機械式振動臺結構設計及其波形復現性能測試研究
2021-03-04 04:09:58郭迎慶李宗蔭楊曉璐
上海航天 2021年1期
郭迎慶,李宗蔭,2,楊曉璐
(1.南京林業大學機械電子工程學院,江蘇南京 210037;2.中國電子科技集團公司第十六研究所,安徽合肥 230601)
0 引言
隨著航空航天、電子工業的快速發展,各種用于測試航天器部件等儀器設備的振動試驗裝置也日益發展起來。由于航天及電子產品在設計階段以及驗收階段均需要進行一系列的環境振動測試,這就要求相應的測試設備具有較高的檢測性能[1-4]。振動臺作為一種集結構激振、性能測試和數據分析等功能為一體的科學振動試驗裝置,已經被廣泛地應用在航空航天、車輛交通、建筑結構和工業自動化等眾多工程領域[5-6]。伴隨著振動臺相關理論研究的深入和技術的發展,各種試驗結構模型也逐漸趨于精簡化、智能化[7],從而導致中小型振動臺在研究中的地位逐漸提高。但是,當前市面上現有的地震模擬振動臺多為液壓驅動的大功率振動臺,其存在污染嚴重、建造代價高昂等弊端,而現有的電機驅動的中小型振動臺卻存在普遍進口、價格昂貴、開放性低等缺點。因此,如何設計一款擁有自主知識產權的結構精巧、性價比高的中小型振動臺試驗裝置,對于降低振動測試成本、提高測試性能具有重要的工程實際意義。
國內外相關領域的研究人員已經進行了多年的振動臺試驗研究,并已經將相關研究成果應用到實際工程當中。王猛等[8]提出一種偏心輪式機械振動臺,并通過有限元分析驗證了所設計振動臺的可行性。田軍委等[9]在活塞式發動機工作原理的基礎上提出一種對稱式曲柄滑塊振動臺方案,利用其對稱式的特點有效抵消高頻振動時的慣性沖擊。謝維泰等[10]采用機械運動機構中常見的曲柄連桿機構設計了一種機械式超低頻振動臺,并且通過典型應用實例驗證了機械式超低頻振動臺的實用性。在各類振動臺中,大推力液壓式振動臺的技術相對較為成熟,而小型機械式振動臺研究較少,其中電動振動臺因其承載范圍廣、工作頻段寬、波形好、易控制等諸多優點而備受青睞,成為一種應用廣泛的振動臺裝置[11-13]。由于機械式振動臺在某些振動試驗下有著獨特的優勢,所以針對機械式振動臺的相關技術研究具有重要的工程實用價值。
綜上,本文基于實際振動測試工程需要,結合計算機技術、嵌入式控制技術和電機控制技術,自主研制一套能精確再現加速度激勵測試信號的振動臺系統。利用系列性能測試試驗對設計的振動臺進行性能考核,經過測試表明振動臺波形復現精度較高,具有很好的波形跟隨性,滿足實際工程需要,可為后期中小型高精度振動臺的研究和設計提供一定的參考意義。
1 振動臺系統架構
雙向單自由度小型振動臺試驗裝置整體系統架構組成框圖如圖1 所示,主要包括控制模塊、激勵模塊、試驗模塊和數據采集模塊。其中,控制模塊由PC 機與嵌入式控制器組成,實現對激勵模塊的電機控制信號輸出;激勵模塊由伺服電機及其驅動器組成,實現對試驗模塊的激勵輸出;試驗模塊由絲桿、臺面等機械結構組成,實現試驗結構的固定及對激勵模塊輸出的響應;數據采集模塊由位移傳感器、加速度傳感器及編碼器組成,實現局部閉環控制及振動臺信號采集。此系統架構在滿足性能指標的同時,大大縮減了研制時間和試驗成本。
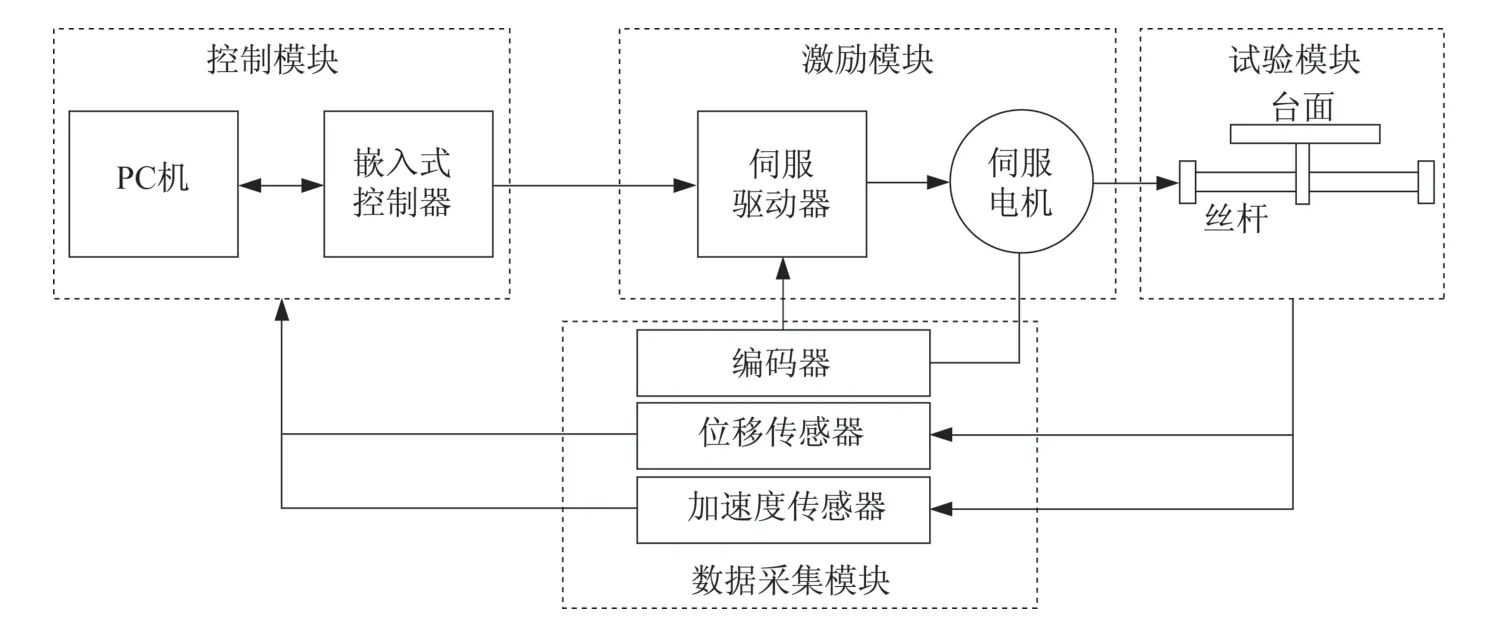
圖1 振動臺試驗裝置整體系統架構框圖Fig.1 Block diagram of the overall system architecture of the shaking table test device
2 關鍵模塊設計
為了實現振動臺對不同原始波形的精確再現,完成對待測設備的振動測試試驗,需要設計的振動臺試驗裝置中各個模塊彼此之間協調工作,因此,振動臺系統中關鍵模塊的設計是否合理顯得尤為重要。
2.1 原始數據處理
當前振動臺試驗測試激勵信號大多數以加速度信號形式存儲[14-16],并且選用電動伺服系統作為振動臺的激振源,為了提高控制精度需要在電機運轉的過程中對其速度和位移有嚴格的控制,綜合考慮采用伺服控制模式中的位置控制來完成系統力的轉換。
因此,需要求解出試驗輸入波形的位移和速度時程曲線,并通過這兩條曲線計算出伺服電機每次動作所需的控制信號,故加速度信號的積分處理成了振動臺試驗中不可或缺的一環。
選擇LabVIEW 作為數據處理平臺[17-18],采用模塊化方式按層次將程序分解成多個子VI,由頂層VI 模塊在高層管理并調度各子模塊工作,從而實現數據的讀取、處理、顯示和保存等功能。同時,子VI的代碼和數據會保留在內存中,有效降低了程序運行時的內存占用量。主模塊具體設計的程序面板如圖2 所示。其中,V1 為數據讀取模塊,選擇數據通信中“隊列操作”,結合條件結構中while 循環保證數據讀取的持續性;V2 為數據處理模塊,采用“元素出列”處理和雙精度轉換完成數據格式的處理,然后在頻域范圍內進行數據的解析,并且在解析過程中進行數組必要元素取舍,保證數據轉換的精度;V3 為數據顯示模塊,顯示經處理后的輸出脈沖數、速度和方向數據。
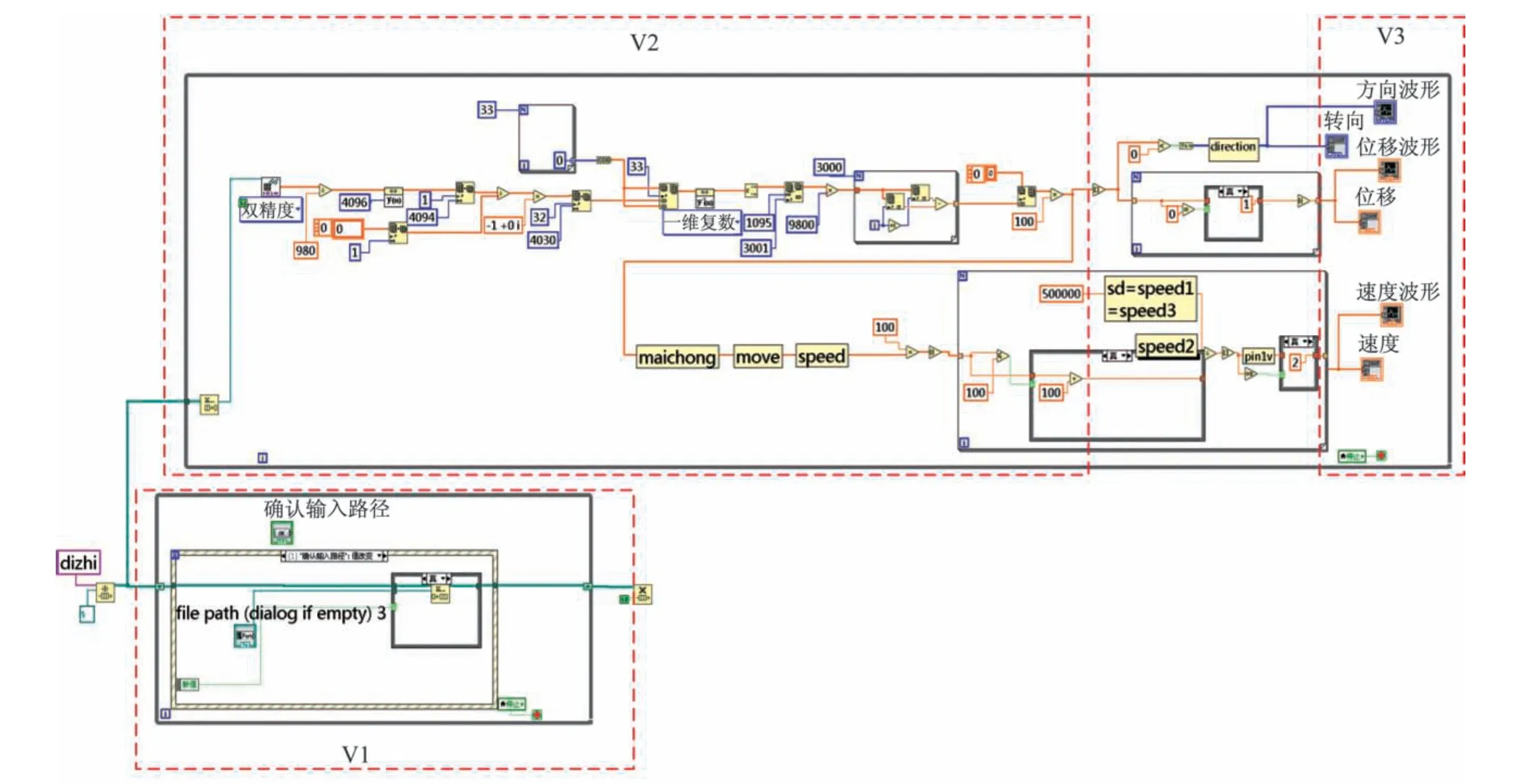
圖2 主模塊控制程序面板Fig.2 Main module control program panel
以220 gal 的Artificial 加速度地震波為輸入信號,處理后保存的速度與位移信號如圖3 所示。
2.2 機械結構和控制器的設計
合理完整振動臺機械結構和軟硬件的設計是振動臺控制系統正常運行的保障。根據振動臺性能指標完成對振動臺整體機械結構的設計,同時根據振動臺系統的控制要求并且遵循實用化、模塊化的方式,以嵌入式控制芯片為核心完成振動臺控制器的設計。控制器和機械結構兩者之間相互聯系、協調工作,保障振動臺系統的正常運行,其具體構造簡圖如圖4 所示。
2.2.1 機械結構
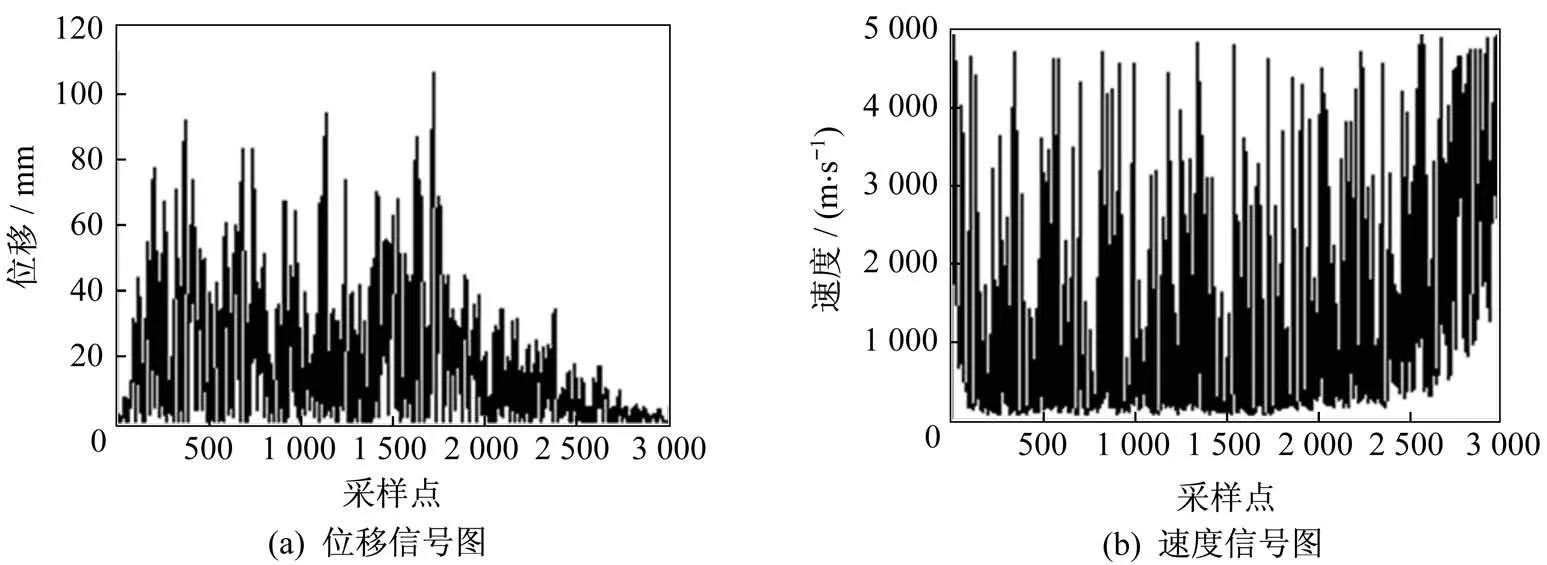
圖3 基于LabVIEW 處理后的數據信號圖Fig.3 Data signal diagram processed based on LabVIEW
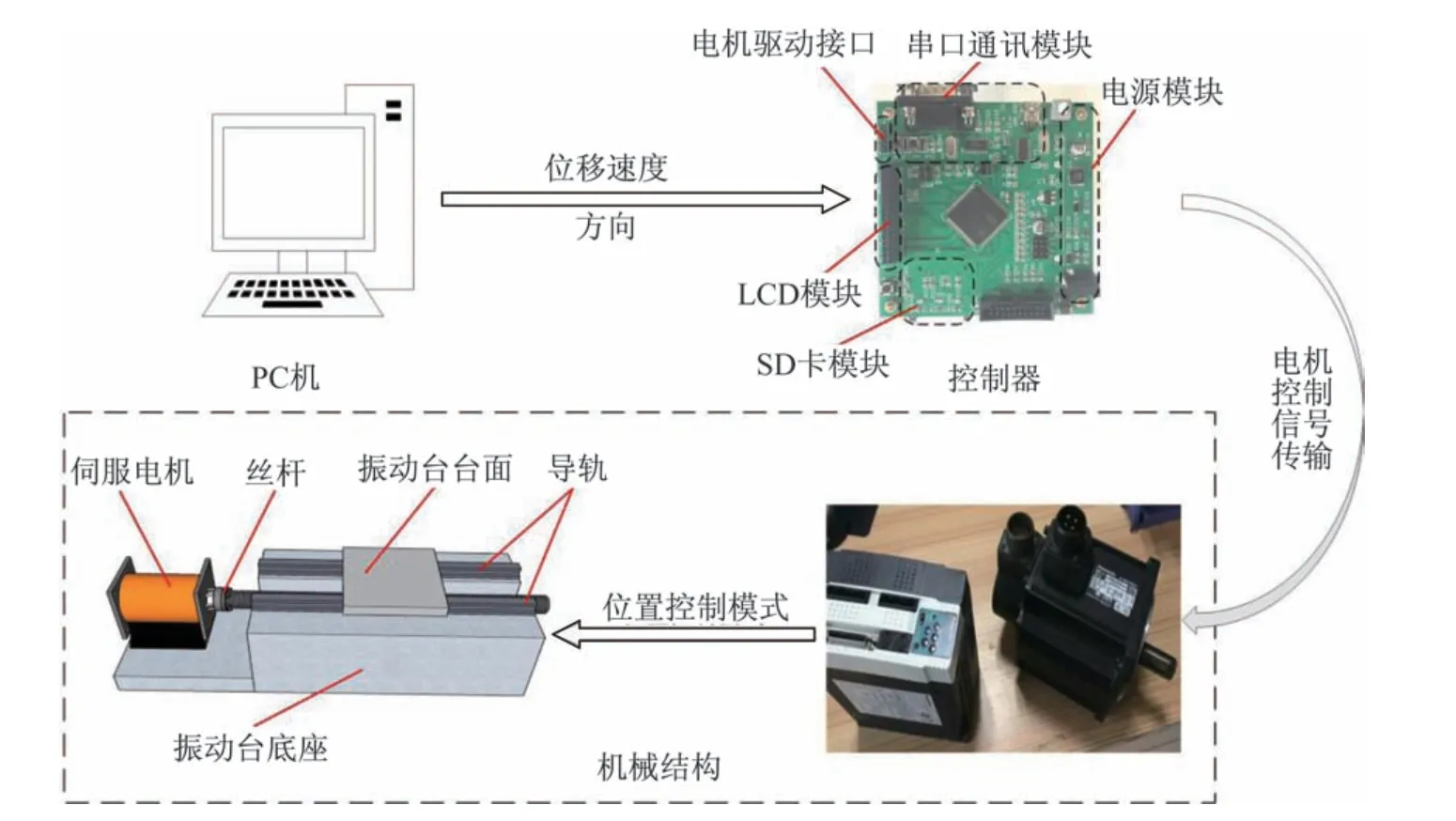
圖4 振動臺結構簡圖Fig.4 Vibration table structure diagram
根據實際設計要求,確定振動臺尺寸,其主要組成部分尺寸見表1。以伺服電機及其驅動器為激勵源,將絲桿與伺服電機的電機軸固接,使伺服電機的轉動轉換成平動,同時將絲桿螺紋與振動臺面螺紋對接,實現對振動臺面及其上的試驗結構的激勵,完成動力的流暢傳遞和試驗結構的加載。此外,伺服電機的驅動器選用位置控制模式并結合下位機控制器實現伺服電機準確運轉,并且根據振動臺實際試驗要求,在振動臺臺面及其上的試驗結構進行包括位移、力、加速度在內的多種數據采集,以便后期對試驗結構進行性能分析。
2.2.2 控制器
選用以STM32 為基礎的嵌入式最小系統,搭載振動臺控制系統所需功能要求所設計的一系列外圍電路。將電機控制狀態通過串口及時反饋給上位PC 機,構建上位PC 機與被控對象之間的數據通信,完成對上位PC 機數據的接收和SD 卡中文件數據的讀取,并將所讀取的數據轉換成對伺服電機的精確PWM(Pulse Width Modulation)控制信號輸出,從而完成對振動臺控制系統的控制任務。

表1 振動臺裝置尺寸Tab.1 Dimensions of shaking table apparatus mm
基于位置控制模式下,控制器與機械結構之間的數據轉換原理如圖5 所示。控制器向驅動器發送脈沖位置指令,脈沖位置經驅動器控制電機轉動,電機帶動編碼器轉動,編碼器將采集到的角位移信號處理后得到的反饋脈沖數送至驅動器,從而形成局部位置閉環控制,同時電機轉動帶動絲桿以一定速度旋轉,經齒輪后作用于振動臺臺面,此時絲桿的實際位移量M的表達式為

式中:P為控制絲桿移動位置的脈沖數量;D為指令分倍頻比;E為編碼器反饋脈沖數;R為減速比;L為絲桿螺距。
此時,與該脈沖頻率所對應的電機轉動速度V1和絲桿實際轉動速度V2分別表示為

式中:F為控制電機移動速度的脈沖頻率。
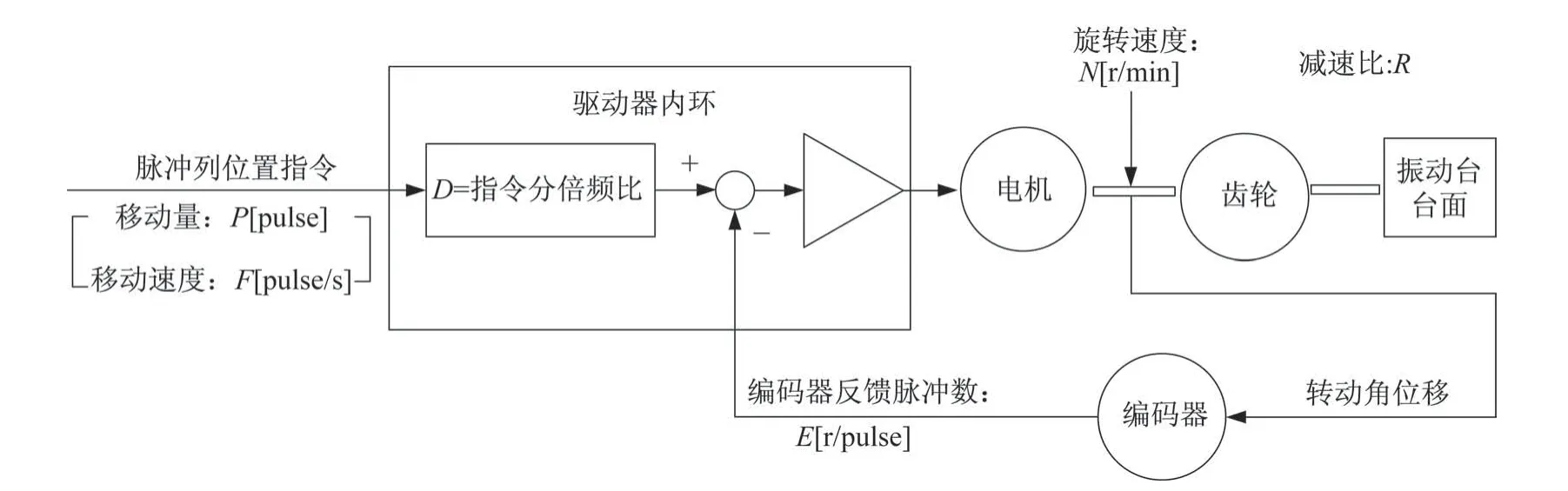
圖5 位置控制模式下信號轉換原理圖Fig.5 Schematic diagram of signal conversion in position control mode
3 振動臺性能分析試驗
基于振動臺的試驗要求,完成各個模塊的設計,搭建完整的振動臺試驗系統,其具體試驗裝置如圖6所示。為了驗證振動臺的波形復現能力,以真實的地震波加速度信號為試驗測試加載信號,針對振動臺控制系統各個關鍵環節進行性能分析試驗。

圖6 振動臺試驗系統實物圖Fig.6 Physical image of shaking table test system
3.1 系統硬件性能試驗
振動臺控制系統是整個振動臺系統的核心,系統硬件的性能是整個系統是否穩定可靠的關鍵因素之一。為了驗證振動臺系統硬件的穩定性和準確性,設計如下試驗:截取一段振動臺控制模塊處理后的電機控制信號作為下位機控制器的輸入,其具體數據片段見表2。下位機控制器根據輸入完成對SD 卡的文件檢索及數據讀取功能,整個數據讀取過程耗時在1 s 以內,滿足振動臺控制的要求。同時,控制器對輸入數據進行處理分析運算出與電機控制相關的位置、方向和速度信號,并通過LCD 顯示具體數值,將讀取結果(如圖7 所示)的顯示數據與測試數據進行對比發現完全一致,驗證了串口通訊的穩定性和SD 卡讀取的準確性。
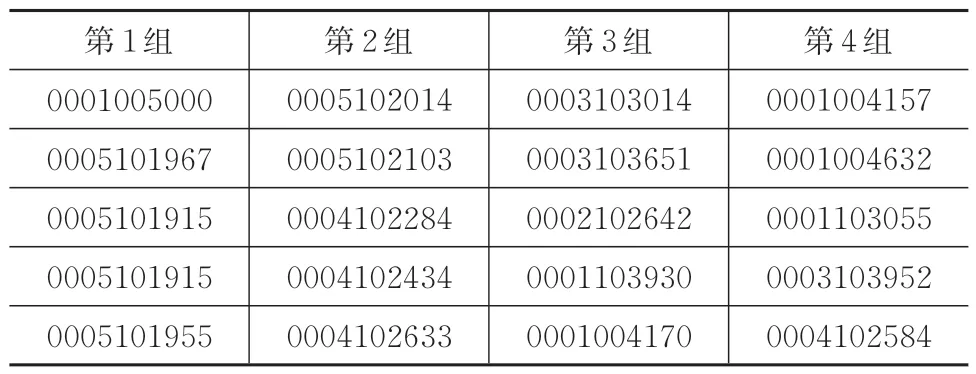
表2 系統硬件性能測試數據Tab.2 Performance test data of system hardware
3.2 伺服電機控制試驗
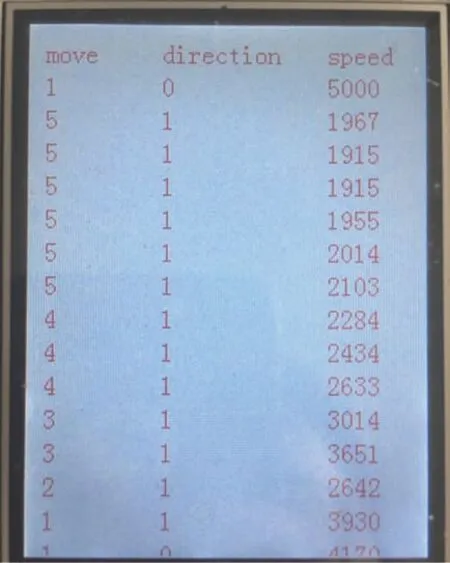
圖7 測試數據LCD 顯示結果Fig.7 Test data LCD display results
伺服電機的控制效果直接影響到整個振動臺控制系統的控制精度,對伺服電機的精確控制,是系統正常運行的保障,也是最為重要的一環。綜合考慮主控芯片控制能力,擬采用位置控制模式作為控制器對于伺服電機的主要控制思路。為驗證位置控制精確性,設計如下試驗:通過上位機向下位機控制器發送連續位移階躍的電機控制信號,以5 mm 作為階躍幅值,利用位移傳感器實現對振動臺面位置信號的采集。試驗結果如圖8 所示,最大誤差為2%,考慮到位移傳感器采集的一定誤差,采用伺服電機位置控制時,控制精確很高,其控制精度可達0.1 mm,足以勝任振動臺位置控制精度要求。
3.3 空載振動臺面波形復現試驗
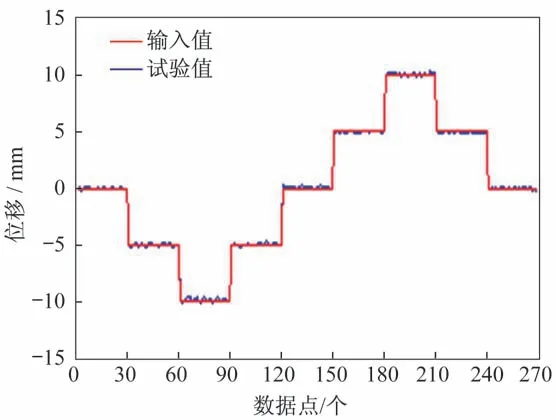
圖8 位置控制階躍輸入試驗結果Fig.8 Step input test results of position control
完成了振動臺試驗系統各個關鍵環節的有效性和可靠性驗證,從試驗的角度證實了本文所設計的振動臺控制系統的可行性。在此基礎上,以400 gal的真實Taft 地震波加速度信號作為振動臺輸入激勵,采用高精度加速度傳感器完成對振動臺面實時加速度數據的采集,試驗結果如圖9 所示,試驗曲線與理論的輸入曲線基本吻合。輸入值峰值加速度為400 gal,出現在3.7 s 處,試驗值峰值加速度為388 gal,出現在3.68 s 處,峰值加速度同樣很好再現。輸入值與試驗值最大誤差出現在7.54 s 處,為68 gal,最大誤差為27.3%。在試驗過程中,加速度試驗值呈現良好的跟隨性,加速度再現結果基本滿足要求。同時考慮試驗過程中的試驗誤差以及硬件性能等因素,誤差在允許的范圍內。本試驗驗證了所設計的振動臺系統在波形復現時的可行性與可靠性。
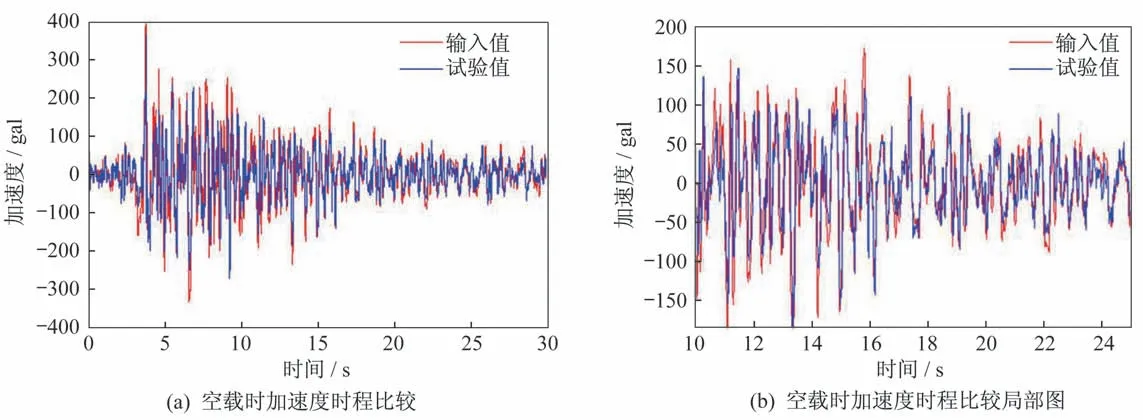
圖9 Taft 波作用下空載時振動臺的輸入值和試驗值的結果對比圖Fig.9 Comparison of results between the input value and test value of the shaker table under no load Taft wave
3.4 負載振動臺面波形復現試驗
基于振動臺在空載時良好的波形復現性能,為了檢驗振動臺在實際負載試驗情況下波形的復現精度,采用質量為93.77 kg 的Q235 型三層鋼板結構作為試驗負載,其負載實物如圖10 所示。此次負載試驗仍然沿用400 gal 的Taft 波作為振動臺的激勵,以便進行橫向對比分析,其試驗結果如圖11所示。根據振動臺面所測得加速度與試驗輸入值400 gal 的Taft 波之間的對比圖可知,試驗值最大峰值出現在3.68 s 處,為380 gal,而輸入值出現在3.70 s 處,其值為400 gal。同時,兩曲線最大誤差出現于4.20 s 處,其值為69 gal,最大誤差27.3%,試驗值呈現很好的跟隨性及還原性,負載時振動臺的波形復現精度基本符合工程要求。為了進一步對比振動臺在空載和負載狀態下波形復現狀態,當采用相同的400 gal的Taft 波作為激勵加載時,臺面加速度試驗值之間的對比如圖12 所示。
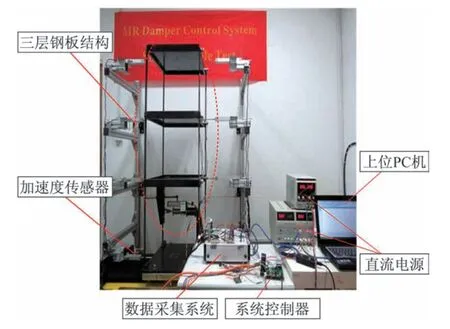
圖10 振動臺負載波形復現試驗Fig.10 Reproduction test of shaking table load waveform
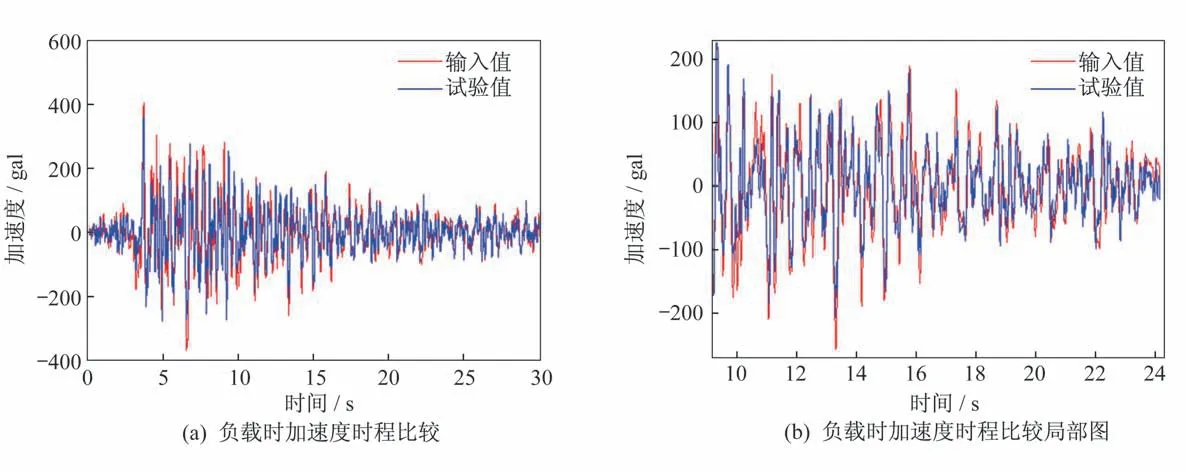
圖11 Taft 波作用下負載時振動臺的輸入值和試驗值結果對比圖Fig.11 Comparison of results between the input value and test value of the shaker under load Taft wave

圖12 Taft 波作用下負載與空載試驗值結果對比圖Fig.12 Comparison of the results between load and no-load test under Taft wave
根據對比圖可知:在兩種工況下峰值加速度都出現在3.68 s 處,峰值相差15 gal,空載情況下稍大;最大誤差出現在15.80 s 處,為21 gal,最大誤差為14.8%,但是總體上空載和負載狀態下加速度試驗值基本呈現吻合狀態,具有很好的同步性。由于因負載變化而導致控制精度的變化在工程試驗的允許范圍之內,所以設計的振動臺符合大多數工程振動測試試驗要求。
4 結束語
本文以電動伺服系統為激振源,結合計算機控制技術和嵌入式控制技術,研制了一套完全自主知識產權的振動臺系統,并對研制的振動臺進行了關鍵性能測試。對系統的通訊和SD 卡文件數據讀取進行測試,驗證了數據通訊的準確性和快速性;在位置控制模式下對伺服電機控制效果進行測試,驗證了采用位置控制模式的伺服電機控制思路的可行性;以真實激勵信號作為輸入,對振動臺在空載和負載不同工況下波形復現精度進行測試,驗證了整個系統波形復現良好,表明了設計的科學性和適用性,并且兩種不同工況下波形復現誤差較小,進一步驗證了振動臺系統的穩定性。針對振動臺試驗誤差來源進行分析,空載時的試驗誤差主要來源于硬件結構連接之間的摩擦能量損耗、檢測設備存在的信號干擾和振動臺面高速運動時的慣性干擾等系統誤差;負載時的試驗誤差還可能包括負載的固定情況及其試驗中的振動造成的影響。為此,在后期深入研究過程中考慮引入迭代學習等智能控制策略,以完善振動臺控制系統,進一步提高振動臺波形復現精度。總之,本文設計的中小型振動臺系統具有結構精巧、性價比高、控制精度高等優點,在實際振動臺應用領域具有較高的推廣價值,并且為未來中小型振動臺研究提供一定的技術支持和借鑒意義。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25