自由面對潛艇尾流場流動特性影響研究1)
2021-03-24 06:13:32郭春雨徐鵬韓陽王超郭欣雨鄶云飛
力學學報 2021年1期
關鍵詞:模型
郭春雨 徐鵬 韓陽,2) 王超 郭欣雨 鄶云飛
?(哈爾濱工程大學船舶工程學院,哈爾濱 150001)
?(水下測控技術重點實驗室,大連 116013)
引言
潛艇的隱身性能不僅是保障完成其作戰使命的基本性能,更有助于潛艇在海戰中更好地發揮其強大的突襲能力.隨著如今作戰任務多樣性的提升,潛艇不可避免地會涉及到近自由面航行,艇體的分離渦與自由面相互作用,致使渦結構會在原有結構基礎上產生位置偏移,進一步加劇流場的復雜程度,這對潛艇的隱身性能來說是一項更大的挑戰.由于戰略戰術的需求,有關潛艇近水面航行的研究逐漸受到重視.近年來隨著水動力學研究的深入,越來越多的科研人員通過流場流動細節來尋找影響宏觀力及噪聲的本質原因.對于精細流場的獲取主要有兩種途徑:試驗測試與數值模擬.其中數值模擬由于成本較低且能獲取全場流動信息而受到廣泛應用,但其可信程度稍低,往往需要試驗數據加以驗證.隨著流場測試技術的不斷發展,粒子圖像測速(particle image velocimetry,PIV)因其無接觸、全局、瞬態測量等優點,迅速成為研究者的利器[1-4].
國內外公開發表的運用PIV 技術測量潛艇繞流場的文章很少.Ashok 等[5-6]對SUBOFF 標模進行了系列試驗并進行了分析.Fureby 等[7]對直航和10?斜航角狀態下的潛艇流場進行測量,并與數值模擬結果進行對比,兩者吻合良好.Lee 等[8]通過SPIV 技術測量了潛艇10?斜航角狀態下指揮臺圍殼分離渦情況.Wang 等[9]研究了自由面的存在對螺旋槳尾流的影響,并與CFD 計算結果相互驗證.在國內,張軍等[10-11]利用隨車式PIV 系統測量了不同主體與附體連接形式的水下航行體尾部流場.張國平等[12]應用隨車式2D-3C 水下PIV 測量系統進行了SUBOFF潛艇流場測試,然而并未公開相關測試結果.薛慶雨等[13-15]在空泡水筒中測量了SUBOFF 模型直航、10?攻角、尾附體10?舵角等三種工況下槳盤面流場湍流強度和湍流積分長度.海軍工程大學張文照等[16]對潛艇模型的尾流速度場進行測量,得到潛艇模型的尾流渦量場分布,為研究潛艇水動力噪聲與尾流渦結構之間的關系提供了參考.
由于流場測量困難,鮮有考慮自由面對潛艇尾流場流動特性影響的試驗研究,大都采用數值模擬的方法探究艇體與自由面相互作用的影響.Dawson[17]是詳細開展潛艇近自由面航行數值模擬較早的研究者之一.Shariati 等[18-19]應用RANS 方法對SUBOFF 模型多種工況、航速、潛深做了詳細研究.近期,Amiri等[20-22]對自由面如何影響潛艇水動力性能進行了系列研究.2019 年Carrica 等[23]考慮靜水環境及波浪環境對Joubert BB2 潛艇近自由面自航的水動力性能進行了研究.Tian 等[24]研究了不同波浪作用以及不同潛深對水下航行器水動力的影響.在國內,張楠等[25-28]開展了大量關于潛艇近水面航行數值模擬研究,奠定了國內自由面對潛艇尾流影響數值研究的基礎.隨后,逐漸受到各科研高校的關注,涌現出大批有關自由面對潛艇尾流影響的論文[29-34].
采用精細流場測量技術對潛艇繞流場的試驗研究很少,有關自由面對潛艇尾流場流動特性影響的研究更是少之又少.本文依托哈爾濱工程大學船模水池實驗室,采用先進的水下三維粒子圖像測速(stereoscopic particle image velocimetry,SPIV) 系統測量潛艇尾流場微觀結構,輔以數值模擬技術觀測近自由面航行時表面波系,以此來研究SUBOFF 潛艇無限潛深與近水面航行時尾流場特性,通過試驗與數值模擬結果相互驗證、補充,得到潛艇尾流場流動特征以及隨航速與潛深變化的規律,以期為未來潛艇設計提供依據.
1 試驗方案
1.1 試驗設備與試驗模型選取
1.1.1 試驗設備
本文依托哈爾濱工程大學船模拖曳水池開展SUBOFF 模型尾流場SPIV 試驗,基本實驗設備如下.
(1)拖曳水池:長度108 m;寬度7 m;水深3.5 m.
(2) 拖車:車速V≤6.5 m/s;穩速范圍:0.1~6.5 m/s;精度:0.1%;通過自主設計并制作的固定裝置將試驗模型固定在拖車上,固定方式采用艇尾固定.
(3)水下粒子圖像測速系統:2D-3C SPIV 系統.
1.1.2 模型選取
本試驗選用的模型是美國泰勒水池(David Taylor Model Basin,DTMB) 設計的SUBOFF 模型,該模型具有大量的試驗結果進行驗證,因此比較適合做相關研究.由于水池深度及PIV 測試能力的限制,模型長度選為1 m,模型如圖1 所示,其主要參數如表1所示.
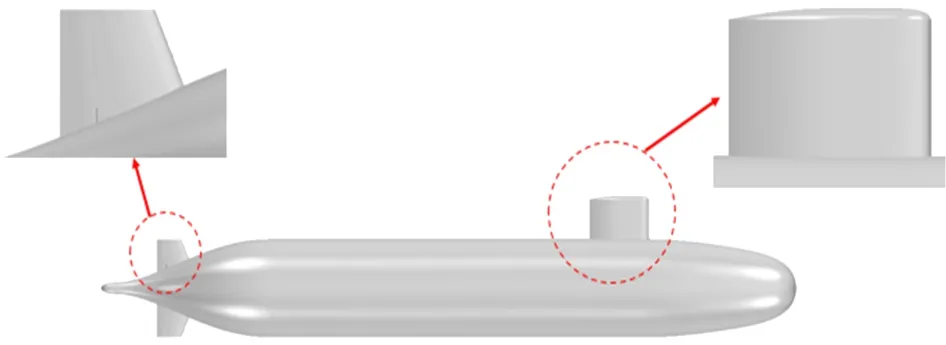
圖1 SUBOFF 模型圖Fig.1 SUBOFF model
試驗所用模型由聚乳酸(PLA) 材料經3D 打印技術制作而成.聚乳酸密度為1.20~1.30 kg/L,彈性模量為3000~4000 MPa,拉伸強度為40~60 MPa.由于打印機工作區域限制,整個艇體分三段打印,最后拼接而成.首先將艇體表面打磨光順并噴涂防水涂層,然后對艇體表面進行亞光黑處理,最后對測量截面附近進行噴涂吸光材料,避免試驗過程中激光強反光影響.由于本次試驗采用的潛艇模型縮尺比較小,故在艇體首部L/20 處加裝激流裝置以加快艇體表面的層流轉淚.經3D 打印的實物模型以及噴涂效果如圖2 所示.
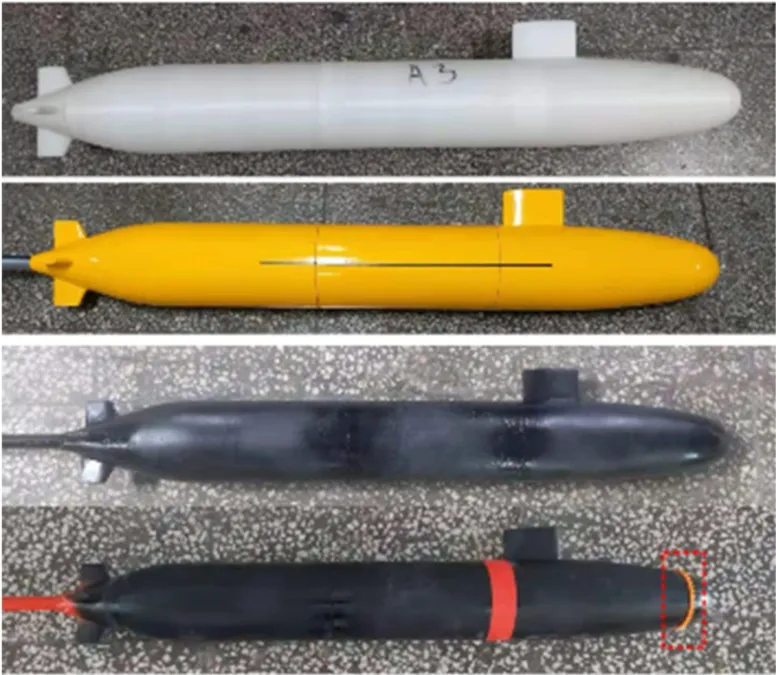
圖2 SUBOFF 實物模型Fig.2 SUBOFF solid model
1.2 試驗工況的確定
為分析自由面對潛艇尾流場的影響,進行三個潛深、多個航速下的潛艇尾流場測量.由文獻[17]可知,潛深在3.3 倍最大直徑D以上時可以忽略自由面的影響;同時由另一文獻[35]可知,除了自由面影響外,池底壁面也存在影響,要完全避免限制水域的干擾需要水下航行體距池底的距離不宜小于1/2 倍艇長.因此本次試驗選取4D潛深作為無限潛深工況,此時可以忽略自由面和池底的影響.同時,在潛艇靠近自由面時存在自由液面反光干擾,為減小反光現象,選取1.5D潛深作為近自由面工況,選取2.5D潛深作為中間工況.試驗航速選取為Fr=0.3~0.7,傅汝德數Fr定義如下
式中,U為拖曳航速,L為潛艇的特征長度.
測量截面取為槳盤面處,模型參數及試驗工況如表1 所示.
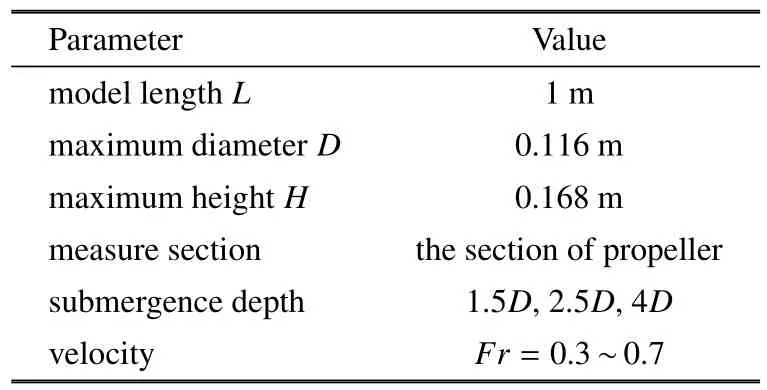
表1 模型參數及試驗工況Table 1 Model parameters and test conditions
1.3 數值模型與網格劃分
采用基于有限體積法的STAR-CCM+商業軟件進行潛艇流場數值模擬,應用隱式非定常時間推進格式進行非穩態求解,湍流模型選取分離渦模型(DES),時間步長的選取則充分考慮CFL~1 的條件,綜合網格空間尺度及時間尺度,最終選為0.001 s.由于涉及到近自由面航行,自由表面采用兩相體積VOF 方法建模.控制方程采用基于壓力的耦合求解,其中對流項采用二階迎風格式進行空間離散,耗散項采用二階中心差分格式進行離散.計算時長為定為2 s.
計算域如圖3 所示,具體設定如下:速度入口邊界距艇首2 倍艇長L,壓力出口距艇尾4 倍艇長L,其余邊界設為壁面邊界條件,距艇中心10 倍艇徑D.
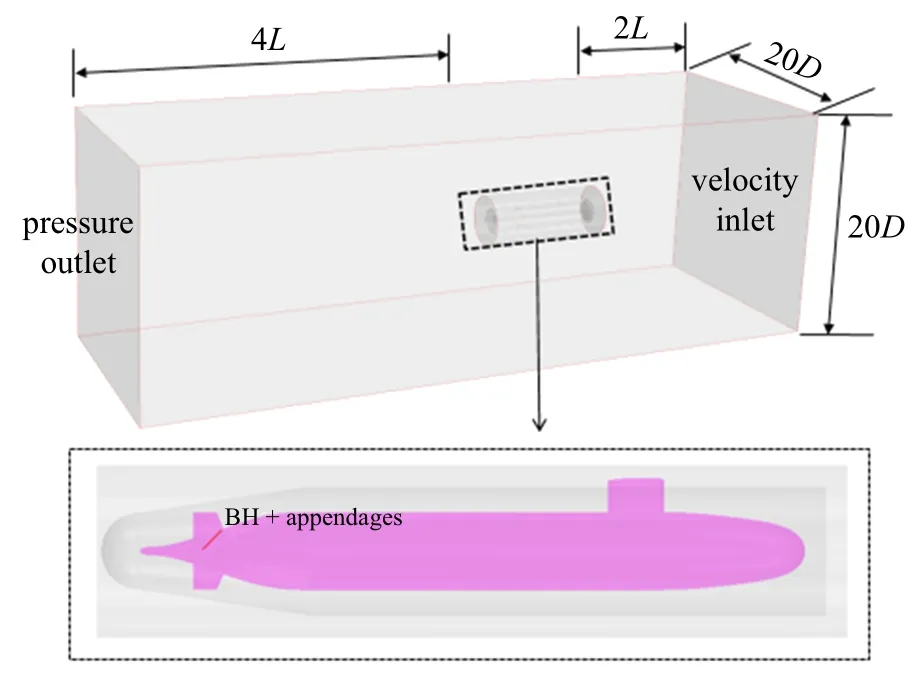
圖3 計算域示意圖Fig.3 The calculation domain schematic
網格劃分采用軟件中自帶的切割體網格形式,在艇體周圍進行三層局部加密,在主附體交接部分及分離渦發展區域(指揮臺圍殼后端及十字舵后端)進行局部加密,對潛艇近水面航行時的自由表面和開爾文波形等物理現象也進行加密.邊界層網格劃分則采用棱柱層網格形式,并采用Ally+壁面處理,同時根據不同航速進行棱柱層厚度調整,保證y+值處于1 左右范圍內.根據不同航速下的興波程度有針對性地加密自由表面及開爾文波形,最終將網格數控制在1000 萬左右,艇體周圍各加密區細節如圖4 所示.
2 潛艇尾流場測量試驗
2.1 水下SPIV 測量系統

圖4 艇體周圍加密區示意圖Fig.4 The mesh refinement area
本試驗所采用的流場測量設備為DANTEC 公司為哈爾濱工程大學船模拖曳水池定制的隨車式水下SPIV 系統,布置于拖車右側,SPIV 系統規格參數如下:CCD 相機分辨率為2048×2048 像素;雙脈沖Nd-YAG 激光器,最大脈沖頻率為15 Hz;最大脈沖激光能量為1200 mJ;常規工作能量為200 mJ;激光束持續時長為4 ns;激光波長為532 nm;脈沖激光片厚度為0.6 mm;最大測量范圍為400 mm×400 mm;示蹤粒子為聚酰胺顆粒.
該套系統包括一個浸沒水中的雷體、兩個翼型支架、脈沖式激光器、同步器、圖像采集裝置、粒子播撒裝置等.雷體包含相機及眾多反射鏡和柱面鏡結構,其內部詳細光學結構布置如圖5 所示.雷體內的兩臺相機為Dantec 公司的FlowSense 4M MKII 12位精度相機組,其使用高性能的逐行掃描行間CCD芯片,相機的分辨率為2048×2048 像素并且具有相同數目的存儲單元.兩臺相機的鏡頭參數各不相同,靠近前端的Camera1 鏡頭為50 mm f/1.8 的佳能鏡頭,靠近后端的Camera2 鏡頭為85 mm f/1.8 的佳能鏡頭.支柱1 中包含激光導光臂,支柱2 中包含相機線纜支柱結構.
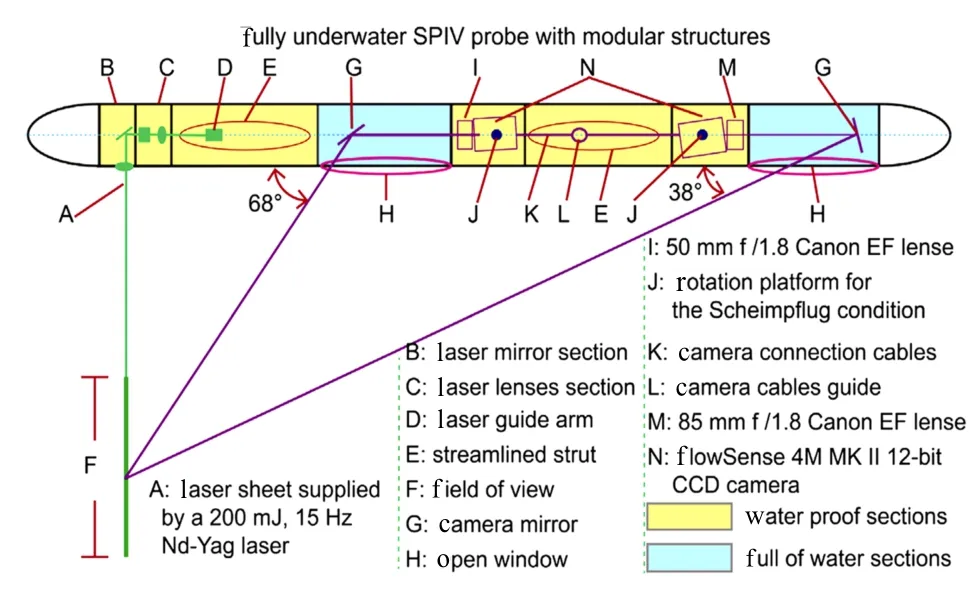
圖5 SPIV 系統中各元器件詳細布置圖[36]Fig.5 Detailed arrangement of the probes in the underwater SPIV system[36]
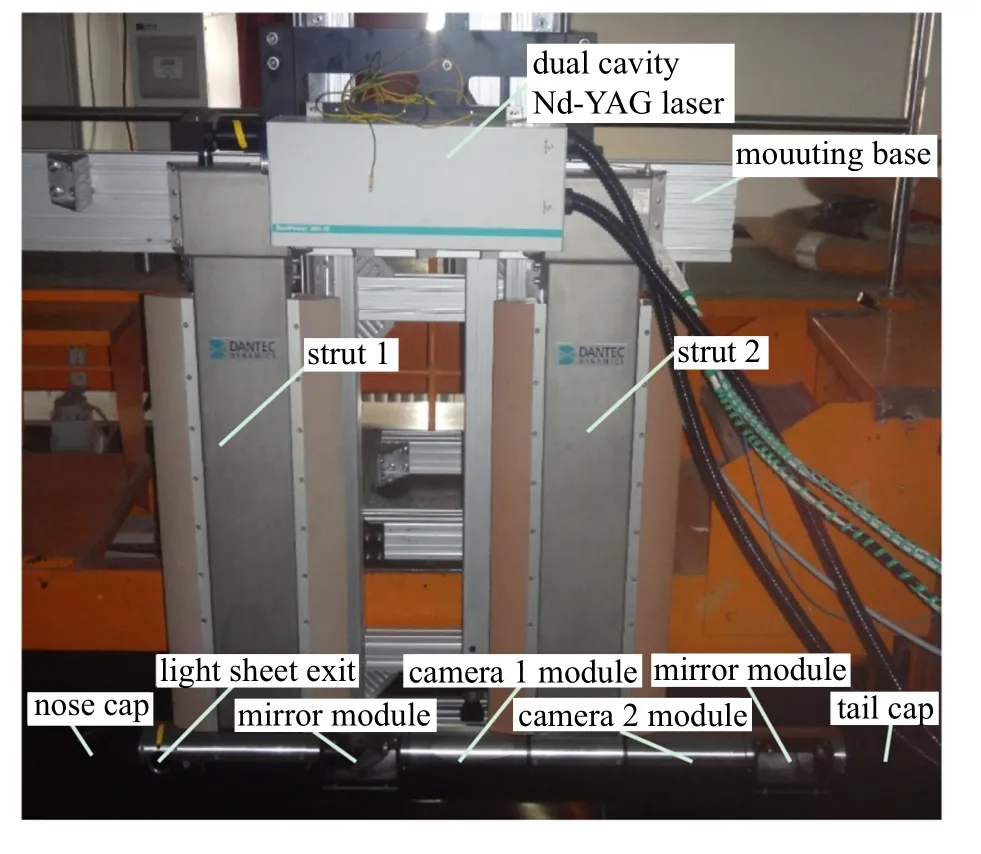
圖6 SPIV 系統實物圖Fig.6 Stereoscopic particle image velocimetry system
2.2 流場數據采集、測量與分析
采用平均直徑為50μm 聚酰胺顆粒(PSP-50)作為示蹤粒子,密度為1.03 g/cm3,具有良好的跟隨性.由于拖曳水池尺度較大,如何在拖曳水池進行大范圍粒子均勻播撒是一項技術挑戰,本試驗應用一套自主設計的粒子播撒裝置進行示蹤粒子播撒,播撒裝置如圖7 所示.裝置上方裝有攪拌電機的水箱可以存儲大量的水并均勻攪拌粒子,打開水箱下方的閥門后,粒子沿下方不同管道播撒到水池中,下方每條管道都開有若干小孔,其潛深可以在水下50 cm 范圍內自由調節,完全符合潛艇的潛深要求,在不同深度下均能保證潛艇模型周圍存在適量粒子.每航次試驗結束后進行示蹤粒子補充,通過相機觀測窗口進行粒子濃度判別,保證每次測量過程中平均粒子濃度約為150 g/m3即每個查問區域具有15~30 個粒子,這樣能夠增大互相關分析的精確度.
在試驗過程中,脈沖激光照亮待測區域示蹤粒子,相機雙幀拍攝,采集頻率調至最大采樣頻率7.5 Hz,根據不同航速,調整激光(相機)在相鄰兩幀之間的時間間隔,以保證在此間隔內粒子最大位移不超過查詢區域的1/4,每次測量采集的圖片數控制在150~200 對之間以滿足數據收斂性的要求.試驗過程如圖8 所示.
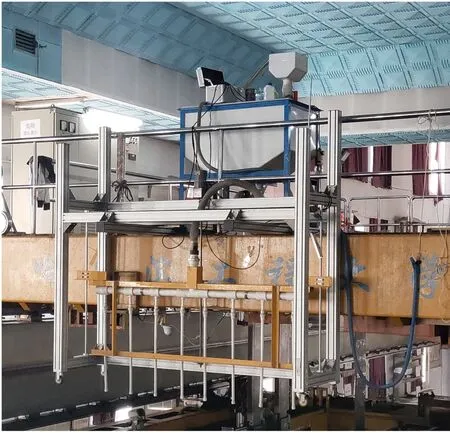
圖7 粒子播撒裝置Fig.7 The particle seeding device
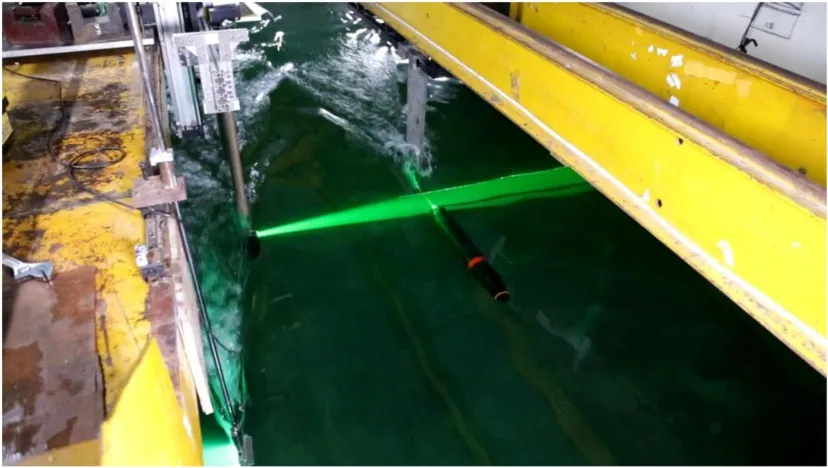
圖8 工作中的SPIV 系統Fig.8 The SIV system in operation
采用Dantec Studio 6.2 軟件對試驗圖片進行批量處理與后續分析.自適應互相關算法獲得流場矢量信息,查詢區域大小設置為64×64 像素,32×32 像素,16×16 像素,重疊率為50%.鄰域驗證設置為5×5 矩陣,通過比較矩陣內的向量并啟用替換,可以有效過濾掉偽向量并用鄰域向量的中值進行插值.通過實時監測迭代步數對結果收斂性的影響,迭代次數選擇為10,檢測最少有效粒子數設置為10,最終得到的相鄰速度矢量間距為2.45 mm.
吳鐵成[36]應用該SPIV 系統在拖曳水池中進行了大量船舶艉流場試驗,對該系統不確定度進行分析,并對KCS 標模多工況下伴流場進行測量,與公開數據進行對比,驗證了該系統的準確性.
3 模型試驗準確性驗證
應用泰勒水池的SUBOFF 實驗數據作為參照,對本次模型試驗及數值計算進行驗證.由于測試水池以及PIV 測試能力的限制,模型縮尺比略有不同,兩者主尺度參數見表2.測量航速由Fr相似換算得到,由于此時浸深較大,自由面影響較小,使用Fr相似來確定本試驗航速不夠嚴謹.受試驗條件中模型長度及拖曳航速的限制,在今后的試驗研究中應盡量滿足雷諾數相似條件,使用更大的模型及航速.

表2 模型差異Table 2 Model differences
提取0.6R圓周范圍內若干點上的潛艇槳盤面軸向伴流速度與標準實驗值進行對比.取點原則為周向間隔5?取一個點,在0?,90?,180?的±10?鄰域內角度間隔加密為2?.其中,周向角0?規定指向艇體正上方(十二點鐘位置),從艇艉前視,順時針旋轉為正方向.最終,軸向速度使用u/U作無量綱化表示,其中U為拖曳航速.軸向速度對比結果如圖9 所示.槳盤面上方速度值徑向分布如圖10 所示.
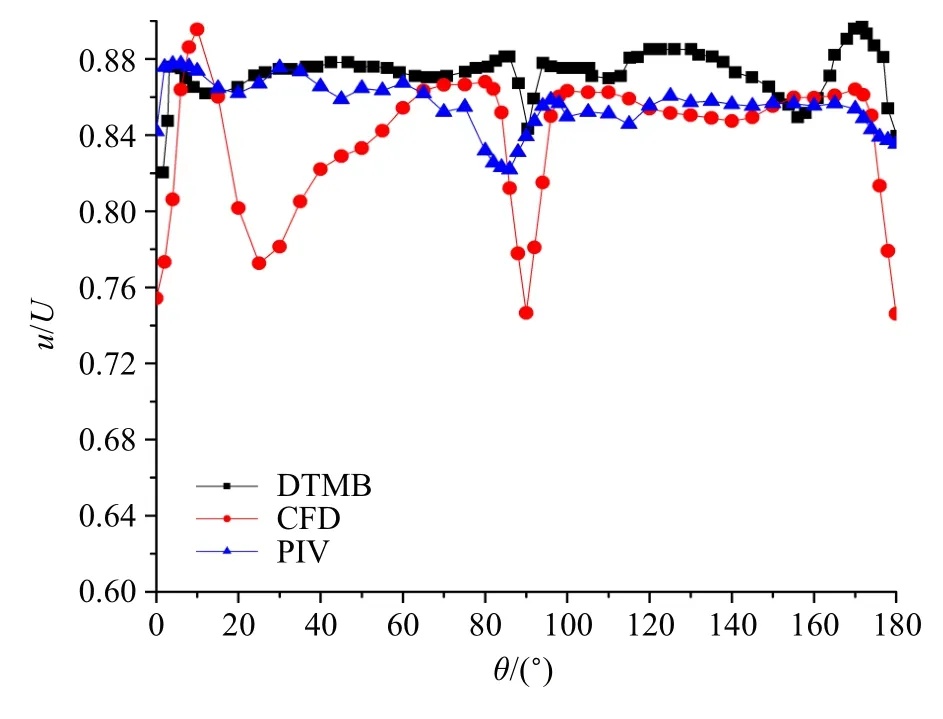
圖9 槳盤面0.6R 處無量綱軸向速度值對比圖Fig.9 Comparison diagram of dimensionless axial velocity value at 0.6R of propeller disk
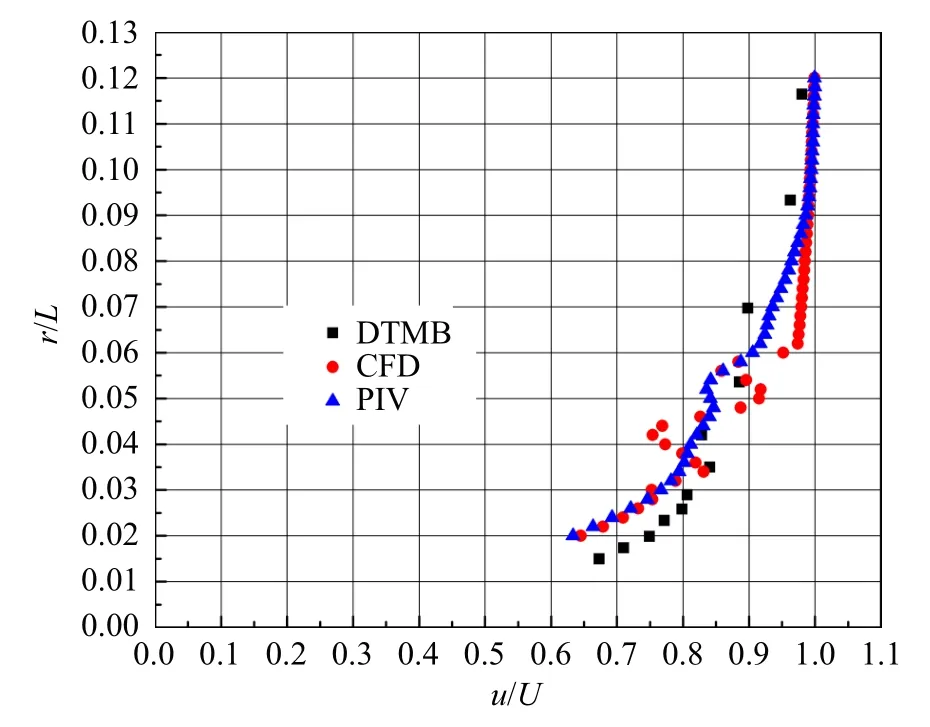
圖10 槳盤面上方速度徑向分布圖Fig.10 Radial velocity distribution above the propeller disk
PIV 試驗得到的軸向速度值普遍小于泰勒水池實驗值,將其歸結于模型大小引起的尺度效應.本試驗采用的潛艇模型尺度較小,因此相同Fr下的Re較小,導致邊界層稍厚,測量得到的速度要小一些.以泰勒水池的實驗值作為參照計算本試驗測量的誤差值,最大誤差在5%以內.對比發現CFD 計算的軸向速度值偏小,其原因為大部分網格位于自由液面區域,艇體周圍網格只能達到四五百萬量級,另外模型太小,模型本身產生的流場特征也較小,經過一些耗散實際測量到的量就會小很多,而數值模擬條件比較理想化,模擬出與試驗環境相同的真實物理環境還存在差異,即CFD 結果過高估計了馬蹄渦的強度,使得馬蹄渦的影響區域增大,造成了槳盤面處偏低的軸向速度.通過以上流場對比結果來看,本次試驗和數值計算結果與泰勒水池標準實驗結果吻合良好,因此本試驗結果能夠應用于后續的研究.
4 試驗結果分析
4.1 不同潛深下螺旋槳盤面速度場分析
圖11 給出Fr=0.3~0.7 范圍內不同潛深工況下槳盤面軸向速度場,左為1.5D潛深結果,中間為2.5D潛深結果,右為4D潛深結果.其中空白區域對應槳軸遮擋處的無數據區域.
從圖11 中可以看出,本次PIV 試驗大致描繪出了潛艇槳盤面處流場的幾項重要特征.首先,速度值呈現出沿徑向連續增大的圓圈式形狀;其次,4 個十字舵角度(0?,90?,180?,270?) 最外側的速度等值線向外凸出,速度等值線0.8~0.95 范圍表現出了十字舵后端由于速度削減效應產生的低速區的存在;另外,內側的速度等值線朝向槳軸中心凹陷,對應速度等值線范圍為0.4~0.8,這是由于主附體交接部位馬蹄渦作用造成動量交換,使得中心位置動量增大,兩側動量降低,從而形成近似“V”型的速度等值線結構.在徑向上表現為馬蹄渦將高動量的流體卷攜至徑向內部,低動量的流體卷攜至徑向外部.大潛深工況下,隨著Fr增大,流場結構特征基本一致.
在1.5D潛深工況下,隨著Fr增大,潛艇尾流場依舊存在上述幾項重要特征.進一步比較Fr對軸向速度的影響,可以發現隨著Fr增大潛艇上方外側速度等值線有不斷向下的趨勢,最外層0.95 等值線輪廓位于Y/R=1 處.與此同時,上方等值線整體趨于扁平化,由指揮臺圍殼脫落的馬蹄渦而形成的速度等值線凸起越來越不明顯.這是由于潛艇近水面航行時,不同Fr下興波高度不同,自由面與艇體伴流相互作用.
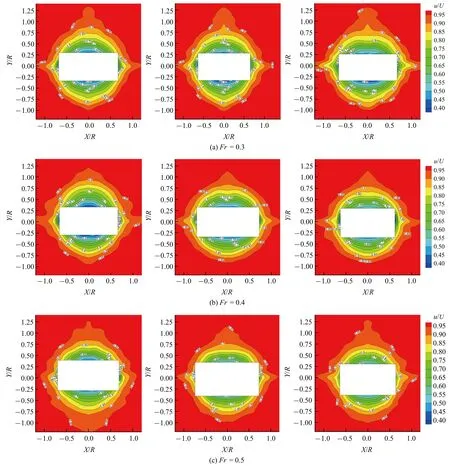
圖11 不同潛深工況下槳盤面軸向速度云圖(左側為1.5D 潛深工況,中間為2.5D 潛深工況,右側為4D 潛深工況)Fig.11 Axial velocity of propeller disk under different submergence conditions(1.5D submergence depths on the left,2.5D submergence depths in the middle and 4D submergence depths on the right
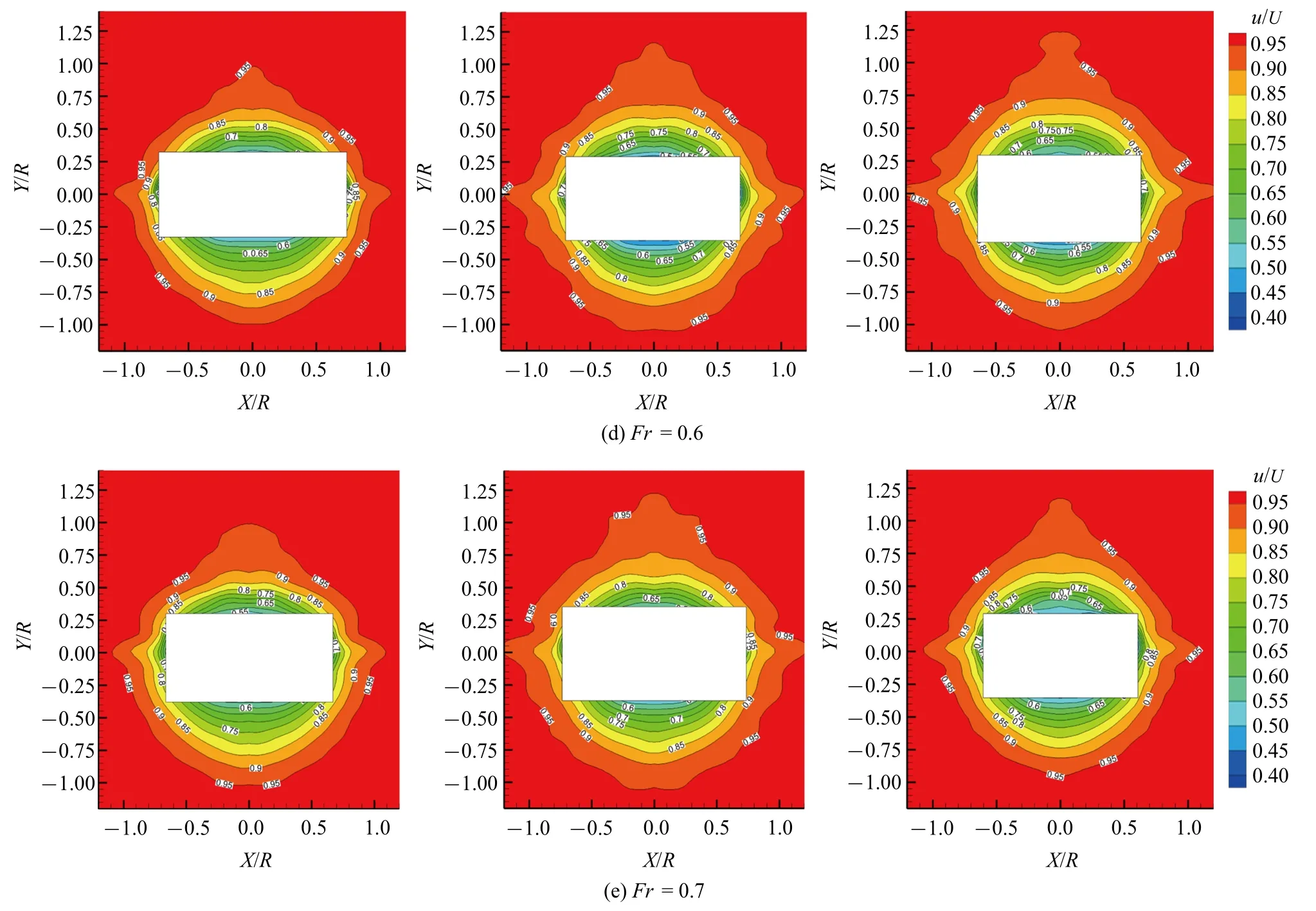
圖11 不同潛深工況下槳盤面軸向速度云圖(左側為1.5D 潛深工況,中間為2.5D 潛深工況,右側為4D 潛深工況)(續)Fig.11 Axial velocity of propeller disk under different submergence conditions(1.5D submergence depths on the left,2.5D submergence depths in the middle and 4D submergence depths on the right(continued)
不同潛深工況下潛艇尾流場流動特征基本類似.對比4D潛深、2.5D潛深與1.5D潛深槳盤面軸向速度分布,可以發現在低Fr時,1.5D潛深的上部分速度分布呈現較為飽和的半圓形分布,4D潛深的上部分速度有壓縮現象,2.5D潛深介于1.5D潛深和4D潛深之間.隨著Fr增大,自由面主要影響流場的上半區域,三種潛深工況下的速度均有壓縮趨勢,而1.5D潛深的壓縮現象更為明顯,2.5D潛深次之.在試驗過程中,觀察到高速工況對應的興波越發明顯,速度等值線體現出的特征應與興波密切相關,自由面產生了一種擠壓作用使得上半區域流場結構整體下移.由于2.5D潛深工況整體特性介于1.5D潛深和4D潛深之間,因此下文僅對1.5D潛深和4D潛深工況展開分析.
4.2 不同航速及潛深下潛艇尾部脈動速度場分析
由一系列的瞬時速度云圖分析得到脈動速度,并進行無量綱化處理,得到uRMS/U脈動速度云圖.4D潛深與1.5D潛深工況不同航速下脈動速度云圖分別如圖12 和圖13 所示.
從圖12 和圖13 中可以看出,脈動速度云圖與軸向速度云圖較為相似,為一圈圈向外延伸的等值線結構,不同點在于向外的脈動速度值不斷降低,在外流場達到0.02~0.03 的量級,同時在槳盤面內半徑區域以及尾舵梢部附近即Y/R=1 出現較大的脈動速度,這對應于馬蹄渦及梢渦的位置.
對比不同潛深下的脈動速度值,可以看出1.5D潛深下的脈動速度云圖受自由面影響較大,在局部上體現出脈動速度極大值點,同時隨著Fr增大,槳盤面上方速度等值線明顯下移,表明受自由面的影響,較大的脈動速度結構整體下移,體現出與軸向速度等值線相似的規律.
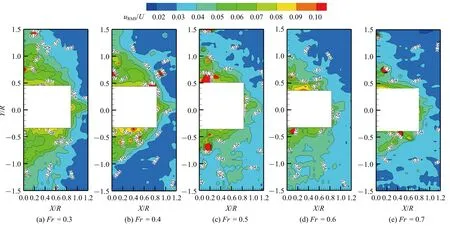
圖12 1.5D 潛深不同航速下脈動速度云圖Fig.12 Fluctuating velocity at different speeds of 1.5D depth
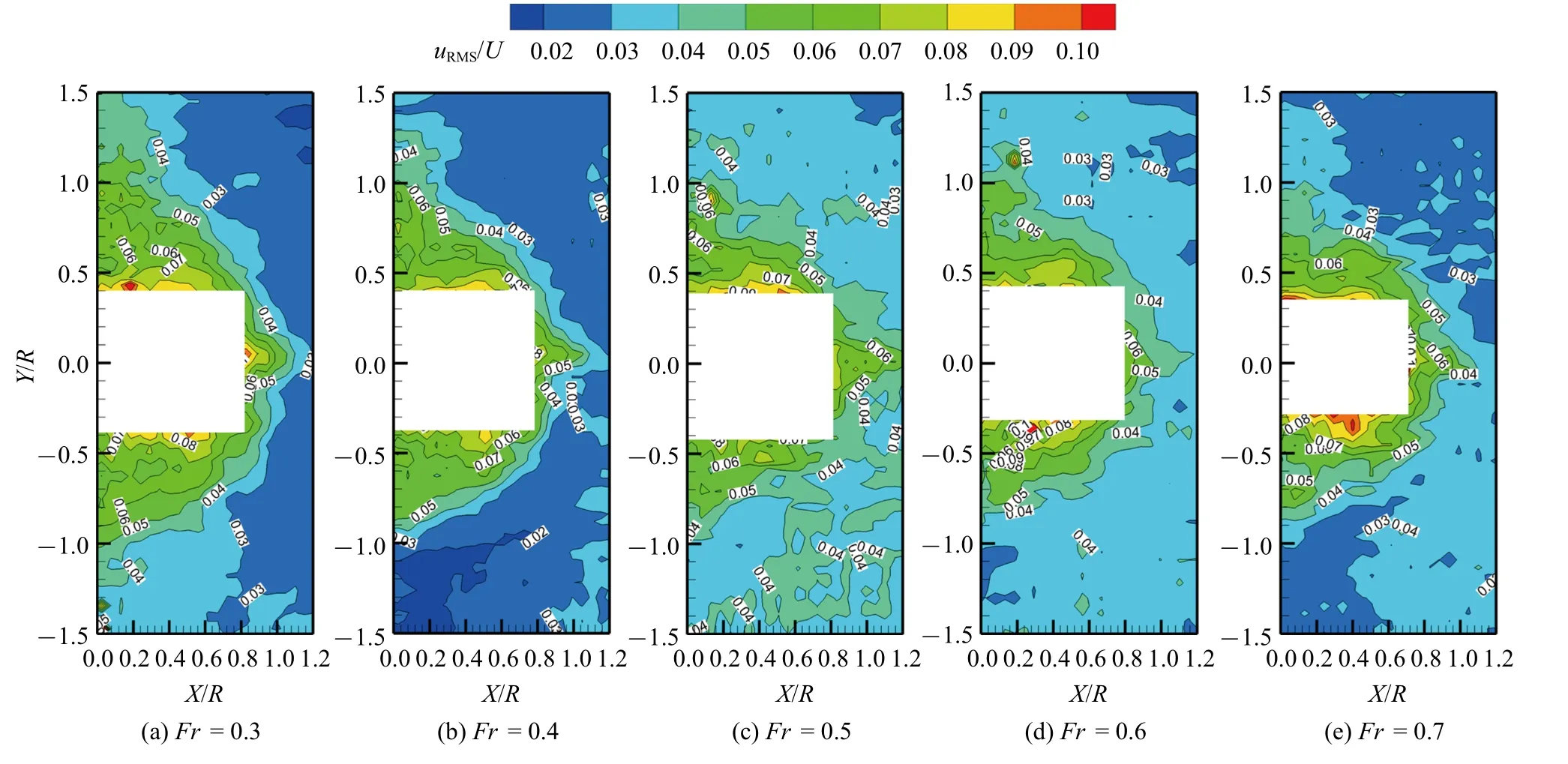
圖13 4D 潛深不同航速下脈動速度云圖Fig.13 Fluctuating velocity at different speeds of 4D depth
進一步提取0.6R范圍內的脈動速度值,如圖14所示,由于槳軸反光區域遮擋,60?~120?范圍數據缺失.從圖中可以看出不同潛深工況下槳盤面脈動速度隨Fr增大所體現出的趨勢是相同的.首先,在每個90?范圍內,脈動速度呈現出先下降后上升的趨勢,即對應每個尾舵后方都會出現較大的速度脈動,具有一定周期性.另外上半部分(0?~90?范圍)的脈動速度值略大于下半部分(90?~180?范圍)的脈動速度值,這就表明槳軸上方的流場會受到指揮臺尾流的影響,從而產生更大的脈動速度.相比于4D潛深工況,1.5D潛深時局部上出現脈動速度極大值點,且不同Fr間的脈動速度差值也有所增大,因此可知自由面的引入增大了流動的脈動特性.
4.3 對于PIV 測試結果的CFD 補充與擴展

圖14 槳盤面0.6R 處脈動速度對比Fig.14 Fluctuating velocity at 0.6R of propeller disk
由于PIV 測試難以實現對于潛艇興波的精確探測,僅能夠對大致波形進行觀察以完成粗略的對比,而CFD 計算可以精確地模擬出波浪的細節信息.本小節基于CFD 模擬結果,對潛艇近水面航行所興起的波浪進行量化分析,并給出中縱切面的波浪高度,從而在興波的角度對潛艇繞流場隨航速與潛深的變化規律進行解釋.
通過數值模擬發現,在4D潛深時,興波高度隨航速增大不斷提高,但不同航速對應的波浪峰值差距僅為毫米量級,完全可以忽略自由表面的影響,因此下文僅對1.5D潛深工況進行分析.
從圖15 可以看出,不同航速的潛艇興波具有以下規律:首先潛艇首部后方存在一個波峰,且航速越高,波幅越大.由于波長隨Fr增大而增大,在航速增大的情況下,興波波峰的起始位置會向艇后方移動.同時在潛艇尾肩部存在一波谷,隨著航速變大,波谷位置同樣向后移.因此在槳盤面位置總體表現為隨航速增大而降低的液面高度.

圖15 1.5D 潛深不同速度下潛艇中縱剖面波浪高度對比Fig.15 Comparison of wave height of longitudinal section in centre plane of submarine at different speeds of 1.5D
給出不同潛深及不同航速下的潛艇中縱切面速度云圖,如圖16 所示,左為1.5D潛深工況,右為4D潛深工況.
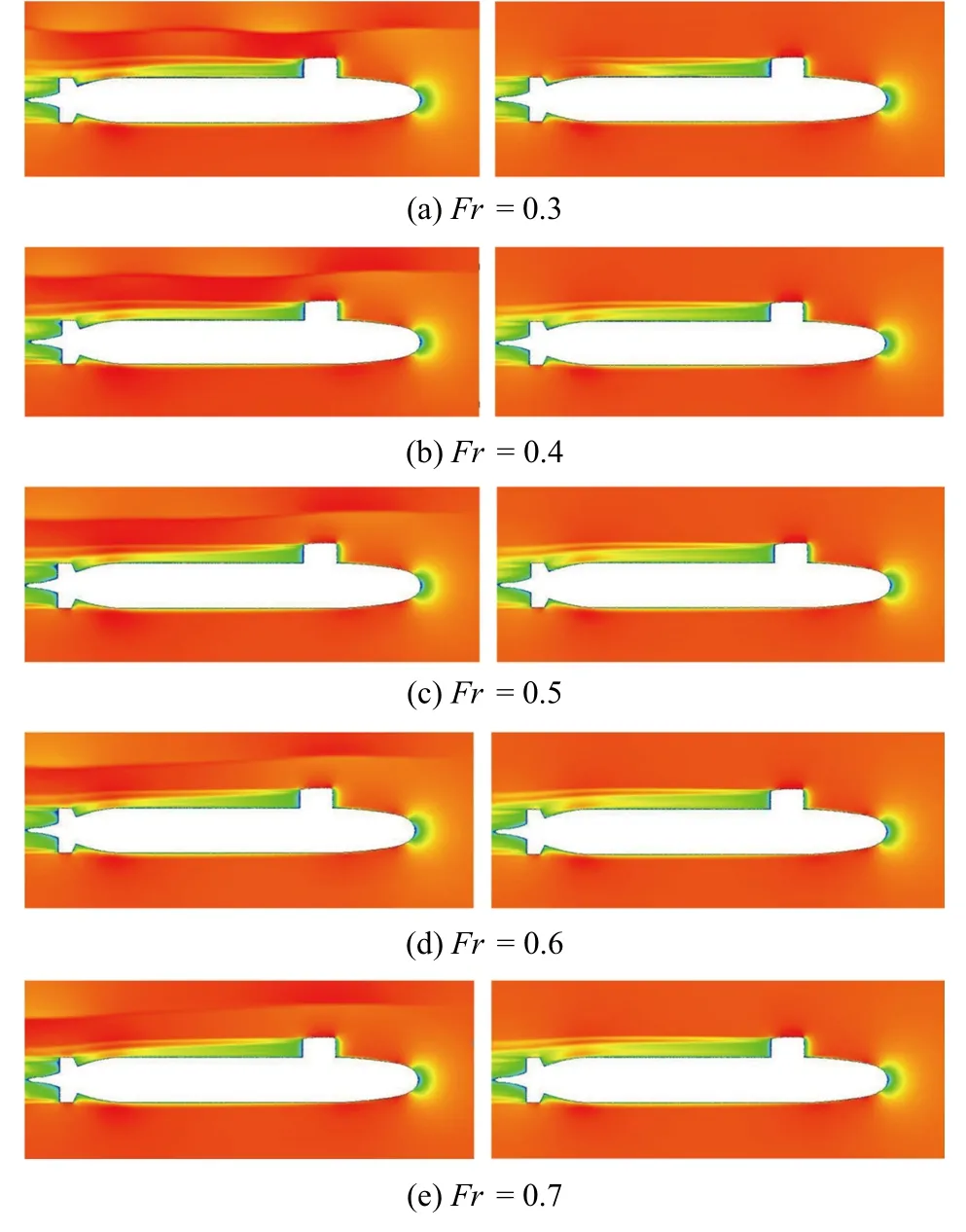
圖16 不同航速下潛艇中縱剖面速度云圖(左為1.5D,右為4D)Fig.16 Velocity nephogram of longitudinal section in centre plane of submarine at different speeds(1.5D submergence depths on the left and 4D submergence depths on the right)
通過對比不同潛深工況下速度云圖發現,自由液面存在對流場的最大影響體現在上半區域.同一航速下,近水面航行時,艇體與自由面間流場速度明顯增大,特別在波谷區域(對應槳盤面區域),流場速度明顯提升.這可以由文丘里效應合理地進行解釋,即受限流動在經過縮小的過流斷面時,流體流速會增大.由前文可知,隨著Fr提升,槳盤面處的液面高度越來越低,這就導致了槳盤面位置出現更大的流體速度,而流速的增大勢必會導致伴流場結構的變化.
5 結論
本文應用SPIV 系統對潛艇尾部流場進行測試,同時輔以數值模擬對試驗結果進行補充與擴展.通過對不同潛深工況不同航速的分析得到以下結論:
(1)在1.5D潛深工況下,隨著Fr增大,由于自由面產生的擠壓作用使得槳盤面上方速度等值線有不斷向下的趨勢,上方等值線整體趨于扁平化,由指揮臺圍殼脫落的馬蹄渦形成的速度等值線凸起越來越不明顯.
(2)每個尾舵后方都會出現較大的脈動速度,且具有一定周期性,在周期內,整體脈動速度呈現先下降后上升的趨勢.受指揮臺尾流影響,槳盤面上方流場體現出更大的脈動速度.自由面會增大流體的脈動特性,在1.5D潛深工況的脈動速度云圖中存在局部脈動速度極大值點,同時隨著Fr增大,槳盤面上方0.04 以上的速度等值線明顯下移,表明受自由面的影響,較大的脈動速度結構整體下移.
(3) 由于波長隨Fr增大而變大,隨著航速增大,興波波峰的起始位置向艇后方移動.同時在潛艇尾肩部存在一波谷,隨著航速增大大,波谷位置同樣向后移.因此在槳盤面處總體表現為自由面高度隨航速增大而降低.
(4)自由面存在時,艇體與自由面間流場速度明顯增大,特別是波谷區域,也恰好對應槳盤面區域,流場速度明顯提升.隨著Fr增大,槳盤面處的液面高度越來越低,這就導致了槳盤面位置出現更大的流體速度,即造成了槳盤面伴流場擠壓現象的發生.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19