一種采用紅外制導的智能飛行器設計
2021-03-18 03:25:06蔡昕翰戴晟偉王子浩林凡阮玉鎮
機電信息 2021年8期
蔡昕翰 戴晟偉 王子浩 林凡 阮玉鎮

摘 要:提出了一種空中智能姿態調整飛行器的設計方案。該方案采用STM32F4系列芯片單片機作為主控制器,飛行器的設計結合了陀螺儀、涵道、舵機、紅外線傳感器等器件。該飛行器具有制導能力,可在空中調整飛行姿態。
關鍵詞:紅外制導;智能姿態調整;STM32F4單片機
0 引言
本項目來源于全國大學生機器人大賽ROBOMASTER機甲大師賽中的飛行器設計。機甲大師賽以機器人射擊對抗作為比賽的主要內容,在比賽中,飛行器主要是通過擊打距離28 m外的目標物來獲得分數,目標物上有LED紅外燈珠作為飛行器視覺識別的對象,比賽要求飛行器能夠在ROBOMASTER機甲大師賽官方所規定的發射口發射后,依靠水平尾翼和垂直尾翼在空中調整姿態,平穩飛行,并且飛行器需要在接近目標時,檢測到目標,并及時調整姿態,然后依靠慣性,對目標物進行打擊,使目標物的壓力傳感器檢測到飛行器。
1 設計原理
作為一種具有制導能力的飛行器,需具備能夠追尋目標和改變自身運動的能力。該飛行器通過控制水平尾翼和垂直尾翼來調整飛行姿態,當接近目標時,通過飛行器前頭的紅外傳感器感受光信號,及時調整姿態,使得該飛行器能準確擊中紅外目標。它通過調節水平尾翼的上下擺動產生升力抵消飛行過程的翻轉矩,并通過垂直尾翼的左右擺動調節飛行器的偏轉方向,以實現飛行器的飛行平穩可控。
設計目標:視覺識別LED紅外燈珠擊打距離28 m外的目標物。
1.1? ? 紅外制導的設計
放置在飛行器機頭的攝像頭如圖1所示,通過紅外反饋視覺信息,在快到達目標位置時,能夠識別到特別的視覺信息,這時單片機需要另一套驅動程序來應對最后的制導。由于前面飛行器的軌跡未必會次次相同,所以需要保證飛行器可以在1 m范圍內檢測到目標,并且迅速調整姿態。通過多次測試并觀察記錄數據,多次進行程序的測試,最后實現在可允許的誤差范圍內精準制導。
1.2? ? 姿態調整部分的設計
該飛行器通過調節水平尾翼的上下擺動產生升力抵消飛行過程的翻轉矩,并通過垂直尾翼的左右擺動調節飛行器的偏轉方向。以圖2所示的陀螺儀反饋的角度作為輸入數據導入PID控制函數來控制涵道的開關以及輔助翼面的舵機姿態調整。姿態調整將依據理論上的高度對應其角度和多次的實際測試來確定偏離的角度以及回調的速度。
2 系統設計
2.1? ? 硬件設計
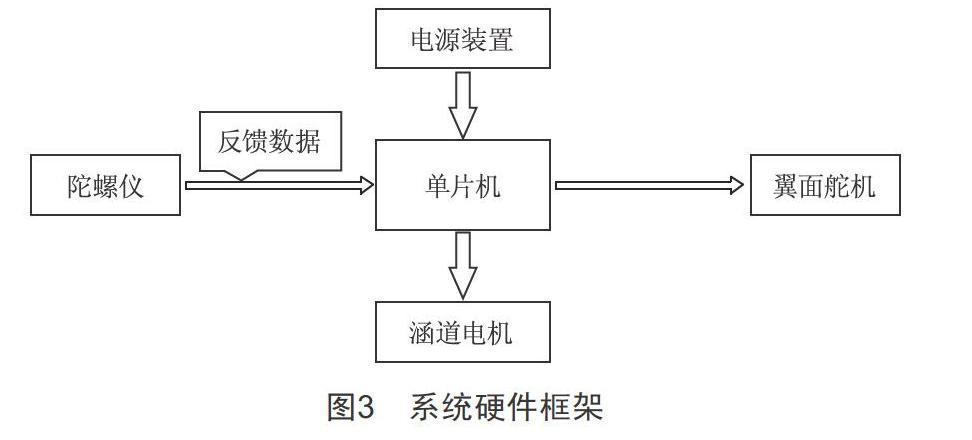
系統硬件以單片機為主體控制,連接供電裝置、舵機以及涵道和紅外裝置等設備,具體框架如圖3所示。
系統硬件主要由STM32F407VET6芯片、H219陀螺儀芯片、OpenMV模塊、系統3.3 V供電、板載DC-DC5 V供電、外部輸出DC-DC5 V、紅外制導設備供電系統等部分組成。在有限的4 cm×6 cm面積內很大程度集成了飛行器所需要的功能元器件,同時保證各部分供電安全可靠。H219陀螺儀是為飛行器提供飛行姿態判斷、調整依據的重要設備,它可以準確而迅速地提供航向角、橫滾角以及俯仰角這3個重要數據。紅外制導部分OpenMV4是一個開源、低成本、功能強大的機器視覺模塊。在小巧的硬件模塊上,用C語言高效地實現了核心機器視覺算法,提供Python編程接口。
2.2? ? 軟件設計
本程序采用C語言編程,編譯環境為keil 5。其工作流程:對系統進行初始化,運行設定的擊打控制方案,通過陀螺儀反饋的數據調整舵機和涵道的動作,接近目標后使用攝像頭通過紅外反饋視覺信息,在快到達目標位置時,識別到特別的視覺信息,這時單片機需要另一套驅動程序來應對最后的制導。飛行器確定擊打到目標或撞擊之后斷電。程序流程如圖4所示。
3 仿真與實驗
3.1? ? MATLAB仿真
飛行器在飛行過程中會受到3個方向(Lateral axis,Longitudinal axis,Normal axis,在此依次簡稱x、y、z軸)的力與力矩,運用牛頓第一定律可得知3個方向的速度、角加速度情況。以Missle DATCOM為例得到必要的系數,然后基于MATLAB Simulink軌跡仿真,如圖5所示,接著將DATCOM與CFD結果進行比對,最后得到Simulink軌跡仿真結果,如圖6所示。
當做完軌跡仿真后,飛行器按照預定參數進行配置,制作出樣機,就可以實現飛行器在空中的穩定飛行。
3.2? ? 實驗
3.2.1? ? 飛行器實物圖和設計圖
圖7所示飛行器的翼展為120 mm,機身長180 mm,垂尾高80 mm,預期重量150 g,目前重量144 g。翼型選用的是EPPLER 67,翼的弦長為100 mm,最大厚度為10.6 mm,前緣半徑為38 mm。
飛行器的重心通過多次測試的結果篩選,基本確定在焦點以前的位置,但太靠前會導致飛行器機動性能下降。測試階段使用的是較經濟的3D打印件作為機身,測試完善后使用EPP泡沫材料通過開模制造機身,增加其受沖擊載荷的能力以及使用的壽命。
3.2.2? ? 實際測試飛行
飛行器可飛行的距離在0~20 m,預期命中率為100%,目前命中率為80%。測試時,將可識別的特殊燈條放置在距離飛行器發射架16 m的位置,固定在高1.2 m的平臺上。根據需要,測試時應不斷調節動力系統的大小,使飛行器在飛行到16 m時還保持有1.2 m的高度,并且需要預留給紅外識別一段距離(0.5~1 m)的飛行時間,用來調節舵面以調整姿態并飛向目標,即需要在距離約15 m的地方識別到目標物。所以在無嵌入式控制的情況下,飛行器至少要飛到距離目標70%處,才可移交嵌入式調試。如圖8所示的測試中還發現飛行器從起飛到降落的過程中出現了一次以上roll軸的翻轉,降落的位置就無法控制,所以要保證飛行器在無嵌入式控制的前提下,空中的攻角保持在2°~20°以保持姿態平穩。
4 結語
本項設計是基于單片機對飛行器紅外制導功能的開發,使用OpenMV紅外模塊、H219陀螺儀、涵道電機等設備與單片機進行交互形成一個智能飛行姿態調整的系統,擁有紅外制導等功能。經測試,本設計紅外制導準確,具有空中姿態調整靈活、迅速等優點。作為一種小巧靈活的飛行器,它可以去到人們難以進入的區域。在消防工作中,利用溫度傳感器及其他傳感器,搭載可滅火的化學物品的制導飛行器可對指定區域進行快速滅火。
[參考文獻]
[1] 錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2011.
[2] 趙石磊,郭紅,劉宇鵬.基于軌跡跟蹤的線性時滯系統容錯控制[J].信息與控制,2015,44(4):469-473.
[3] 安樂,田甜,董勤鵬,等.CJ818飛機無線電通信、導航、監視綜合系統[J].民用飛機設計與研究,2009(Z1):131-133.
收稿日期:2021-01-04
作者簡介:蔡昕翰(1999—),男,福建漳州人,研究方向:嵌入式開發。
