單接收機(jī)時(shí)間差分實(shí)時(shí)位移計(jì)算及分析*
2021-03-20 08:10:38段太生王靠省楊維裕干堅(jiān)定
工程技術(shù)研究 2021年1期
周 適,段太生,王靠省,楊維裕,郭 平,晏 勇,干堅(jiān)定
1.中鐵二局集團(tuán)有限公司,四川 成都 610031
2.中鐵二局第五工程有限公司,四川 成都 610091
目前,動(dòng)態(tài)測量技術(shù)在工程上應(yīng)用較廣泛的是常規(guī)RTK 技術(shù)和網(wǎng)絡(luò)RTK 技術(shù)。常規(guī)RTK 技術(shù)工作范圍一般為10 ~15km,若超出工作范圍,定位精度無法達(dá)到厘米級(jí)[1]。流動(dòng)站離基準(zhǔn)站越近,定位精度越高。根據(jù)工程實(shí)際經(jīng)驗(yàn),觀測條件較好的地區(qū)時(shí)整周模糊度能得到正確的雙差固定解,定位精度能達(dá)到1cm 甚至幾毫米,一般情形下定位精度在2cm 以下[2]。常規(guī)RTK 技術(shù)采用單基站模式,數(shù)據(jù)采用電臺(tái)超高頻UHF 傳輸RTCM 差分信號(hào),常規(guī)RTK 技術(shù)將定位作業(yè)范圍限制在離基準(zhǔn)站周圍較小的區(qū)域,因此假設(shè)流動(dòng)站和基準(zhǔn)站相對(duì)電離層延遲較小是合理的[3],一旦流動(dòng)站和基準(zhǔn)站距離超過一定范圍,則無法滿足厘米級(jí)的定位精度。
網(wǎng)絡(luò)RTK 技術(shù)又稱多基準(zhǔn)站RTK 定位技術(shù),目前最常用的是虛擬參考站技術(shù)(VRS),此外還包括區(qū)域改正數(shù)技術(shù)(FKP)和主輔站技術(shù)(MAX)。網(wǎng)絡(luò)RTK 技術(shù)由于采用多基準(zhǔn)站同時(shí)作業(yè),當(dāng)一個(gè)連續(xù)運(yùn)行基準(zhǔn)站(CORS)出現(xiàn)故障時(shí),仍然可以通過其他正常的參考站進(jìn)行定位,因此提高了系統(tǒng)的可靠性。
與常規(guī)RTK 技術(shù)相比,擴(kuò)大了作業(yè)范圍,定位精度分布均勻,精度能達(dá)到厘米級(jí)。常規(guī)RTK 技術(shù)在一定的工作范圍內(nèi)定位精度和網(wǎng)絡(luò)RTK 技術(shù)不相上下,但隨著流動(dòng)站與基準(zhǔn)站距離不斷增大,常規(guī)RTK 技術(shù)無法達(dá)到網(wǎng)絡(luò)RTK技術(shù)的定位精度。未來在中國大部分區(qū)域,網(wǎng)絡(luò)RTK 技術(shù)將取代常規(guī)RTK 技術(shù)進(jìn)行動(dòng)態(tài)定位測量。網(wǎng)絡(luò)RTK 技術(shù)在中國地區(qū)正在飛速發(fā)展,部分區(qū)域CORS 站布設(shè)密度和相關(guān)技術(shù)能力已經(jīng)能滿足區(qū)域厘米級(jí)定位精度要求。若繼續(xù)提高覆蓋范圍,需要布設(shè)更多的CORS 站,這增加了系統(tǒng)復(fù)雜性和維護(hù)成本。
文章采用單接收機(jī)時(shí)間差分原理進(jìn)行動(dòng)態(tài)定位,處理方法簡單,不需要架設(shè)基站和接收精密星歷(接收廣播星歷即可),只需使用一臺(tái)GNSS 接收機(jī),不需要通信設(shè)備,定位精度能達(dá)到厘米級(jí),但該方法也存在一定局限性,如測試數(shù)據(jù)穩(wěn)定性不足,平面定位精度在2cm 以下的維持時(shí)間較短,還需進(jìn)行深入研究,但從技術(shù)創(chuàng)新角度來看,這是一種簡易動(dòng)態(tài)定位方法。下面首先簡要介紹單接收機(jī)時(shí)間差分定位的數(shù)學(xué)模型,并通過C#編程實(shí)現(xiàn),再利用實(shí)測數(shù)據(jù)進(jìn)行測試和分析。
1 單接收機(jī)時(shí)間差分定位的數(shù)學(xué)模型(GPS 單系統(tǒng))
將GNSS 接收機(jī)架設(shè)在A 點(diǎn)上,文章采用的數(shù)學(xué)模型以GPS 衛(wèi)星信號(hào)為例,BDS 可同理寫出。在時(shí)刻t1,對(duì)參考衛(wèi)星r 發(fā)送L1頻率衛(wèi)星信號(hào),可列出線性化后的觀測方程[4]:


同理,對(duì)于其他衛(wèi)星s,可列出觀測方程:
對(duì)于1 個(gè)歷元接收到的n 顆GPS 衛(wèi)星,除了參考衛(wèi)星r,其他衛(wèi)星數(shù)量為n-1,式(2)可列出n-1 個(gè)方程。將其他衛(wèi)星s 和參考衛(wèi)星r 進(jìn)行星間單差[5],即用式(2)減去式(1),此時(shí)可消去C·dtt1,,即消去接收機(jī)鐘差影響項(xiàng)可得到如下方程:
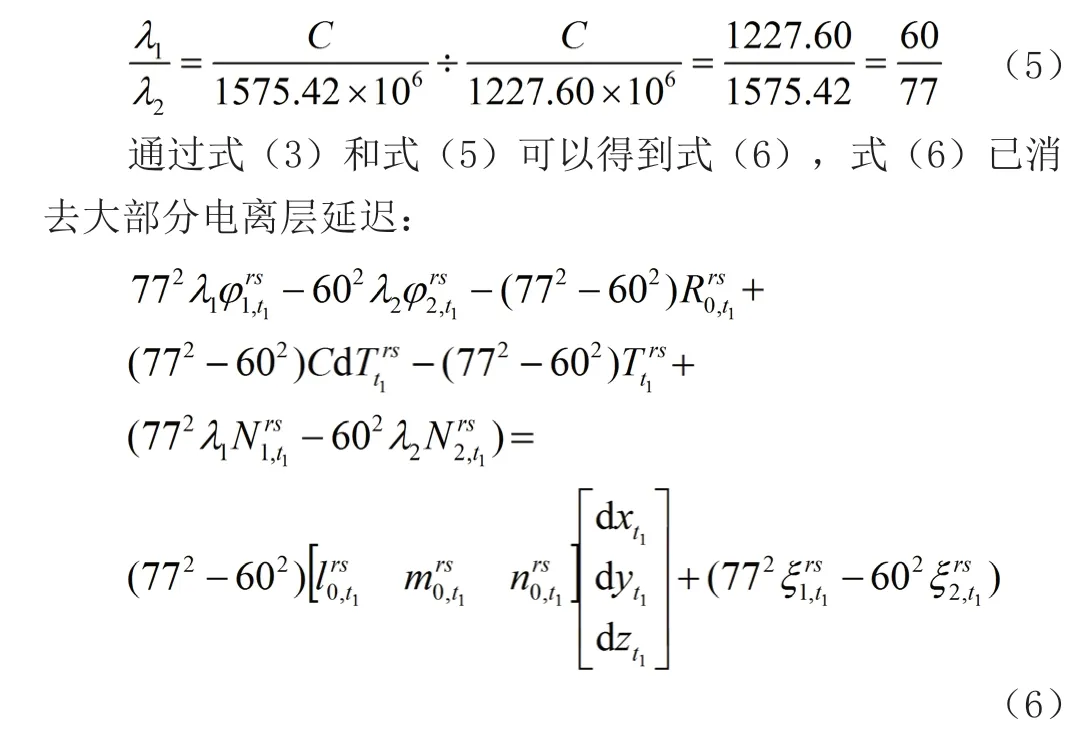
組合不同頻率的觀測值,采用無電離層模型,由于GPS的L1頻率值為1575.42MHz,L2頻率值為1227.60MHz,可寫出GPS 兩個(gè)頻率的波長比值:
同理,從A 點(diǎn)移動(dòng)到B 點(diǎn),時(shí)刻從t1變化為t2,可列出式(7):


式(11)中,為求權(quán)陣P,可根據(jù)誤差傳播定律對(duì)方差陣D 進(jìn)行推導(dǎo),將式(8)中方程左邊觀測值展開后,可得式(12):

先賦值參考衛(wèi)星r 的系數(shù),再賦值其他衛(wèi)星s 的系數(shù),由于星間單差每個(gè)觀測方程都是其他衛(wèi)星和參考衛(wèi)星作差,設(shè)歷元t1時(shí)刻到t2時(shí)刻的GPS 公共衛(wèi)星數(shù)量為n,除了參考衛(wèi)星r,其他衛(wèi)星數(shù)量為n-1。可列出n-1 個(gè)觀測方程,系數(shù)矩陣K 的行數(shù)為n-1,列數(shù)為4n,第1 ~4 列為參考衛(wèi)星r 的系數(shù),第5 ~8 列為其他衛(wèi)星中第1 顆衛(wèi)星的系數(shù),依次類推,矩陣第n-1 行最后4 列是第n-1 顆衛(wèi)星的系數(shù)。系數(shù)矩陣K 可表示為式(13):
對(duì)比GPS 兩個(gè)不同頻率的波長比值,將式(6)~式(14)中的77 替換成763,60 替換成590,即得到單獨(dú)BDS 系統(tǒng)下時(shí)間差分計(jì)算位移基線向量的數(shù)學(xué)模型。
若采用BDS 和GPS 混合衛(wèi)星系統(tǒng),則星間單差計(jì)算方式有兩種[9]:一種是采用GPS 和BDS 各選擇系統(tǒng)內(nèi)的一個(gè)參考衛(wèi)星,分開組合星間單差;另一種是僅選擇一個(gè)參考衛(wèi)星,組混合單差。考慮到組混合單差需要引入系統(tǒng)間偏差,算法較為復(fù)雜,文章采用第一種計(jì)算方式,即BDS 和GPS 分別各選擇系統(tǒng)內(nèi)的一顆衛(wèi)星作為參考衛(wèi)星,按照上述

設(shè)載波相位觀測值方差陣為Dφ,載波相位觀測值精度可近似為波長的1/100,考慮不同衛(wèi)星的高度角不同,高度角越高的衛(wèi)星權(quán)值越大,方差越小[7],不同頻率、不同時(shí)刻的載波相位值是獨(dú)立不相關(guān)的[8],載波相位觀測值方差陣Dφ行數(shù)和列數(shù)均為4n,矩陣主對(duì)角線上每4 個(gè)值為1 組,首先是參考衛(wèi)星r 的載波相位觀測值方差(L1頻率t2時(shí)刻、L1頻率t1時(shí)刻、L2頻率t2時(shí)刻、L2頻率t1時(shí)刻),然后是其他衛(wèi)星的載波相位觀測值方差,從第1 顆衛(wèi)星開始一直到第n-1 顆衛(wèi)星,方差陣除了主對(duì)角線的元素有數(shù)值(非零),其余元素值為0(協(xié)方差為0 表示獨(dú)立不相關(guān)),方差陣 Dφ的主對(duì)角線元素可表示為式(14):

以上為單接收機(jī)在GPS 單衛(wèi)星系統(tǒng)下時(shí)間差分計(jì)算位移基線向量的數(shù)學(xué)模型。
2 單接收機(jī)時(shí)間差分位移基線向量的數(shù)學(xué)模型
前文已介紹GPS 單衛(wèi)星系統(tǒng)下利用時(shí)間差分模型計(jì)算的位移基線向量,下面介紹BDS 單衛(wèi)星系統(tǒng)和GPS、BDS 混合衛(wèi)星系統(tǒng)下該數(shù)學(xué)模型的使用方法。文章采用的是雙頻無電離層模型,BDS 的B1和B2頻率值分別為1561.098MHz、1207.140MHz,寫出BDS 兩個(gè)頻率的波長比:公式進(jìn)行計(jì)算。

設(shè)歷元t1時(shí)刻到t2時(shí)刻,歷元間接收機(jī)能接收到的公共衛(wèi)星信息,有n 顆北斗衛(wèi)星,m 顆GPS 衛(wèi)星的觀測數(shù)據(jù),可寫出組合衛(wèi)星系統(tǒng)的誤差方程式:
3 實(shí)測數(shù)據(jù)計(jì)算及精度分析
筆者按照上述單接收機(jī)時(shí)間差分計(jì)算位移基線向量的數(shù)學(xué)模型,利用C#語言進(jìn)行編程。為測試該方法的定位精度,特選擇一組靜態(tài)數(shù)據(jù),由于靜態(tài)數(shù)據(jù)沒有位移,時(shí)間差分計(jì)算的位移值基線向量理論上應(yīng)該為0,這樣便于比較各歷元計(jì)算的結(jié)果。測試數(shù)據(jù)采用北方地區(qū)某控制點(diǎn)外業(yè)靜態(tài)數(shù)據(jù),采樣間隔為10s,高度截止角為15°。這里只對(duì)前30min 的數(shù)據(jù)計(jì)算結(jié)果進(jìn)行數(shù)據(jù)分析,根據(jù)其他若干大量數(shù)據(jù)計(jì)算證實(shí),該方法達(dá)到平面厘米級(jí)精度(平面定位誤差在10cm 以下)持續(xù)的時(shí)間一般小于30min,30min 后計(jì)算的結(jié)果精度不能滿足厘米級(jí)的精度要求。展示采用GPS 單衛(wèi)星系統(tǒng),BDS 單衛(wèi)星系統(tǒng),GPS、BDS 混合衛(wèi)星系統(tǒng)計(jì)算的位移基線向量結(jié)果,并進(jìn)行比較分析。
圖1 單接收機(jī)外業(yè)操作流程圖
計(jì)算得到的位移基線向量是空間直角坐標(biāo)系下的(ΔX,ΔY,ΔZ),為便于直觀顯示平面和高程方向的位移數(shù)值,將其轉(zhuǎn)換為站心坐標(biāo)系下的位移基線向量(ΔN,ΔE,ΔU)[10],即計(jì)算北、東、天各方向上的位移數(shù)值。單獨(dú)GPS 衛(wèi)星系統(tǒng)下計(jì)算得到的N、E、U 方向的位移基線向量各分量數(shù)值見圖2 ~圖4;單獨(dú)BDS 衛(wèi)星系統(tǒng)下計(jì)算得到的N、E、U 方向的位移基線向量各分量數(shù)值見圖5 ~圖7;GPS、BDS 混合衛(wèi)星系統(tǒng)下計(jì)算得到的N、E、U 方向的位移基線向量各分量數(shù)值見圖8 ~圖10。在圖2 ~圖10 中,橫坐標(biāo)為統(tǒng)計(jì)的歷元數(shù),第0 個(gè)歷元為初始?xì)v元,測站坐標(biāo)采用偽距單點(diǎn)定位計(jì)算的結(jié)果,未在圖中展示,從第1 個(gè)歷元到第183 個(gè)歷元,歷元間采樣間隔為10s,均是與第0個(gè)歷元進(jìn)行時(shí)間差分計(jì)算后得出的位移基線向量結(jié)果。縱坐標(biāo)為N、E、U 各方向上的位移分量值,單位為cm。
從圖2 ~圖10 中可看出,GPS、BDS 混合衛(wèi)星系統(tǒng)計(jì)算結(jié)果整體穩(wěn)定性略優(yōu)于GPS 和BDS 單衛(wèi)星系統(tǒng)。以第30min(采樣間隔為10s,相當(dāng)于第180 個(gè)歷元)計(jì)算的位移基線向量值為例,GPS、BDS 混合衛(wèi)星系統(tǒng)下:N 方向?yàn)?.43cm,E 方向?yàn)?0.56cm,U 方向?yàn)?4.12cm。
圖2 GPS 單衛(wèi)星系統(tǒng)下N 方向各歷元時(shí)間差分位移分量值

圖3 GPS 單衛(wèi)星系統(tǒng)下E 方向各歷元時(shí)間差分位移分量值

圖4 GPS 單衛(wèi)星系統(tǒng)下U 方向各歷元時(shí)間差分位移分量值

圖5 BDS 單衛(wèi)星系統(tǒng)下N 方向各歷元時(shí)間差分位移分量值

圖6 BDS 單衛(wèi)星系統(tǒng)下E 方向各歷元時(shí)間差分位移分量值

圖7 BDS 單衛(wèi)星系統(tǒng)下U 方向各歷元時(shí)間差分位移分量值

圖8 GPS、BDS 混合衛(wèi)星系統(tǒng)下N 方向各歷元時(shí)間差分位移分量值

圖9 GPS、BDS 混合衛(wèi)星系統(tǒng)下E 方向各歷元時(shí)間差分位移分量值

圖10 GPS、BDS 混合衛(wèi)星系統(tǒng)下U 方向各歷元時(shí)間差分位移分量值
GPS 單衛(wèi)星系統(tǒng)下:N 方向?yàn)?.69cm,E 方向?yàn)?1.96cm,U 方向?yàn)?8.31cm。BDS 單衛(wèi)星系統(tǒng)下:N 方向?yàn)?.64cm,E方向?yàn)?2.54cm,U 方向?yàn)?9.74cm。根據(jù)數(shù)據(jù)可知,GPS、BDS 混合衛(wèi)星系統(tǒng)下在第180 個(gè)歷元時(shí)的計(jì)算位移值,在E、U 方向上比單衛(wèi)星系統(tǒng)下小,只是N 方向計(jì)算位移值比GPS單系統(tǒng)略大,但比BDS 單衛(wèi)星系統(tǒng)位移計(jì)算值小。相鄰歷元間的位移基線向量變化不大,平面N、E 方向向量變化均在1cm 以下。單接收機(jī)時(shí)間差分計(jì)算位移基線向量的精度隨著時(shí)間推移逐漸下降,這是由于歷元間誤差的相關(guān)性逐漸減弱引起的[11]。其中,高程U 方向定位精度明顯低于平面N、E 方向定位精度,且隨著時(shí)間的推移,高程U 方向精度下降速率明顯快于平面N、E 方向。若以平面厘米級(jí)精度(N、E 方向位移基線向量小于10cm)作為衡量指標(biāo),GPS 單衛(wèi)星系統(tǒng)下,第161 個(gè)歷元(第26.8min)E 方向位移計(jì)算值達(dá)到10.28cm,BDS 單衛(wèi)星系統(tǒng)下,第146 個(gè)歷元(第24.3min)E 方向位移計(jì)算值達(dá)到10.14cm,GPS、BDS混合衛(wèi)星系統(tǒng)下,第163 個(gè)歷元(第27.1min)E 方向位移計(jì)算值達(dá)到10.13cm。綜合GPS 單衛(wèi)星系統(tǒng),BDS 單衛(wèi)星系統(tǒng),GPS、BDS 混合衛(wèi)星系統(tǒng)三種情形下的計(jì)算結(jié)果,時(shí)間差分計(jì)算位移基線向量精度能達(dá)到平面厘米級(jí)的持續(xù)時(shí)間約25min,超出這個(gè)時(shí)間后,計(jì)算精度不能滿足平面厘米級(jí)的精度要求,這主要是由于時(shí)空效應(yīng)引起的。該計(jì)算模型依據(jù)傳播路徑上對(duì)流層、電離層延遲等誤差在短時(shí)間內(nèi)具有較強(qiáng)相關(guān)性和沒有周跳發(fā)生時(shí)模糊度固定不變的特點(diǎn),但隨著時(shí)間的推移,對(duì)流層延遲等參數(shù)不再具有強(qiáng)相關(guān)性[12],接收機(jī)鐘差、多路徑效應(yīng)也需要納入誤差模型考慮范圍,因而直接利用歷元間作差求解的數(shù)學(xué)模型就暴露出其缺陷。與常規(guī)RTK 技術(shù)進(jìn)行對(duì)比,常規(guī)RTK 技術(shù)因?yàn)榛鶞?zhǔn)站始終有一臺(tái)GNSS 接收機(jī)接收衛(wèi)星觀測值,可收集和分析對(duì)流層延遲等改正參數(shù),利用基準(zhǔn)站和流動(dòng)站進(jìn)行差分求解運(yùn)算,因此可消除一定范圍內(nèi)強(qiáng)相關(guān)性的誤差,且精度不會(huì)隨著時(shí)間推移明顯下降,除非發(fā)生衛(wèi)星失鎖或電臺(tái)通信中斷等情形。
文章采用的計(jì)算方法,雖然只采用一臺(tái)接收機(jī),不需要電臺(tái)通信,但是移動(dòng)過程中衛(wèi)星不能失鎖,且平面定位精度在厘米級(jí)的時(shí)間較短,隨著時(shí)間的推移,精度逐漸越低。若以平面2cm 的精度作為衡量指標(biāo),則持續(xù)時(shí)間更短,單衛(wèi)星系統(tǒng)下平面能達(dá)到2cm 精度的時(shí)長約3min,GPS、BDS混合衛(wèi)星系統(tǒng)下平面能達(dá)到2cm 精度的時(shí)長也不到5min。一般而言,2cm 以下的定位測量精度對(duì)于實(shí)際工程測量才有利用價(jià)值,但該方法能達(dá)到2cm 精度維持的時(shí)間太短,該方法的實(shí)際利用價(jià)值還需要進(jìn)一步的探討和研究。該方法與網(wǎng)絡(luò)RTK 技術(shù)對(duì)比,網(wǎng)絡(luò)RTK 技術(shù)因?yàn)槎ㄎ痪鹊姆€(wěn)定性、可靠性、大范圍、長時(shí)間等顯著特點(diǎn),具有非常好的發(fā)展前景,是未來動(dòng)態(tài)定位的趨勢和發(fā)展方向。
4 結(jié)束語
文章對(duì)GPS、BDS 混合衛(wèi)星系統(tǒng)下,單接收機(jī)時(shí)間差分計(jì)算位移基線向量的算法進(jìn)行了詳細(xì)介紹,并通過實(shí)測數(shù)據(jù)進(jìn)行測試,得出了以下結(jié)論:(1)單接收機(jī)時(shí)間差分計(jì)算位移基線向量的精度隨著時(shí)間推移逐漸下降,這是由于歷元間誤差的相關(guān)性逐漸減弱引起的,其中,高程U 方向精度低于平面N、E 方向的精度,且隨著時(shí)間的推移,高程U 方向精度下降速率明顯快于平面N、E 方向。(2)GPS、BDS 混合衛(wèi)星系統(tǒng)下定位精度整體穩(wěn)定性略優(yōu)于GPS 和BDS單衛(wèi)星系統(tǒng)的定位精度。若以平面厘米級(jí)精度(N、E 方向定位誤差小于10cm)作為衡量指標(biāo),則采用文章方法能維持平面厘米級(jí)精度的時(shí)間在25min 內(nèi),超出一定的時(shí)間范圍后,定位精度無法達(dá)到10cm。(3)單接收機(jī)時(shí)間差分模型進(jìn)行動(dòng)態(tài)定位的算法與常規(guī)RTK 技術(shù)和網(wǎng)絡(luò)RTK 技術(shù)進(jìn)行對(duì)比,由于文章模型無法解決定位精度會(huì)隨著時(shí)間推移明顯降低這一問題,因此還存在明顯缺陷,需要進(jìn)一步加強(qiáng)研究。網(wǎng)絡(luò)RTK 技術(shù)在未來動(dòng)態(tài)定位中具有可以預(yù)見的發(fā)展前景。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34