基于逐步回歸法的泵站輸水管道壓力監測技術
2021-03-26 06:25:52王輝
廣西水利水電 2021年1期
王 輝
(東莞市水利勘測設計院有限公司,廣東 東莞 523115)
1 基于逐步回歸法的泵站輸水管道壓力監測技術設計
1.1 流體流動的計算和模擬
通過計算結構動力學系統對泵站輸水管道進行建模,以對其進行流體流動的計算和模擬[1]。在建模過程中基于逐步回歸法對各個最優變量進行引入:每個解釋變量被引入后都要對其實施F檢驗,對于被選的解釋變量,則需要逐個對其實施t檢驗。當被選的解釋變量在后面繼續對解釋變量進行引入的過程中變得不夠顯著則對其進行刪除處理,確保對新變量進行引入時回歸方程里只有顯著性變量[2]。反復實施該過程,直到回歸方程里沒有可選入的顯著解釋變量,也沒有可剔除的不夠顯著的解釋變量,獲取擁有最優解釋變量集的回歸方程,通過該回歸方程在建模過程中對各個最優變量進行引入。計算結構動力學系統具備高效分析數據結構與內存動態分配的功能,并且在建模網格的后處理與預處理方面靈活性很強[3]。計算結構動力學系統共包括3個模塊,各模塊功能見表1。
利用計算結構動力學系統進行泵站輸水管道流體流動計算和模擬,過程見表2[4]。
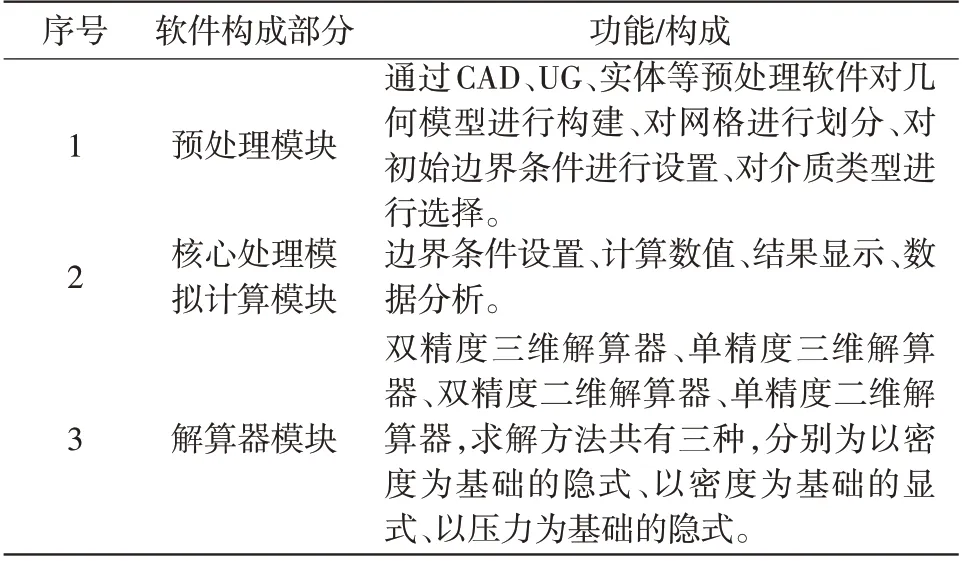
表1 各模塊具體功能
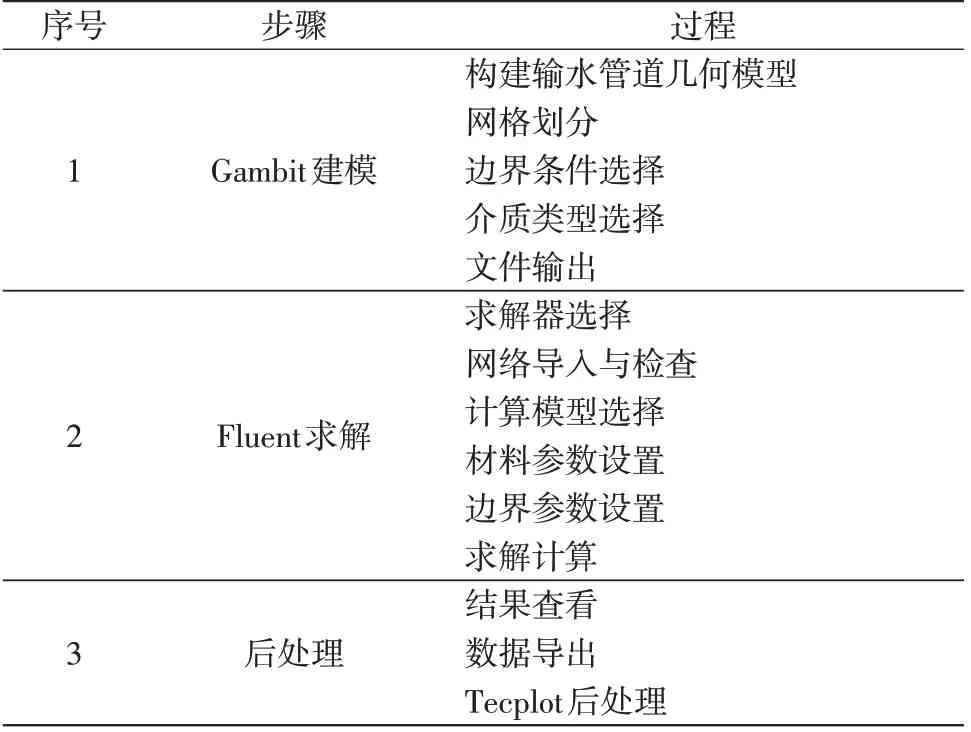
表2 流體流動計算和模擬過程
1.2 數據采集與分析
通過輸水管道數據采集系統進行泵站輸水管道數據采集,該系統的具體構成包括連接電纜、計算機、水聽器分析儀、水聽器,技術指標見表3[5]。
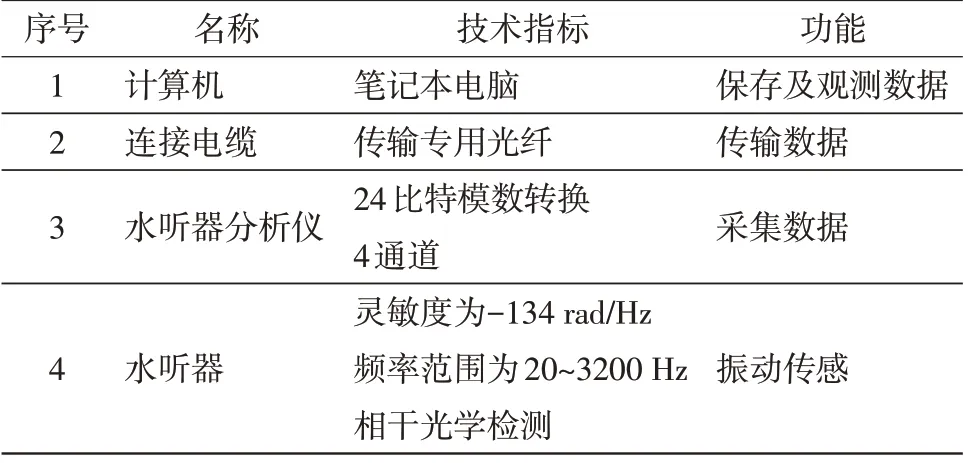
表3 技術指標
通過多道信號與光纖水聽器的相關分析軟件實施采集數據分析,該軟件具備振動監測、檢測、勘探功能,能夠進行濾波處理、振幅分析處理、頻譜分析處理、波形分析處理[6]。通過傅里葉變換對采集數據實施濾波處理。
1.3 實現輸水管道壓力監測
通過光時域相敏反射計的布設對由外界振動而引起的光纖折射率變化進行檢測,布設的光時域相敏反射計與其他結構共同構成一個Φ-OTDR 系統,實現泵站輸水管道壓力監測,其中對光時域相敏反射計進行布設需要根據采集的數據來進行[7]。光時域相敏反射計是一種頻移低、線寬窄的激光器,線寬處于幾個千赫之內。Φ-OTDR系統的光纖傳感光源為脈沖窄帶光源,其壓力監測原理見圖1[8]。
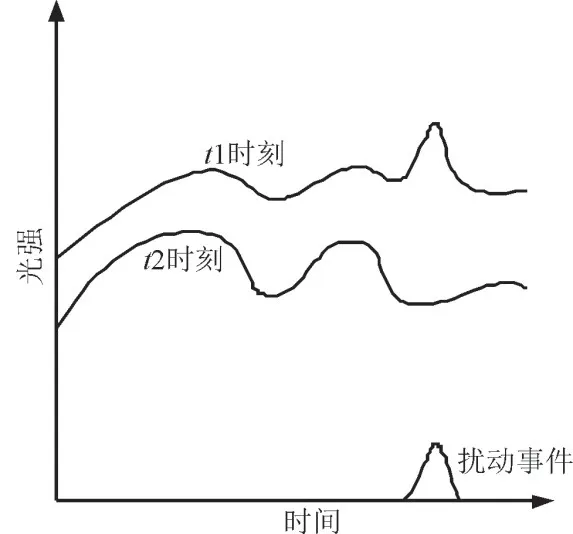
圖1 壓力監測原理
Φ-OTDR 系統具體構成包括光時域相敏反射計、環形器、信號處理器、解調器。Φ-OTDR 系統主要通過光時域相敏反射計對連續光進行輸出,接著利用解調器實施調制,把連續光變成脈沖探測光并向環形器輸入,經過環形器后脈沖探測光最終進入待測光纖[9]。此時由于被測光纖在各處存在不同的折射率,會發生瑞利散射情況。后向瑞利散射光會通過環形器流向信號處理器。通過信號處理器能夠把時域光信號變為時域電信號,然后通過計算機對數據文件進行輸出[10]。只需最后進行數據監測就能夠實現泵站輸水管道壓力監測[11]。通過Φ-OT?DR 系統監測儀實現輸水管道壓力監測,該監測儀的參數見表4。
表4 監測儀的參數
Φ-OTDR 系統的測量信號見圖2[12]。
圖2 Φ-OTDR系統的測量信號
在利用Φ-OTDR 系統進行泵站輸水管道壓力監測的過程中,Φ-OTDR 系統的動態范圍的計算公式為:

式中:R 為Φ-OTDR 系統的動態范圍;g 為傳輸損耗;Ps(0)為信號處理的對應信噪比;Pn為接收靈敏度[13]。

壓力監測過程中Φ-OTDR 系統的空間分辨率計算公式為:式中:Δz為Φ-OTDR 系統的空間分辨率;c為真空中光的速度;Tp為探測脈沖的具體寬度;ηs為群折射率[14]。
2 監測實驗
2.1 方法設計
為證明基于逐步回歸法的泵站輸水管道壓力監測技術的性能,對其進行實驗驗證。搭建實驗管道系統,對其實施壓力監測實驗。實驗輸水管道的數據見表5。
表5 實驗輸水管道的數據
實驗管道系統在不同工況下流量與壓力的變化情況見表6。
表6 實驗管道系統在不同工況下流量與壓力的變化情況
實驗管道系統由溫度傳感器、數字壓力高精度傳感器、一體式智能電磁流量計、雙閘板單作用氣動閘閥、化工石油流程泵、蓄水池構成(見圖3)。
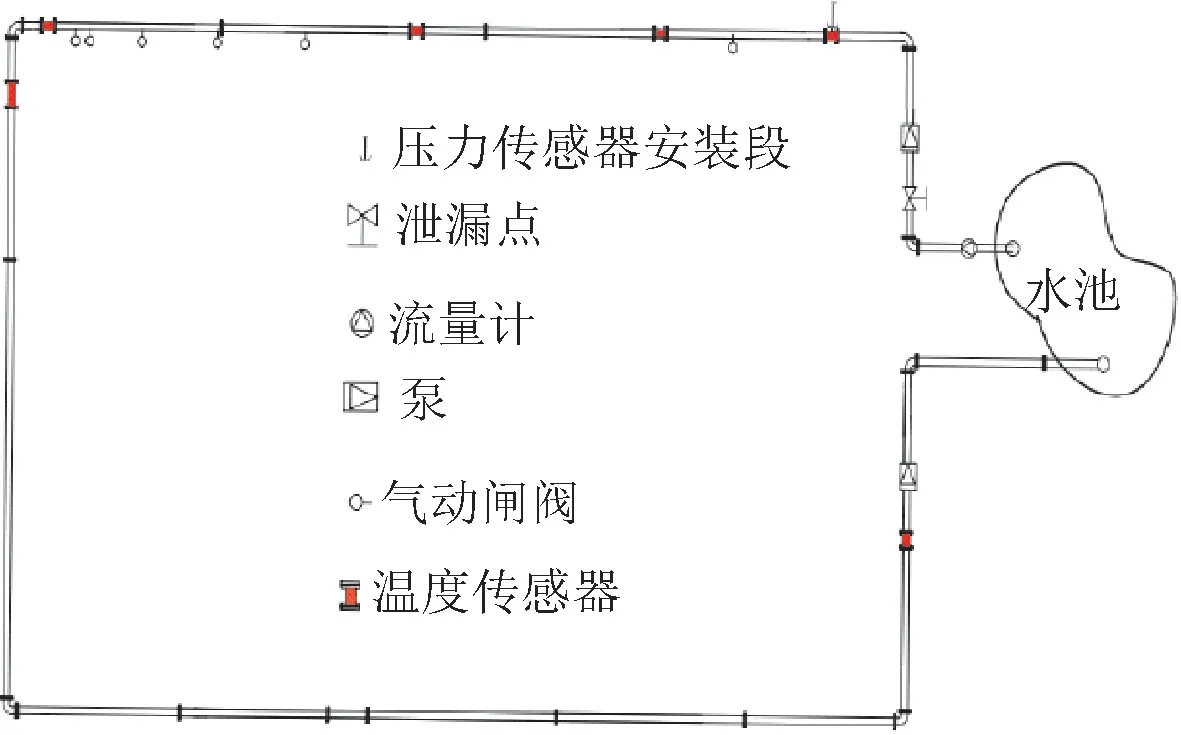
圖3 實驗管道系統構成示意圖
實驗管道系統相關指標見表7。
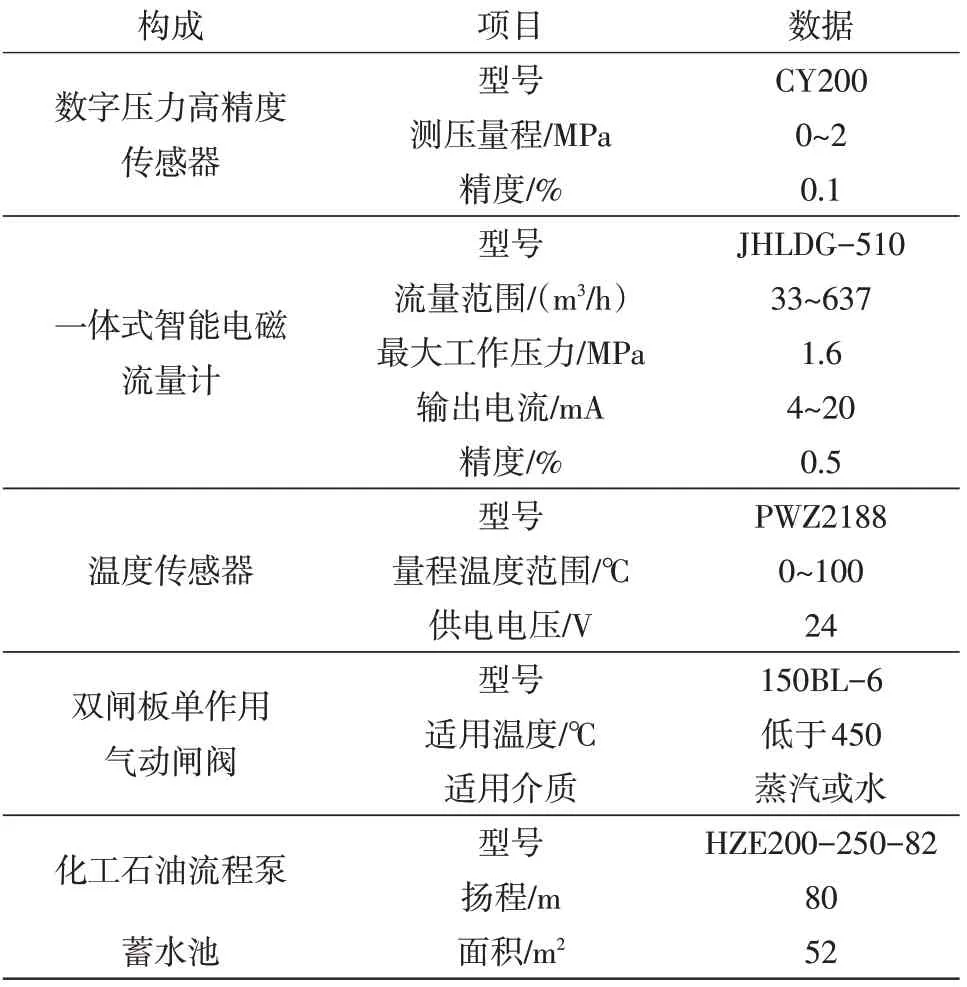
表7 實驗管道系統具體數據
實驗管道系統的安裝圖見圖4。

圖4 實驗管道系統的安裝圖
利用設計的基于逐步回歸法的泵站輸水管道壓力監測技術對實驗管道系統進行輸水管道壓力監測。以采集點為300~500個范圍內的監測差分幅值波動幅度數據作為實驗數據。為避免本次實驗結果過于單一、缺乏對比性,將原有的兩種技術(分別為基于數值模擬方法、基于卡爾曼濾波器的泵站輸水管道壓力監測技術)作為實驗中的對比方法,比較幾種實驗技術的監測差分幅值波動幅度實驗數據。
2.2 結果研究
在采集點為300~400 個的范圍內,基于逐步回歸法的泵站輸水管道壓力監測技術與基于數值模擬方法、基于卡爾曼濾波器的泵站輸水管道壓力監測技術的監測差分幅值波動幅度實驗數據對比結果見圖5。
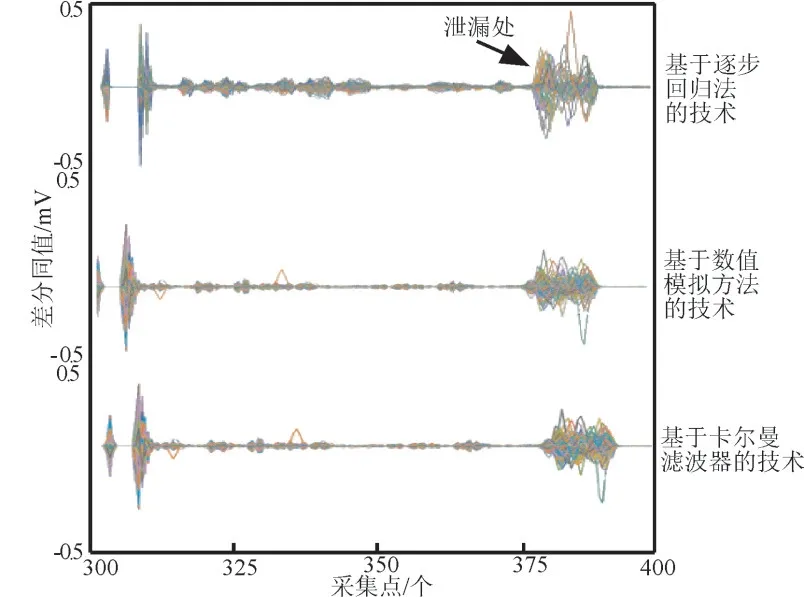
圖5 監測差分幅值波動幅度實驗數據對比結果(采集點為300~400個)
由圖5 可知,基于逐步回歸法的泵站輸水管道壓力監測技術的監測差分幅值波動幅度均高于基于數值模擬方法、基于卡爾曼濾波器的泵站輸水管道壓力監測技術的監測差分幅值波動幅度,能夠更迅速地對泄漏處進行定位。
在采集點為400~500個的范圍內,基于逐步回歸法的泵站輸水管道壓力監測技術與基于數值模擬方法、基于卡爾曼濾波器的泵站輸水管道壓力監測技術的監測差分幅值波動幅度實驗數據對比結果見圖6。
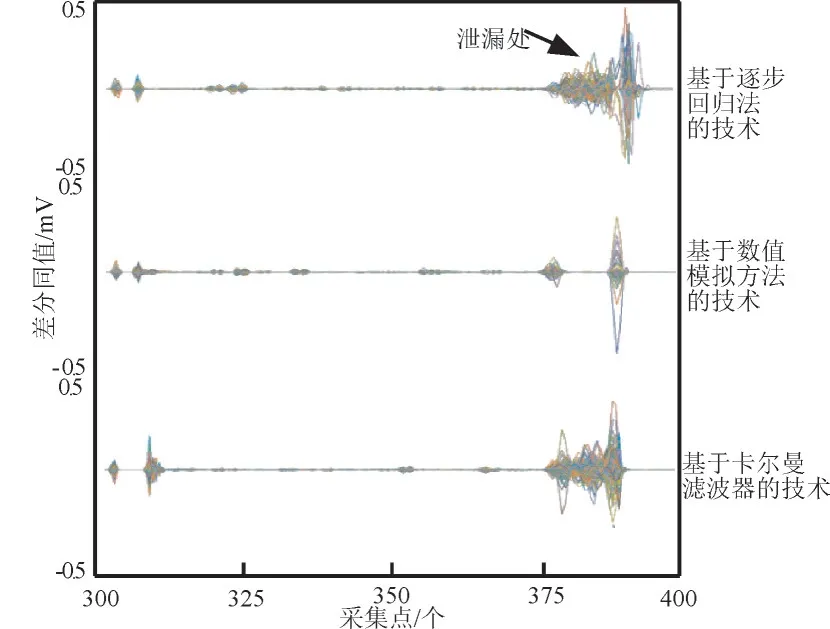
圖6 監測差分幅值波動幅度實驗數據對比結果(采集點為400~500個)
由圖6可知,基于逐步回歸法的泵站輸水管道壓力監測技術的監測差分幅值波動幅度均高于基于數值模擬方法、基于卡爾曼濾波器的泵站輸水管道壓力監測技術的監測差分幅值波動幅度,同樣能夠更迅速地對泄漏處進行定位。
3 結語
基于逐步回歸法的泵站輸水管道壓力監測技術實現了監測差分幅值波動幅度的提升,對于供水系統安全性的提升有較大意義。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
湖南水利水電(2021年6期)2022-01-18 06:07:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
河南水利年鑒(2017年0期)2017-05-19 02:32:09
發明與創新(2016年38期)2016-08-22 03:02:52
河南水利年鑒(2016年0期)2016-08-03 05:01:40
