一種基于功能安全的新能源汽車能量管理方案
2021-03-22 09:10:20王春麗肖小城梁長飛沙文瀚方濤丁凌志
電子產品世界 2021年11期
關鍵詞:新能源
王春麗 肖小城 梁長飛 沙文瀚 方濤 丁凌志
摘 要:介紹一種基于功能安全的新能源汽車能量管理方案,并闡述了在保證整車動力性的同時,合理保證能量分配,對能量的流動做實時監控。重點介紹了能量管理的基本功能及其在控制上的實現方法。
關鍵詞:新能源;能量管理方案;功能安全
*奇瑞全鋁車身A0級純電動SUV研發及產業化(16030901035)資助
0 引言
該能量管理方案主要考慮高壓動力電池系統的能量分配。電池的能量不能充分利用,影響整車的動力性、高壓附件的舒適性能等,但電池能量的過度使用會導致電池衰減,對電池造成不可逆的傷害,所以對于新能源汽車來說,動力電池能量的有效分配和監控十分必要。
純電動汽車的能量來自動力電池系統。動電池的可用功率主要用于驅動系統和高壓負載,其中高壓負載包括空調系統制冷、制熱和DCDC 轉換;
電池管理系統根據電池的單體參數估算電池的峰值功率以及持續放電功率,為保證整車動力性,整車中央控制單元優先使用峰值功率。當峰值功率持續時間截止,切換使用電池的可持續放電功率,充分利用電池的可用功率。
在充分利用電池功率的同時,要充分考慮系統效率,尤其在低電量時,電池功率較低,動力需求較大,在功率不足情況下易導致負載功率超出電池的范圍,影響電池壽命。
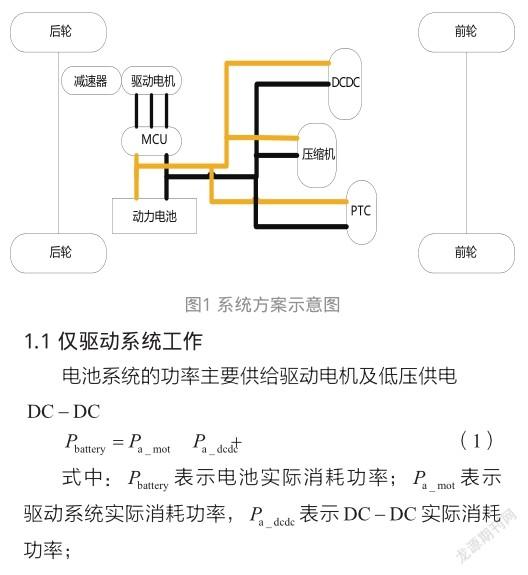
1 系統方案分析
該能量管理系統包括動力電池模塊、電機減速器三合一模塊。壓縮機模塊。PTC模塊和DCDC 模塊(如圖1)。
動力性與電池保護方面的優勢:
1)動力電池峰值功率保證各系統工作,同時提高系統動力性能;
2)低電量時,可實時平衡舒適性與動力性,合理化系統需求扭矩,防止電池系統過放。
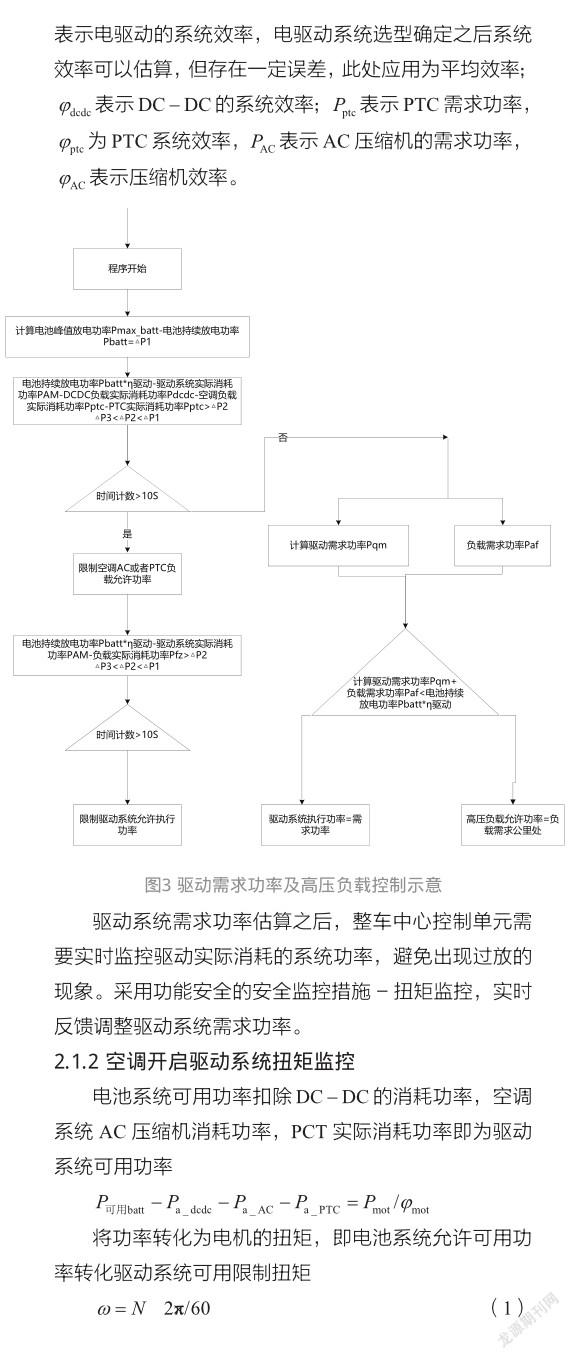
1.1.1 驅動系統需求功率的計算
此處提出了電池峰值功率與持續放電功率的概念,電池峰值功率表示可持續10 s中輸出的最大功率,可用于加速超車等動力性需求工況;驅動系統需求功率是整車中的最大功率需求,DCDC 的需求按照選型最大2 kW左右,
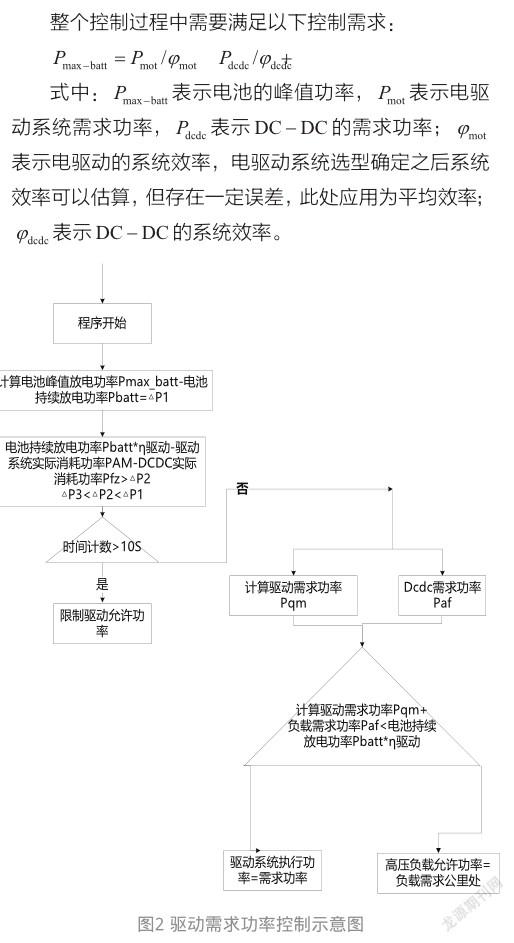
驅動系統需求功率估算之后,整車中心控制單元需要實時監控驅動實際消耗的系統功率,避免出現過放的現象,我們采用功能安全的安全監控措施-扭矩監控,實時反饋調整驅動系統需求功率。
1.1.2 驅動系統扭矩監控
3 系統仿真
以某一純電車型為例,進行系統仿真。
3.1 系統選型參數
電池系統選型,10 s峰值功率175 kW、30 s持續放電功率165 kW;
驅動系統額定功率75 kW、峰值功率150 kW;
空調系統峰值功率3.5 kW;
DCDC 功率2 kW;
PTC峰值功率5.5 kW;
3.2 整車目標:
0 → 100 km/h加速時間:8.2 s;
最高車速200 km/h
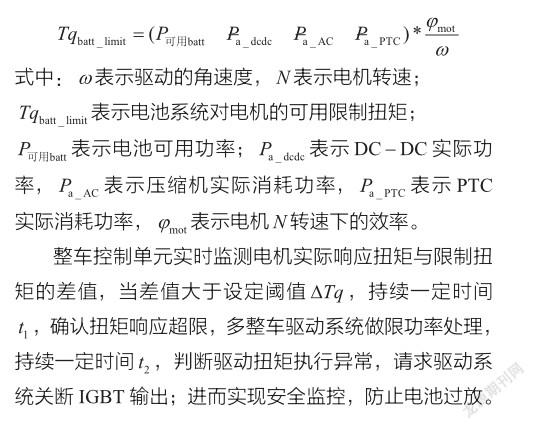
3.2.1 電量充足,整車性能目標與功率校驗
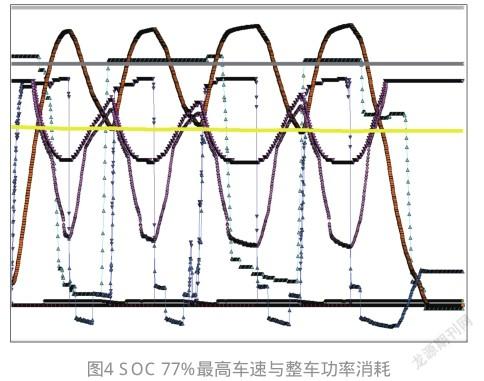
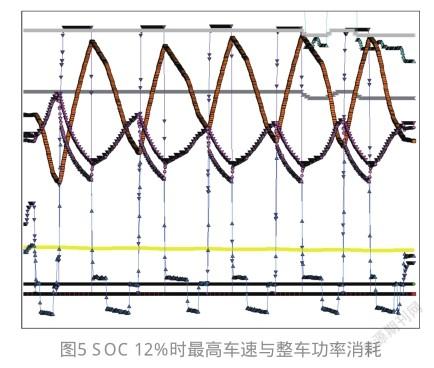
3.2.2 電量不足時整車性能目標與功率校驗
4 結束語
本文是一種新能源汽車的能量管理方案,經過仿真驗證初步達到設計目的。為了詳細驗證系統控制策略,奇瑞新能源公司試裝車輛用于測試驗證,并結合實測數據對控制策略進行修改和完善,目前車輛已經達到可量產水平,證明控制策略在實際運用中具有較強的可行性。
參考文獻:
[1] LI Y,ANG K H ,CHONG G C Y. Patents,software and hardware for PID control:an overview and analysis of the current art[J]. IEEE control Systems Magazine,2006,26(1):42-54.
[2]余志生.汽車理論[M].北京:機械工業出版社,2003.
[3]陳清泉.現代電動汽車技術[M].北京:北京理工人學出版社,2002.
[4]先進PID控制MATLAB仿真[M].北京:電子工業出版社,2011.
3295501908296
猜你喜歡
煤氣與熱力(2021年10期)2021-12-02 05:11:58
汽車維修與保養(2020年11期)2020-11-23 12:40:39
海峽姐妹(2019年8期)2019-09-03 01:01:00
汽車觀察(2019年2期)2019-03-15 06:00:48
汽車觀察(2018年12期)2018-12-26 01:05:26
汽車觀察(2018年9期)2018-10-23 05:46:42
車迷(2017年10期)2018-01-18 02:10:53
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
風能(2015年4期)2015-02-27 10:14:36
風能(2015年4期)2015-02-27 10:14:34