船身式水陸兩棲飛機(jī)起降飛行仿真研究
2021-03-05 06:35:14王崢華段旭鵬程志航孫衛(wèi)平
航空工程進(jìn)展 2021年1期
王崢華,段旭鵬,程志航,孫衛(wèi)平
(中航通飛研究院有限公司 總體部, 珠海 519040)
0 引 言
水陸兩棲飛機(jī)可以利用船身在水面上起飛著水,在陸上機(jī)場使用專門設(shè)計(jì)的起落架完成地面起降。日本和俄羅斯等國發(fā)展了US-1、US-2、Be-200等成熟的大型水陸兩棲飛機(jī),在該類型飛機(jī)地面、水面操縱特性的適航驗(yàn)證方面建立了完整的技術(shù)體系、積累了豐富的設(shè)計(jì)經(jīng)驗(yàn)。我國在建立水陸兩棲飛機(jī)起降數(shù)學(xué)模型并應(yīng)用到型號方案優(yōu)化設(shè)計(jì)、地面和水面適航條款適航符合性計(jì)算評估等方面的研究尚不完善,與國外存在著一定的差距。以往開展地面和水面操縱特性的適航符合性驗(yàn)證工作直到研發(fā)試飛階段才能開展,如果試飛結(jié)果表明不滿足適航條款要求,再嘗試修改不同的設(shè)計(jì)方案以滿足適航要求,這會付出巨大的時(shí)間代價(jià)和經(jīng)濟(jì)成本。此外,飛機(jī)起降階段的時(shí)間占總飛行時(shí)間的6%,事故率卻占到了80%以上,可見起降階段的飛行安全性研究不容忽視,建立較高精度的水陸兩棲飛機(jī)不同介質(zhì)起降的數(shù)學(xué)模型具有重要意義。
水陸兩棲飛機(jī)水動力的數(shù)學(xué)建模方面,遠(yuǎn)不及氣動力模型研究得深入和成熟,目前針對船體水動力數(shù)學(xué)建模的方法通常為近似計(jì)算公式,主要有:①Savitsky半理論半經(jīng)驗(yàn)水動力計(jì)算方法。D.Savitsky基于滑行平面假設(shè)提出了水動力、水動力矩的計(jì)算方程,并對側(cè)舷浸濕面積、噴濺浸濕面積、噴濺阻力等進(jìn)行了逐步改進(jìn),提高了該方法計(jì)算水作用力的估算精度。②ЦАГИ法。ЦАГИ法與Savitsky方法的區(qū)別在于采用了不同的浸濕面積修正方法。蘇聯(lián)中央空氣動力學(xué)與水動力學(xué)研究院采用平板假設(shè)計(jì)算浸濕面積、升力、縱傾角,提出了棱形艇升力和力矩方程,該方法對滑行艇起滑階段水動力計(jì)算精度較高;董文才等提出了一種ЦАГИ法結(jié)合RANS方程的計(jì)算方法進(jìn)一步提高了水阻力計(jì)算精度。③二維切片理論方法。近似將船體水線以下水流變化等效成無數(shù)個(gè)二維楔形面沖擊水面過程中產(chǎn)生的水流運(yùn)動,作用在船體的總水作用力等于所有二維平面流體作用力的總和。J.A.Keuning使用該方法建立了不規(guī)則波浪上滑行艇六自由度非線性數(shù)學(xué)模型;K.Grame進(jìn)一步改進(jìn)該方法,在模型中增加相關(guān)修正算子以提高數(shù)學(xué)模型對俯仰角運(yùn)動的計(jì)算精度;朱迎谷等基于二維切片理論和Savitsky水動力計(jì)算方法開展了船身型水上無人機(jī)起飛過程的縱向非線性數(shù)學(xué)建模和自動控制律設(shè)計(jì)研究;段旭鵬等針對水上飛機(jī)復(fù)雜外形船體,利用計(jì)算流體力學(xué)技術(shù)對船體切片數(shù)值積分的方法,分析了水面起飛滑行過程中的水動力特性。
水陸兩棲飛機(jī)的起落架不同于常規(guī)陸基飛機(jī),主起落架需在水面運(yùn)行時(shí)收于水線之上,造成了起落架結(jié)構(gòu)高度遠(yuǎn)高于一般陸基飛機(jī);大長寬比的船身又使得起落架主輪距較小。飛機(jī)地面運(yùn)行時(shí)由機(jī)體、起落架支柱、機(jī)輪以及道面等多個(gè)剛體和柔性體組成了多體系統(tǒng)。國外, R.George等、D.H.Klyde等、W.S.Pi等分別對起落架地面運(yùn)動進(jìn)行建模和仿真,并已應(yīng)用于起落架工程設(shè)計(jì)優(yōu)化、地面操縱特性分析之中。國內(nèi),張明等建立了綜合飛機(jī)本體、前輪轉(zhuǎn)彎、防滑剎車的地面運(yùn)動數(shù)學(xué)模型,仿真研究了地面勻速轉(zhuǎn)彎和滑跑剎車的動態(tài)響應(yīng);詹家禮和韓紀(jì)軍等分別在ADAMS、LMS Virtual Lab軟件中建立了水陸兩棲飛機(jī)的起落架系統(tǒng)結(jié)構(gòu)動力學(xué)仿真模型,進(jìn)行了地面滑跑仿真分析;劉海良等利用建立的地面運(yùn)動數(shù)學(xué)模型,通過人機(jī)閉環(huán)數(shù)字飛行仿真評估了民用飛機(jī)地面操縱特性的適航符合性。
在上述研究成果的基礎(chǔ)上,本文從某大型水陸兩棲飛機(jī)適航符合性分析、水面控制律設(shè)計(jì)等工程應(yīng)用的實(shí)際需求出發(fā),利用與上述研究不同的建模方法,分別建立該型飛機(jī)的水動力數(shù)學(xué)模型和起落架數(shù)學(xué)模型;聯(lián)立飛機(jī)本體六自由度飛行力學(xué)模型分別開展水面、陸地的起降飛行仿真,并利用仿真計(jì)算得到的飛機(jī)運(yùn)動參數(shù)與水池試驗(yàn)、飛行試驗(yàn)結(jié)果進(jìn)行對比分析。
1 水動力模型
基于某大型水陸兩棲飛機(jī)水池試驗(yàn)測量的水動阻力、水動升力、浮力等水動力分量(如圖1 所示),建立靜水滑行中的縱向水動力數(shù)學(xué)模型。浮力和浮心的計(jì)算方法主要基于阿基米德定律,文中不再列出其具體公式。
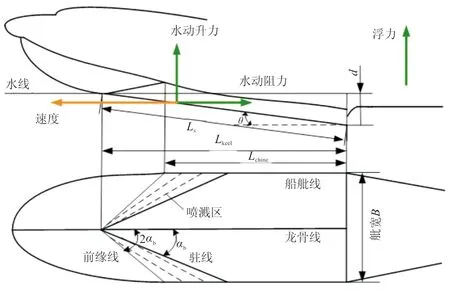
圖1 船體水面運(yùn)動的關(guān)鍵參數(shù)和受力
1.1 水動升力
水動升力與氣動升力產(chǎn)生機(jī)理相似,均與動壓、浸潤面積和升力系數(shù)相關(guān)。水陸兩棲飛機(jī)船體水動升力的計(jì)算表達(dá)式為

(1)
式中:ρ
為水的密度;V
為飛機(jī)速度;S
為浸濕面積,S
=λB
;B
為舭寬;C
w為水動升力系數(shù);θ
為縱傾角;λ
為浸濕長寬比。
(2)
式中:L
為船身平均浸濕長度;L
為龍骨浸濕長度;L
為船舭線浸濕長度;d
為斷階下緣點(diǎn)在水線以下的垂直距離;β
為船體斜升角。1.2 水動阻力
本文所建立的水動阻力D
模型為
(3)
式中:D
為黏性阻力;D
為噴濺阻力;(1+k
)為形狀因子,僅與船體形狀有關(guān),參考與兩棲飛機(jī)船體相似的船模試驗(yàn)結(jié)果,k
修正為0.195。船體底部平均水流速度V
小于飛機(jī)的前進(jìn)速度V
,與機(jī)身底部的平均動壓P
有關(guān),根據(jù)伯努利方程可得:
(4)
噴濺區(qū)面積A
:
(5)
噴濺阻力系數(shù)C
:
(6)
L
為噴濺特征長度;μ
為水的黏性系數(shù),μ
=0.001 002 kg/(m·s)。1.3 水動作用點(diǎn)
水陸兩棲飛機(jī)在水面滑行時(shí)船體底部的水動壓力分布如圖2所示,70%左右的水動壓力分布在滑行面與水面相遇的部位,本文參考蘇聯(lián)中央空氣動力學(xué)與水動力學(xué)研究院的相關(guān)研究成果,其水動壓力中心的計(jì)算公式為

(7)

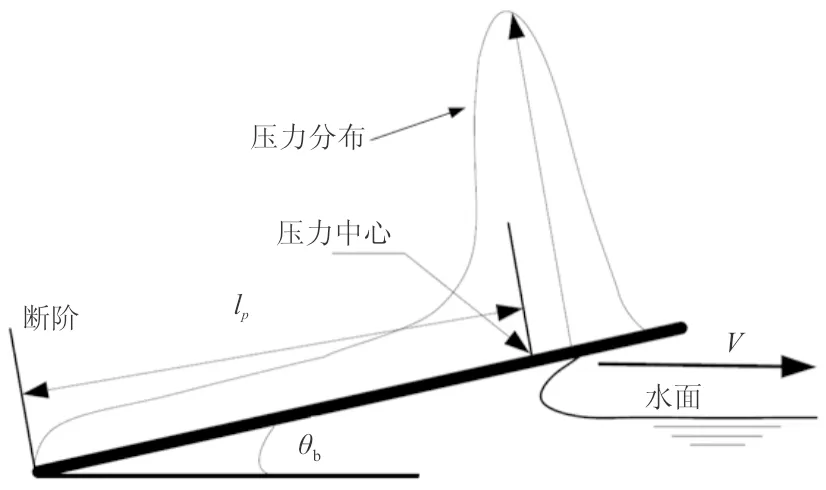
圖2 船體底部的水動壓力分布
2 起落架模型
在某大型水陸兩棲飛機(jī)支柱式起落架建模的過程中,將機(jī)輪、起落架支柱、緩沖器活塞等非彈性支撐質(zhì)量的參考點(diǎn)定位于機(jī)輪軸心處,具有3個(gè)方向的平動自由度,機(jī)輪繞輪軸具有1個(gè)轉(zhuǎn)動自由度。起落架緩沖器沿軸向具有1個(gè)平動自由度,同時(shí)可沿航向和側(cè)向發(fā)生彎曲變形,但不考慮支柱扭轉(zhuǎn)變形。機(jī)體等彈性支撐質(zhì)量為具有3個(gè)方向的平動和3個(gè)轉(zhuǎn)動自由度的剛體,其參考點(diǎn)位于飛機(jī)的重心處。


(a) 第k個(gè)起落架的支柱

(b1) 側(cè)視圖

(b2) 俯視圖
第k
個(gè)起落架支柱在機(jī)輪軸線參考點(diǎn)W
處作用于機(jī)輪的力為
(8)

3 仿真模型
根據(jù)上述水動力模型、起落架模型,結(jié)合飛機(jī)本體飛行力學(xué)仿真模型(包含由風(fēng)洞試驗(yàn)數(shù)據(jù)建立的氣動力模型、發(fā)動機(jī)拉力特性模型等),利用MATLAB/Simulink所建立的仿真軟件(如圖4 所示),可以分別實(shí)現(xiàn)地面和水面起降階段的實(shí)際飛行任務(wù)仿真。
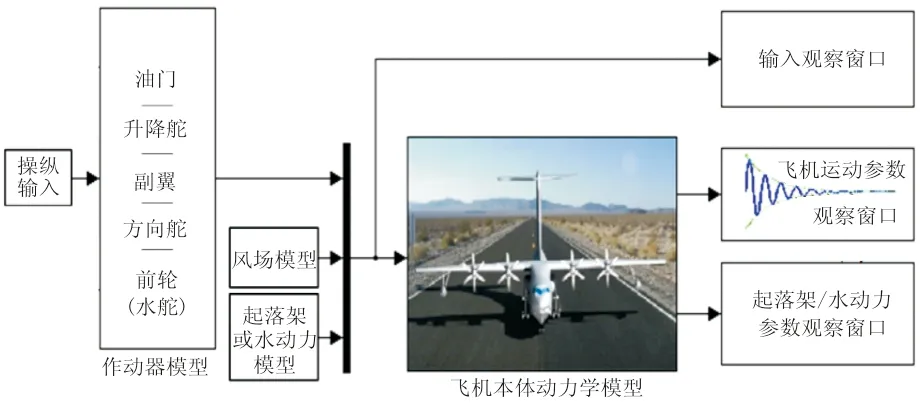
圖4 飛行仿真的結(jié)構(gòu)框圖
4 仿真算例
4.1 水面起飛
本算例計(jì)算某大型水陸兩棲飛機(jī)以給定起飛構(gòu)型(質(zhì)量53 500 kg、重心26%MAC
、襟翼20°)從平靜水面以速度1.5 m/s、起飛功率起飛的過程,升降舵舵面預(yù)置在水池試驗(yàn)偏度-15°。初始配平計(jì)算的俯仰角為2.74°,與水池試驗(yàn)得到的初始浮態(tài)2.75°基本相同。水陸兩棲飛機(jī)水面起飛過程仿真結(jié)果如圖5所示,“計(jì)算值”為利用水動力數(shù)學(xué)模型進(jìn)行飛機(jī)飛行仿真的結(jié)果,“試驗(yàn)值”為飛機(jī)在相同狀態(tài)下的水池試驗(yàn)值,其中水動阻力和水動升力的試驗(yàn)值是基于水池縮比模型試驗(yàn)數(shù)據(jù)換算為實(shí)機(jī)尺寸后的結(jié)果。

(a) 縱傾角

(b) 高度

(c) 速度

(d) 水動阻力

(e) 水動升力
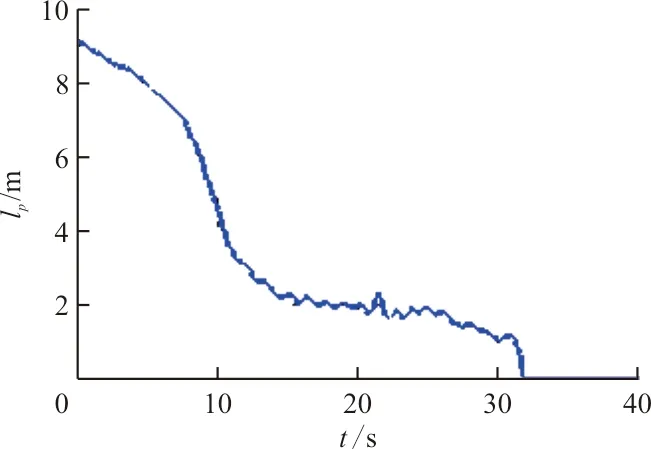
(f) 水動作用點(diǎn)
從圖5可以看出:飛機(jī)在12 s時(shí)達(dá)到縱傾峰,峰值約為6.2°,31 s時(shí)飛機(jī)離水;水面滑行過程中俯仰角處于水池試驗(yàn)穩(wěn)定邊界之內(nèi),不會出現(xiàn)不穩(wěn)定運(yùn)動,符合適航規(guī)范的要求;質(zhì)心高度和速度的變化規(guī)律與試驗(yàn)值相同;水動阻力的峰值與試驗(yàn)值誤差為8.7%;水動力作用點(diǎn)在起飛過程中逐漸向船體斷階移動,也符合理論規(guī)律。
4.2 地面起飛
利用建立的地面仿真模型,計(jì)算大型水陸兩棲飛機(jī)在某次給定起飛構(gòu)型(質(zhì)量48 000 kg、重心25.5%MAC
、襟翼20°、起飛功率)從速度5 m/s開始滑跑起飛的過程,舵面輸入與飛行員操縱時(shí)間歷程相同。初始配平狀態(tài)為俯仰角0.3°、質(zhì)心高度4.37 m。水陸兩棲飛機(jī)地面起飛過程仿真結(jié)果如圖6所示。
(a) 高度

(b) 速度

(c) 升降舵

(d) 俯仰角

(e) 前輪緩沖器行程
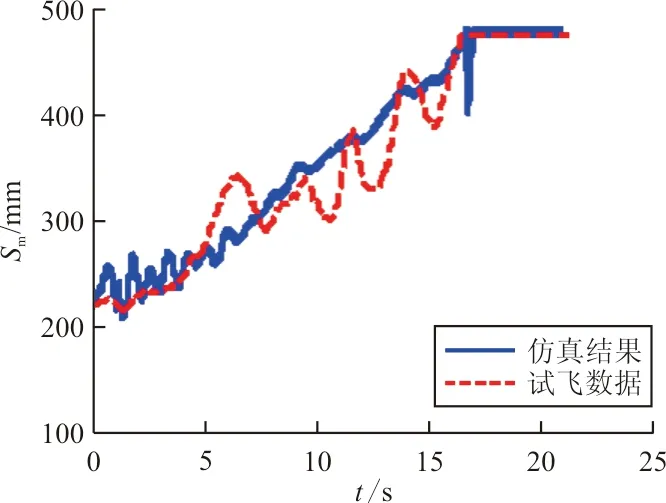
(f) 主輪緩沖器行程
從圖6可以看出:在滑跑、拉桿、離地起飛過程中,飛機(jī)的速度、高度、俯仰角等關(guān)鍵運(yùn)動參數(shù)與試飛數(shù)據(jù)吻合較好;在未拉桿之前隨著速度增加,全機(jī)升力增大使飛機(jī)呈現(xiàn)低頭趨勢,該現(xiàn)象符合一般起飛過程的俯仰角變化趨勢,飛機(jī)沒有前翻傾向能夠滿足適航條款的要求;仿真計(jì)算的前主輪緩沖器的行程變化初始滑跑段有一定誤差,但也基本落在試飛數(shù)據(jù)振蕩曲線之內(nèi)。
5 結(jié) 論
(1) 本文建立的某水陸兩棲飛機(jī)水面運(yùn)動的數(shù)學(xué)仿真方法,可以分析水陸兩棲飛機(jī)在水面滑行過程中受力和運(yùn)動狀態(tài)變量的特征,與水池試驗(yàn)結(jié)果的對比表明,該方法能夠反映飛機(jī)水面滑行過程中運(yùn)動參數(shù)的變化規(guī)律及過程,較為準(zhǔn)確地捕捉到了縱傾峰出現(xiàn)的狀態(tài),可以用于型號飛機(jī)水面操縱特性條款的適航符合性計(jì)算分析、評估和改進(jìn)飛機(jī)設(shè)計(jì)方案、水面控制律設(shè)計(jì)。
(2) 本文建立的某水陸兩棲飛機(jī)地面運(yùn)動飛行力學(xué)仿真數(shù)學(xué)模型考慮了緩沖器、輪胎、支柱的動力學(xué)和運(yùn)動學(xué)關(guān)系。采用數(shù)字飛行仿真可以得到飛機(jī)地面起飛過程中飛機(jī)本體運(yùn)動狀態(tài)變量以及起落架各特征參數(shù)的時(shí)間歷程,該地面仿真方法的計(jì)算結(jié)果與飛機(jī)試飛結(jié)果吻合得較好,達(dá)到了工程應(yīng)用的精度要求,目前已應(yīng)用于型號飛機(jī)地面操縱特性的適航符合性評估、地面控制律設(shè)計(jì)、工程模擬器仿真、指導(dǎo)飛行員試飛操縱程序等方面。
在本文研究工作的基礎(chǔ)上,可以繼續(xù)開展波浪條件下的水動力數(shù)學(xué)建模,進(jìn)一步擴(kuò)大水面仿真的應(yīng)用范圍。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
小學(xué)生導(dǎo)刊(低年級)(2016年8期)2016-09-24 22:09:04