復(fù)雜光照下的船舶水尺圖像二值化新方法
2021-03-12 08:26:26喬志凱陳世才蒙子昕史國友
中國航海 2021年4期
喬志凱, 陳世才, 蒙子昕, 史國友
(大連海事大學(xué) 航海學(xué)院, 遼寧 大連 116026)
船舶水尺位于艏、舯以及艉的左右兩舷,共六處水尺標(biāo)志。通過測量六面水尺可得到船舶吃水深度進而保障船舶的安全航行。船舶水尺有英制和公制兩種,英制字符為羅馬數(shù)字,單位in,字高和相鄰兩字符間隔為1 in;公制字符為阿拉伯?dāng)?shù)字,單位cm,字高和相鄰兩字符間隔為10 cm。除此之外,有些國家和地區(qū)的字符大小和間隔會有略微的改動。
目前,國際間的大宗貨物的商品交易結(jié)算、進出口通關(guān)和海事索賠都需準(zhǔn)確的水尺測量。傳統(tǒng)的水尺測量工作大多依賴人工,水尺人工讀數(shù)一般在靠港后才能進行,一方面起伏不平的大風(fēng)浪會在船體留下彎曲的假水線;另一方面陽光透過水面會產(chǎn)生漫射和折射現(xiàn)象,在船體水尺區(qū)域形成大量的光照和陰影,這些都會影響人工讀數(shù)的準(zhǔn)確性。[1]隨著科學(xué)技術(shù)的飛速發(fā)展,尤其是在人工智能領(lǐng)域,為提高水尺讀數(shù)的準(zhǔn)確性和科學(xué)性,越來越多的海事部門和船舶企業(yè)開始使用船舶水尺自動識別系統(tǒng)來測量船舶水尺。船舶水尺自動識別系統(tǒng)通常由水尺定位、水尺字符分割和水尺字符識別等3部分組成。[2]由于水尺字符分割和水尺字符識別都是基于水尺二值化進行的,所以船舶水尺二值化效果的好壞將直接影響整個系統(tǒng)的性能。目前,對于虛假水線造成的光照不均勻與光照折射和漫射形成的陰影問題,已有的船舶水尺自動識別系統(tǒng)大多采用比較傳統(tǒng)的二值化處理方法,對此沒有針對性的解決,處理效果也很不理想。[3]傳統(tǒng)的二值化處理方法主要有以下兩種:

圖1 船舶水尺標(biāo)志
1) 全局閾值法,這類方法是對圖像整體灰度進行數(shù)理分析,然后根據(jù)平均灰度值、灰度最大類間方差和灰度方差或灰度均差確定全局閾值,最后對比每個像素點進行二值化賦值。[4]例如OTSU算法、迭代法和平均灰度法。
2) 局部閾值法,這類方法利用選擇窗口遍歷每一個像素點,通過分析窗口中心像素點周圍鄰域內(nèi)的灰度變化,得到該像素點的局部閾值,小于閾值的像素點賦值為0,大于閾值的像素點賦值為255。例如Bernsen算法、Niblack算法等。
郭秀艷[5]提出在水尺圖像上部3/4的部位,把水尺灰度圖像分行處理,然后尋找每一行的最大灰度值進行求和平均,最后依據(jù)這個平均灰度值二值化處理,這種最大灰度平均處理后的全局閾值雖然降低噪聲,但依然解決不了光照不均勻的問題;吳禹辰[6]對彩色水尺圖像進行RGB(Red Green Blue)三通道的灰度圖像處理分析,總結(jié)船體背景和水尺字符組合分割規(guī)律,然后進行二值化處理,這種方法對圖像灰度直方圖呈現(xiàn)明顯雙峰狀態(tài)的圖像表現(xiàn)效果好,但對于實際水況中細(xì)節(jié)復(fù)雜和光照不均勻的圖像處理效果不佳;趙建蕾等[7]提出先采用高低帽增強字符對比度,再進行迭代分塊處理圖像,該算法對字符處理質(zhì)量要求較高,并且不易選擇合適的高低帽窗口;歐陽慶[8]提出先把原圖進行同態(tài)濾波增強處理,再用Bernsen算法求出局部閾值二值化,該方法涉及同態(tài)濾波處理,但同態(tài)濾波器的截止頻率不易確定,且經(jīng)過同態(tài)濾波后還是不能解決陰影對目標(biāo)造成的干擾。
傳統(tǒng)方法都不能很好地保留字符目標(biāo)和消除復(fù)雜光照下的船體背景噪聲。傳統(tǒng)OTSU算法經(jīng)常導(dǎo)致像素點強制二值化,造成細(xì)節(jié)目標(biāo)丟失;Niblack算法對局部窗口中每個像素計算局部均值和方差,然后去確定局部閾值,會產(chǎn)生偽影現(xiàn)象且對光照不均問題處理效果和速度不如Bernsen算法;Bernsen算法處理復(fù)雜細(xì)節(jié)和光照不均勻問題效果較好,但會有大量的背景細(xì)節(jié),導(dǎo)致圖像二值化后產(chǎn)生目標(biāo)斷裂或偽影。1個閾值分割圖像過于籠統(tǒng),考慮使用2個閾值,所以采用OTSU和Bernsen兩種算法相結(jié)合。
本文針對全局閾值法容易出現(xiàn)強制二值化的問題,提出分塊OTSU思想避免灰度變化劇烈區(qū)域強制二值化,大大減少了處理時間;針對局部閾值法細(xì)節(jié)保留過于豐富,存在大量光照噪聲點,提出一種高斯平滑濾波后Bernsen法的方法。通過調(diào)節(jié)相關(guān)參數(shù)能有效地減少光照陰影和船體鐵銹等造成的噪聲,同時能克服光照不均勻造成的目標(biāo)偽影和字符斷裂。
1 幾種常見二值化算法分析
常見的二值化算法只對特定情況下的圖像二值化效果較好。在處理不同類型或不同需求的圖像時,需結(jié)合多種二值化算法處理,下面介紹幾種比較常見的二值化算法。
1.1 OTSU算法
OTSU算法是一種自適應(yīng)閾值二值化方法,又稱大津法。[9]其核心思想是通過整體分析圖像的灰度特性,計算整體像素點灰度的最大類間方差,即目標(biāo)和背景分割概率的最大值,此時這個值就是OTSU閾值,最后把小于OTSU閾值的像素點賦值為0;大于OTSU閾值的像素點賦值為255。一般情況下,OTSU最優(yōu)閾值為圖像灰度直方圖的雙峰之間的最低點。
1) 對于一幅圖像,設(shè)前景像素點占圖像總像素點比例為w0,均值為u0;設(shè)背景像素點占圖像總像素點比例為w1,均值為u1;則該圖的灰度均值為
u=w0×u0+w1×u1
(1)
2) 建立灰度圖像的最大類間方差目標(biāo)函數(shù)為
g(t)=w0×(u0-u)2+w1×(u1-u)2
(2)
式(2)中:當(dāng)g(t)最大時,圖像背景和目標(biāo)分離概率最大,分離效果最好,此時的t即為OTSU最佳閾值。
1.2 Bernsen算法
Bernsen算法是一種典型的局部閾值二值化算法,其在細(xì)節(jié)優(yōu)化處理方面性能較強,能很好的保留有效目標(biāo)。[10]其核心思想是用一個選擇窗口遍歷全圖每個像素點,使其根據(jù)鄰域的灰度變化決定當(dāng)前像素點的閾值。
1) 設(shè)窗口的大小為(2w+1)×(2w+1);窗口的中心像素點為f(x,y);窗口在x方向的增量為l;窗口在y方向的增量為k;圖像的Bernsen算法最優(yōu)解為
(3)
2) 對f(x,y)的像素點進行比較,若當(dāng)前灰度值大于T,則賦值為1;若當(dāng)前灰度值小于T,則被賦值為0。最終得到的二值化圖像為
(4)
1.3 Niblack算法
Niblack算法是一種結(jié)合局部標(biāo)準(zhǔn)差和局部均差提出來的局部閾值二值化算法。[11]對于某一像素點(i,j),設(shè)該點為局部窗口中心,局部窗口為b×b,則對此像素點的閾值T,Niblack算法的表達(dá)式為
T=m(i,j)+k×s(i,j)
(5)
式(5)中:T為該點的閾值;m(i,j)為以f(i,j)為中心點的窗口所有像素點的局部均差;s(i,j)為以f(i,j)為中心點的窗口所有像素點的局部標(biāo)準(zhǔn)差;k為關(guān)系調(diào)節(jié)系數(shù)(默認(rèn)值為-0.2),k的取值對于Niblack的二值化效果起決定性作用。
1.4 各算法對比分析
常見的二值化算法對比見表1。

表1 常見的二值化算法對比
2 基于雙閾值的船舶水尺二值化新方法
在船舶水尺圖像上,不同位置的光照分布會隨著船舶表面的狀況和照明環(huán)境的不同而發(fā)生變化。在這種情況下,傳統(tǒng)的二值化方法并不總能產(chǎn)生很好的結(jié)果。
2.1 二值化新方法的核心思想
為解決光照不均勻的問題,特別是光照陰影,提出一種基于雙閾值的船舶水尺二值化新方法,其主要包括用圖像分塊優(yōu)化OTSU算法、選擇高斯濾波優(yōu)化Bernsen算法和運用雙閾值二值化。
1) 將原始水尺圖像分成m×n個塊,然后計算每一個子塊的OTSU閾值,最后通過滑動窗口對每個中心子塊進行OTSU閾值算數(shù)平均值計算。每個子塊都有各自的OTSU閾值,這樣可最大程度地聯(lián)系整體和部分,避免因強制二值化帶來的水尺圖像大面積目標(biāo)丟失。
圖像被分為若干子塊,粗線虛線框為滑動窗口,見圖2。由圖2可知:當(dāng)滑動窗口大于3×3時,二值化結(jié)果效果提升不明顯,運算成本也會大幅增加,因此,新算法滑動窗口選擇為3×3。滑動窗口的中心為中心子塊,中心子塊的周圍有8個相鄰子塊,中心子塊的OTSU閾值是中心子塊和周邊8個相鄰子塊OTSU閾值的算術(shù)平均值。
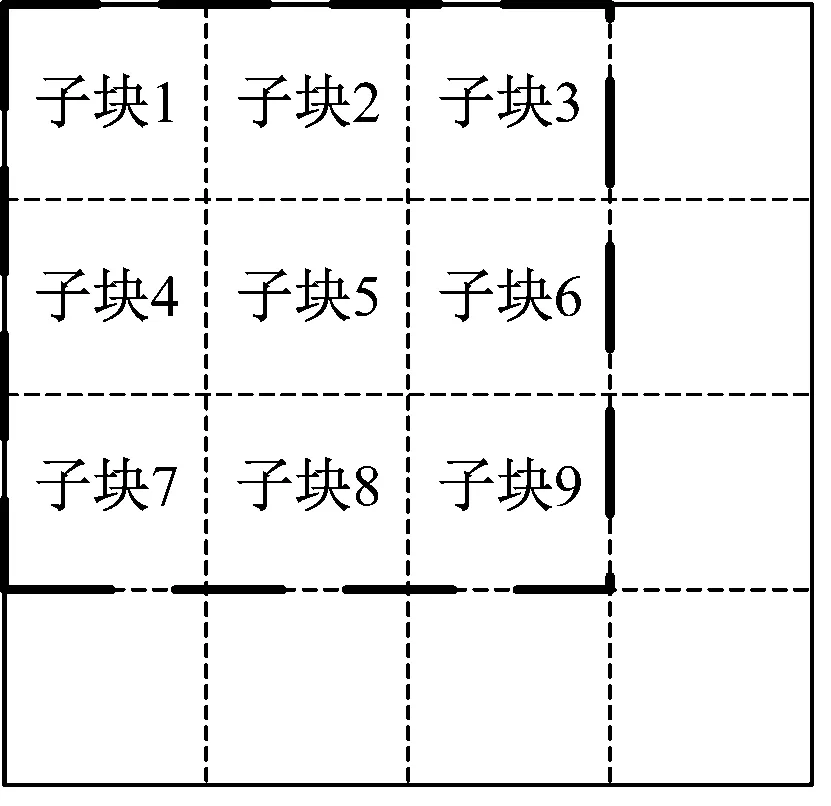
圖2 圖像分塊示意
2) 改進的Bernsen算法:對各個子塊分別進行傳統(tǒng)Bernsen二值化處理和經(jīng)高斯平滑濾波后Bernsen二值化處理,最后通過線性比例結(jié)合這兩個局部閾值得到一個新的局部閾值。這樣的處理可很好地去除不均勻的光照陰影。
3) 結(jié)合全局閾值和局部閾值對各像素點逐個二值化。
2.2 二值化新方法的算法過程
將水尺圖像進行灰度化處理,把其分成m×n個塊。假設(shè)每個塊的中心點是f(x,y),大小為(2w+1)×(2w+1),k和l為窗口的參數(shù)。二值化新方法的算法流程見圖3。

圖3 二值化新方法的算法流程
1) 計算當(dāng)前中心子塊的OTSU閾值T1(x,y)為中心子塊和周邊8個相鄰子塊OTSU閾值的算術(shù)平均值。由于OTSU算法經(jīng)常導(dǎo)致像素點強制二值化,造成細(xì)節(jié)目標(biāo)丟失。A可取10%~20%,由于水尺圖像存在大量噪聲,新方法取20%。故T1(x,y)應(yīng)滿足:
(6)
式(6)中:hist[i]為原圖灰度直方圖;A為圖像像素點的總數(shù)。
2) 根據(jù)Bernsen算法計算f(x,y)的閾值T2(x,y)為
(7)
式(7)中:k和l為窗口的參數(shù)。
3) 建立一個高斯濾波器。
s=(2w+1)×(2w+1)
(8)
(9)
式(9)中:σ為高斯分布的標(biāo)準(zhǔn)差[13],σ越小,圖像的平滑效果越不明顯;反之,σ越大,對圖像的平滑效果越明顯。

(10)
(11)
α∈(0,1);β∈(0,1)
式(11)中:α為調(diào)整帶高斯濾波器的Bernsen算法與傳統(tǒng)Bernsen算法之間平衡的參數(shù),α∈(0,1),當(dāng)α為0時,該算法為Bernsen算法,當(dāng)α為1時,該算法為帶高斯濾波器的Bernsen算法;β為靈敏度調(diào)節(jié)參數(shù),當(dāng)圖像灰度值和閾值的差異過大時,經(jīng)常會出現(xiàn)錯誤結(jié)果。為解決這個問題,可將閾值乘以常數(shù)β來降低Bernsen算法的靈敏度,根據(jù)試驗經(jīng)驗,一般β值取為0.9,可獲得最佳結(jié)果。
6) 利用全局閾值和局部閾值逐點二值化,得到各點的像素b(x,y),有
(12)
式(12)中:γ∈(0.20,0.40),一般取γ=0.25。
如果(1-γ)×T1≤f(x,y)≤(1+γ)×T1
(13)
7) 應(yīng)用中值濾波[14]去除噪聲。
3 試驗結(jié)果及分析
3.1 試驗結(jié)果
測試圖片是由大連港口監(jiān)視設(shè)備所拍攝的船舶視頻流中截取的水尺圖像。部分試驗結(jié)果見圖4~圖8。約在早上十點正常光照下截取的船舶水尺圖像如圖4所示;處于正常光照但有樹葉陰影的水尺圖像如圖5所示;拍攝于中午暴曬環(huán)境下的高亮度水尺圖像如圖6所示;拍攝于傍晚的光照較暗的水尺圖像如圖7所示;不同光照下的新方法部分試驗過程如圖8所示。

圖4 正常光照下的二值化算法對比
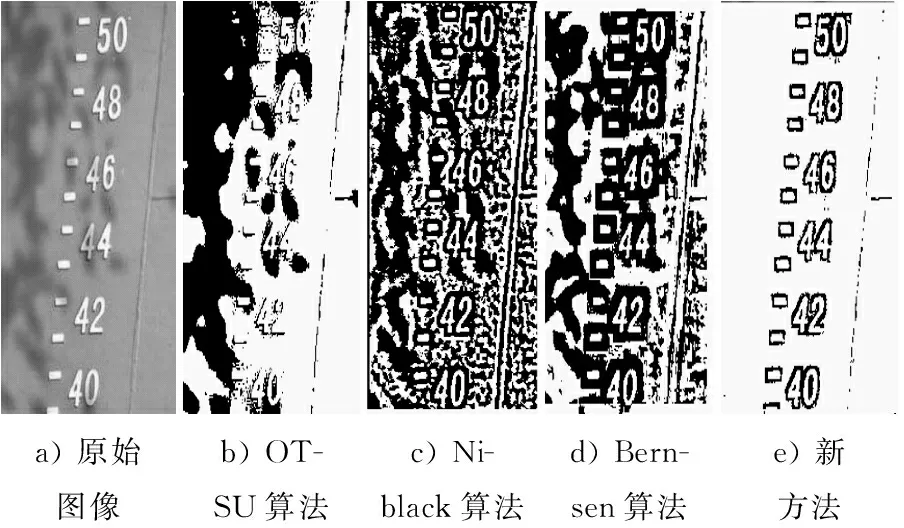
圖5 不均勻光照下的二值化算法對比
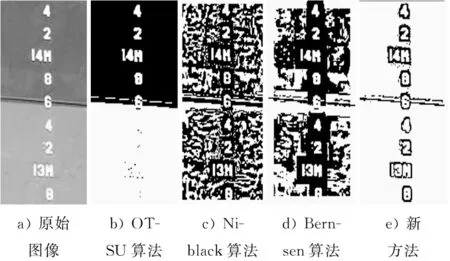
圖6 光照充足下的二值化算法對比
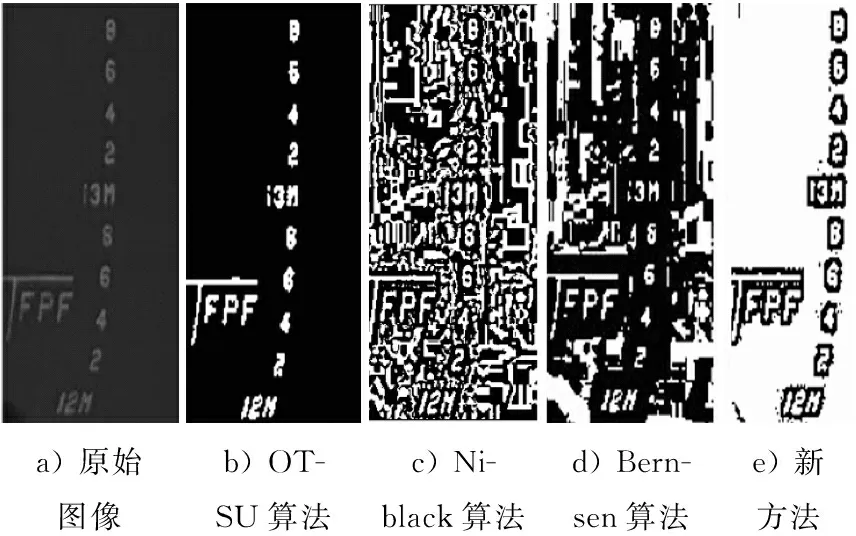
圖7 光照不足下的二值化算法對比

圖8 不同光照下的新方法部分試驗過程圖
取Niblack算法的關(guān)系調(diào)節(jié)系數(shù)k=-0.2
設(shè)新方法算法的參數(shù)組為
para=[α,β,γ,w]
(14)
圖4的參數(shù)組為
para=[0.7,0.9,0.25,3]
(15)
圖5的參數(shù)組為
para=[0.6,0.9,0.30,3]
(16)
圖6的參數(shù)組為
para=[0.6,0.9,0.25,2]
(17)
圖7的參數(shù)組為
para=[0.5,0.9,0.25,2]
(18)
3.2 試驗分析
3.2.1對比樣例分析
為證明新方法算法的有效性,挑選4種不同光照環(huán)境下的船舶水尺圖像(即光照正常、光照不均勻、光照充足和光照不足),然后分別對這4種船舶水尺圖像進行OTSU算法、Niblack算法、Bernsen算法和新方法算法二值化處理。其中:OTSU算法屬于全局閾值算法;Niblack算法和Bernsen算法屬于局部閾值算法;新方法算法屬于全局+局部的雙閾值算法。
由圖4b~圖7b可知:對于在不同光照下的船舶水尺圖像,OTSU算法整體處理效果較差。水尺字符和船板背景能很好的分離如圖7b所示;兩種大塊的船體背景或大量的陰影會對OTSU閾值的選取造成干擾,從而錯誤分離目標(biāo)和背景。通常對于細(xì)節(jié)較多的圖像,全局閾值法二值化效果較差,因此考慮用局部閾值法進行試驗。局部閾值法會根據(jù)每個像素點鄰域灰度變化分別進行處理,從而把這種局部細(xì)節(jié)變化精確地表現(xiàn)出來。[15]
由圖4c~圖7c可知:Niblack算法對區(qū)域性的目標(biāo)細(xì)節(jié)保留較好,但對光照陰影的消除效果較差,字符區(qū)域能夠比較準(zhǔn)確的分割出來,但無法克服光照陰影造成的影響如圖4c和圖5c所示;光照過足和不足時Niblack算法二值化效果也較差,具體表現(xiàn)為字符區(qū)域不夠清晰,周圍孤立噪聲點多如圖6c和圖7c所示;光照反射過亮和虛假水線區(qū)域存在大面積的虛假目標(biāo)。總體來說,Niblack算法比OTSU算法能更好地識別水尺字符,保留更多的字符信息,但在消除光照陰影方面效果一般。
由圖4d~圖7d可知:Bernsen算法能完整地分割字符,但帶來了周圍背景細(xì)節(jié)的影響,造成大量的虛假目標(biāo)和字符尾影,Bernsen算法會把船體凹凸面強化為虛假目標(biāo)如圖4d和圖6d所示;光線較暗以及暗紅色的船體顏色造成對比度下降,從而形成大量的船體環(huán)狀虛假目標(biāo)和偽影如圖7d所示;正確分離出了水尺字符和刻度,顯著地消除了樹葉陰影,但存在大量小顆粒狀的噪聲點,水尺字符邊緣和周圍的噪聲形成尾影如圖5d所示。
由圖4e~圖7e可知:新方法算法對于復(fù)雜光照條件下的水尺圖像二值化效果好,通過調(diào)節(jié)參數(shù)可解決光影、光照過量以及光照不足等問題。克服船體凹凸面引起的局部光照不均,水尺字符清晰且細(xì)節(jié)保留完好如圖4e所示;消除樹葉陰影如圖5e所示,被遮蓋字符44、46和50也能精確地分割出來如圖5d所示;分割字符周圍沒有成片偽影出現(xiàn),船體周圍大量的噪聲點也大量消除,水尺字符清晰明亮如圖6e和圖7e所示。
由圖4~圖8可知:分塊OTSU算法比OTSU算法保留更多字符,能消除樹影,適應(yīng)不同光照條件;然后對原圖灰度圖像進行高斯濾波處理,能消除大量的噪聲,為后續(xù)的Bernsen局部細(xì)節(jié)處理做好準(zhǔn)備;最后結(jié)合兩者得到最終的二值化圖像。
為驗證上述結(jié)論準(zhǔn)確性,選取50張不同的水尺圖像進行二值化算法對比,得出其識別率(即90%以上目標(biāo)像素點成功識別)和算法運行時間,見表2。由表2可知:對在復(fù)雜光照條件下,OTSU算法識別率低,耗時少;Niblack算法和Bernsen算法識別率較高,耗時高,時效性差;新方法算法識別率高,耗時較少,時效性好。

表2 4種二值化算法的識別率和耗時
3.2.2新方法參數(shù)分析
新方法的參數(shù)有α、β和γ以及局部閾值窗口w,在不同光照條件下,調(diào)節(jié)參數(shù)會得到合適的二值化圖像。在該算法中,α和w對處理結(jié)果有顯著影響。不同k和l下的試驗結(jié)果見圖9。不同α參數(shù)下的處理結(jié)果見圖10。

1)w:局部窗口大小。傳統(tǒng)的Bernsen算法采用局部窗口的最小最大值作為檢測閾值,k和l是w中的參數(shù)。一般圖像分辨率越大,w值越大,但用w分塊的數(shù)量一般大于25塊。k:假設(shè)k為w的y軸方向變量,l為w的x軸方向變量。為顯示原始陰影圖像如圖9b所示,顯示5種不同k和l取值下的試驗結(jié)果。當(dāng)k和l的值較大時,Bernsen算法的計算非常耗時,并且陰影去除的有效性并不明顯,如圖9所示。k=0或l=0時,只是掃描方向不同,不會影響試驗結(jié)果。新方法采用水平掃描,即k=0來實現(xiàn)二值化處理,字符陰影消除明顯如圖9d所示;l:當(dāng)k=0時,窗口只由l決定。由圖9d和9f可知:發(fā)現(xiàn)l的大小影響水尺字符的處理結(jié)果。如果l很小,字符可能會被移除,但可能會產(chǎn)生噪聲。l的值通常是由字符寬度內(nèi)的一個值來定義的,這樣可獲得良好的結(jié)果。例如,在圖9中,字符“4”的最大寬度為14像素,最小寬度為4像素;因此,選擇水尺字符平均寬度(9像素)作為l的值。
2)β:Bernsen算法對圖像灰度值和閾值的差異比較敏感。當(dāng)Bernsen算法的靈敏度為大時,經(jīng)常會出現(xiàn)錯誤結(jié)果。為解決這個問題,可將閾值乘以常數(shù)β來降低Bernsen算法的靈敏度。根據(jù)試驗經(jīng)驗,一般β值為0.9,可獲得最佳結(jié)果。
3)α:調(diào)整傳統(tǒng)Bernsen算法與帶高斯濾波器的Bernsen算法之間平衡的參數(shù)。調(diào)整不同的α可不同程度地去除陰影,并成功地識別出水尺字符。高斯濾波器不會模糊字符的邊緣,只是處理原始圖像以獲得新的邊緣像素點。因此,高斯濾波器改善了Bernsen算法的消除光照陰影性能。傳統(tǒng)Bernsen算法和高斯濾波Bernsen后的算法的結(jié)果,可看到經(jīng)過高斯濾波去除了大量的陰影噪聲點,水尺字符和船體板框取得很好的二值化效果,但是α過大,會造成部分字符目標(biāo)的邊緣丟失分別如圖10b和圖10c所示。經(jīng)過大量試驗,為獲得最佳結(jié)果高斯濾波器的尺度σ設(shè)置為10,而α設(shè)置為0.5,如圖10d所示。
4) 參數(shù)γ:γ取值為(0.20,0.40)。參數(shù)γ為表征窗口灰度值波動大小的參數(shù)值。γ控制所挑選出的區(qū)域整體亮度偏小和偏大的程度,γ越大,可控制的區(qū)域的整體灰度變化范圍就越大,越有利于挑選出整體灰度波動大的區(qū)域,二值化后的圖像細(xì)節(jié)信息相對減少,噪聲點也減少,反之則增加。
4 結(jié)束語
復(fù)雜的光照變化經(jīng)常影響船舶水尺圖像二值化效果,降低船舶水尺識別系統(tǒng)的整體性能。為解決此情況下,船舶水尺圖像二值化存在全局閾值法強制二值化和局部閾值法光照陰影無法去除的問題,提出一種基于雙閾值的二值化新方法。新方法先對每個圖像子塊使用OTSU算法避免強制二值化造成的目標(biāo)丟失,然后利用高斯濾波預(yù)處理后的Bernsen算法消除因光照不均產(chǎn)生的光照陰影,最后動態(tài)調(diào)節(jié)雙閾值參數(shù)能適應(yīng)不同類型的船舶水尺圖像。試驗結(jié)果表明:該方法能有效地消除光照陰影、屏蔽絕大部分背景噪聲且保留更多的水尺字符細(xì)節(jié)。