全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)的構(gòu)建方法及其在地鐵監(jiān)測(cè)中的應(yīng)用*
2021-03-11 07:39:56廖根根吳國(guó)慶
工程技術(shù)研究 2021年3期
段 磊,廖根根,彭 靜,凌 濤,吳國(guó)慶
1.中鐵五局集團(tuán)第一工程有限責(zé)任公司,湖南 長(zhǎng)沙 410117
2.湖南信息學(xué)院商學(xué)院,湖南 長(zhǎng)沙 410151
隨著科學(xué)技術(shù)和社會(huì)經(jīng)濟(jì)的不斷發(fā)展,工程建設(shè)復(fù)雜程度逐漸提升。在工程施工、運(yùn)營(yíng)期間,天氣、地質(zhì)、施工以及運(yùn)營(yíng)等因素都會(huì)對(duì)工程建筑的穩(wěn)定性產(chǎn)生影響,使其發(fā)生形變甚至破壞。為保障人們的生命、財(cái)產(chǎn)安全,必須及早發(fā)現(xiàn)問(wèn)題并采取相應(yīng)的解決措施。自動(dòng)監(jiān)測(cè)技術(shù)指的是一種周期性監(jiān)測(cè)建筑工程安全性的重要監(jiān)測(cè)技術(shù),可以有效避免一些安全隱患發(fā)生。近年來(lái),在相關(guān)研究人員的共同努力下,推出了不同功能的自動(dòng)監(jiān)測(cè)系統(tǒng),但是隨著建筑領(lǐng)域?qū)ψ詣?dòng)監(jiān)測(cè)系統(tǒng)的要求越來(lái)越高,這些監(jiān)測(cè)系統(tǒng)在數(shù)據(jù)信息傳輸、數(shù)據(jù)處理等方面存在問(wèn)題較多。為豐富全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)的功能,避免有線傳輸方式受距離使用限制,提高數(shù)據(jù)處理效率,文章提出了基于全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)的構(gòu)建方法并對(duì)其在地鐵監(jiān)測(cè)中的實(shí)踐進(jìn)行研究。
1 自動(dòng)監(jiān)測(cè)系統(tǒng)
1.1 系統(tǒng)硬件
該系統(tǒng)硬件主要包括供電設(shè)備、通信設(shè)備、計(jì)算機(jī)、全站儀、基準(zhǔn)點(diǎn)、監(jiān)測(cè)點(diǎn)等。其中,核心傳感器為全站儀。
(1)全站儀。為了滿足智能化監(jiān)測(cè)需求,該系統(tǒng)選取型號(hào)為徠卡TS15A全站儀作為主要測(cè)量?jī)x器。該儀器具有自動(dòng)校準(zhǔn)、精細(xì)跟蹤鎖定、聯(lián)機(jī)控制等功能,不僅在普通測(cè)量工程中得以廣泛應(yīng)用,還可以解決一些特殊工程測(cè)量問(wèn)題。
(2)通信設(shè)備。目前,大部分?jǐn)?shù)據(jù)信息傳輸設(shè)備采用的傳輸方式為有線傳輸模式,這種傳輸不適用于遠(yuǎn)距離傳輸。為了解決這一問(wèn)題,必須將無(wú)線傳輸技術(shù)融入系統(tǒng)開(kāi)發(fā)。文章開(kāi)發(fā)的全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)將應(yīng)用到地鐵形式環(huán)境中,因?yàn)楸O(jiān)測(cè)面積較大,所以首選移動(dòng)網(wǎng)絡(luò)技術(shù)。移動(dòng)網(wǎng)絡(luò)傳輸技術(shù)優(yōu)勢(shì)在于成本低、速度快、穩(wěn)定性好等。
(3)基準(zhǔn)點(diǎn)的選擇。基準(zhǔn)點(diǎn)是變形監(jiān)測(cè)的基礎(chǔ),基準(zhǔn)點(diǎn)應(yīng)布設(shè)在變形體或變形區(qū)之外,且地質(zhì)情況良好不易破壞的地方。但從地鐵建成后的情況來(lái)看,基準(zhǔn)點(diǎn)設(shè)置在地鐵外是不可取的。考慮到地鐵車站所處的地質(zhì)條件一般較好,遇到不良地質(zhì)段,也都進(jìn)行了地基加固處理,發(fā)生變形的可能極小,將基準(zhǔn)點(diǎn)設(shè)置在車站上,并定期與高等級(jí)控制點(diǎn)進(jìn)行聯(lián)測(cè)。
(4)監(jiān)測(cè)點(diǎn)的布設(shè)。因測(cè)量環(huán)境開(kāi)闊,需要布置較多監(jiān)測(cè)點(diǎn)。在監(jiān)測(cè)地鐵過(guò)程中,位于同一側(cè)的監(jiān)測(cè)點(diǎn)比較多,很有可能出現(xiàn)ATR照錯(cuò)棱鏡現(xiàn)象,為避免重測(cè)或漏測(cè)情況發(fā)生,利用徠卡TS15A全站儀望遠(yuǎn)鏡小視場(chǎng)功能,解決測(cè)量空間狹窄、棱鏡多,無(wú)法確定應(yīng)測(cè)量哪一個(gè)棱鏡的問(wèn)題。隧道內(nèi)全站儀視角圖如圖1所示。圖1中B點(diǎn)為地鐵隧道中全站儀所處位置,隧道壁與儀器測(cè)站點(diǎn)之間的垂直距離為H,望遠(yuǎn)鏡的正常視角設(shè)定為α,觀測(cè)距離設(shè)定為D,通過(guò)計(jì)算可以獲取全站儀視場(chǎng)范圍長(zhǎng)度I,對(duì)應(yīng)的計(jì)算公式為式(1)。

圖1 隧道內(nèi)全站儀視角圖

常規(guī)視角是(0.5×0.5)gon(1gon=0.9°),假設(shè)H=5m、D=200m,通過(guò)使用式(1),可求得I=91.6m。依據(jù)這個(gè)數(shù)據(jù),可以在91.6m范圍內(nèi)布置一個(gè)棱鏡,但是無(wú)法滿足監(jiān)測(cè)點(diǎn)密度需求。添加“小視場(chǎng)”功能以后,可以將望遠(yuǎn)鏡的正常視角調(diào)節(jié)為(0.15×0.15)gon,經(jīng)過(guò)計(jì)算同樣可以得到視場(chǎng)范圍,即I=20.8m。
針對(duì)不同的視角進(jìn)行計(jì)算,可以得到多個(gè)視場(chǎng)范圍,如表1所示。
由表1可知,情況相同時(shí),使用小視場(chǎng)有助于減小隧道壁上的視場(chǎng)范圍,能夠在變形區(qū)域內(nèi)適當(dāng)對(duì)監(jiān)測(cè)點(diǎn)進(jìn)行加密處理,從而滿足相關(guān)監(jiān)測(cè)需求。

表1 視場(chǎng)范圍長(zhǎng)度表
1.2 系統(tǒng)軟件
該系統(tǒng)構(gòu)建選用的軟件為L(zhǎng)eica Geo Office,用于采集和處理全站儀數(shù)據(jù),是整個(gè)監(jiān)測(cè)系統(tǒng)的核心部分。
全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)運(yùn)行的第一步為數(shù)據(jù)自動(dòng)采集,以下為數(shù)據(jù)采集的主要流程。
第一步:建立項(xiàng)目,依據(jù)實(shí)際情況,設(shè)置參數(shù)。
第二步:利用后方交會(huì)法設(shè)站,使用至少4個(gè)點(diǎn)進(jìn)行后視定向,從而獲取水平角、豎直角、斜距,進(jìn)而計(jì)算出儀器所處點(diǎn)的三維位置。
第三步:按照順序,將監(jiān)測(cè)點(diǎn)編號(hào)輸入系統(tǒng)中,觀測(cè)保存監(jiān)測(cè)點(diǎn)具體三維坐標(biāo)。
第四步:自動(dòng)觀測(cè),同時(shí)將采集到的數(shù)據(jù)傳輸至監(jiān)測(cè)軟件,并對(duì)數(shù)據(jù)進(jìn)行轉(zhuǎn)換處理。
1.3 系統(tǒng)構(gòu)建流程
文章創(chuàng)建的自動(dòng)監(jiān)測(cè)系統(tǒng)主要由6部分構(gòu)成,分別是基準(zhǔn)點(diǎn)、監(jiān)測(cè)點(diǎn)、通信設(shè)備、全站儀監(jiān)測(cè)站、電源設(shè)備、計(jì)算機(jī)控制系統(tǒng)。自動(dòng)監(jiān)測(cè)系統(tǒng)關(guān)系流程如圖2所示。

圖2 自動(dòng)監(jiān)測(cè)系統(tǒng)關(guān)系流程
具體流程如下:首先,由電源供給系統(tǒng)為自動(dòng)全站儀觀測(cè)站、通信系統(tǒng)、計(jì)算機(jī)監(jiān)控與數(shù)據(jù)處理系統(tǒng)提供電源;其次,將自動(dòng)全站儀觀測(cè)站采集到的數(shù)據(jù)通過(guò)通信系統(tǒng)發(fā)送至計(jì)算機(jī),接收到數(shù)據(jù)信息以后,對(duì)其進(jìn)行處理;再次,將經(jīng)過(guò)處理的數(shù)據(jù)與限值進(jìn)行對(duì)比分析,如果超出了限值,則導(dǎo)出結(jié)果并發(fā)出預(yù)警,反之,只導(dǎo)出結(jié)果;最后,生成報(bào)告。
2 測(cè)量原理
文章以后方交會(huì)設(shè)站為例進(jìn)行分析,該方法是通過(guò)觀測(cè)未知設(shè)站點(diǎn)到至少2個(gè)已知控制點(diǎn),確定設(shè)站點(diǎn)的坐標(biāo)。依據(jù)三角形交會(huì)點(diǎn)的位置,可以將已知點(diǎn)劃分為三種情況:第一種情況如圖3所示,交會(huì)點(diǎn)在三角形內(nèi);第二種情況如圖4所示,該點(diǎn)位于三角形外側(cè);第三種情況如圖5所示,該點(diǎn)在三角形一對(duì)頂角內(nèi)部。假設(shè)E、F、G三點(diǎn)坐標(biāo)分別是(XE,YE)、(XF,YF)、(XG,YG),待測(cè)點(diǎn)W的坐標(biāo)是(XW,YW)。

圖3 交會(huì)點(diǎn)在三角形內(nèi)部

圖4 交會(huì)點(diǎn)位于三角形一邊的外側(cè)
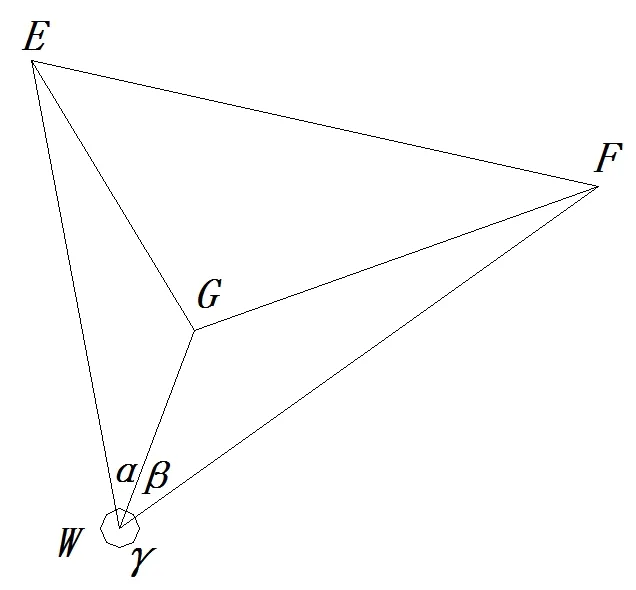
圖5 交會(huì)點(diǎn)在三角形一對(duì)頂角內(nèi)部
利用式(2)進(jìn)行計(jì)算,得到的后方交會(huì)點(diǎn)坐標(biāo)為(xW,yW)。

公式(2)中的WE、WF、WG計(jì)算分為兩種情況,第一種情況是針對(duì)圖3與圖4的,經(jīng)過(guò)計(jì)算可以獲取權(quán)值,對(duì)應(yīng)的計(jì)算公式如下:

第二種情況是針對(duì)圖5的,經(jīng)過(guò)計(jì)算可以獲取權(quán)值,對(duì)應(yīng)的計(jì)算公式如下:

3 全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)在地鐵監(jiān)測(cè)中的應(yīng)用
3.1 項(xiàng)目簡(jiǎn)介
沈陽(yáng)地鐵九號(hào)皇姑屯站1號(hào)風(fēng)亭、D出入口施工,可能會(huì)影響已運(yùn)營(yíng)的地鐵9號(hào)線淮河街沈醫(yī)二院—皇姑屯站區(qū)間,因此需要對(duì)已運(yùn)營(yíng)地鐵線路沈陽(yáng)地鐵9號(hào)線淮河街沈醫(yī)二院—皇姑屯站區(qū)間進(jìn)行變形監(jiān)測(cè)。
3.2 監(jiān)測(cè)點(diǎn)的布設(shè)
在地鐵九號(hào)線淮河街沈醫(yī)二院—皇姑屯站區(qū)間采用自動(dòng)化監(jiān)測(cè),監(jiān)測(cè)范圍內(nèi)的共布設(shè)10個(gè)監(jiān)測(cè)斷面,每個(gè)斷面安裝3個(gè)監(jiān)測(cè)棱鏡。布設(shè)變形點(diǎn)的位置時(shí)利用儀器的小視場(chǎng)功能,使之均勻分布在儀器望遠(yuǎn)鏡的視場(chǎng)內(nèi),相互不受干擾。監(jiān)測(cè)點(diǎn)位布設(shè)平面圖如圖6所示。

圖6 監(jiān)測(cè)點(diǎn)位布設(shè)平面圖
2020年3月,該項(xiàng)目開(kāi)始監(jiān)測(cè),截至2020年5月已經(jīng)獲取數(shù)據(jù)80多期,因受到監(jiān)測(cè)環(huán)境的限制,在保證全站儀架設(shè)不對(duì)線路通行造成影響、通視良好、架設(shè)點(diǎn)穩(wěn)定的前提下,將全站儀的架設(shè)點(diǎn)設(shè)定在如圖7所示的位置上。

圖7 全站儀架設(shè)位置
3.3 監(jiān)測(cè)數(shù)據(jù)處理與分析
以截至2020年5月27日的監(jiān)測(cè)數(shù)據(jù)為例,對(duì)淮河街沈醫(yī)二院—皇姑屯站區(qū)間的水平位移和豎向位移進(jìn)行分析。
淮河街沈醫(yī)二院—皇姑屯站區(qū)間根據(jù)地質(zhì)情況共布設(shè)變形監(jiān)測(cè)斷面10個(gè),基于極坐標(biāo)測(cè)量原理,利用多重實(shí)時(shí)差分改正模型和坐標(biāo)轉(zhuǎn)換對(duì)測(cè)得的監(jiān)測(cè)點(diǎn)坐標(biāo)進(jìn)行計(jì)算,運(yùn)行經(jīng)Excel VBA編寫的程序,獲取區(qū)間內(nèi)所有監(jiān)測(cè)點(diǎn)的水平變化量和豎向變化量。
由監(jiān)測(cè)數(shù)據(jù)反饋結(jié)果可知,該階段所有監(jiān)測(cè)點(diǎn)水平變化量為-0.15~0.16mm、豎向變化量為-0.20~0.20mm,所有監(jiān)測(cè)點(diǎn)的變化量均小于1mm,該階段所有監(jiān)測(cè)點(diǎn)水平變化量、豎向變化量很小,監(jiān)測(cè)數(shù)據(jù)顯示無(wú)異常變化點(diǎn)位。
4 總結(jié)
文章將構(gòu)建的全站儀自動(dòng)監(jiān)測(cè)系統(tǒng)應(yīng)用到沈陽(yáng)地鐵淮河街沈醫(yī)二院—皇姑屯站區(qū)間監(jiān)測(cè)中,結(jié)果表明處理后的數(shù)據(jù)精度滿足規(guī)范要求,監(jiān)測(cè)結(jié)果準(zhǔn)確、可靠,取得了很好的效果,具有較高的應(yīng)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:37:18
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電測(cè)與儀表(2016年9期)2016-04-12 00:29:52
河南科技(2014年5期)2014-02-27 14:08:32