高旋掠飛彈載激光雷達對地面裝甲目標的分割與識別
2021-03-09 09:19:16蔣罕寒武軍安
激光與紅外 2021年2期
蔣罕寒,郭 銳,武軍安,趙 旭
(1.南京理工大學 智能彈藥技術國防重點學科實驗室,江蘇 南京 210094;2.北京信息科技大學 高動態導航技術北京市重點實驗室,北京 100101)
1 引 言
傳統末敏彈在發揮良好作戰效能的同時,仍存在部分缺陷。一是作用過程復雜,增加了各部分的設計制造難度;二是在穩態掃描階段存在落速較慢、滯空時間長、受風影響大等缺點[1]。針對這些缺點,已有許多主動防御末敏彈的研究[2],這大大降低了末敏彈在戰場上的威懾力。針對這一問題,高旋掠飛彈藥[3]成為最新的研究方向之一。
有別于一般末敏彈的工作原理,高旋掠飛彈藥具有打擊速度快、掃描范圍廣等作戰特點[4]。為了適應高旋掠飛彈藥高速、高轉速的飛行特點,要求彈載的激光雷達掃描頻率足夠高、響應時間足夠快,因此選用具有高精度、高分辨率及高抗光電干擾能力[5]的高重頻的單元激光雷達作為敏感裝置。單元激光雷達可以獲取目標的一維距離像,從而結合目標的特征對目標進行提取與識別。
目前基于單元激光雷達的目標分割與識別主有以下研究成果。莊秀華[6]等人基于不同類型障礙物的表面特征提出了一種最近鄰聚類算法,利用相鄰兩點的距離對障礙物進行聚類;劉偉[7]等人提出了改進的凝聚層次聚類算法對地面目標進行聚類分割,再基于SVM方法對車輛目標進行識別;梁雄[8]等人提出了基于ABD算法檢測分割點后再次分割聚類判定的方法,提高了對地面目標的分割準度。孔棟[9]等人利用局部均值變點統計進行標記提取,最后基于最大期望聚類識別車道標線。
高旋掠飛彈藥特定的掃描特點導致一維點云數據稀疏、密度低,因此以上各種算法都能較好地解決各自領域中的問題,卻不適用于搭載單元激光雷達的高旋掠飛彈藥。本文結合其穩態掃描特點,提出一種對地面裝甲目標提取方法。
2 提取方法處理流程與思路
斜置在彈頭部的單元激光雷達工作時跟隨彈丸同時做旋轉和水平飛行運動。如圖1所示,高旋掠飛彈藥穩態掃描階段掃描線終點的軌跡線為螺旋線。其螺距取決于彈丸的飛行速度、轉速、飛行高度以及單元激光雷達的采樣頻率。為了探測時不遺失目標,彈丸設計時應保證螺距寬度盡量小于裝甲目標的長度。
當高旋掠飛彈藥進入穩態掃描階段時,其轉速、飛行速度及高度基本保持不變。單元激光雷達每一個采樣時間內可以獲取一條掃描線數據ρ。ρ為雷達接收單元測得的距離值。基于公式(1)將一維距離像轉化為如圖2所示的以彈體質心為原點的xy坐標系中的二維點云數據。
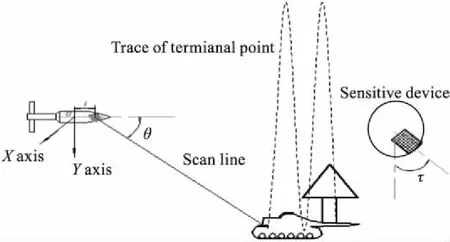
圖1 高旋掠飛彈藥掃描示意圖
(1)
其中,θ為彈體與敏感器軸線間的夾角;τ為敏感器軸線在垂直于彈體軸線方向的投影與鉛錘線的夾角;H為飛行高度。

圖2 實測點云數據
探測時,螺旋線可能會多次掃過裝甲目標。為保證起爆的時效性,在螺旋線第一次掃過目標后,此時應有效識別目標。螺旋線掃描一周時還會掃描地面、房屋及樹木等其他非目標信息。如何快速準確的分離并識別目標是本算法的最終目的,因此文中提出的分割與識別方法流程如下:
(1)基于梯度分割。將經過去燥、濾波及坐標轉化后的點云數據初步分割,獲取初始聚類數與聚類中心。
(2)優化分割。裝甲目標存在不連續界面,僅依據梯度分割會分割裝甲目標。采用改進的kmeans算法調整上述分割結果。
(3)識別裝甲目標。根據裝甲目標的真實特征與分割出的聚類目標的特征進行匹配分析,進而識別出裝甲目標。
為驗證算法的有效性,搭建實驗室半仿真平臺,模擬高旋掠飛彈藥穩態掃描探測過程。采用縮比實驗的方法,按100∶1的比例在保證速度/轉速比保持不變(保證掃描螺距不變)的前提下縮小速度、轉速與飛行高度;按1∶30的比例縮小裝甲目標與障礙物,布置實驗場景。具體實施方式如圖3所示。

圖3 實驗裝置圖
3 具體流程
3.1 基于梯度的自動生長預分割處理
一維距離像經去噪、坐標轉化后,其結果表征的是反射點離地距離及距離彈體軸線的水平距離。對應的高度及水平位置數據為:
(2)
其中,xi,yi分別為上述二維彈體坐標系中X,Y軸數據。
在三維空間中,裝甲目標往往與障礙物的高度不同,即裝甲目標邊緣和與其鄰近的目標邊緣存在較大高度變化。圖4是由式(3)根據圖2數據計算出的梯度值圖。
Gi={H[i+1]-H[i],i=1~n}
(3)
其中,G是當前采集點與其鄰點的高度梯度值。

圖4 梯度值圖
可以看出,相鄰兩點位于同一物體時梯度較小,位于不同物體時梯度較大,進而采用種子自動生長的方式,以梯度作為判斷依據,將數據劃分成不同的簇。
具體策略是先將第一個點作為種子,計算與其相鄰點的梯度值并與預先設定的的梯度閾值Gmax進行比較,將梯度值小于梯度閾值的點與當前種子歸于同一簇;將首次出現的不屬于該簇的點作為新種子,繼續生長,直至將點云分割成不同的簇。圖5是上述算法分割后的結果。


圖5 預分割效果圖
3.2 改進kmeans算法優化分割
然而僅通過梯度進行聚類分割存在一定的缺陷。受掃描方位的影響,掃過裝甲目標的掃描線會被切斷,即采集于裝甲目標上的點不連續。中斷的位置梯度值較高進而影響分割結果。圖6是基于梯度分割后的結果,顯然裝甲目標上的點被分成兩簇。

圖6 分割示例圖
特定的彈載工況下激光雷達掃描半徑較大且激光雷達的采樣頻率因現有工藝及結構尺寸受到限制,彈丸旋轉一周采集到的點云數據較為稀疏。進而選用改進的kmeans算法對聚類結果進行迭代優化。kmeans算法是以誤差平方和最小準則作為聚類標準。先選定k個初始聚類中心c1,c2,…,ck。將點云中的每一點按照最小距離原則分配給各聚類中心。若:
||ρ-ci||<||ρ-cj||
(4)
其中,i,j=1,2,…,k,i≠j。則ρ∈f(i),f(i)表示以第個i聚類中心為中心的聚類集。
分配完成后,按式(5)重新計算聚類中心:
(5)
其中,Ni為第i個聚類集f(i)中點的個數。按新的聚類中心計算誤差平方和J:
(6)
多次迭代,當誤差平方和不變時,跳出迭代,計算完畢,此時輸出的是滿足誤差最小標準的k個聚類。kmeans算法最顯著的缺點是初始聚類數k必須事先給定,一旦選擇的k值不合理,得到的聚類結果就會存在較大誤差。改進方式為:
(1)以梯度分割時記錄的種子數量作為初始聚類數
k={num(seeds)}
(7)
(2)以梯度分割得到的聚類集數據中點作為初始聚類數
ci={(ρfirst+ρend)/2,ρ∈f(i)}
(8)
其中,i=1~k;ρfirst,ρend是聚類集f(i)中第一個(即種子)及最后一個被聚類的點。
(3)設置簇間最小距離度量d
d(ci,cj)={minp?cip′?cj||p-p′||}
(9)
其中,i,j=1~k,i≠j;ci,cj是兩個簇;||p-p′||是兩個點p和p′間的距離。
當輸出滿足誤差最小的k個聚類后,計算簇間最小距離度量并與預設的簇間距離閾值dmax比較,若滿足:
d(ci,cj) (10) 則將ci;cj歸于一類,并將聚類數k減一。重新計算聚類中心,繼續迭代,直至簇間最小距離均小于簇間距離閾值,退出迭代。此時分類即是最合理的分類。 圖7為改進的kmeans算法優化分割后的效果圖,可以看出裝甲目標上的點被聚為一簇。經過大量數據分析,優化分割后,分割準確率從61.34 %提高到了83.57 %,性能提升明顯。 圖7 優化分割后的效果圖 通過上述分割算法分離出的目標還需要進一步識別。上述一維點云數據包含以下特征: (1)聚類點云個數; (2)反射點距地高度信息; (3)反射點水平位置信息; 為有效識別裝甲目標,先計算聚類目標點集平均高度與最大寬度,再統計該聚類目標中處于預設定高度區間的點數。接著與裝甲目標真實特征進行比對。為了量化分析,這里引入特征匹配相似度p。 p=(sh+sw+sn)/3 (11) 其中,sh,sw與sn分別為分割出目標的高度、寬度與點數與其真實值的相似比。 (12) 其中,havg,wavg與navg是真實平均高度、寬度與點數,實驗時值為10 cm,10 cm,10。hk、wk與nk是聚類k計算出的高度、寬度與點數。 (13) 其中,xkmax,xkmin是聚類點集中水平距離的極大與極小值。f(k)是上述分割聚類點集高度值;nk是該集合點集個數。hmin,hmax是依據裝甲目標預設的高度區間,實驗取值為8 cm,12 cm。 若相似度p>75 %,則認為提取出的目標為裝甲目標。為了驗證本文算法在不同條件下的適用性,實驗按梯度設置了不同高度、視場角條件下計算相似度p。具體參數與結果如表1、表2所示。由表中數據可以得出此算法能有效識別提取地面裝甲目標。 表1 不同高度下分割出的目標高度、寬度與點數及相似度 表2 不同視場角下分割出的目標高度、寬度與點數及相似度 通過理論分析研究現狀,實驗室采集實測數據并應用本方法對數據進行處理,驗證了本方法能有效的分割并提取地面裝甲目標,50°斜置角下相似度可達到87 %以上,從而為高旋掠飛彈藥的總體設計奠定基礎。由于本文數據均是模擬平臺下獲取,還需要進一步獲取外場實彈數據進行驗證。此外,為提高高旋掠飛彈藥探測識別能力,接下來應考慮多種探測方式進行復合制導。
3.3 特征匹配識別裝甲目標


4 結 論
