機載衛星通信天線跟蹤誤差分析
2021-03-20 12:50:04田捷力顧田航
通信技術 2021年3期
田捷力,李 麒,鄧 軍,顧田航,顧 新
(1.中國電子科技集團公司第三十九研究所,陜西 西安 710065;2.陜西省天線與控制技術重點實驗室,陜西 西安 710065;3.解放軍93216 部隊,北京 100085;4.西安郵電大學,陜西 西安 710121;5.西安電子科技大學,陜西 西安 710071)
0 引言
衛星通信系統和測控系統按設備劃分,可分為信道分系統和測角分系統。信道分系統是主體,測角分系統是基礎。測角分系統包括天饋、跟蹤接收以及天線控制等。天線的指向精度和跟蹤精度是反映測角分系統性能的主要技術指標,也是決定衛星通信系統性能的重要因素。測角分系統各項誤差可導致天線的指向精度和跟蹤精度不能滿足動載體快速、可靠與實時捕獲衛星的需求,從而導致衛星鏈路中斷,數據丟失,無法正常通信。因此,在機載測角分系統的研制中,需對各器件進行正確選型,仔細評估誤差項,在設備安裝調試期間認真進行誤差標定,從而降低系統誤差,提高系統指向精度和跟蹤精度,確保通信系統的跟蹤性能[1]。
對于機載移動衛星通信系統來講,測角分系統中的天饋、跟蹤接收以及天線控制均集成在天線中。影響通信系統性能的主要因素是天線的指向精度和跟蹤精度。本文主要介紹Ku/Ka 頻段衛星天線系統組成、跟蹤方式以及根據不同的跟蹤方式分析天線的指向誤差和跟蹤誤差,估算跟蹤精度。
1 雙頻段機載衛星通信天線組成及跟蹤方式
衛星通信天線主要由雙頻段天饋設備、天線控制單元、單脈沖跟蹤接收機、傳動系統及捷聯航姿組成,如圖1 所示。
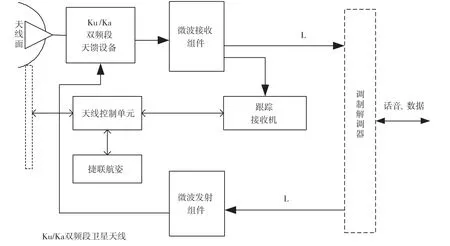
圖1 衛星通信天線系統組成
在機載衛星通信系統中,載機處于運動狀態,其姿態始終在變化。因此,機載天線必須能夠快速捕獲衛星,并始終跟蹤對準衛星,這是系統正常工作的關鍵。衛通天線通常采用單脈沖自跟蹤和程序引導(由機載慣導平臺提供飛機姿態信息INS 和定位信息GPS)來捕獲衛星。為隔離姿態的變化,機載天線還裝有陀螺穩定裝置,其隔離度可達30 dB 以上。
1.1 單脈沖自跟蹤模式
單脈沖自跟蹤模式是一種雷達精密跟蹤技術,使天線的波束固定,用單個來波信號就可以同時產生方位和俯仰的角誤差信號和方向,驅動天線方位軸和俯仰軸朝著減少誤差信號的方向運動。當天線電軸指向目標時,差方向圖的增益為零。當天線電軸偏離目標時,便產生誤差信號。該誤差信號和信號歸一化處理并解調,解調出跟蹤誤差信號。天線伺服控制設備根據這個誤差信號,驅動天線電軸指向誤差零值方向。可見,單脈沖跟蹤體制中,角誤差信號是通過測量各個波束間的相對振幅和相對相位(即比幅單脈沖或比相單脈沖)得到的。這種方式從饋源得到和信號、方位誤差信號和俯仰誤差信號。饋源網絡復雜,跟蹤精度高,適合于姿態變化劇烈且跟蹤速度和精度要求高的系統[1]。
1.2 慣導指向程序跟蹤模式
這種模式是利用慣導信息(包括載體位置信息包括經度和緯度,載體的姿態信息包括航向、橫滾和縱搖),通過空間坐標系的轉換,實時解算當前位置下天線的指向角度,驅動電機運轉和控制波束指向衛星。這種模式的優點是天線跟蹤系統組成簡單,無須額外的信號解調合成處理,直接利用載體已有的高精度慣導設備就可完成跟蹤。它的缺點是對載體慣導設備的精度和可靠性要求很高,且慣導自身精度隨著時間漂移大的問題直接影響天線指向精度[2]。
1.3 Ku/Ka 雙頻段衛星通天線跟蹤方式
對于機載Ku/Ka 雙頻段衛星通系統來說,飛機在高空高速飛行時姿態變化大、飛機振動強,而且機載衛星天線的波束較窄。特別是Ka 頻段,天線方向圖波束寬度僅有1.2°[3]。采用何種天線跟蹤方式,直接影響系統的指向精度和跟蹤精度。選取捕獲速度快的單通道單脈沖閉環跟蹤體制與采用光纖捷聯航姿設備開環引導方式相結合的跟蹤方式,可以快速捕獲衛星目標并進行精確跟蹤。
在載機初始對準衛星時,利用捷聯航姿的實時姿態信息進行初始程序引導。在載機飛行過程中,為了確保在運動顛簸狀態下對衛星的準確跟蹤,在Ku 頻段和Ka 頻段工作時都可進行閉環單脈沖自跟蹤,并增加了速率陀螺補償,隔離載體擾動。兩種跟蹤方式可以相互切換。
當系統啟動后,天線控制單元將飛機經度、緯度和衛星方位角傳給捷聯航姿單元,使捷聯航姿完成初始標定。標定結束后,捷聯航姿進入導航狀態,開始解算載體的實時姿態角和經緯度。此時,機體運動帶來的姿態變化和位置變化被姿態穩定單元跟隨檢測。當天線自跟蹤正常工作時,捷聯航姿輸出的經緯度與從天線控制單元的經緯度進行比較,用比較差值法估算捷聯航姿漂移并修正其輸出的姿態角,使輸出姿態角和經緯度均保持在較高精度,再根據天線控制單元當前的衛星方位角、衛星高低角、衛星極化角及跟蹤時方位碼盤值、跟蹤時高低碼盤值,按固定的計算公式計算出機體天線正確跟蹤衛星需要的方位、高低以及極化角度碼盤值。天線控制單元接收到此信息后就可以驅動電機帶動天線旋轉到對應碼盤值,達到隔離機體運動的目的,進而使衛通天線完全鎖定衛星。
2 指向跟蹤誤差分析
跟蹤精度是指天線電軸對準目標的準確度,由跟蹤誤差來衡量的。跟蹤誤差包括隨機誤差和系統誤差。系統誤差是相對不變或有一定的變化規律,可以用函數關系來描述的一類誤差。對于機載移動天線,結構軸系誤差、載體形變誤差、天線罩瞄準線誤差以及伺服動態滯后誤差等,可以通過測量、標效的方法進行修正減小。隨機誤差是一種不可預測、變化沒有規律的誤差,可以用統計學的方法進行計算和分析,通過平滑濾波進行抑制。它與饋源的移相誤差、通道耦合誤差、接收機的熱噪聲和性能誤差、機械結構的軸系誤差、陣風誤差以及伺服系統的性能等因素相關。
天線系統的指向精度定義為天線波束軸方向與指令方向之間的空間角誤差,由信息源精度、伺服環路以及結構誤差等組成。
2.1 動態滯后誤差
通常,動態滯后誤差是較大的誤差項。在自跟蹤模式下,當飛機飛行時天線的電軸會跟不上目標,電軸滯后目標一個角度,稱為動態滯后誤差。動態滯后的誤差主要由天線運動的加速度分量引起,采用提高天線伺服控制頻率、提高采樣率、跟蹤接收機的誤差電壓滿足一定的定向靈敏度、天饋系統的差方向圖要滿足一定的差斜率等方法,可以減小動態滯后誤差。工程設計經驗和動態實測數據顯示,天線方位和俯仰軸上的動態滯后誤差約為0.2°。對于機載設備,動態滯后誤差可通過實時動態滯后修正并平滑處理后再進行坐標變換上報的方法來動態修正。
2.2 天線罩瞄準線誤差
在載機運動中,天線與衛星目標的相對變化可引起天線與天線罩的相對位置的改變,從而導致天線輻射場透過天線罩罩壁的入射角發生改變。天線罩罩壁對電磁波的相位插入和折射造成天線波束偏移,直接影響天線的跟蹤誤差。根據對天線罩瞄準線誤差原理的分析,可以通過對天線帶罩狀態和不帶罩狀態的電性能測量,比較差方向圖零深位置的變化,經過計算分析可以得到天線罩的瞄準線誤差。根據測量,天線主波束指向折射的偏差大約0.15°,采用分段二階線性擬合的方法得到天線罩瞄準線誤差補償模型進行修正[3]。
2.3 機體變形誤差
衛星通信天線與捷聯航姿設備安裝在載機的不同位置,盡管要求在同一平面,但載機任務飛行時,機體彈性變形仍會引起這兩種設備的基準工作水平面發生扭動。經過多次任務試驗測定,兩基準面變動對天線指向產生的誤差均方根值為0.2°,這部分誤差可以通過伺服算法進行修正[3]。
2.4 隔離殘差
對于機載Ku/Ka 頻段衛星天線,半功率波束寬度較窄,Ka 頻段約為1.2°,Ku 頻段約為2.6°,使得天線伺服控制系統必須具備很強的抗擾性。目前,一般采用在天線上加裝陀螺的方法提高系統的隔離度。經過試驗,隔離殘差約為0.19°,在飛機顛簸和轉彎條件下,目標不丟失。
2.5 軸角編碼器編碼誤差和零位標定誤差
編碼器是用于測定天線的指向角度。由于它自身的誤差,可導致天線不能準確指向衛星。這個誤差由角度傳感器性能決定,無法消除,需對其精度進行測定,確保其在一定的誤差范圍內。編碼零值標校實質是對測量系方位、俯仰以及極化軸角度零值進行標定。天線系統自跟蹤穩定正常后,利用信標對天線各軸進行精確的角度標定,裝機后還應根據載機的位置利用同步衛星對方位軸、俯仰軸和極化軸的零位再次進行標定。此誤差可經過標定減少誤差[4]。
2.6 結構安裝誤差
對于移動機載天線,結構設計存在很高的難度,要求其具備剛度好、動態變形小、軸系精度高、諧振頻率高等特點,同時要滿足體積小、重量輕和結構緊湊。因此,在安裝裝機時必須盡力減小安裝誤差。天線的安裝誤差主要包括方位俯仰軸不正交產生的誤差、機械軸和電軸偏差以及大盤不水平引起的誤差等。此誤差可經過標定減少誤差。
2.7 慣導誤差
慣導為機載天線提供載機的實時位置(經度、緯度及高度)和實時姿態(方位、俯仰及橫滾)等參數,因此慣導的精度和響應速度對整個天線系統指向精度的影響至關重要[5]。本系統捷聯航姿的姿態和位置精度小于0.12°(均方根值)。
2.8 總誤差分析
天線系統在Ku 頻段和Ka 頻段均可采用單脈沖自跟蹤方式和基于捷聯慣導的指向跟蹤方式工作。對于系統誤差,在系統標定時已進行修正減小,修正后的誤差約為0.15°,其他誤差均屬隨機誤差。由于Ka 頻段波束較窄,這里只分析Ka 頻段跟蹤誤差和指向誤差。
當采用單脈沖自跟蹤方式時,誤差源在假定外界擾動為±15°/s 的條件下,當跟蹤隔離度為34 dB時,Ka 頻段跟蹤誤差的主要誤差源及其貢獻如表1所示[1]。Ka 頻段的波束寬度為1.2°,跟蹤誤差估算均方根值為0.21°,滿足誤差不大于1/5 的波束寬度需求。實際在搖擺狀態下采用誤差電壓測試法跟蹤衛星進行測試,測試均方根值為0.15°,驗證了估算的準確性。
當采用基于姿態穩定單元的指向跟蹤方式工作時,指向誤差主要由捷聯航姿的精度、伺服環路以及結構誤差等因素組成。其中,編碼精度各個誤差項包括旋變誤差0.05°、編碼誤差0.04°、旋變安裝誤差0.02°,總計0.07°(均方根值);慣性導航飛機姿態和位置誤差取0.12°(均方根值),指向誤差預計如表2 所示,滿足指向精度為1/5 波束寬度的需求。實際在搖擺狀態下測試,測試值為0.2°,驗證了估算的準確性[1]。
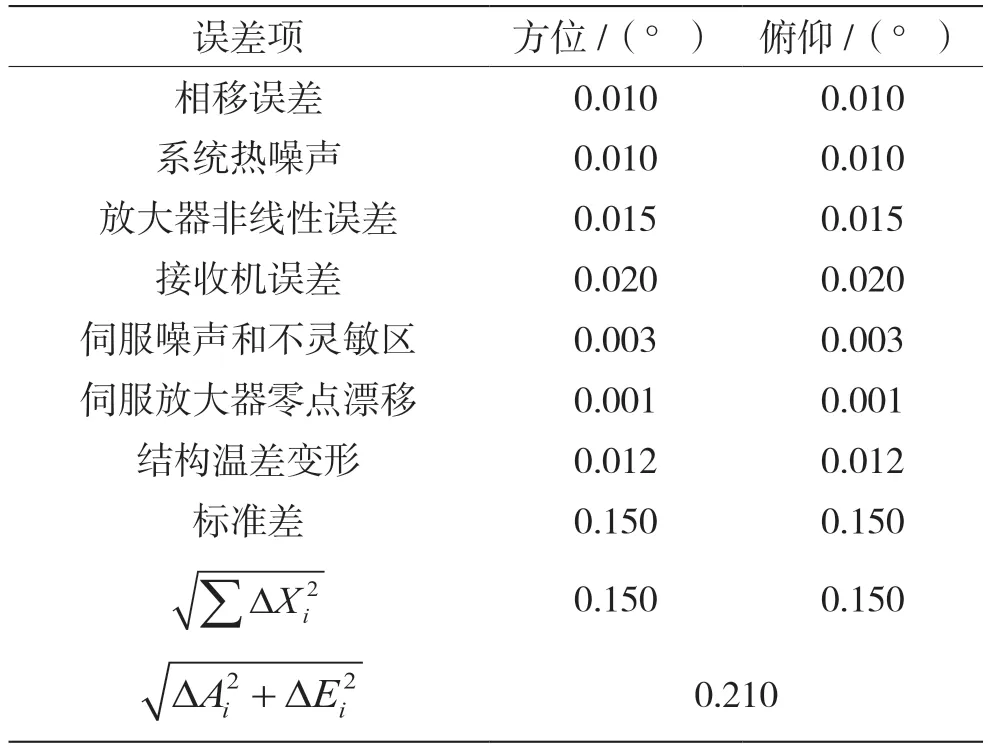
表1 Ka 頻段跟蹤誤差估算
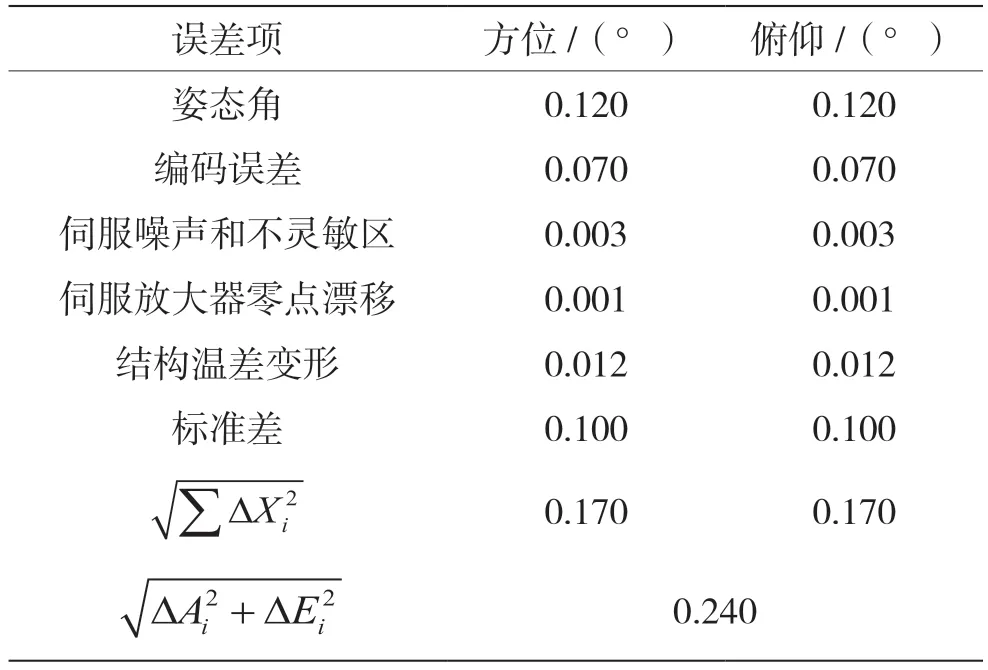
表2 指向誤差估算結果
3 結語
本文介紹了機載Ku/Ka 雙頻段衛星通信天線系統組成和跟蹤方式,分析了影響機載天線指向誤差和跟蹤誤差的主要因素,給出了估算值和實測數據,驗證了估算的準確性。可知,提高跟蹤接收機、伺服控制的跟蹤性能可以有效提高系統跟蹤精度,而慣導的精度是影響指向精度的主要因素。
