為例,對探傷車傷損判讀原理進行說明。圖1(a)為45°超聲波通道在探傷車行進過程中對鋼軌軌腰斜裂紋進行的第①、②、③次掃查示意圖,3次掃查間距為Δh。若3次探測過程中,軌腰斜裂紋產生的超聲波回波均超過了45°超聲波通道監視閘門的閾值(見圖1(b)),利用檢測系統對超聲波回波的聲程進行測量,依據聲程計算出超聲波回波在鋼軌中的位置,采用B型顯示(B顯)的方式呈現給操作者。3次掃查的A型顯示(A顯)回波峰值均超過閾值(見圖1(c))。3次探測產生3個B顯中的回波點。操作員通過B顯圖形中回波點的數量和排列趨勢進行傷損判別。通常需要形成3個及以上的回波點,才可判斷檢測到傷損。探傷車行進過程中,超聲波通道對裂紋探測次數越多,在檢測靈敏度設置合理的情況下,回波點數越多,越有利于傷損判讀。
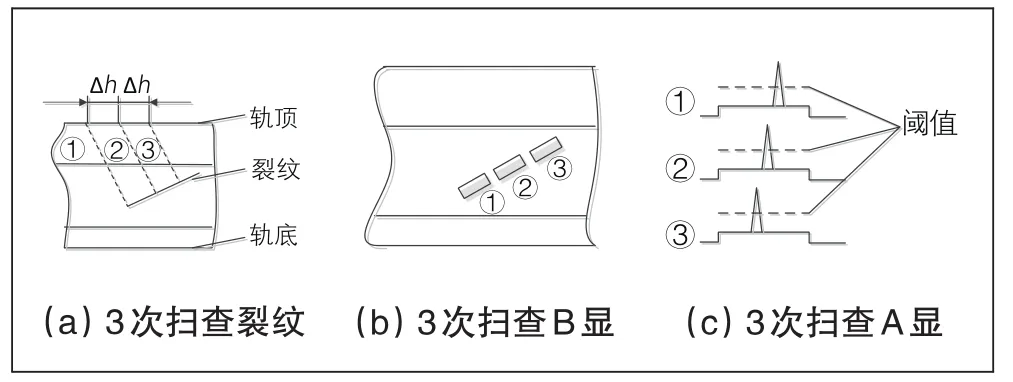
圖1 45°超聲波通道檢測軌腰斜裂紋示意圖
由圖1還可看出,對于特定的裂紋缺陷,超聲波通道探測次數與掃查間距Δh有關,而掃查間距Δh與探傷車行進速度密切相關。如在自主化探傷作業系統[6-8]中,掃查間距Δh與探傷車檢測速度的關系見表1。
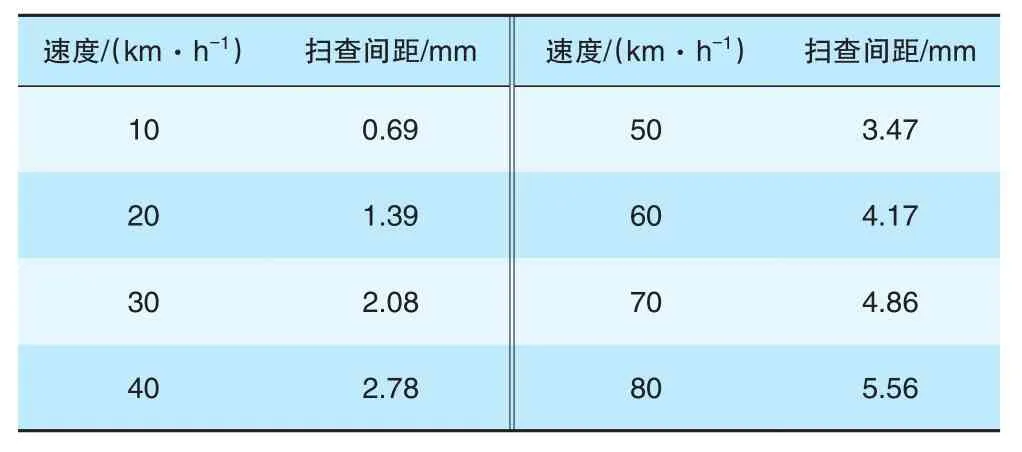
表1 超聲波掃查間距與探傷車行進速度關系
2 探傷車與探傷儀基準靈敏度異同
使用探傷儀進行檢測時,依據需要檢測的最小傷損進行基準靈敏度設置。設定超聲波通道的閘門和閾值,通常閾值設為探傷儀屏幕滿屏幅值的80%。當需要檢測的最小傷損的超聲波回波幅值達到閾值時的增益值為基準靈敏度,即檢測最低靈敏度。在探傷儀探傷過程中,檢測靈敏度設定值不允許低于基準靈敏度。探傷儀的基準靈敏度確定思路是:在基準靈敏度下,需要檢測的最小傷損產生的回波高于閾值時,可以被檢出;對于當量尺寸大于最小傷損尺寸的傷損,在高于基準靈敏度的檢測靈敏度條件下,產生的回波也應大于閾值,所以也會被檢出。
使用探傷車進行檢測時,傷損檢出的判讀標準與探傷儀相比發生了變化,不再依據單次超聲波探測的回波幅值與閾值關系進行判斷,而是通過多次超聲波探測產生的回波與閾值關系進行判斷。如在80 km/h檢測速度時,掃查間距為5.56 mm,按至少掃查3次計算,要求超聲波通道在5.56×3=16.68 mm移動范圍內,超聲波回波均需大于設定閾值。探傷車檢測傷損判讀標準要高于探傷儀傷損判讀標準。
當閾值設定為40%時,探傷儀A顯判傷原理見圖2(a),當超聲波回波的幅值超過40%,則可認為該處超聲波回波為報警回波。使超聲波回波幅值達到圖2(a)所示條件的靈敏度為探傷儀A顯基準靈敏度。探傷車B顯判傷原理見圖2(b),在Δt時間內的超聲波回波幅值均超過40%,該處超聲波回波可視作報警回波。Δt的大小與探傷車掃查間距相關,掃查間距越大,Δt越大。使超聲波回波幅值達到圖2(b)所示條件的靈敏度為探傷車B顯基準靈敏度。對比圖2(a)與圖2(b)的超聲波回波幅值可見,圖2(b)中超聲波回波最大幅值大于圖2(a)中超聲波回波最大幅值,即探傷車B顯基準靈敏度需高于探傷儀A顯基準靈敏度。探傷車檢測速度越高,掃查間距越大,所需的Δt越大,即探傷車B顯基準靈敏度越高。
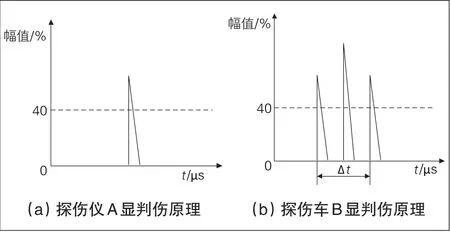
圖2 基于判傷原理的探傷車與探傷儀基準靈敏度對比
探傷車與探傷儀基準靈敏度相同之處在于:
(1)均采用超聲波回波幅值與閾值對比方式,回波幅值小于閾值時判讀為非傷損。
(2)均采用特定位置特定尺寸的人工傷損檢出時的檢測靈敏度作為基準靈敏度。
(3)檢測過程中檢測靈敏度均需高于基準靈敏度。
探傷車與探傷儀檢測基準靈敏度不同之處在于:
(1)特定位置特定尺寸的人工傷損判讀標準不同。探傷車檢測主要針對B顯圖形進行判讀,需至少3個回波圖形且具備一定圖形走勢。探傷儀在確認傷損時,一般采用A顯圖形對傷損進行定量與確認。
(2)探傷車在不同檢測速度下基準靈敏度不同。探傷車B顯圖形中回波個數受檢測速度影響,即設置相同的檢測靈敏度,在不同檢測速度時回波個數有明顯差異。因此不同檢測速度下,同一位置同一尺寸的人工傷損被檢出具有不同的檢測靈敏度,即不同檢測速度,基準靈敏度不同。探傷儀檢測速度一般為2~3 km/h,回波個數在不同檢測速度時基本相同,因此同一位置同一尺寸的人工傷損被檢出時的檢測靈敏度差別不大,可認為在檢測過程中基準靈敏度不變。
3 基于超聲波A顯掃查間距的基準靈敏度確定方法
探傷車在檢測時,可能會更換超聲波探輪,不同探輪內的超聲波換能器不同,因此基準靈敏度除與檢測速度相關外,還需針對探輪進行確定,需要排除探輪對中、鋼軌表面狀態等因素影響[9]。此外,基準靈敏度還和超聲波檢測系統性能密切相關,在確定基準靈敏度時需使用探傷車超聲波檢測系統。
基準靈敏度確定方法基于以下前提:
(1)假設對于探傷車用超聲波檢測系統的不同超聲波通道,超聲波發射接收的部分性能相近,不區分超聲波通道。
(2)當產生3個超聲波回波時,認為該傷損為檢出。
(3)探傷車各個檢測速度下的掃查間距參照表1。
(4)探輪均按裝備要求進行調零整備完畢。
以探輪中45°超聲波通道為例,該超聲波通道在檢測速度60 km/h時的基準靈敏度A60確定方法如下:
(1)從表1中可查到,當檢測速度為60 km/h時,掃查間距為4.17 mm。
(2)將超聲波探輪安裝在帶試塊位移刻度的HT-1型標定臺上,調整好探輪對中與下壓量,將探輪線纜接到探傷車檢測系統中對應的探輪接口,安裝被測探輪后的HT-1型標定臺見圖3。

圖3 安裝被測探輪后的HT-1型標定臺
(3)選擇探輪中45°超聲波通道,設置探傷車超聲波檢測系統的45°超聲波通道的閘門延遲、閘門寬度、閾值、抑制與檢測狀態一致,將45°通道A顯信號切換至顯示界面。
(4)設定超聲波通道初始增益值A0。
(5)調節位移旋鈕,使傷損試塊從左至右運動,找到3 mm螺孔下裂人工傷損的傷損回波,當傷損回波由低向高達到設定閾值時,從試塊標尺上讀出試塊位移L1。
(6)調節位移旋鈕,使傷損試塊從左至右繼續運動,當人工傷損的回波幅值由高向低達到設定閾值時,從試塊標尺上讀出試塊位移L2。
(7)若L2-L1<4.17+δ,δ為設定的冗余量,可選δ=0.5 mm。則增大45°通道增益值,重復步驟(4)與(6)。
(8)若L2-L1>4.17+δ,δ為設定的冗余量,可選δ=0.5 mm。則減小45°通道增益值,重復步驟(4)與(6)。
(9)若|L2-L1-4.17|<δ,則此時的45°通道增益值即為速度60 km/h下的基準靈敏度,記為A60。60 km/h檢測速度下的基準靈敏度確定完畢。
(10)重復(1)~(9),依次得出其他檢測速度下45°通道的基準靈敏度A10、A20、A30、…、A80。
更換探輪、傷損試塊、超聲波通道,可測量得出每個探輪、每個超聲波通道在各個檢測速度下的基準靈敏度。可將各超聲波通道的基準靈敏度存入檢測參數文件,在檢測過程中,按檢測速度進行選用,依據鋼軌表面狀態對檢測靈敏度進行提高補償,但檢測靈敏度不得低于該速度下的基準靈敏度。
對于不同的超聲波檢測系統,需依據檢測系統的說明書查詢各個檢測速度下的掃查間距。
4 基準靈敏度試驗驗證
為驗證提出的基準靈敏度確定方法是否有效,在試驗轉臺上進行了動態試驗,試驗轉臺見圖4。
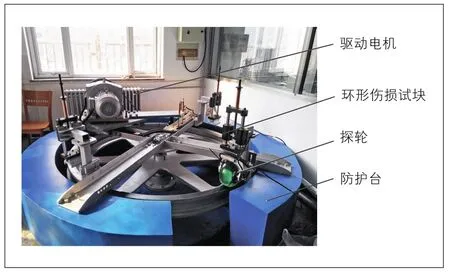
圖4 試驗轉臺
試驗轉臺安裝有環形傷損試塊,試塊上加工有人工傷損,在驅動電機的驅動下,環形傷損試塊的線速度最高可達80 km/h。試驗轉臺最多可安裝3個探輪,配裝有TKGT-I型探傷作業系統。
調整探輪下壓量,使零度超聲波通道界面波聲程為92μs,調整探輪對中,使探輪對中良好。采用HT-1試驗臺與TKGT-I型探傷作業系統對探輪各超聲波通道不同速度下的基準靈敏度進行確定。在試驗轉臺上對確定的基準靈敏度進行試驗,對環形傷損試塊的超聲波B顯圖形進行回波點數分析,結論如下:
(1)超聲波通道檢測靈敏度小于轉臺運行速度下的基準靈敏度時,B顯圖形回波點數均少于3個點,與理論分析相符。
(2)當設置的超聲波通道檢測靈敏度高于轉臺運行速度下的基準靈敏度,且耦合水噴灑正常時,B顯圖形回波點數可大于或等于3個點。與基準靈敏度相比,檢測靈敏度越高,超聲波回波點數越多,與理論分析相符。
(3)檢測靈敏度值繼續增大,超聲波B顯圖形中出現雜波。
因此,檢測靈敏度的最小值即為該方法確定的基準靈敏度,最大值為B顯圖形中出現零星雜波時的檢測靈敏度。
5 結論
為確定探傷車高速檢測時各個檢測速度下的基準靈敏度,分析探傷車超聲波檢測系統傷損判讀原理,對比探傷車與探傷儀基準靈敏度的異同點,提出探傷車不同檢測速度下基于超聲波A顯走波長度的基準靈敏度確定方法,并在試驗室進行試驗驗證,結論如下:
(1)探傷車超聲波檢測系統在不同檢測速度下具有不同的基準靈敏度,基準靈敏度與掃查間距密切相關,檢測速度越快,掃查間距越大,基準靈敏度越高;
(2)不同檢測速度下基準靈敏度的確定方法能夠確定相應檢測速度下的基準靈敏度,驗證得出該方法可行;
(3)探傷車檢測時,檢測靈敏度的最低值為檢測速度下的基準靈敏度,檢測靈敏度的最高值不得產生影響傷損判讀的雜波。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
