火箭炮彈箱遙操作吊裝技術研究
2021-03-05 14:03:20姜孝旺張建新
兵器裝備工程學報 2021年2期
關鍵詞:活動
姜孝旺,張建新
(湖北江山重工有限責任公司, 湖北 襄陽 441057)
為了提升彈藥裝填效率,新研制火箭炮基本都采用模塊化貯運發(fā)箱式技術[1-2]。貯運發(fā)箱彈藥的裝填是火箭炮作戰(zhàn)使用流程中的重要一環(huán),一定程度上決定了作戰(zhàn)效率和可持續(xù)性[3]。然而現(xiàn)階段的彈藥裝填技術還是比較落后,基本是人工指揮、手工定位裝夾,通常需要5人組成的炮班聯(lián)合操作,效率低、勞動強度大,而且不利于將來炮班人員的精簡。
未來的戰(zhàn)場少人化甚至無人化將是發(fā)展趨勢[4-6],如何在人數(shù)很少(1~2人)或無人的情況下完成彈箱的再裝填將是需要研究解決的難題。考慮到軍用裝備通常需在多種惡劣環(huán)境(如強電磁干擾)下工作,且對安全性的極高要求,在更可靠的人工智能技術出現(xiàn)之前,遙操作手段將是更好的選擇[7-9]。針對這一關鍵需求,運用機器人視覺技術和基于Kinect手勢控制技術對火箭炮彈箱遙操作吊裝技術進行研究。
1 基于Kinect的手勢控制遙操作吊裝方案
基于Kinect的手勢控制遙操作吊裝方案主要包括兩方面的研究內(nèi)容:
一是基于Kinect的動態(tài)手勢識別和控制研究。Kinect是由深度傳感器、RGB攝像頭和多點麥克風陣列組成的三維體感攝像頭,能夠?qū)崟r獲取場景圖像和捕捉語音或者動作輸入等信息。本文針對動態(tài)手勢識別進行研究,實現(xiàn)通過人體的不同手勢對吊臂進行控制。通過對手勢識別系統(tǒng)上位機軟件的設計,將Kinect傳感器識別的手勢轉(zhuǎn)換為控制指令,通過有線或無線通信模塊實現(xiàn)對吊裝系統(tǒng)的控制,其控制原理如圖1,遙操作吊裝程序流程如圖2。

圖1 基于Kinect的手勢遙控制操作原理框圖

圖2 基于Kinect的手勢控制遙操作吊裝程序流程框圖
二是適合遙操作的吊裝系統(tǒng)設計研究。通常情況,火箭炮彈箱特征在其生產(chǎn)定型后就已固定,一個型號火箭炮能裝載的彈箱類型也是確定的,其外形為箱狀,含彈運發(fā)箱重量2噸~5噸。為了吊裝穩(wěn)定,一般需要在箱體重心兩側夾板外側設置起吊點。要使吊具能夠可靠吊裝彈箱涉及到兩個關鍵點,一是吊具能夠與彈箱準確定位對接;二是吊具能夠自動夾緊彈箱,到目標位后,能夠自動放下彈箱,無需任何人工干預,且安全可靠。
2 基于Kinect手勢控制算法
基于Kinect手勢控制算法包含手勢識別和手勢跟蹤兩部分。由于本方案采用的吊裝吊具,不需要進行手勢的抓取控制,只需進行機械臂末端位置的控制,本文采用Kinect稍簡單的骨骼追蹤算法,通過識別與追蹤人體左手骨骼完成遙操作控制,其中仿射變換算法是一種常用的骨骼追蹤算法。
對于三維空間中的點p,設其初始坐標P=(Px,Pv,Pz, 1)T,經(jīng)過仿射變換后的坐標為Q=(Qx,Qv,Qz, 1)T,仿射變換矩陣M。平移變換的仿射變換矩陣如式(1)所示、縮放變換的仿射變換矩陣如式(2)所示、剪切變換的仿射變換矩陣如式(3)所示。

(1)

(2)

(3)
旋轉(zhuǎn)變換的仿射變換矩陣如式(4)所示。
(4)
平移變換后Q=(Px+a,Pv+b,Pz+c,1)T,表示點p在x、y、z三軸上各移動了a、b、c個單位距離;縮放變換后Q=(aPx,bPv,cPz),表示點p在x、y、z三軸上各縮放了a、b、c倍大小;剪切變換后Q=(Px,Pv+bPz,cPz,1)T,表示點p在y軸的坐標;旋轉(zhuǎn)變換后,點p在x、y、z三軸上依次旋轉(zhuǎn)α、β、γ角。
只要求出模型的仿射變換矩陣,就可以將模型中的頂點變換到目標位置。通過求解形變圖中每個頂點的仿射變換矩陣,將形變圖頂點移動到目標位置,再利用形變圖頂點和原模型中的頂點之間的近鄰關系,求解原模型中頂點移動后的位置,模型中每個頂點的形變都是一種仿射變換。
3 適合遙操作吊裝的吊具設計
3.1 原理與結構介紹
設計原理:在箱體外側裝夾,采用剪叉原理,機構聯(lián)動,使定位錐銷、吊鉤、起吊橫桿連為一體,在重力作用下,越拉越緊。采用棘爪、固定塊、活動塊結構,通過三者的聯(lián)合使用,實現(xiàn)吊鉤的的自動夾緊和松開。方案示意圖如圖3。
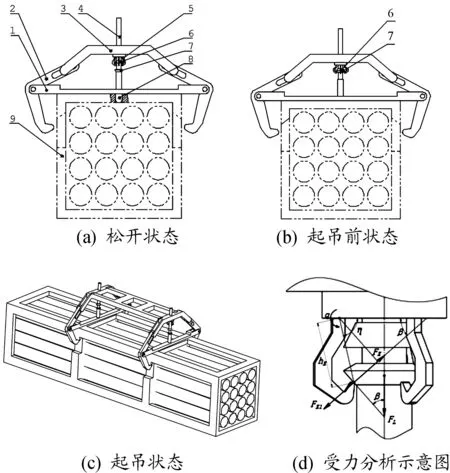
1-橫桿;2-吊鉤;3-起吊橫桿;4-立柱;5-棘爪;6-固定塊;7-活動塊;8-錐銷;9-運發(fā)箱
運發(fā)箱自動吊裝裝置主要由橫桿1、吊鉤2、起吊橫桿3、立柱4、棘爪5、固定塊6、活動塊7、錐銷8組成。其中,橫桿1兩側設有對稱的與其鉸接的吊鉤2,中間上部固連有立柱4,下部固連有錐銷8。
吊鉤2上部有槽孔,與起吊橫桿3兩端的銷柱配合;起吊橫桿3連同固連在其中間的棘爪5,可沿立柱4上下移動,棘爪5為彈性件,只能提供很小的夾緊力。
固定塊6固連在立柱4上,活動塊7可在固定塊6和立柱4的臺階中間沿立柱4上下移動。
固定塊6的下端內(nèi)側具有與棘爪5末端相配合的圓錐臺形空腔,活動塊7的下端為倒圓錐臺形,兩者配合后,在橫桿1、吊鉤2、立柱4重力作用下,棘爪5末端便會打滑越過固定塊6。
起吊橫桿3在立柱4上的滑動受棘爪5的限制,而棘爪5的上下位置最終是通過活動塊7的上下移動決定,由此實現(xiàn)整個吊裝裝置的自動夾緊與松開。
3.2 具體實施方式
圖3(a)為松開狀態(tài)。此時,棘爪5末端鉤住固定塊6,吊鉤2處于張開狀態(tài),整個吊裝裝置在機械臂的自動控制下,錐銷8插入運發(fā)箱9的圓孔。
圖3(b)為起吊前狀態(tài)。在(a)狀態(tài)下,起吊橫桿3在機械臂作用下繼續(xù)下移,棘爪5跟著下移并夾住活動塊7,棘爪5提起活動塊7沿立柱上移至固定塊6處。
圖3(c)為起吊狀態(tài),在(b)狀態(tài)下,起吊橫桿3繼續(xù)上移,棘爪5無法承受橫桿1、吊鉤2、立柱4的重力而打滑,從而越過固定塊6,起吊橫桿3兩端的銷柱拉動吊鉤2,吊鉤2下端掛鉤便繞鉸接軸內(nèi)轉(zhuǎn)掛住運發(fā)箱9的起吊掛鉤,而同時活動塊7自由滑落到立柱4的臺階處。
當?shù)踔聊繕宋缓螅鸬鯔M桿3在機械臂作用下下移越過固定塊6,起吊橫桿3兩端的銷柱帶動吊鉤2繞鉸接軸外轉(zhuǎn)而松開,再上移起吊橫桿3,此時,棘爪5末端鉤住固定塊6,繼續(xù)上移起吊橫桿3,便可帶動整個裝置脫離運發(fā)箱。
3.3 計算分析
該機構實際上是將起吊橫桿的豎直運動轉(zhuǎn)化為吊鉤的繞鉸接軸的轉(zhuǎn)動,通過棘爪、活動塊、固定塊三者的關系進行不同位置轉(zhuǎn)換,最終達到吊鉤松開和夾緊彈箱的功能,其核心在于棘爪夾緊力的控制以及吊鉤夾緊與起吊動作的可靠性。現(xiàn)分析影響棘爪和吊鉤性能的主要參數(shù),為不同彈箱的吊具設計提供理論依據(jù)。
3.3.1棘爪扭矩分析
起吊時棘爪要夾住并提起活動塊;當活動塊與固定塊接觸配合后,棘爪在橫桿、立柱、吊鉤等部分的重力作用下張開而越過固定塊,使吊鉤夾緊彈箱。為使吊具正常工作,棘爪夾緊力的控制至關重要,也即控制棘爪扭矩。棘爪扭矩與活動塊的下錐度大小存在一定的對應關系,如3.1節(jié)圖3(d)所示,具體推導如下。其中:q為棘爪扭矩,hz為棘爪對活動塊作用點與回轉(zhuǎn)中心的距離,η為棘爪作用線初始角度,β為活動塊圓錐半頂角(錐度為2tanβ),F(xiàn)z為棘爪對活動塊作用力,F(xiàn)z1為活動塊對棘爪的反作用力。
如3.1節(jié)圖3(b)起吊前狀態(tài)所示,為完成棘爪提起活動塊沿立柱上移至固定塊處的動作,需要使該過程中棘爪對活動塊的作用力大于活動塊的重力,故要滿足下式
G活動塊<3Fzsinβ
如3.1節(jié)圖3(c)起吊狀態(tài)所示,為使棘爪越過固定塊,需要使該過程中棘爪對活動塊的作用力小于固定塊、活動塊、立柱、橫桿和吊鉤的重力(不計摩擦),以便吊鉤夾緊彈箱。故要滿足下式
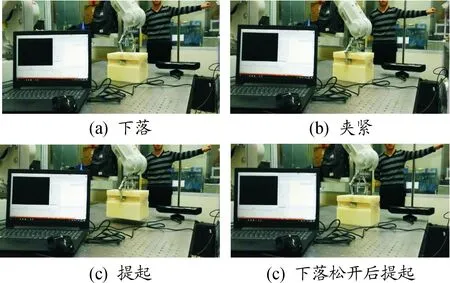
3Fzsinβ G活動塊+G固定塊+G立柱+G橫桿+2G吊鉤 理想狀況下只需控制棘爪扭矩大于最小扭矩,該機構即可實現(xiàn)功能,且扭矩越小,棘爪與活動塊和固定塊的摩擦力越小,棘爪壽命越長。但實際工況會伴隨振動和過載,為留有安全余量,同時考慮到棘爪扭簧制造難度,建議取棘爪扭矩為100 N·mm。 3.3.2吊鉤轉(zhuǎn)角相關的定量關系 起吊橫桿的豎直運動使吊鉤旋轉(zhuǎn)一定角度,從而改變吊鉤底端橫向位移,實現(xiàn)夾緊與松開,故起吊橫桿垂直位移e、吊鉤轉(zhuǎn)角θ、吊鉤底端橫向位移L(如圖4所示)之間的關系較為關鍵。其中:h0為銷柱初始高度,h1為吊鉤底端初始高度,e為起吊橫桿垂直位移,L為吊鉤底端橫向位移,L1為吊鉤上部長度,L2為吊鉤下部長度,θ2為吊鉤上部初始角度,θ1為吊鉤下部初始角度,θ為吊鉤轉(zhuǎn)角。 起吊橫桿垂直位移e與吊鉤轉(zhuǎn)角θ的關系為 即e=L2sinθ2-tan(θ2-θ)·L2cosθ2 吊鉤底端橫向位移L與吊鉤轉(zhuǎn)角θ的關系為 L=L1cosθ1-L1cos(θ1+θ) 吊鉤底端橫向位移L與起吊橫桿垂直位移e的關系為 圖4 轉(zhuǎn)角相關的定量關系示意圖 根據(jù)某產(chǎn)品運發(fā)箱的尺寸及重量,制作了1:5縮比吊具及運發(fā)箱模型(適應實驗室機器人承載能力),利用Kinect相機機器骨骼識別算法,通過識別與追蹤人體手掌骨骼坐標,實時控制機械臂位置,從而進行吊具的遙操作無人吊裝作業(yè),用以驗證實際吊裝效果,試驗平臺如圖5所示。試驗方法流程如圖6所示,試驗結果如圖7所示。 從試驗驗證結果來看,該吊具原理可行,動作可靠,完全可以滿足無人化操作要求。 圖5 試驗平臺 圖6 試驗驗證流程框圖 圖7 試驗結果 根據(jù)火箭炮彈箱結構特點設計一種適合無人操作的專用吊具;通過Kinect傳感器識別手掌骨骼動作信息,將識別的動作信息轉(zhuǎn)化為指令信息,控制機器人機械臂進行吊裝動作。利用實驗室ABB機械臂和Kinect相機進行了遙操作控制試驗,結果表明該原理是可行的,為火箭炮的少人化和無人化做出技術儲備。 下一步將繼續(xù)進行彈箱識別、定位、起吊系列試驗,并在控制魯棒性和實時性及提高工作效率方面進行深入研究。


4 實驗


5 結論
猜你喜歡
齊魯師范學院學報(2022年5期)2022-10-13 10:04:18
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
天津音樂學院學報(2021年4期)2022-01-08 02:18:52
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
海峽姐妹(2018年3期)2018-05-09 08:20:40
質(zhì)量與標準化(2015年8期)2015-07-18 11:11:08
質(zhì)量與標準化(2015年12期)2015-07-10 15:11:50
