基于改進SSD的架空線路關鍵部件實時檢測
2021-03-23 09:39:10吳庭棟趙國偉張興忠
計算機工程與設計 2021年3期
吳庭棟,楊 罡,趙國偉,張興忠+
(1.太原理工大學 軟件學院,山西 晉中 030600;2.國網山西省電力公司電力科學研究院,山西 太原 030001;3.國網山西省電力公司大同供電公司,山西 大同 037008)
0 引 言
目前,主流的目標檢測技術主要分為兩類。第一類是以R-CNN[1]、SPPNet[2]、Fast R-CNN[3]、Faster R-CNN[4]和Mask R-CNN[5]等為代表的專注于精度的算法,精度高但實時性差。第二類是以YOLO[6]、SSD[7]、YOLO-v2[8]和YOLOv3[9]等為代表的專注于精度與實時性權衡的算法。
目標檢測技術在工業領域中的一個應用就是與無人機航拍巡檢結合。王萬國等[10]將Faster R-CNN算法用于無人機電力線巡檢圖像部件檢測,證明了基于深度學習的識別方法實現電力小部件的識別是可行的;陳慶等[11]提出了一種針對絕緣子自爆故障的識別算法,取代人工分析,降低了由人為經驗判斷可能造成的誤差;湯踴等[12]選取Faster-RCNN研究了不同網絡模型在輸電線路中對不同部件的識別準確率和識別時間;張驥等[13]提出了一種通過卷積神經網絡訓練獲取深度模型的檢測算法,以有效地識別出輸電線路外破隱患。上述研究均將重點集中于檢測精度上,并未對精度與速度的權衡進行研究,同時也并未考慮設備算力的大小,都是在算力強大的服務器端進行。在算力受限的嵌入式開發平臺上進行實時檢測的研究還處于起步階段。
本文自建架空線路關鍵部件數據集,并提出了一種多尺度并行融合檢測算法MSPF-DN,可以將此模型移植到NVIDIA Jetson AGX Xavier上,由航拍巡檢無人機攜帶,來輔助巡檢人員完成關鍵部件實時檢測,有效提升航拍巡檢的效率和智能化水平。
1 SSD算法
SSD算法是一種端到端的目標檢測算法,可以從特征提取網絡中直接回歸出物體類別和位置。將VGG16[14]的最后兩個全連接層替換為全卷積層并在其后增加4個額外的卷積層共同組成SSD算法的特征提取網絡。SSD根據網絡輸入圖像大小分為SSD300和SSD512版本,后者精度更高,但速度相較前者略低。以SSD300為例,其算法結構如圖1所示。
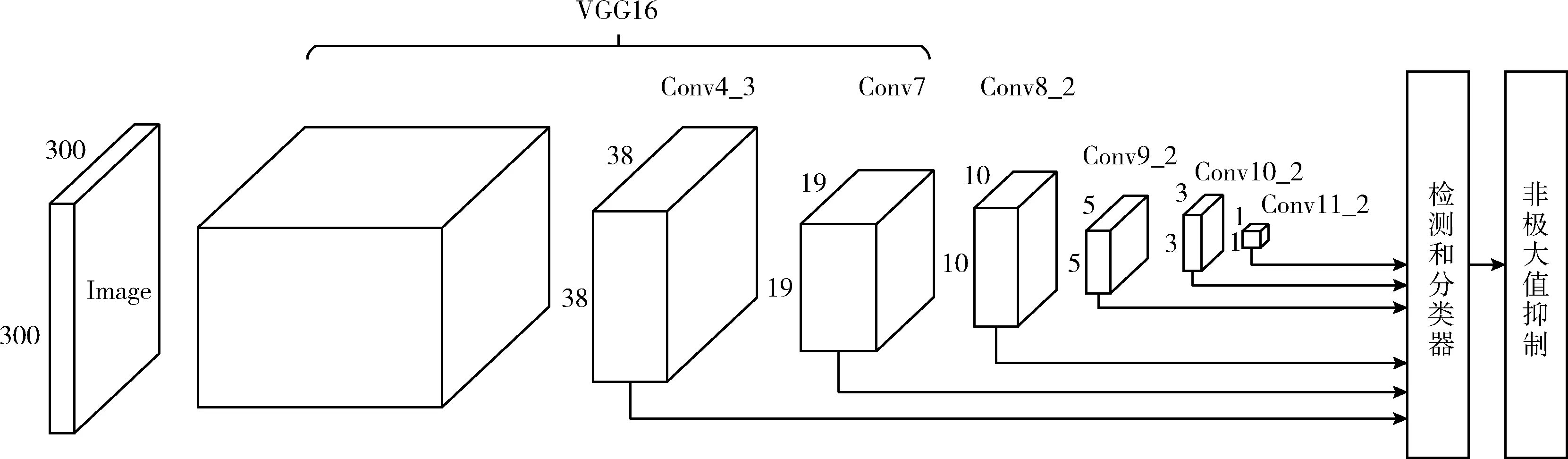
圖1 SSD算法結構
SSD算法分為兩個階段,網絡訓練階段和預測階段。在訓練階段,將候選框和真值標簽進行匹配,以此來劃分正負樣本,并根據損失函數的值對得到的負樣本進行排序,最終使正負樣本的比例保持在1∶3。在預測階段,首先得到候選框的偏移及相應目標類別的置信度,然后通過非極大值抑制算法去除多余的候選框,最后輸出物體位置信息和相應類別的置信度。
SSD同時對目標類別的位置偏移量和置性度進行回歸,故其損失函數由位置損失和分類損失兩部分共同組成,如式(1)所示
(1)
式中:N是匹配的候選框數量,x為候選框與真實框的匹配結果;c為類別置信度;α為權重項;l為預測邊框;g為真實邊框。
SSD算法在檢測精度和速度上都是表現非常優秀的卷積神經網絡,因此,本文以SSD算法為基礎,對其進行相應改進。
2 數據集
本文所使用的數據集為自建架空線路關鍵部件數據集。從國家電網提供的10 000張實際巡檢圖像中挑選出了包含絕緣子、懸垂線夾、防震錘3類關鍵部件的3822張圖像,其中3類關鍵部件如圖2所示。
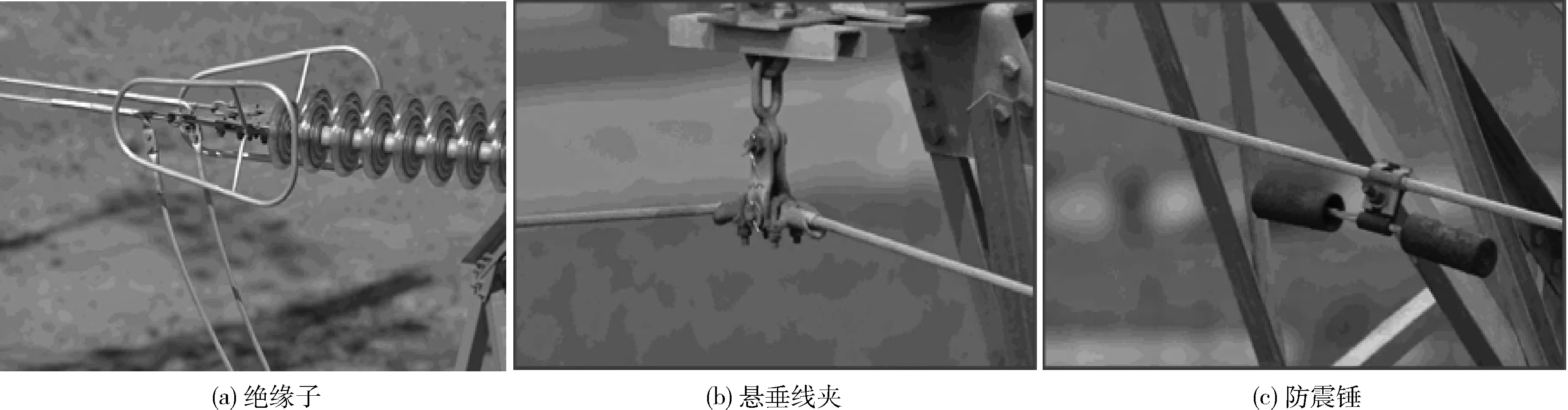
圖2 3類關鍵部件
3822張巡檢圖像的平均分辨率為4615×2936,其中每張圖像包含3類部件數不等。首先,對這些圖像中的部件類別進行編號表示,絕緣子類別以0000_1111表示,懸垂線夾類別以0102_1111表示,防震錘類別以0103_1111表示,然后按照VOC數據集的標注方式進行精準的標注工作,如圖3所示。總計標注16 763個關鍵部件,其中絕緣子6262個,懸垂線夾4754個,防震錘5747個,每類部件都相對均勻。以此圖片和標注作為本文的數據集。按 7∶2∶1 的比例將數據集劃分為訓練集、驗證集和測試集。

圖3 數據標注
與VOC數據集或COCO數據集進行比較,從部件占比來看,絕緣子較大,而懸垂線夾和防震錘較小,通過實際測量,絕緣子的寬高比范圍在0.05-17之間,懸垂線夾的寬高比范圍在0.57-3.44之間,防震錘的寬高比范圍在0.63-7.41之間。其中,各部件之間的寬高比跨度較大,在一定程度上會影響最終的識別效果。從檢測難易度來看,圖像中非部件干擾較多,鐵塔與部件相互遮擋、同類部件之間重疊、地面物體雜亂多樣等,為關鍵部件的檢測帶來不小挑戰。本文算法是針對此類架空線路關鍵部件數據集提出的,具有很強實用性及參考價值。
3 本文算法MSPF-DN
MSPF-DN算法在SSD算法的基礎上進行改進,算法結構如圖4所示。算法引入了全新激活函數h-swish[15],本算法為加快檢測的速度,設計了一個輕量級的特征提取網絡EPNets,由于本文數據集的特點,EPNets只提取到特征圖大小為10的尺度,去掉了SSD原始算法中較小的尺度;為進一步提升檢測效果,設計了一個輕量級并行結構PF-Module,并在EPNets的多個預測特征圖上使用,然后將輸出的多尺度特征圖送入檢測和分類器,最后通過非極大值抑制得到最終的檢測結果。由于架空線路關鍵部件數據集所限,EPNets只在較大的特征圖上應用PF-Module結構。

圖4 MSPF-DN算法結構
3.1 h-swish激活函數
激活函數swish定義請參見文獻[16],文中用swish激活函數替代神經網絡中常用的ReLU激活函數,以此來提升網絡的精度,如式(2)所示
(2)
雖然swish激活函數相較于ReLU提升了檢測精度,但它所帶來的精度提升與增加的計算量并不成正比,嚴重影響了速度。
為解決這種不均衡性,將swish激活函數修改為了h-swish激活函數,如式(3)
(3)
激活函數swish與h-swish的曲線如圖5所示,其中,縱坐標o(x)代表相對應的激活函數值。從圖5中可看出,h-swish和swish函數曲線基本吻合。但由式(3)可知,h-swish 比swish更易求解以及求梯度。因此可用h-swish替代swish,既提升了精度,又不過多增加計算負擔而影響速度。
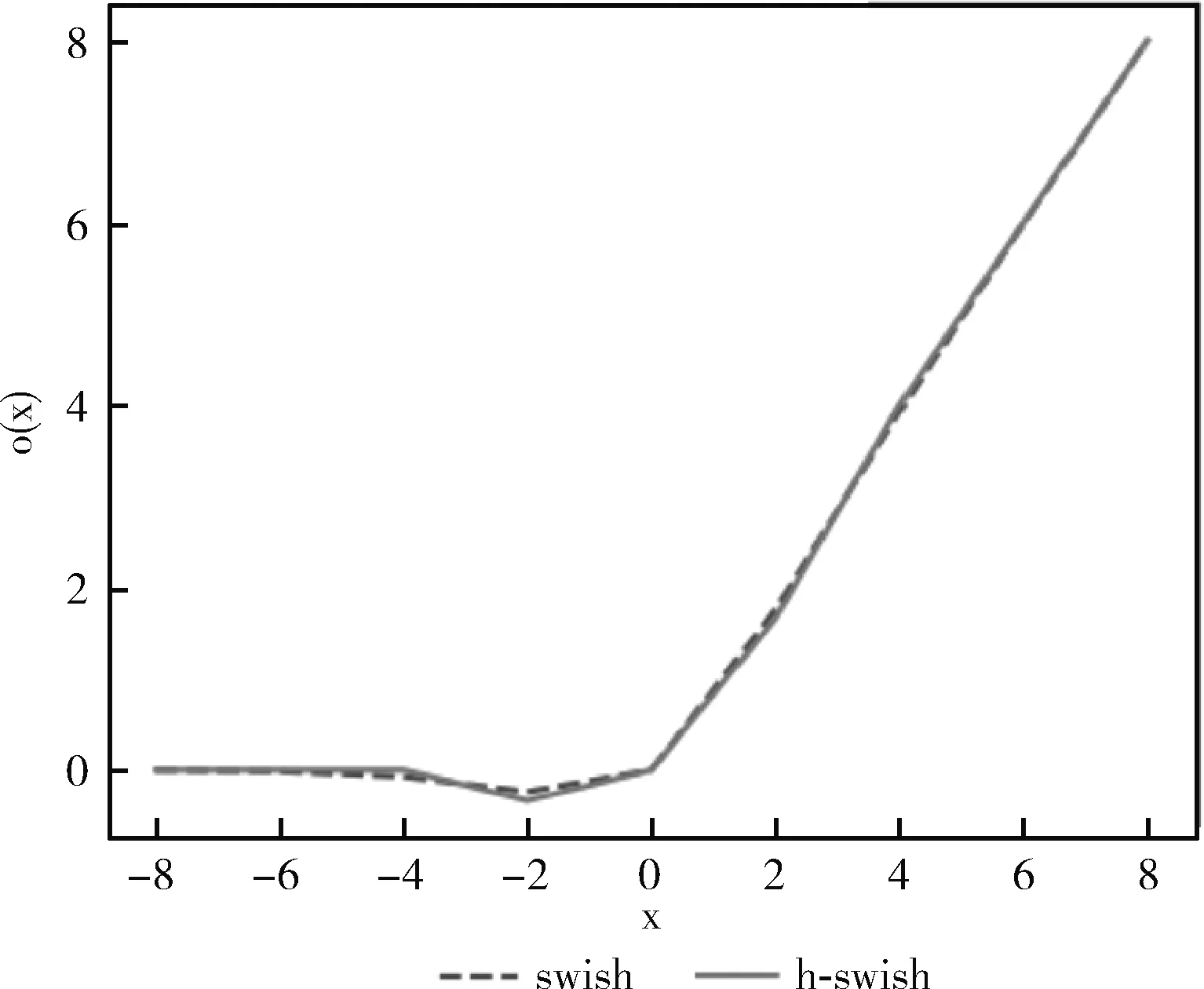
圖5 swish與h-swish函數
3.2 特征提取網絡EPNets
由于輕量化的要求,本文特征提取網絡的設計所采用的基本卷積操作為深度可分離卷積,卷積模塊結構為3×3、5×5的倒殘差塊和線性瓶頸與h-swish激活函數的組合。
3.2.1 深度可分離卷積
深度可分離卷積[17]是輕量級網絡的主要結構,相較于標準卷積其大幅度縮減了網絡參數,使卷積操作變得更快。假設輸入特征圖大小為DF×DF×M,卷積核大小為Dk×Dk×M×N,那么標準卷積T和深度可分離卷積K的參數量如式(4)、式(5)所示
T=Dk×Dk×M×N×DF×DF
(4)
K=Dk×Dk×M×DF×DF+M×N×DF×DF
(5)
其中,DF是輸入特征圖的長寬,M是輸入特征圖的通道數,Dk是卷積核的長寬,N是卷積核的個數。
由此,深度可分離卷積與標準卷積的參數量比例可由式(6)表示
(6)
由式(6)可知,深度可分離卷積與標準卷積相比,參數量大大減少。
標準卷積同時考慮了通道和區域,使用與輸入數據通道相同的若干個卷積核,對其進行卷積運算。深度可分離卷積則將通道與區域分離,先只考慮區域,然后再考慮通道,首先對輸入數據的每個通道使用單通道的卷積核進行卷積,然后將卷積后的結果作為輸入數據,使用多個與其通道相同的1×1卷積核對輸入數據進行組合,生成新的結果。深度可分離卷積如圖6所示。
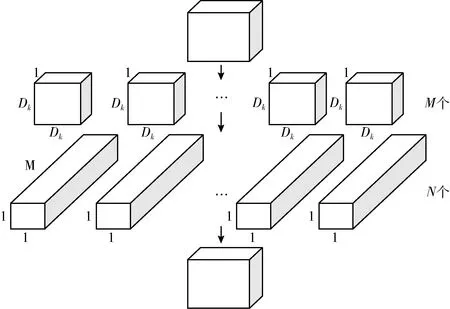
圖6 深度可分離卷積
3.2.2 倒殘差塊和線性瓶頸
倒殘差塊[18]對ResNet[19]中的殘差塊進行了改進。ResNet中殘差塊的過程如圖7所示,首先輸入數據經過一個1×1卷積0.25倍降維操作,然后使用3×3的標準卷積對上一步的結果進行卷積操作,最后使用1×1卷積0.25倍升維,一降一升,保持了前后維度的統一。倒殘差塊的過程如圖8所示,首先輸入數據經過一個1×1卷積6倍升維操作,然后使用3×3的深度可分離卷積對上一步的結果進行卷積操作,相比使用標準卷積,此操作使參數量大大降低,最后使用1×1卷積6倍降維。

圖7 標準殘差塊

圖8 倒殘差塊
在特征提取中,雖然使用深度可分離卷積可減少參數量,但它的使用也會損失一部分特征,這就降低了網絡對特征的提取能力。因此,通過在網絡中使用先升維后降維的倒殘差塊,先將輸入數據變換到高維度后再使用深度可分離卷積,以此來減少特征損失,進而提高網絡的表達能力。
激活函數通常是非線性的,在高維空間使用可以有效增加非線性,而在低維空間使用則會破壞非線性。圖8中,在深度可分離卷積后使用了1×1卷積用于降維,如果繼續使用非線性激活函數會破壞非線性,因此,線性瓶頸[18]要求必須將其后的非線性激活函數改為線性激活函數,以此來保持非線性。
3.2.3 網絡結構
本文網絡EPNets參考MobilenetV2網絡進行改進。網絡在倒殘差塊的使用上采用以下組合:3×3的倒殘差塊與ReLU激活函數組合、5×5的倒殘差塊與h-swish激活函數組合。分別如圖9和圖10所示。網絡中的標準卷積之后一律使用h-swish激活函數。

圖9 3×3的倒殘差塊與ReLU激活函數組合

圖10 5×5的倒殘差塊與h-swish激活函數組合
EPNets的網絡結構見表1,其中Conv2d是標準卷積,Inverted Residual表示倒殘差塊(均采用6倍擴張系數),HS表示h-swish激活函數,RE表示ReLU激活函數。

表1 EPNets網絡結構
3.3 輕量級并行結構PF-Module
特征提取網絡EPNets對特征進行了初步的提取,為進一步充分提取特征,本文引入了輕量級并行結構PF-Mo-dule,如圖11所示。PF-Module首先將輸入特征圖分別輸入到兩條支路中,其中一條支路采用3×3的深度可分離卷積與ReLU激活函數的組合;另一條路采用5×5的深度可分離卷積和h-swish激活函數的組合。將得到的結果進行相加融合,然后使用3×3的標準卷積與h-swish激活函數的組合,進行冗余信息過濾,形成一個新的特征圖。其中,輸入與輸出的特征圖大小相同。通過并行提取特征,增加了特征的多樣性和魯棒性,提高了網絡的精度。
假設PF-Module結構輸入特征圖大小為N×N×C,則兩條支路融合后的特征圖大小N×N×2C,輸出特征圖大小為N×N×128。
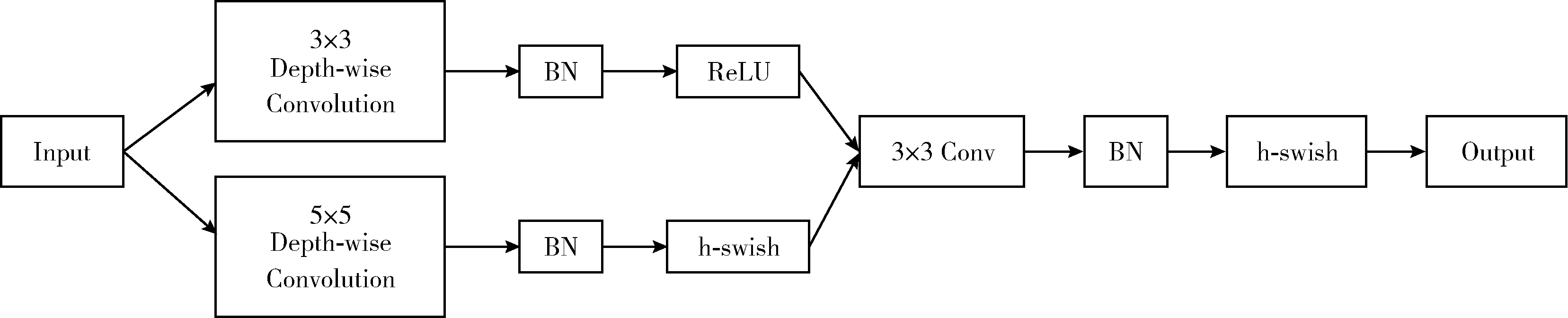
圖11 PF-Module結構
本文共選取5個特征圖用于檢測,分別是:在EPNets網絡中layer7、layer14和layer18層的輸出特征圖上應用PF-Module結構后的3個輸出特征圖;layer18層的輸出特征圖在PF-Module結構中兩條支路的輸出特征圖。
4 實驗與分析
4.1 實驗準備
實驗操作系統為ubuntu 16.04 LTS,深度學習框架為TensorFlow,接口語言為Python,CPU為Intel?CoreTM i9-9900K 3.60 GHz×16,內存為16 G,GPU為GeForce RTX 2080 Ti。移動端嵌入式平臺為NVIDIA?Jetson AGX XavierTM,內存為16 G。
本文所使用的數據集在第2節已有介紹,由于自建數據集的數據量不足,為得到更好的實驗結果,需要在大型數據集COCO上進行預訓練,COCO數據集包含91類目標,328 000圖像和2 500 000個label。
4.2 評價標準
目標檢測算法的評價標準有很多,本文選取檢測精度、檢測速度和模型大小來對MSPF-DN算法進行評估。AP(average precision)用于評估算法在各個類別上的精度,mAP(mean average precision)用于評估算法在所有類別的精度,是各類別AP的一個均值,FPS(frames per second)用于評估算法檢測速度,代表每秒檢測幀數,MB(MByte)用于評估模型的內存大小。通過權衡這幾項性能指標,得到適用于嵌入式平臺運行的輕量級模型。
4.3 算法訓練
MSPF-DN算法的訓練過程分為兩階段,第一階段是使用COCO數據集預訓練的過程,第二階段是使用自建數據集進行適應性訓練的過程。為解決樣本失衡的問題,兩階段的訓練過程中,使用的損失函數是Focal Loss[20]置性度損失和Smooth L1[4]位置損失相結合的總體目標損失函數,通過改變樣本分布,有效提高了網絡輸入樣本的質量。
在具體的訓練方式上,第一階段批處理大小為64,使用0.9的動量優化器,其中學習率的衰減方式為余弦衰減[21],采用warmup[22]預熱學習率的方式,前2k次迭代使用0.013 333的小學習率進行初始化學習,接下來的迭代在0.04的大學習率初始化下進行衰減學習,總共迭代25k次,這樣的方式有助于模型更快收斂,且效果更佳。
在第二階段,加載第一階段得到的預訓練模型,訓練過程與第一階段相同,但迭代次數低于預訓練的迭代次數,共迭代10k。其中前2k次迭代使用0.013 333的初始化學習率,剩余的8k次迭代使用0.04的初始化學習率。
4.4 實驗結果與分析
(1)本節實驗是在自建工業數據集上對MSPF-DN算法進行訓練和評估,在主流SSD算法下,使用不同的基礎網絡進行實驗,輸入圖像尺寸為300×300,以此作為評判基準。
實驗結果見表2,表中“速度”是在移動端嵌入式平臺測出的實時速度。對比基準實驗,本文MSPF-DN算法可以有效提升檢測精度,與基準實驗對比,分別提高了6.31%和4.4%;該算法也加快了檢測速度,比基準網絡中最快的高2 FPS;同時該算法有效減少了網絡模型的參數,與基準網絡對比,分別減少7.6 MB和4.1 MB。
(2)本節實驗通過不同尺度的網絡輸入對MSPF-DN算法進行訓練,并對比了不同尺度下的AP、mAP、FPS和模型大小。
實驗結果見表3,不同尺度的網絡輸入不會改變模型大小,但隨著尺度的增加,輸入圖像中各個目標的尺寸會相應增大,使網絡計算復雜度相應的增加,推理過程耗費的資源增多,因此,增大輸入尺度雖然可以有效提高網絡檢測精度,但會帶來檢測速度下降,在實際的應用中還需要根據需求來進行權衡。
圖12~圖14分別展示出了不同尺度輸入下分類損失、位置損失及學習率的變化曲線。
MSPF-DN640的檢測精度是最優秀的,這里為了更精準的對比,在圖15中列出了MSPF-DN300與MobileNetv2_SSD在相同圖像上的檢測結果。圖中第一行是MSPF-DN300的檢測結果,第二行是MobileNetv2_SSD的檢測結果。觀察發現,MSPF-DN300在復雜背景下和遮擋下的檢測性能比MobileNetv2_SSD更優秀。

表2 不同基礎網絡和結構的實驗結果

表3 不同輸入尺度的MSPF-DN實驗結果
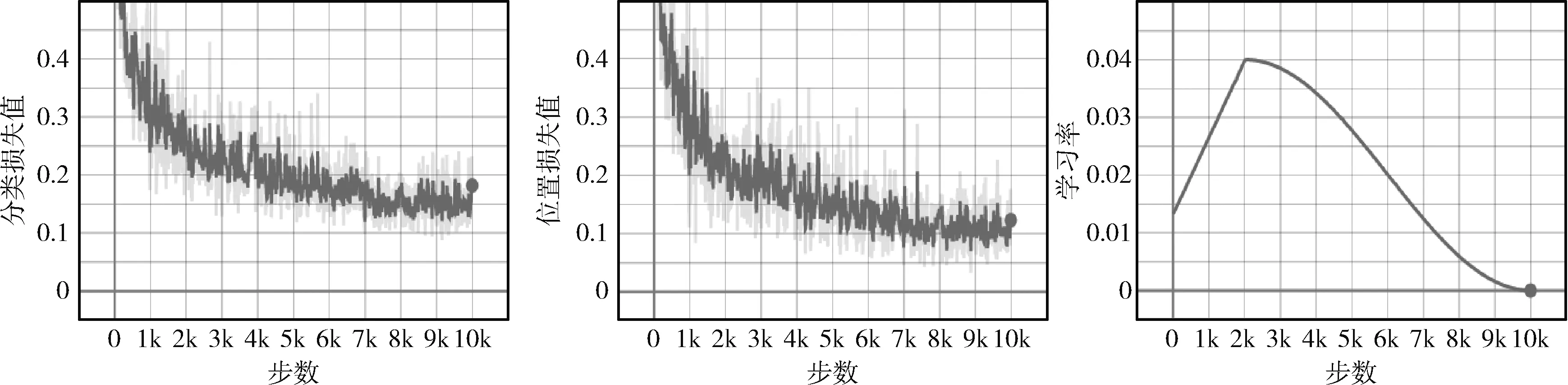
圖12 MSPF-DN300的損失及學習率變化曲線
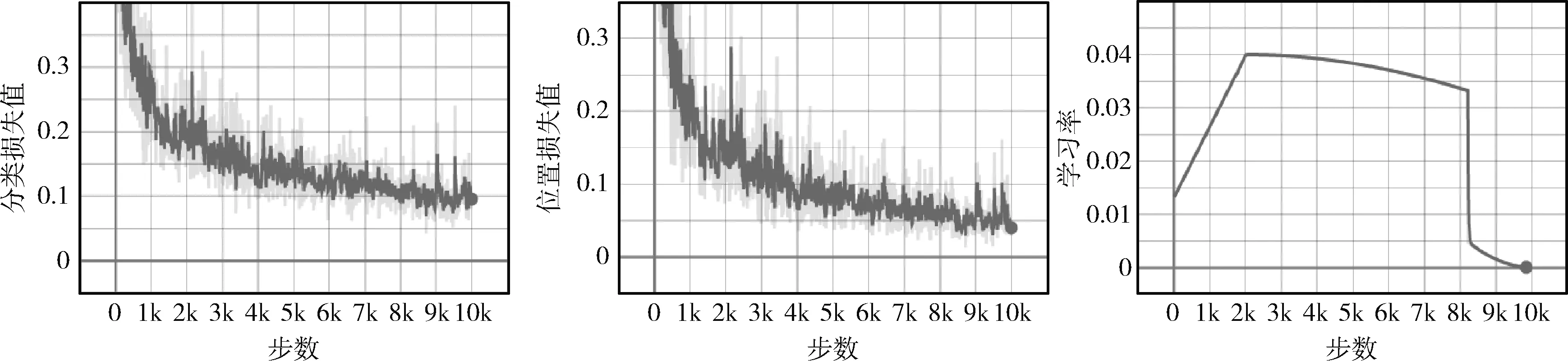
圖13 MSPF-DN512的損失及學習率變化曲線

圖14 MSPF-DN640的損失及學習率變化曲線
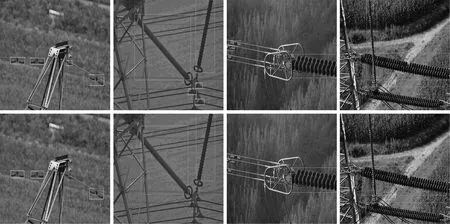
圖15 MSPF-DN300與MobileNetv2_SSD檢測效果
5 結束語
本文針對航拍智能巡檢場景,提出了一種多尺度并行融合實時檢測算法MSPF-DN,該算法以SSD算法為基本框架,使用不同倒殘差塊與不同激活函數組合的結構,設計了更高效的特征提取網絡EPNets。同時為進一步提高網絡的精度,設計了輕量級并行結構PF-Module,并應用于特征提取網絡EPNets的多個特征圖上。最后,將PF-Module 結構輸出的特征圖共同用于檢測。本算法針對架空線路關鍵部件,在嵌入式NVIDIA Jetson AGX Xavier設備上實現了實時且高精度的檢測。下一步將增加關鍵部件類型及數據量,進一步改進網絡,來提高該算法對大多數關鍵部件的檢測能力。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
