DJI精靈4RTK免像控的誤差較大原因及分析
2021-03-07 12:17:58趙衛國龐震
家園·建筑與設計 2021年18期
趙衛國 龐震
摘要:DJI 精靈4RTK是2018年8月發布的DJI邁向測繪行業的第一款專業設備,由于低廉的價格,在測繪無人機行業極大的降低了航空攝影測量門檻,又由于完善的維修服務方式,徹底改變了原無人機攝影測量系統高價,維修成本高的現狀,為推動航空攝影測量做出了巨大的貢獻。但是,通過我公司近四年的使用,我們發現,該無人機設備在實際使用過程中,其精度無法滿足免像控。
關鍵詞:DJI 精靈4RTK;免像控
引言
在航空攝影測量的眾多產品中,我們會常見對地面分辨率及航高的對應表達,來描述無人機攝影測量系統的精度。
1無人機地面分辨率在精度上的影響因素
1.1相機分辨率及航高對精度的影響
影響航測相機的采集精度的主要因素為:畸變與測量方式。
畸變只能盡可能縮小,不存在完全消除,常見的評定方式為畸變不超過3%,我們就可以認為是已經滿足航測軟件的要求。
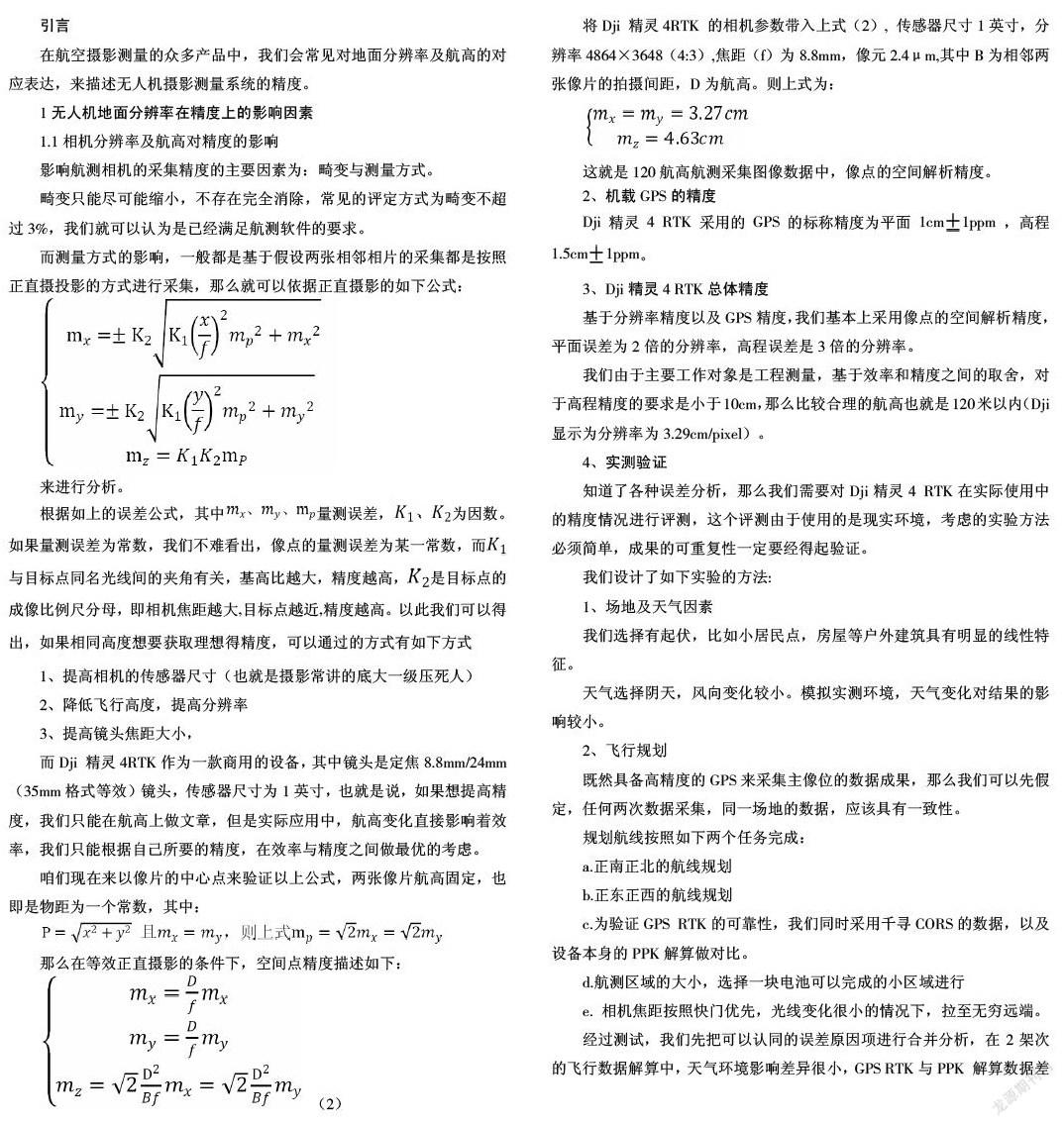
而測量方式的影響,一般都是基于假設兩張相鄰相片的采集都是按照正直攝投影的方式進行采集,那么就可以依據正直攝影的如下公式:
根據如上的誤差公式,其中 量測誤差, 為因數。如果量測誤差為常數,我們不難看出,像點的量測誤差為某一常數,而 與目標點同名光線間的夾角有關,基高比越大,精度越高, 是目標點的成像比例尺分母,即相機焦距越大,目標點越近,精度越高。以此我們可以得出,如果相同高度想要獲取理想得精度,可以通過的方式有如下方式
1、提高相機的傳感器尺寸(也就是攝影常講的底大一級壓死人)
2、降低飛行高度,提高分辨率
3、提高鏡頭焦距大小,
而Dji 精靈4RTK作為一款商用的設備,其中鏡頭是定焦8.8mm/24mm(35mm格式等效)鏡頭,傳感器尺寸為1英寸,也就是說,如果想提高精度,我們只能在航高上做文章,但是實際應用中,航高變化直接影響著效率,我們只能根據自己所要的精度,在效率與精度之間做最優的考慮。
咱們現在來以像片的中心點來驗證以上公式,兩張像片航高固定,也即是物距為一個常數,其中:
這就是120航高航測采集圖像數據中,像點的空間解析精度。
2、機載GPS的精度
Dji精靈4 RTK 采用的GPS的標稱精度為平面1cm 1ppm ,高程1.5cm 1ppm。
3、Dji精靈4 RTK總體精度
基于分辨率精度以及GPS精度,我們基本上采用像點的空間解析精度,平面誤差為2倍的分辨率,高程誤差是3倍的分辨率。
我們由于主要工作對象是工程測量,基于效率和精度之間的取舍,對于高程精度的要求是小于10cm,那么比較合理的航高也就是120米以內(Dji顯示為分辨率為3.29cm/pixel)。
4、實測驗證
知道了各種誤差分析,那么我們需要對Dji精靈4 RTK在實際使用中的精度情況進行評測,這個評測由于使用的是現實環境,考慮的實驗方法必須簡單,成果的可重復性一定要經得起驗證。
我們設計了如下實驗的方法:
1、場地及天氣因素
我們選擇有起伏,比如小居民點,房屋等戶外建筑具有明顯的線性特征。
天氣選擇陰天,風向變化較小。模擬實測環境,天氣變化對結果的影響較小。
2、飛行規劃
既然具備高精度的GPS來采集主像位的數據成果,那么我們可以先假定,任何兩次數據采集,同一場地的數據,應該具有一致性。
規劃航線按照如下兩個任務完成:
a.正南正北的航線規劃
b.正東正西的航線規劃
c.為驗證GPS RTK的可靠性,我們同時采用千尋CORS的數據,以及設備本身的PPK解算做對比。
d.航測區域的大小,選擇一塊電池可以完成的小區域進行
e. 相機焦距按照快門優先,光線變化很小的情況下,拉至無窮遠端。
經過測試,我們先把可以認同的誤差原因項進行合并分析,在2架次的飛行數據解算中,天氣環境影響差異很小,GPS RTK與PPK 解算數據差異很小,地面分辨率差異很小,相機焦距按照快門優先,光線變化很小的情況下,拉至無窮遠端,相機的影響因素也可以忽略,也就是去掉各種外在的影響,現在2個架次任務之間的外在影響均不需考慮,只需要考慮設備本身內在的各種誤差了。那么重點來了,這兩個架次數據經過同一軟件的處理,同一點位的空間解析數據相互之間是否存在差異,設備的自洽能力,就成了主要因素。
采用軟件為PIX4D,用時幾乎相當,飛行中航向及旁向重疊率均考慮按照75%來考慮,像片數量略有差異,但對解算時長來說,差異不大!
所有解算結果加入該區域的七參數,以確保兩個架次得到的當地坐標系數據,都能真實準確的反映出實際飛行中采集POS數據。
解算出點云數據(*.Las),將las數據導入緯地道路設計軟件,建立地面數據模型,根據劃定的道路中線,提取不同的縱斷面、橫斷面數據作為對比。
同一道路,基于不同架次飛行采集的數據,提取的縱斷面數據從30-60cm,無明顯規律。
該數據對比反映出,同一位置,不同架次,數據之間,不具備重復性,因而,我們判定Dji精靈4 RTK,在120米航高的情況下,無法滿足免像控的要求。
原因分析
1、相機畸變參數的影響
相機畸變的影響只能減小不可能消除,基本各種軟件對畸變參數的要求,基本上都在3%以內,可以認同為相機畸變參數正常。該參數伴隨著使用環境,氣候,光線變化,景深等,都具有可變性,單純理解靠修改畸變參數解決Dji精靈4 RTK精度問題,是不具備現實意義的方法。
2、GPS RTK 精度的影響
DJI宣稱毫秒級快門,那么就只剩下機載的GPS設備誤差這一原因啦!
但是要證明這個設備的GPS有問題,我們嘗試了很多辦法,譬如:
1、設置旋轉圓盤,讓無人機相機垂直向下,旋轉中心與相機的鏡頭中心一致,來定時拍攝,存取GPS數據以檢查其位移,但是空中姿態,遠遠沒有這樣平穩,而且振動也不在一個層級上,所以以失敗告終。
2、想通過在鏡頭信號線端與GPS數據采集端之間,安裝邏輯分析儀,以確定拍照時刻,兩者的同步性,由于飛機形體太小,內部空間有限,無法將這些設備攜帶到空中,也告以失敗。我們發現,造成這一原因的結果只有一個,那就是Dji精靈4 RTK的GPS設備,在空中姿態下的數據采集存在問題。
該檢測的主要思路延續了上面詳述的檢測方式,就是同一設備,在幾乎同等的條件下,南北向規劃航線采集的影像數據與東西向規劃航線采集的數據應具有一致性,也就是首先需要達成的是設備能自圓其說,然后才具備精度一致性。
所以,我們公司的結論是:如果咱們把免像控的精度對應到,實際平面坐標在5cm,高程在10cm的具體數值上,那么可以肯定的說,DJI 精靈4 RTK 是無法滿足免像控條件的。
(以上結論均有實測數據支持,如有需要請聯系:928925819@qq.com)
參考文獻
[1] 張劍清 潘勵 王樹根. 攝影測量學 (第二版)作者:張劍清潘勵王樹根,出版社:武漢大學出版社, ISBN:9787307069558
3385500589259
