橋梁拉索PVF帶纏包的控制系統(tǒng)設(shè)計(jì)及實(shí)現(xiàn)
2021-03-17 23:29:08韋炳機(jī)
西部交通科技 2021年12期
關(guān)鍵詞:單片機(jī)
韋炳機(jī)
摘要:PVF帶是一種韌性好、黏性強(qiáng)、抗紫外線能力好的聚氟乙烯材料,是目前橋梁拉索保護(hù)應(yīng)用領(lǐng)域中一種較好的材料。文章針對(duì)橋梁拉索PVF帶的纏包應(yīng)用,介紹了PVF帶纏包控制系統(tǒng)的硬件構(gòu)成、電路設(shè)計(jì)以及軟件實(shí)現(xiàn)方法,并分析了該系統(tǒng)的纏包效果與工作效率。
關(guān)鍵詞:PVF帶;橋梁拉索;單片機(jī);聯(lián)動(dòng)驅(qū)動(dòng)
中國(guó)分類號(hào):U443.38文章標(biāo)識(shí)碼:A291124
0 引言
拉索作為一種高效承受拉力的結(jié)構(gòu)構(gòu)件在斜拉索橋梁的建設(shè)中有著廣泛的應(yīng)用[1]。在過去的十幾年里全世界修建的斜拉橋越來越多,拉索作為橋梁重要的承重構(gòu)件,其健康防護(hù)儼然成為橋梁防護(hù)工作的一項(xiàng)重要內(nèi)容。拉索布置在橋面上方,長(zhǎng)期處于高強(qiáng)度應(yīng)力狀態(tài),曝露在復(fù)雜的自然環(huán)境中,PE護(hù)套防腐層容易過早地老化損壞,導(dǎo)致水、氧及腐蝕因子等的入侵,從而引起拉索內(nèi)部結(jié)構(gòu)的銹蝕,威脅橋梁的安全[2]。拉索PE護(hù)套表面的狀況及內(nèi)部腐蝕狀況是評(píng)估拉索體系健康安全的一項(xiàng)重要參數(shù)[3]。
PVF薄膜膠帶是一種新型拉索PE護(hù)套保護(hù)材料。在斜拉索外層纏包上PVF薄膜帶,可以對(duì)PE護(hù)套起到很好的保護(hù)作用。該方法在國(guó)內(nèi)外都已經(jīng)被采用,但因缺乏相應(yīng)的PVF帶智能纏包設(shè)備,阻礙了此技術(shù)的發(fā)展[4]。目前國(guó)內(nèi)橋梁拉索的PVF帶纏包主要還是采用人工手動(dòng)的方法進(jìn)行,工作效率低下,PVF帶纏包質(zhì)量不穩(wěn)定。所以設(shè)計(jì)開發(fā)一種PVF帶智能纏包的系統(tǒng)對(duì)橋梁健康維護(hù)的建設(shè)具有重要的意義。
本文研究的目的是建立基于四聯(lián)動(dòng)電機(jī)的橋梁拉索PVF帶智能纏包的系統(tǒng)設(shè)計(jì),即利用單片機(jī)主控器偵聽人機(jī)交互界面下達(dá)的指令,根據(jù)指令操作兩個(gè)行走電機(jī)和兩個(gè)旋轉(zhuǎn)電機(jī)動(dòng)作,在電機(jī)轉(zhuǎn)速的反饋條件下,協(xié)調(diào)四個(gè)電機(jī)的聯(lián)合動(dòng)作,最終實(shí)現(xiàn)行走電機(jī)速度與旋轉(zhuǎn)電機(jī)速度的科學(xué)配比,保障PVF帶纏包重疊質(zhì)量的穩(wěn)定。系統(tǒng)設(shè)計(jì)的手持控制器能為系統(tǒng)的應(yīng)用提供更便捷的方法。期望該系統(tǒng)設(shè)計(jì)能為橋梁拉索PVF帶的纏包工作提供智能、便捷、高效、穩(wěn)定的技術(shù)保障。
1 PVF帶纏包機(jī)的系統(tǒng)硬件構(gòu)成及原理
1.1 系統(tǒng)的硬件構(gòu)成
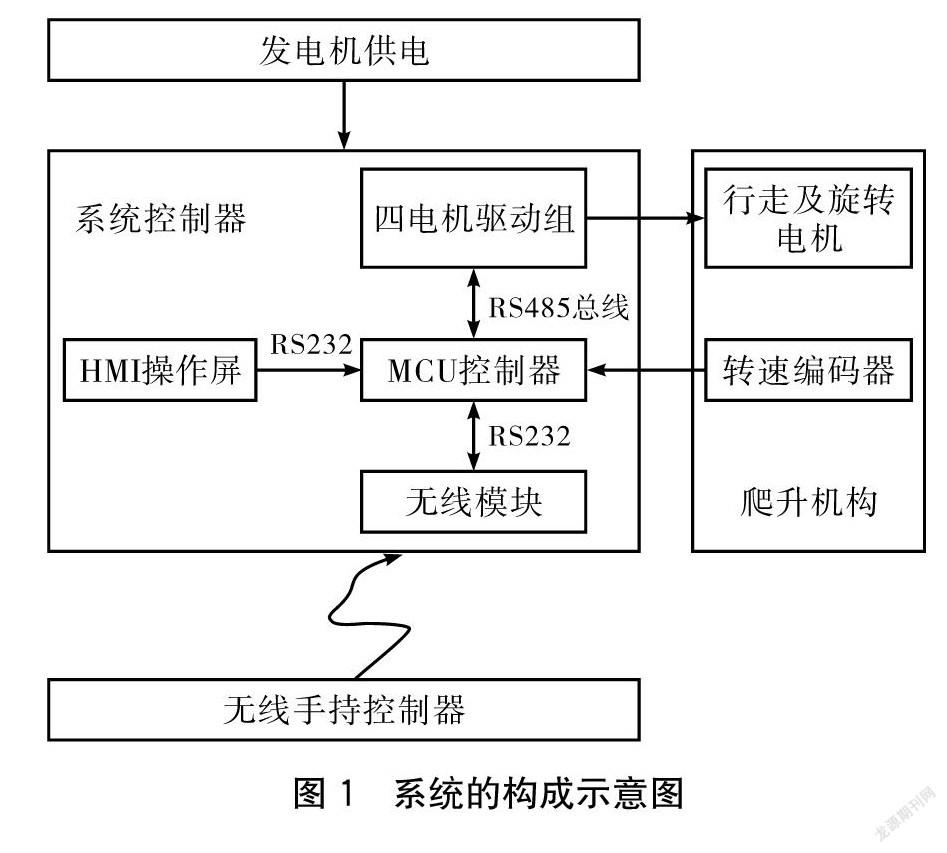
系統(tǒng)主要由發(fā)電機(jī)供電組、系統(tǒng)控制器、無線手持設(shè)備及行走、PVF帶纏包機(jī)等構(gòu)成。MCU控制器通過RS485總線與四路電機(jī)驅(qū)動(dòng)模塊進(jìn)行通信,通過配置四路電機(jī)驅(qū)動(dòng)的參
數(shù)實(shí)現(xiàn)四路電機(jī)的聯(lián)合動(dòng)作操作,再配合4臺(tái)電機(jī)的實(shí)時(shí)轉(zhuǎn)速反饋,實(shí)現(xiàn)用戶設(shè)置的功能智能適應(yīng);通過RS232總線與433 MHz的無線收發(fā)模塊、HMI顯示屏進(jìn)行通信,偵聽及響應(yīng)用戶指令功能。見圖1。
1.2 系統(tǒng)直流電機(jī)驅(qū)動(dòng)主要電路設(shè)計(jì)
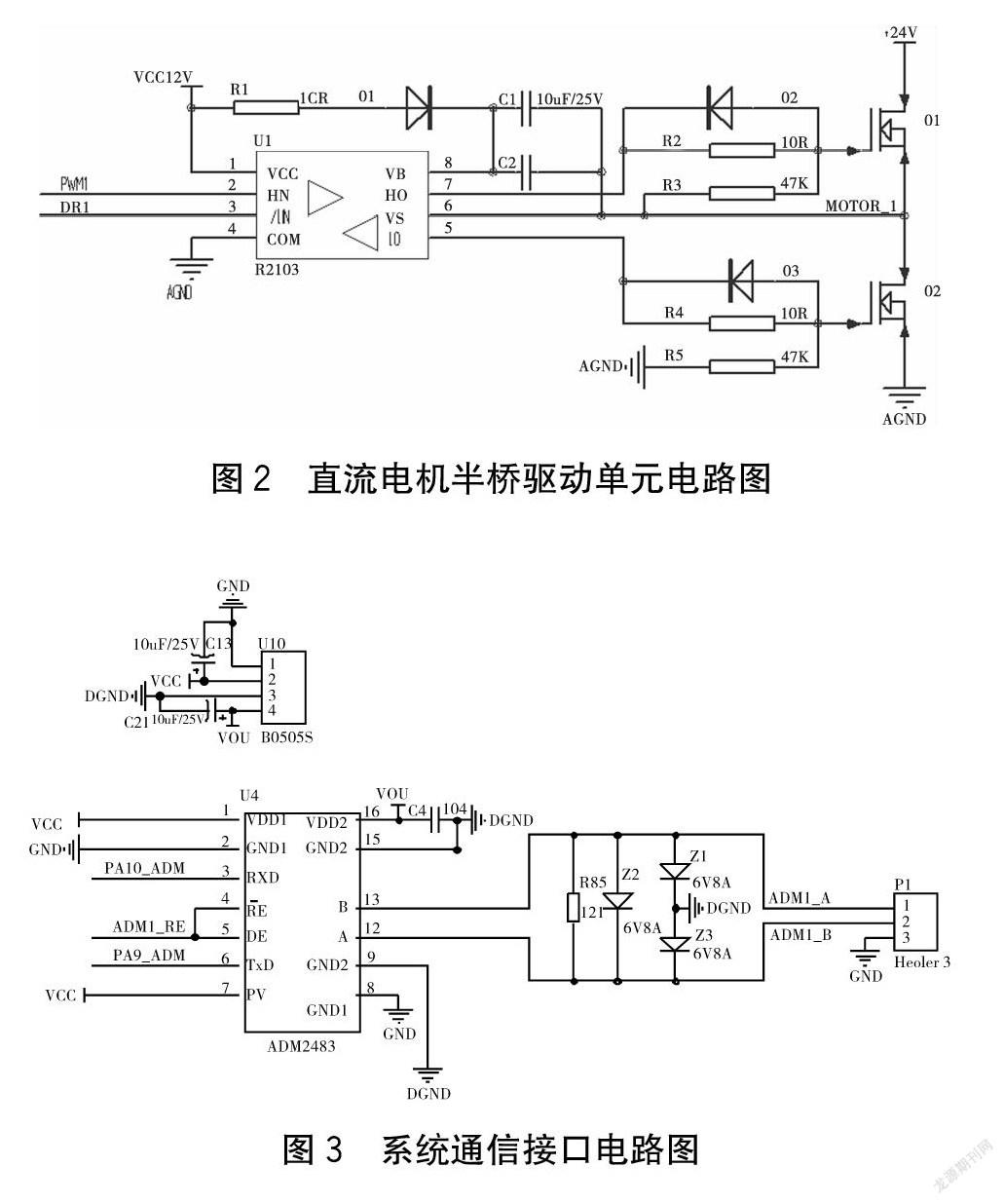
系統(tǒng)直流電機(jī)的驅(qū)動(dòng)總共有4組,驅(qū)動(dòng)電路模塊主要由通信電路及功率驅(qū)動(dòng)電路構(gòu)成,通信電路采用磁隔離的方式來降低因電機(jī)運(yùn)行而引入的電磁干擾,提高通信的可靠性。直流電機(jī)驅(qū)動(dòng)電路主要采用16片場(chǎng)效應(yīng)管PSMN009和8片IR2103S半橋驅(qū)動(dòng)芯片設(shè)計(jì)成的4個(gè)H橋直流電機(jī)驅(qū)動(dòng)電路。設(shè)計(jì)中的PSMN009導(dǎo)通阻抗RDS(ON)<9 m[WTBZ]Ω,可通過的最大電流ID=100 A,DS端最大電壓VDSS=100 V。IR2103S是一款高壓、高速功率MOSFET和IGBT的柵極驅(qū)動(dòng)器,兼容標(biāo)準(zhǔn)的CMOS邏輯輸入和LSTTL輸出,以及兼容多種類型電平的主控器,在很大程度上降低了H橋功率驅(qū)動(dòng)電路系統(tǒng)的設(shè)計(jì)難度。圖2所示的直流電機(jī)半橋驅(qū)動(dòng)單元示意圖中,Q1、Q2為N溝道場(chǎng)效應(yīng)管(PSMN009);高速開關(guān)二極管D2、D3和電阻R2、R3的作用是降低削弱半橋驅(qū)動(dòng)芯片(HO/IO)輸出的過應(yīng)力,達(dá)到保護(hù)功率管的作用;自舉二極管D1和電容C1構(gòu)成自舉電路為電橋高壓側(cè)端驅(qū)動(dòng)提供懸浮驅(qū)動(dòng)電壓,其中自舉二極管選擇高速開關(guān)管IN4148,電容選擇高質(zhì)量的鉭電容且耐壓值為35 V;為使直流電機(jī)正常工作,電路的控制流程是當(dāng)PWM源作用在IR2103的2腳(HIN)上時(shí),3腳必須提前拉低以關(guān)斷低側(cè)端的場(chǎng)效應(yīng)管的導(dǎo)通;同時(shí)另一半橋電路的2腳拉低關(guān)斷高側(cè)端的場(chǎng)效應(yīng)管,3腳拉高打開低側(cè)端的場(chǎng)效應(yīng)管。
1.3 通信接口電路設(shè)計(jì)
系統(tǒng)通信接口采用電源隔離及磁隔離雙重保護(hù)來提高通信的抗干擾能力,如圖3所示圖中U10是通信隔離電源B0505S,該電源模塊具有體積小、性能穩(wěn)定、可靠性高且紋波最大值僅有100 mVp-p[5]的特點(diǎn)。U4是一款帶有磁隔離功能的工業(yè)RS485通信集成芯片ADM2483,它能為電機(jī)應(yīng)用領(lǐng)域中數(shù)據(jù)的可靠通信提供一個(gè)較優(yōu)的解決方案。
1.4 MCU主控器
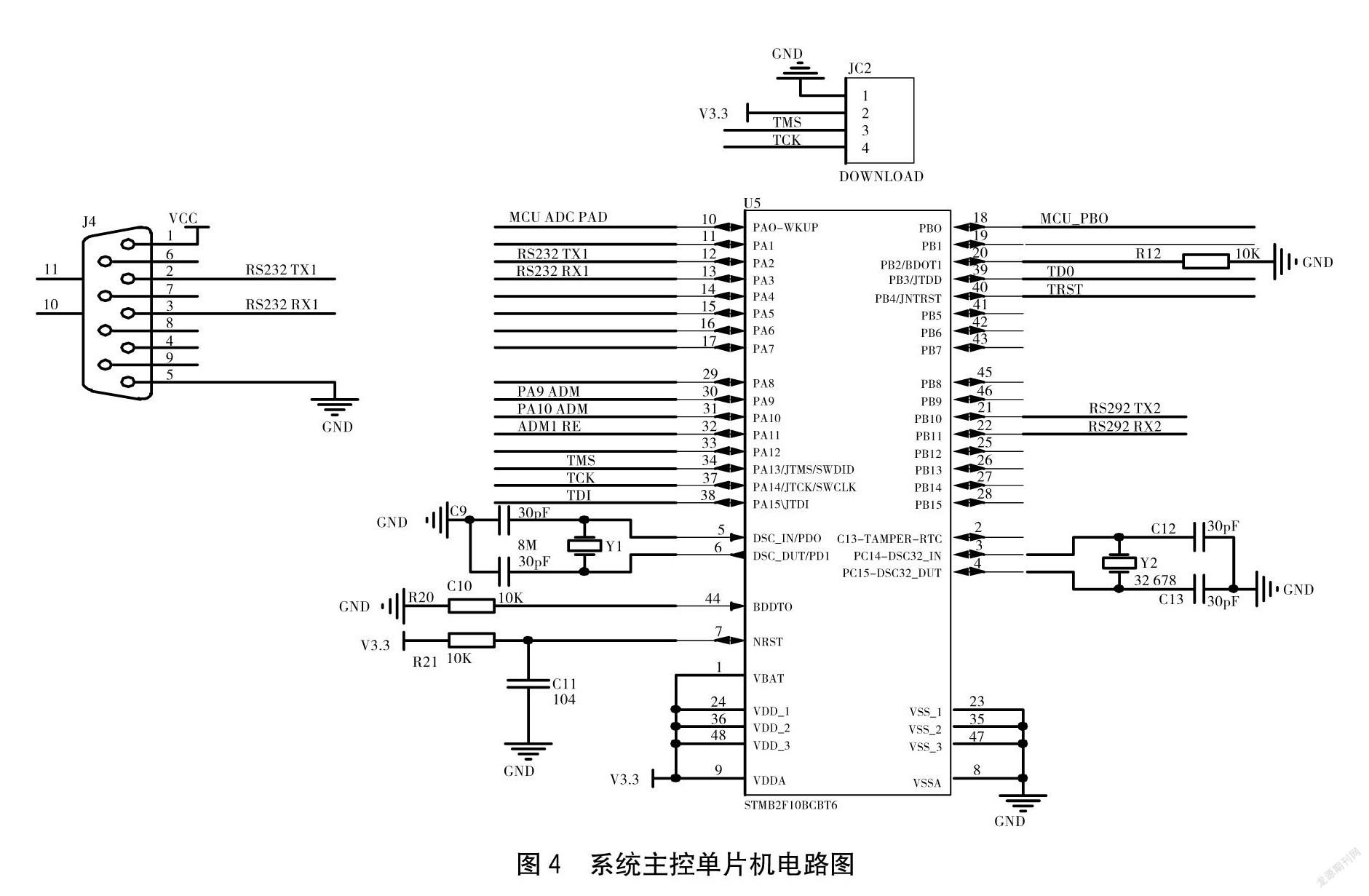
Stm32f103是一款高性能、低成本且接口豐富的增強(qiáng)型單片機(jī),它被廣泛應(yīng)用于各個(gè)領(lǐng)域的嵌入式開發(fā)。下頁(yè)圖4為系統(tǒng)的主控單片機(jī)電路圖。
2 系統(tǒng)軟件及人機(jī)交互界面設(shè)計(jì)
2.1 系統(tǒng)控制的軟件流程
系統(tǒng)控制器實(shí)時(shí)監(jiān)聽本地的HMI控制屏及無線手持控制設(shè)備發(fā)出的操作指令,當(dāng)控制器接收到數(shù)據(jù)時(shí),先判斷數(shù)據(jù)類型是控制指令還是寫參數(shù)指令,然后進(jìn)入相應(yīng)指令的功能區(qū)響應(yīng)指令的操作。具體流程如下頁(yè)圖5所示。
2.2 系統(tǒng)HMI界面的設(shè)計(jì)
系統(tǒng)的人機(jī)交互界面設(shè)計(jì)中,本地控制和手持設(shè)備上的HMI操作媒介均采用可觸摸的TFT彩屏完成設(shè)計(jì)且兩者的操作界面風(fēng)格一致,它們與MCU控制器的接口分別以RS485的方式有線對(duì)接及433M無線
數(shù)據(jù)接口對(duì)接。HMI的操作界面上,主要有四個(gè)操作按鈕控件,分別對(duì)應(yīng)啟動(dòng)順、啟動(dòng)逆、停止、后退。其中啟動(dòng)順、啟動(dòng)逆指的是啟動(dòng)設(shè)備后PVF帶順時(shí)針、逆時(shí)針纏繞工作方式的選擇。該系統(tǒng)還具有電機(jī)的實(shí)時(shí)轉(zhuǎn)速監(jiān)控、電機(jī)的轉(zhuǎn)速參數(shù)修改及PVF帶的纏包疊加比例設(shè)定滑條等功能,具體界面見圖6。
3 系統(tǒng)設(shè)備的實(shí)驗(yàn)數(shù)據(jù)、纏包效果及經(jīng)濟(jì)分析
3.1 實(shí)驗(yàn)結(jié)果的數(shù)據(jù)分析
在實(shí)驗(yàn)中,設(shè)定帶動(dòng)PVF帶纏包的旋轉(zhuǎn)電機(jī)固定轉(zhuǎn)速為850 r/min不變,將重疊帶的比例值按10%的步進(jìn)值做10組實(shí)驗(yàn)并用分辨率為1 mm刻度的軟尺進(jìn)行人工測(cè)量,測(cè)量方法是在對(duì)應(yīng)的實(shí)驗(yàn)區(qū)域隨機(jī)檢測(cè)5個(gè)固定位置點(diǎn)的PVF帶重疊寬度,并記錄數(shù)據(jù)。
由表1測(cè)量結(jié)果可知,結(jié)合設(shè)備的實(shí)際運(yùn)行狀態(tài)可知操作結(jié)果的誤差主要是轉(zhuǎn)盤帶動(dòng)PVF帶旋轉(zhuǎn)時(shí),由于轉(zhuǎn)盤配重失衡而造成的局部作業(yè)結(jié)果誤差。表1的實(shí)驗(yàn)數(shù)據(jù)顯示,系統(tǒng)實(shí)驗(yàn)操作完成的結(jié)果與設(shè)置的10組重疊比例參照數(shù)據(jù)對(duì)比分析,分析的結(jié)果是PVF帶智能纏包系統(tǒng)的纏包效果穩(wěn)定在2 mm以內(nèi)的誤差,由此可見所設(shè)計(jì)系統(tǒng)的工作結(jié)果具有良好的穩(wěn)定性。
3.2 操作結(jié)果的效率及經(jīng)濟(jì)分析
在實(shí)際應(yīng)用中,PVF帶重疊率為50%時(shí),設(shè)備以850 r/min轉(zhuǎn)速行走,以800 r/min轉(zhuǎn)速進(jìn)行纏包。根據(jù)實(shí)際操作在使用該參數(shù)工作情況下設(shè)備完成5 m長(zhǎng)度的拉索纏包需要1 min。以對(duì)300 m長(zhǎng)度的拉索進(jìn)行纏包作業(yè)計(jì)算,使用智能纏包設(shè)備纏包需時(shí)60 min,人力2人;而采用同樣人力進(jìn)行手動(dòng)纏包,在不間斷工作的前提下按平均10 s一圈的纏包速度,則300 m長(zhǎng)度的拉索纏繞600圈耗時(shí)約99 min。由此可見,PVF帶智能纏包設(shè)備的工作效率明顯比人工要高,而且隨著需要纏包的拉索長(zhǎng)度變長(zhǎng),效果更加明顯;此外利用設(shè)備纏包PVF帶,長(zhǎng)時(shí)間內(nèi)能保證PVF帶的重疊比例在很小的范圍內(nèi)變化而人工卻無法保證;同時(shí)采用智能化設(shè)備工作,可以降低工人的工作強(qiáng)度,減少因高空長(zhǎng)時(shí)間作業(yè)可能引起的一系列安全事故的發(fā)生。
4 結(jié)語
本文主要介紹了PVF帶纏包控制系統(tǒng)的硬件構(gòu)成、電路設(shè)計(jì)以及軟件實(shí)現(xiàn)方法。其主要包括系統(tǒng)通信電路的設(shè)計(jì),中小功率直流電機(jī)驅(qū)動(dòng)電路設(shè)計(jì),核心主控制器設(shè)計(jì),軟件實(shí)現(xiàn)方法的控制流程及HMI控制界面的設(shè)計(jì);該設(shè)計(jì)實(shí)現(xiàn)了基于四聯(lián)動(dòng)電機(jī)的橋梁拉索PVF帶纏包系統(tǒng)在實(shí)際橋梁施工項(xiàng)目中的應(yīng)用,能有效提高拉索PVF帶的纏包工作效率及纏包的質(zhì)量。
參考文獻(xiàn):
[1]羅 帥,劉紅軍,王 剛.斜拉索-調(diào)諧質(zhì)量阻尼器系統(tǒng)復(fù)模態(tài)分析[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2012,44(6):58-61,148.
[2]吳昱[HTXH1]劼.橋梁拉索的環(huán)境腐蝕損傷控制研究[J].遼寧:建筑與預(yù)算,2018(9):31-33.
[3]趙 軍,朱建龍,薛花娟.橋梁拉索環(huán)境腐蝕損傷控制的有效途徑[J].北京:公路,2007(7):66-69.
[4]盧民娟.PVF薄膜熱分解特性及粘接性能研究[D].北京:北京化工大學(xué),2014.
[5]郭天祥.51單片機(jī)C語言教程[M].北京:電子工業(yè)出版社,2009.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36