基于卡爾曼濾波的極限學習機在線盲均衡算法
2021-03-02 06:09:36趙傲男
系統工程與電子技術 2021年3期
關鍵詞:信號
楊 凌,程 麗,韓 琴,趙傲男
(蘭州大學信息科學與工程學院,甘肅 蘭州 730000)
0 引 言
盲均衡技術在文獻[1]中首次被提出,與傳統的自適應均衡技術不同,在信道特性未知的情況下,其可以利用信號的統計特性,無需發送訓練序列便可以恢復原始信號[2-5]。盲均衡最常用的是基于高階統計量的方法,該方法由于涉及信號高階統計量的計算,計算復雜度較高,需要大量樣本才能實現收斂且收斂速度較慢[6]。
考慮到發送信號之間互不相關的特點,Slock首先提出采用線性預測方法解決盲均衡問題[7],雖然線性濾波器結構簡單,但受到其階數限制的影響,最終結果精度較低。為了提升均衡性能,Ferrari等人和Cavalcante等人采用了非線性結構的預測濾波器(predictive filter,PF),分別提出了基于模糊濾波器和基于神經網絡的盲均衡方法[8-9]。文獻[10]基于發送序列為二進制信號并且無信道噪聲的假設,在預測方法框架下使用多層感知機(multilayer perceptron,MLP)完成了線性信道的在線盲均衡。文獻[11]基于預測方法,使用新型的極限學習機(extreme learning machine,ELM)完成了線性和非線性信道下的盲均衡,然而由于采用實數型極限學習機,該方法無法解決對信號發送端進行具有高頻譜效率特點的復數正交振幅調制(quadrature amplitude modulation,QAM)的情形。而且,文獻[11]中ELM輸出權值的計算采用經典的求廣義逆矩陣的方法,只能對接收序列進行離線批處理,然而在很多通信場景中,信道可能會隨著時間發生變化,該方法無法對發送信號進行實時均衡。
傳統的ELM訓練算法是對數據進行離線(批量)處理的[12],即在開始訓練之前已經得到所有的樣本,并且使用這批樣本不斷進行迭代更新參數,但這種方法在很多在線場景下無法應用。為了解決該問題,文獻[13]首次提出ELM的在線訓練方法,采用最小二乘(least squares,LS)的方法求解輸出權值。作為一種參數估計方法,當回歸向量存在多重共線性時,LS的估計方差較大,導致模型的穩定性受到很大影響[14]。為了控制這種影響,文獻[15-18]添加正則化項來更新ELM的輸出權值以獲得其最小范數,其中正則化參數的選取是決定算法性能好壞的關鍵,然而參數的調整十分困難,較多的優化參數會引起算法的時間復雜度增大。文獻[19]通過計算訓練數據的均值和方差調整輸出權值,這大大增加了計算復雜度。卡爾曼濾波(Kalman filter,KF)作為一種遞歸線性最小方差的估計方法,可以降低多重共線性帶來的影響[20]。采用KF方法實時更新ELM的輸出權值,既可避免復雜的正則化參數調整過程,同時又可保證較低的計算復雜度。
為了解決復數QAM信號的實時盲均衡問題,本文在預測方法框架下,構造了基于KF的ELM在線盲均衡算法。該算法用復數型ELM(complex ELM,C-ELM)代替線性PF,并且采用KF方法實時更新C-ELM的輸出權值,然后調整均衡后信號幅度變化并糾正相位旋轉問題。該算法有效地實現了在接收端對發送信號進行實時均衡。
1 問題描述
1.1 基于預測方法的盲均衡


假設發送端信號s(n)通過以下信道,則
(1)
式中,hi為信道沖激響應系數;Lh為信道沖激響應長度。
那么,受加性噪聲干擾的接收端信號x(n)可表示為
(2)
預測誤差e(n)表示為
e(n)=x(n)-P(x(n-1))
(3)
式中,x(n-1)=[x(n-1),x(n-2),…]T;P(·)表示PF。
假設線性PF滿足以下形式,
(4)
式中,Lp是濾波器階數。
則預測誤差e(n)為
e(n)=s(n)h0+s(n-1)h1+…+b(n)-
(x(n-1)p1+x(n-2)p2+…+x(n-Lp)pLp)
(5)
將式(2)中的x(n-1),x(n-2)等代入式(5),得到
e(n)=s(n)h0+b(n)+s(n-1)[h1-h0p1]-b(n-1)p1+
…-s(n-Lp-Lh+1)hLh-1pLp-b(n-Lp))pLp
(6)
為了實現良好均衡性能,目的是留下式(6)右邊的第一項s(n)h0,同時去掉剩下多余部分。顯然,式(6)中的剩下多余項無法用線性濾波器完全消除。為了提高精度,增加濾波器的長度是一種可行的方法,但也不能消除噪聲的影響,同時還增加了計算復雜度。非線性濾波器是良好的通用函數逼近器,在均衡器的設計中其被廣泛使用。
假設PF的非線性映射函數用φNN表示,可將式(6)重寫為
e(n)=x(n)-φNN(x(n-1))=s(n)h0+s(n-1)h1+
s(n-2)h2+…+b(n)-φNN(x(n-1),x(n-2),…)
(7)
為達到理想的均衡目的,φNN應滿足
φNN(x(n-1),x(n-2),…)=s(n-1)h1+s(n-2)h2+
…+s(n-Lh+1)hLh-1+b(n)
(8)
由于神經網絡可以逼近任意復雜的非線性系統,具有很強的魯棒性,因此使用神經網絡作為PF。然而,由于傳統的神經網絡(如MLP等)常采用梯度下降算法訓練,易陷入局部極小,因此很難獲得理想的均衡效果。
1.2 ELM
ELM作為一種單隱層前饋神經網絡[22],由輸入層、隱含層和輸出層組成,其網絡拓撲如圖2所示,層與層之間采取全連接的連接方式。隱含層的輸入權值和偏置均隨機產生,輸出權值的解具有最小訓練誤差和最小范數特征,這與傳統的基于梯度的訓練方法相比,具有更高的效率,能夠得到接近全局解的最優解[23]。

圖2 ELM的拓撲結構Fig.2 Topology structure of ELM
假設輸入層、隱含層、輸出層節點數目分別為d,l和m。現有N個樣本(xi,ti),i=1,2,…,N,其中xi∈Cd為輸入,ti∈Cm為期望輸出,則ELM輸出可表示為隱含層輸出的線性組合
(9)
式中,βi=[βi1,βi2,…,βim]∈Cm是隱含層第i個節點連接輸出層的權值向量;h(x)=[h1(x),h2(x),…,hl(x)]表示隱含層輸出,其中hi(x)=g(wi,bi,x);wi=[w1i,w2i,…,wdi]T∈Cd是輸入層連接隱含層第i個節點的權值向量;bi∈C是隱含層第i個節點的偏置;w和b均隨機生成;g(·)為隱含層激活函數。

Hβ=T
(10)
式中,
(11)
滿足式(10)的最小二乘解為
β=H?T
(12)
式中,H?是隱含層輸出矩陣H的Moore-Penrose廣義逆矩陣。
通常情況下,ELM的輸出層為線性輸出層,在面對顯著非線性問題時,可在ELM輸出層添加一個非線性輸出函數freadout(·)以增強非線性映射能力[11],網絡最終輸出為
y=freadout(Hβ)
(13)
2 算法描述
由于本文處理復數QAM信號,若采用實數型ELM對其實部和虛部分開處理會忽略兩者之間的相關性,導致結果精度較低。因此選用C-ELM[24]作為圖1中的PF,并且采用KF方法代替廣義逆矩陣求解方法在線更新C-ELM的輸出權值。
首先構建卡爾曼狀態空間模型如下:β(n)為n時刻系統狀態向量(對應C-ELM隱含層的輸出權值向量),F(n)為狀態轉移矩陣,q(n)和r(n)分別為動態噪聲和測量噪聲,并假設為統計獨立的均值為零的高斯過程,x(n)為測量值(對應n時刻C-ELM的期望輸出),H(n)為測量矩陣(對應n時刻C-ELM隱含層的輸出矩陣)。狀態方程和測量方程分別為
β(n)=F(n-1)β(n-1)+q(n)
(14)
x(n)=H(n)β(n)+r(n)
(15)
采用KF方法在線計算C-ELM輸出權值的過程包括兩個基本工作步驟:第一步為時間更新,第二步為測量更新。
假設動態噪聲和測量噪聲的協方差矩陣分別用Q(n)和R(n)表示,其中Q(n)=E[q(n)qT(n)],R(n)=E[r(n)rT(n)]。輸出權值的誤差協方差矩陣記為P(n),即P(n)=E[(β(n)-β-(n))(β(n)-β-(n))T]。
時間更新:利用前一時刻C-ELM的輸出權值β(n-1)和其誤差協方差矩陣P(n-1)分別計算當前時刻C-ELM的輸出權值和其誤差協方差陣的先驗預測值β-(n)和P-(n)。
β-(n)=F(n-1)β(n-1)
(16)
P-(n)=F(n-1)P(n-1)FT(n-1)+Q(n-1)
(17)
測量更新:通過C-ELM的期望輸出x(n)對β-(n)和P-(n)進行修正,得到C-ELM的輸出權值和其誤差協方差陣的后驗估計值β(n)和P(n)。
β(n)=β-(n)+K(n)[x(n)-H(n)β-(n)]
(18)
P(n)=[I-K(n)HT(n)]P-(n)
(19)
式中,K(n)為KF增益,計算方式為
K(n)=P-(n)H(n)[R(n)+HT(n)P-(n)H(n)]-1
(20)
當β(0)和P(0)確定后,通過迭代計算的方式實時更新β(n),從而得到C-ELM的輸出
y(n)=β(n)H(n)
(21)
那么,預測誤差可以表示為
e(n)=x(n)-y(n)
(22)
由式(17)可知,Q(n)的增加會使得P-(n)增大,導致算法預測的不確定性增加。由式(20)可知,隨著R(n)的減小,KF增益K(n)增大,來自估計值的噪聲水平增大,最終也使P-(n)增大,算法的預測精度下降。因此,算法需要合理設置Q(n)和R(n)的值,通常通過交叉驗證確定。
結合式(7)和式(8)可知,理想的預測誤差e(n)應為s(n)h0,由于信道系數h0的影響,會存在信號幅度的失真,可通過自動增益控制裝置按照式(23)和式(24)調整信號幅度變化。
a(n)=a(n-1)+α·abs[C-abs(e(n)·a(n-1))]
(23)
e(n)=a(n)·e(n)
(24)
式中,abs表示絕對值;a(n)為幅度因子;α為小于1的幅度加權因子;常數C為自定義的電平數。
對于QAM信號,考慮到信道畸變使信號的相位發生變化,經過AGC裝置后還需要糾正信號的相位旋轉。假設φ(n)為相位調整因子,γ為小于1的加權因子,angle[·]表示相位,按照式(25)和式(26)糾正相位。
φ(n)=φ(n-1)-γ·angle[e(n)·ejφ(n-1)]
(25)
e(n)=e(n)·ejφ(n)
(26)
由上述推導得到基于KF訓練的ELM在線盲均衡算法,簡稱為C-ELM-KF-PF,算法實施步驟如下所示。
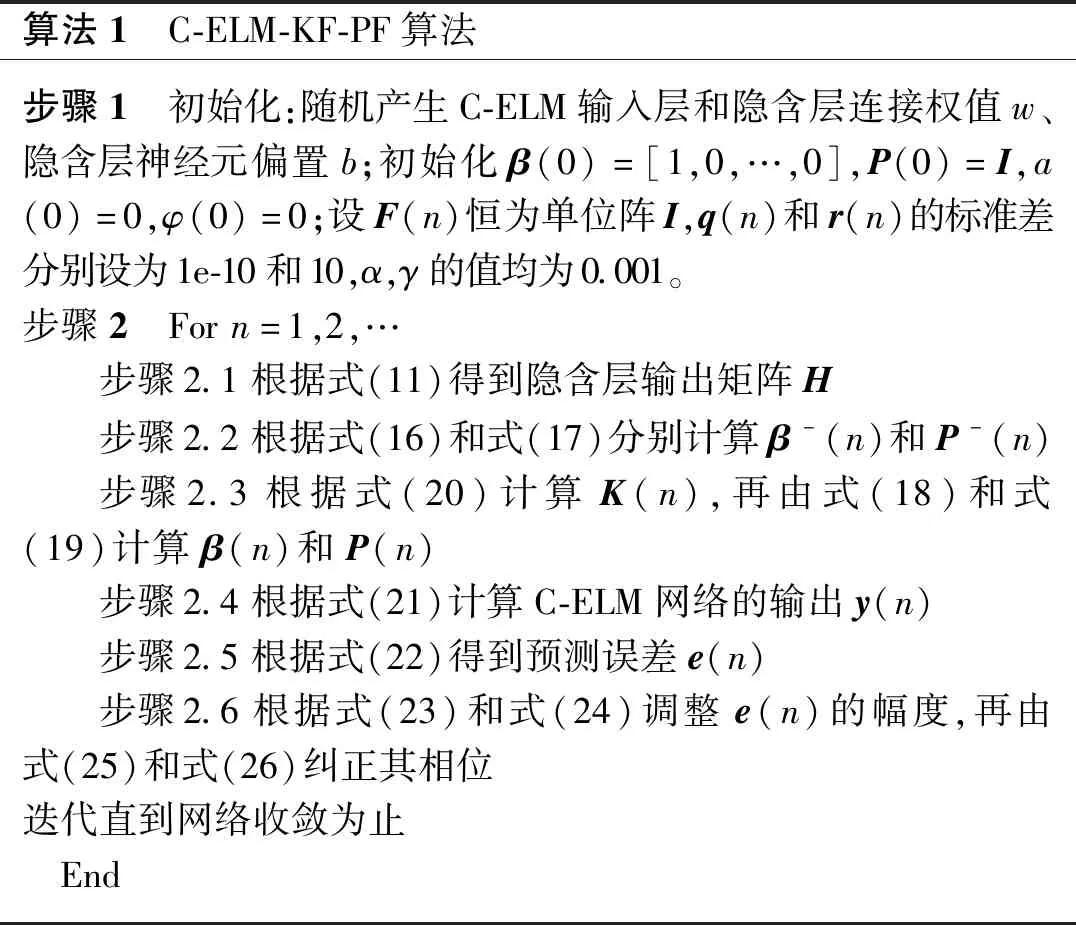
算法1 C-ELM-KF-PF算法步驟1 初始化:隨機產生C-ELM輸入層和隱含層連接權值w、隱含層神經元偏置b;初始化β(0)=[1,0,…,0],P(0)=I,a(0)=0,φ(0)=0;設F(n)恒為單位陣I,q(n)和r(n)的標準差分別設為1e-10和10,α,γ的值均為0.001。步驟2 Forn=1,2,…步驟2.1根據式(11)得到隱含層輸出矩陣H步驟2.2根據式(16)和式(17)分別計算β-(n)和P-(n)步驟2.3根據式(20)計算K(n),再由式(18)和式(19)計算β(n)和P(n)步驟2.4根據式(21)計算C-ELM網絡的輸出y(n)步驟2.5根據式(22)得到預測誤差e(n)步驟2.6根據式(23)和式(24)調整e(n)的幅度,再由式(25)和式(26)糾正其相位迭代直到網絡收斂為止 End
3 實驗仿真
本節針對QAM信號,設計了4組仿真實驗,驗證本文提出的C-ELM-KF-PF算法的性能。第1組實驗研究C-ELM網絡的參數設置對本文算法收斂性能的影響。為了進一步說明本文算法的優越性,第2組實驗仿真了基于線性預測器和基于MLP預測器的在線盲均衡算法,用本文算法與其作比較。第3組實驗仿真本文算法對動態時變信道的實時均衡性能。第4組實驗仿真本文算法對方形和十字形QAM信號的均衡性能。
計算機仿真中,復數QAM信號被作為發送端信號s(n),添加高斯白噪聲。采用均方誤差(mean squared error,MSE)進行性能比較,MSE被定義為
(27)
式中,L為發送端信號序列長度。
3.1 C-ELM參數對C-ELM-KF-PF算法性能影響
為了分析C-ELM參數對本文算法收斂性能的影響,仿真過程圍繞隱層節點個數l,隱含層復數激活函數g(·)類型和輸出層輸出函數freadout(·)類型三方面進行。發送信號為16QAM信號,信道模型采用文獻[25]中的五階Volterra級數衛星信道。
s(n-k)s*(n-m)s(n-t)
(28)
式中,hl,hi,j,k和hi,j,k,m,t分別為Volterra信道的一階、三階和五階核系數;N為記憶深度。
表1和表2給出了當復數激活函數為arctan函數,輸出層取線性輸出函數時,隱層節點個數l對算法收斂性能的影響。表1是不同接收機信噪比(signal to noise ratio,SNR)下,隱含層節點個數l對算法收斂時MSE的影響。可以看出,當l超過5后,進一步提高隱含層節點數目無法提升算法的收斂精度。表2是SNR取35 dB的情況下,l對算法收斂速率的影響,可見隨著l的增大,算法收斂速率保持不變,說明l的變化對算法收斂速率無影響。
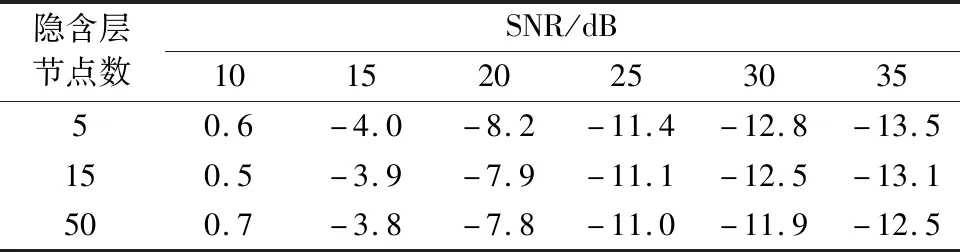
表1 不同SNR下隱含層節點數對算法穩態MSE的影響Table 1 Effect of hidden nodes number on steady MSE under different SNRs

表2 隱含層節點個數對算法收斂速率的影響 Table 2 Effect of hidden nodes number on convergence speed
表3和表4給出了在l=5,取線性輸出函數的條件下,SNR大小和激活函數類型對算法收斂時MSE和收斂速率的影響。從表3可發現,當SNR取任意值時,不同的復數激活函數對穩態MSE值影響不大,這說明本文算法的收斂精度對激活函數類型不敏感。然后,從表4可觀察到,在SNR=35 dB條件下,當g(·)為sin函數時,算法收斂速率較慢,而當g(·)為arctan和tanh函數時,算法收斂速率較快。
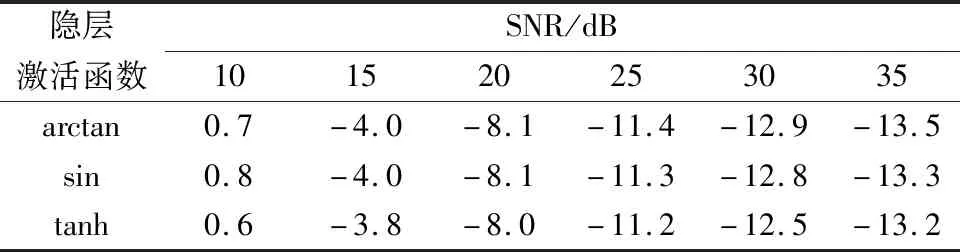
表3 不同SNR下隱含層激活函數g(·)對算法穩態MSE值的影響Table 3 Effect of hidden layer activation function g(·) on steady MSE under different SNRs

表4 隱含層激活函數g(·)對算法收斂速率的影響Table 4 Effect of hidden layer activation function g(·) on convergence speed
在SNR=35 dB,隱層節點數l=5,g(·)取arctan函數的條件下,輸出層輸出函數freadout(·)類型對本文算法收斂時MSE和收斂速率的影響分別如表5和表6所示。

表5 輸出層輸出函數freadout(·)對算法穩態MSE值的影響Table 5 Effect of readout function freadout(·) on steady MSE

表6 輸出層輸出函數freadout(·)對算法收斂速率的影響Table 6 Effect of readout function freadout(·) on convergence speed
仿真中輸出函數有兩種類型:第一,freadout(y)=y,滿足線性關系。第二,freadout(y)=f(y)+jf(y),其中f(y)=y+κsin(πy),κ=0.4,滿足非線性關系。從表5可以看出,SNR>15 dB時,非線性輸出函數會使算法收斂精度更高。由表6可以看出,算法在兩種輸出函數下收斂時所需迭代次數幾乎一致。因此,輸出函數類型會影響算法的收斂精度,但不會影響算法的收斂速率。
3.2 與其他在線盲均衡算法的性能對比
為了驗證本文算法的優越性,本組實驗在16QAM信號通過式(28)所示的信道下,同時仿真了基于線性預測器的在線盲均衡算法(記為Linear-PF),基于MLP預測器的在線盲均衡算法(記為MLP-PF),以及本文的C-ELM-KF-PF算法。其中,C-ELM的隱層節點數lC-ELM設置為5,隱含層復數激活函數g(·)為arctan函數,輸出層采用第3.1節提到的非線性輸出函數;MLP的隱層節點數lMLP=15,輸出層設置與C-ELM相同;線性預測器的階數LP=15。
圖3(a)給出了不同SNR下各算法的穩態MSE,圖3(b)給出了接收機SNR=35 dB時,各算法的收斂性能。由圖3(a)可以發現,當接收機SNR超過15 dB后,本文提出的C-ELM-KF-PF算法顯著提高了收斂精度。比如,在接收機SNR=35 dB的情況下,本文算法的穩態MSE只有MLP-PF和Linear-PF算法的1/10和1/1 000。由圖3(b)可觀察到,C-ELM-KF-PF算法不僅穩態誤差更小,而且收斂速率是其余兩種算法的兩倍多。因此,在3種算法中,本文提出的C-ELM-KF-PF算法的收斂速率最快,且其穩態誤差最小,體現了較強的魯棒性。
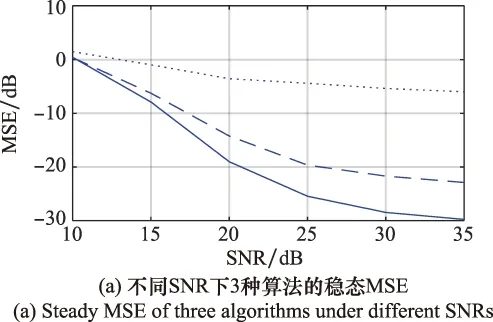

圖3 3種算法的均衡性能比較Fig.3 Equalization performance comparisons of three algorithms
表7給出了各算法更新一次的運算量。由于C-ELM-KF-PF算法中的式(16)~式(20)包含大量的復數乘法運算,所以計算復雜度較高。但是,由于實際均衡過程中僅使用較少的隱層節點(lELM=5)。因此,其總的運算量與MLP-PF算法(lMLP=15)相當。雖然Linear-PF算法(LP=15)的復數乘法運算量最少,大約為本文算法的1/3,但其均衡性能遠低于本文算法。

表7 C-ELM-KF-PF算法、MLP-PF算法與Linear-PF算法的運算量比較Table 7 Calculations comparison of C-ELM-KF-PF,MLP-PF and Linear-PF algorithm
3.3 實時均衡性能
為仿真當信道發生變化時C-ELM-KF-PF算法的實時均衡性能,本節設置如下實驗。
設發送信號為16QAM信號,通過式(28)所示的Volterra信道,接收機SNR=35 dB,C-ELM隱含層節點數為5,隱含層激活函數g(·)為arctan函數,輸出層分別使用第3.1節的線性和非線性輸出函數。當算法進行到10 000次迭代時改變信道的核系數,從而完成信道的切換。圖4所示出了C-ELM-KF-PF算法實時均衡的收斂性能。
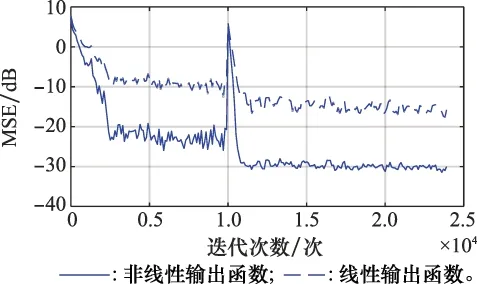
圖4 C-ELM-KF-PF算法的實時均衡性能分析Fig.4 Real-time equalization performance of C-ELM-KF-PF
由圖4可以看到,無論采用線性還是非線性輸出函數,算法的收斂速率是一致的。當完成信道切換之后,算法第二次均衡達到收斂時所需時間不到第一次的一半,便能達到較低的穩態誤差。這表明C-ELM-KF-PF算法對于動態時變信道能較快跟蹤其變化,具有良好的實時均衡能力。
3.4 方形和十字形QAM信號的均衡
圖5和圖6是接收機SNR=35 dB,C-ELM的隱含層節點數為5,隱含層激活函數g(·)為arctan函數,輸出層采用第3.1節的線性和非線性輸出函數時,方形的16QAM和十字形的32QAM信號通過式(28)所示的衛星信道時本文算法的均衡過程。比較圖5(c)、圖5(d)和圖6(c)、圖6(d)可以看出,采用非線性輸出函數使得QAM信號的星座圖更加集中。由圖5和圖6可以看出,無論對于方形QAM信號,還是十字形QAM信號,本文提出的基于KF的ELM在線盲均衡算法均具有較好的均衡效果。
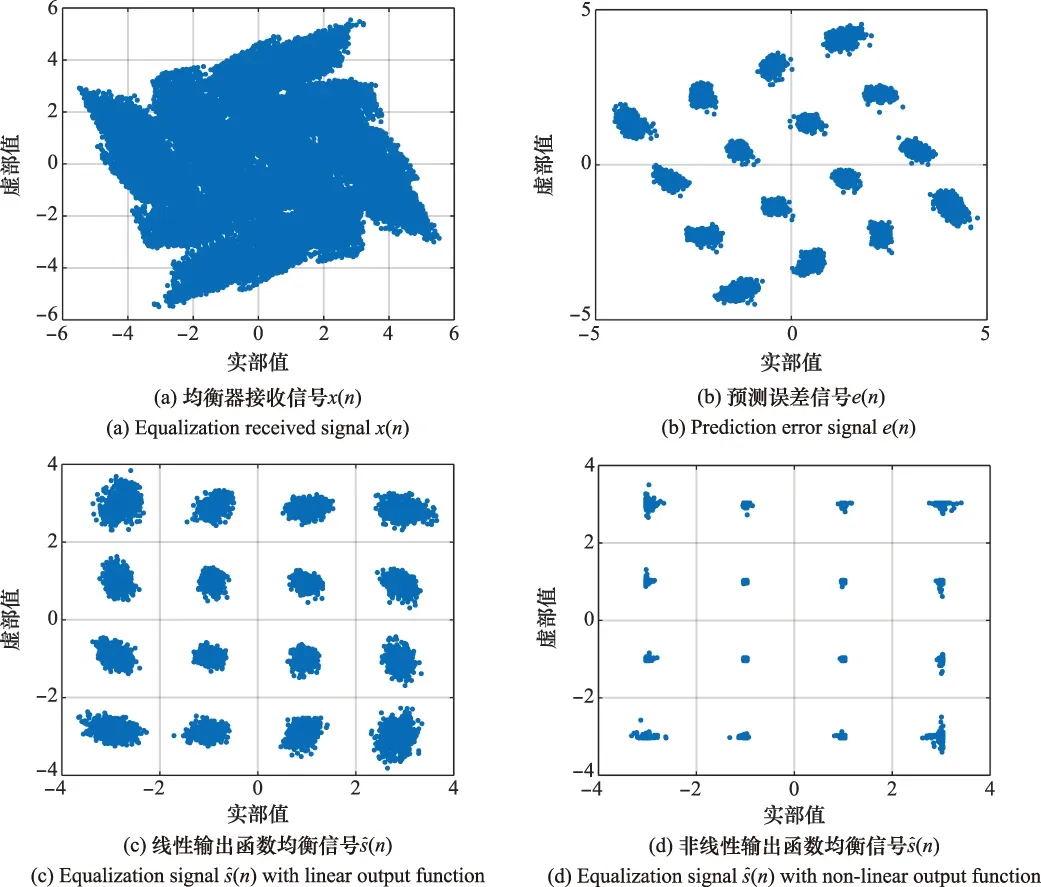
圖5 16QAM信號的均衡過程Fig.5 Equalization process for 16QAM signal
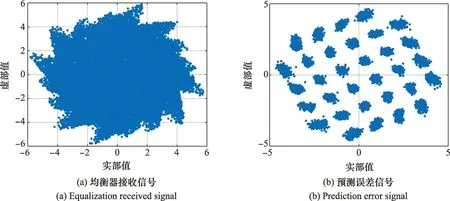
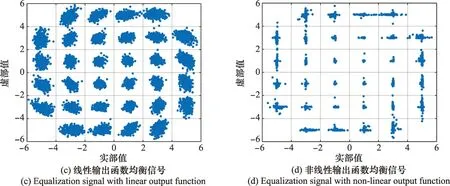
圖6 32QAM信號的均衡過程Fig.6 Equalization process for 32QAM signal
4 結 論
本文針對復數QAM信號,在預測方法的盲均衡框架下,提出了一種新的在線盲均衡算法。該算法用C-ELM替代傳統的線性PF,并采用KF方法實時更新C-ELM的輸出權值,最后通過AGC裝置調整信號幅度變化并引入相位調整因子糾正相位旋轉。實驗結果表明,本文算法在C-ELM隱含層節點數僅為5時就能獲得較好的均衡效果,與其他在線盲均衡算法相比,在計算代價相當的情況下,本文算法具有較強的魯棒性,收斂時的MSE最小,收斂速率最快。當信道發生變化時,本文算法能快速地實時進行均衡。此外,無論是對方形還是十字形的QAM信號,本文算法均呈現出良好的均衡效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06