輪胎吊遠程控制系統
2021-03-28 21:21:17葉海青
河南科技 2021年32期
葉海青
摘 要:本文介紹了輪胎吊遠程控制系統中自動裝卸系統的組成、工作原理及功能,詳細闡述各個控制單元的具體功能和結構,為港區輪胎吊的遠程控制和自動化建設改造提供理論基礎。
關鍵詞:輪胎吊;遠程控制系統;自動裝卸
中圖分類號:U653.921;TP273 文獻標識碼:A 文章編號:1003-5168(2021)32-0016-04
Tyre Crane Remote Control System
—Overview of Automatic Loading and Unloading System
YE Haiqing
(Xiamen Hairun Container Terminal Co., Ltd., Xiamen Fujian 361000)
Abstract: This paper introduces the composition, working principle and function of the automatic loading and unloading system in the remote control system of the tire crane, and decomposes the specific function and structure of each control unit in detail, so as to provide a theoretical basis for the remote control and automation construction and transformation of the tire crane in the port area.
Keywords: tire crane;remote control system;automatic loading and unloading
自動化堆場系統具有降低勞動力成本、改善操作工藝、提高設備利用率、減少待機空耗以及降低設備能源消耗等優勢[1]。輪胎式集裝箱門式起重機是集裝箱碼頭及堆場的集裝箱裝卸專用機械。實現其自動化改造,不僅可以極大地節約人工成本,而且能提高作業安全性和作業效率。目前,輪胎吊自動化作業系統還未有廣泛實施的案例,大部分還處于試用階段[2]。輪胎吊自動化輪胎式門式起重機(Automatic Rubber Tired Gantry,ARTG)遠程操作系統是輪胎吊自動化改造的一項重要內容,簡要分析自動裝卸系統的組成、工作原理及功能。
輪胎吊ARTG遠程操作系統自動裝卸功能是:對內集卡裝卸作業時,在司機監護下實現“一鍵自動抓放箱”;對外集卡車作業時,小車自動運行到外集卡車上方,起升自動下放至安全高度以下后,由司機手動完成對箱、著箱、閉鎖或放箱、著箱/開鎖動作,將吊具起升到安全高度后,單機自動控制系統(Automated Crane Control System,ACCS)控制龍門吊進入自動控制狀態。
單機自動控制系統作為自動化控制系統的中樞,統籌吊具檢測系統(Spreader Detection Sensor,SDS)、目標檢測系統(Target Detection System,TDS)、最終著箱檢測系統(Landing Check System,LCS)、輪胎吊開底系統、吊具負載防撞保護系統(Loading Collision Protectiong System,LCPS)、集卡定位系統(Chassis Position System,CPS)及防集卡吊起(Anti-Truck Lifting System,ATL)等子系統協調運作,共同完成自動裝卸功能。
1 單機自動化控制系統
1.1 單機自動化控制系統概述
單機自動化系統主要包括自動化控制系統、吊具檢測系統及目標檢測系統等子系統。每臺ARTG上裝有自動控制系統、設備控制系統(Equipment Control System,ECS)及堆場管理系統,從碼頭操作系統(Terminal Operating System,TOS)獲取任務,并把任務分解后發送給單機自動控制系統。單機自動控制系統根據作業指令觸發目標檢測系統的掃描功能,根據掃描數據,控制吊具檢測系統調節吊具到目標位置,從而完成自動作業。
1.2 ACCS的主要作用
ACCS的主要作用包括:①接收堆場管理系統(Block Management System,BMS)的自動運行指令并反饋指令執行情況;②與底層可編程邏輯控制器(Programmable Logic Controller,PLC)系統交互,實時檢測設備各機構的運行狀態,并根據自動運行指令生成自動運行流程,計算各機構(起升、小車、吊具)的控制命令和參數,根據目標檢測系統或吊具檢測系統提供的數據,控制底層PLC大車、小車、上架微動等各機構的運行,或根據遠程手動操作指令,通過底層PLC配合,驅動各機構自動運行,完成工作指令。
2 吊具檢測系統
2.1 系統概述
吊具檢測系統是基于光學原理及圖像處理技術的系統,主要應用于自動化碼頭的場橋或岸橋作業。在吊具上安裝防搖反射板,在小車架上安裝防搖攝像頭,實時監測反射板狀態、吊具晃動角度和力度,系統依次計算吊具的空間位置和姿態信息,自動調節小車,使小車跟隨吊具擺動以減少吊具晃動[3]。
吊具檢測系統在自動化作業時,通過檢測安裝在吊具上的紅外結構光源位置計算出吊具空間位置和姿態信息,并將這些信息發送給控制系統。依照吊具檢測系統檢測結果,設備控制系統可以控制岸橋或場橋吊具更加快速、準確、有效地工作,從而提高設備的工作效率和安全性。
2.2 工作原理
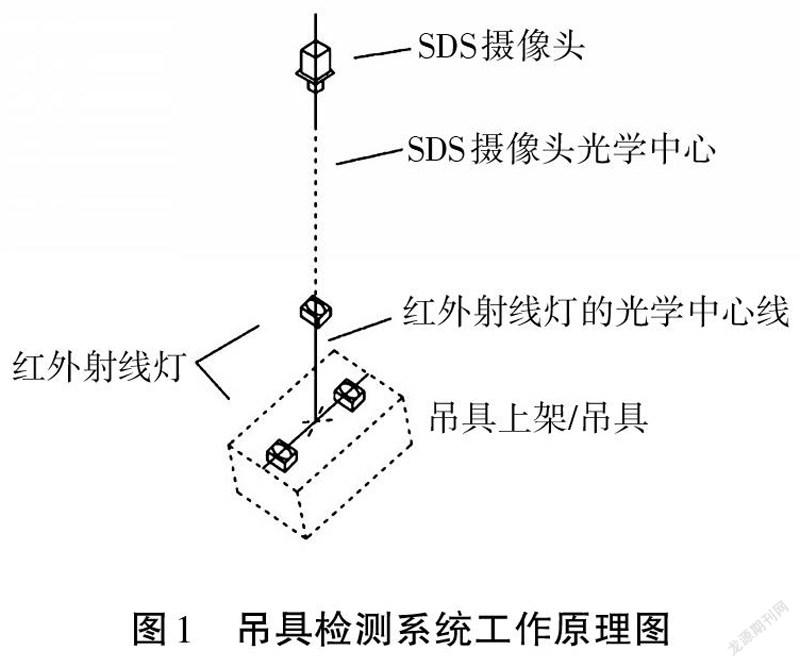
如圖1所示,SDS攝像頭通過實時檢測安裝在吊具上的紅外光源,確定吊具的位置和姿態。通過SDS控制器與ACCS控制系統進行數據交互,實現對吊具的控制和調整。
2.3 主要功能
吊具檢測系統的功能主要包括:[①]檢測吊具繞起升方向的旋轉角度;[②]檢測吊具繞小車方向的旋轉角度;[③]檢測吊具繞大車方向的旋轉角度;[④]檢測吊具沿小車方向的偏移量;[⑤]檢測吊具沿大車方向的偏移量;[⑥]檢測吊具高度;[⑦]檢測吊具擺動角度。
3 目標檢測系統
3.1 系統概述
目標檢測系統是基于3D激光技術的檢測系統,主要應用于自動化港口軌道吊或輪胎吊。
目標檢測系統在自動化作業時,通過檢測集裝箱、集卡、自動導引運輸車(Automated Guided Vehicle,AGV)和伴侶支架(AGV交互區緩沖區支架)等,將提取出來的信息傳送給控制系統,從而實現對設備的安全保護和對目標物體的精確定位。
3.2 工作原理
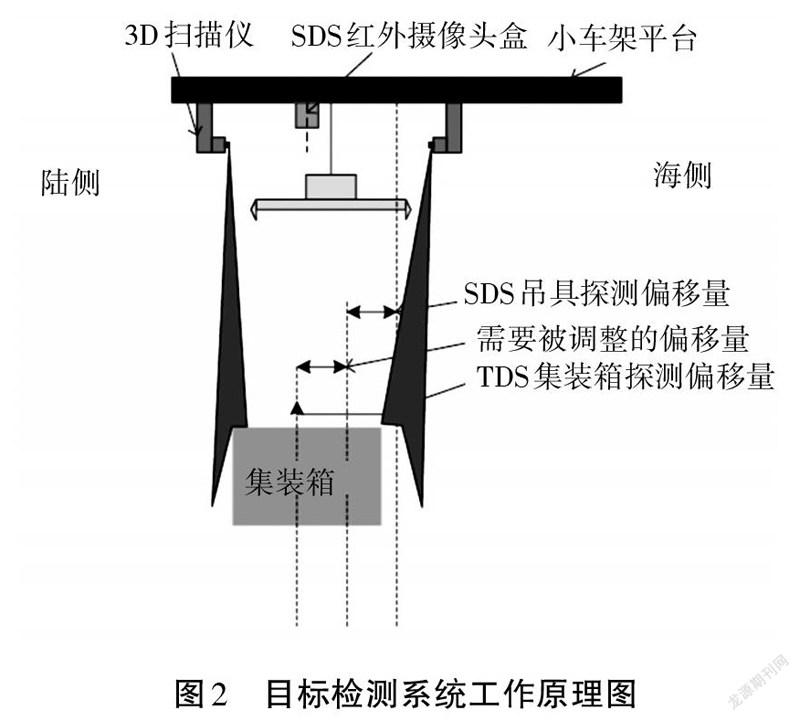
目標檢測系統工作原理如圖2所示。小車到達作業目標位置后,目標檢測系統使用2個3D掃描儀對吊具下方集裝箱進行掃描,以獲取集裝箱位置信息,并將檢測結果傳送給ACCS系統。
3.3 主要功能
目標檢測系統的功能主要包括:[①]檢測目標位置集裝箱高度;[②]檢測目標集裝箱尺寸;[③]檢測目標集裝箱位置信息;[④]檢測目標雙標箱間隙;[⑤]內集卡自動化時,實時監控內集卡車頭位置,具有車頭保護功能。
4 最終著箱檢測系統
4.1 系統原理
最終著箱檢測系統用于檢測集裝箱起重機在疊箱后箱與箱之間是否對齊[4]。通過此系統可快速準確地得知疊箱偏差是否在偏差范圍內。如果超出偏差范圍(一般為4 cm),單點激光器會檢測到下方集裝箱的高度(2.5~3.2 m),說明此時箱與箱之間沒有對齊,需要重放。如果上下兩層集裝箱對齊,則激光器檢測不到下放集裝箱高度,檢測高度設在2.5~3.0 m。
4.2 安裝示意
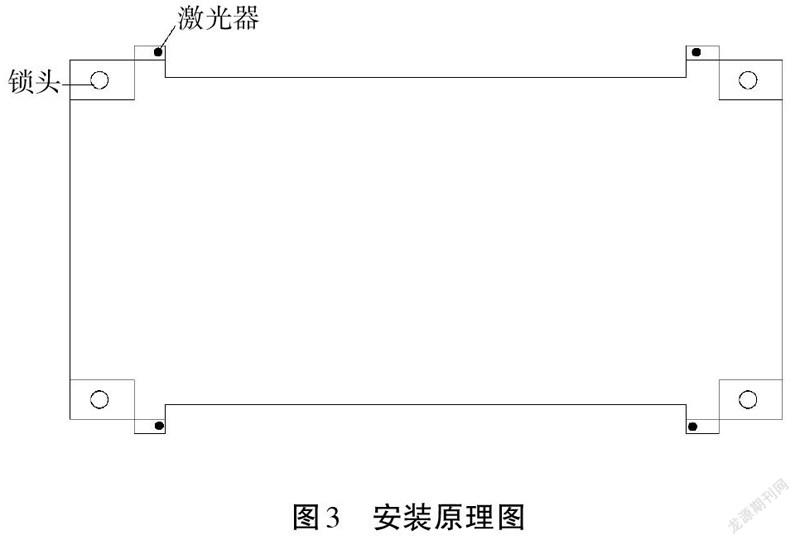
如圖3所示,吊具4個角附近各安裝一個激光測距儀,沿吊具大車方向安裝。輪胎吊根據現場情況可能需要安裝6個單點激光測距儀。
5 輪胎吊開底系統
輪胎吊開底系統的功能主要包括以下兩方面。
第一,標記地面箱位位置。在自動化輪胎吊作業過程中,由于輪胎吊姿態容易發生扭轉,且大車行走軌跡無法固定,因此放一層箱時,需要先確定目標位置,才能將集裝箱準確放到堆場指定位置。在對應的箱位4個角安裝定位標識,借助目標檢測系統掃描地面標志物并計算目標位置,再提供給自動化控制系統。
第二,輔助判別箱子是否放正。一層箱放完以后,需要確認箱子是否放正,此時通過目標檢測系統掃描箱角4個標識,計算箱子離標準箱位的偏差,并將偏差提供給自動化系統。如果偏差在允許范圍內,則開鎖,放箱完成。如果掃描后發現箱子放偏,則進行重放。重放次數最多3次,3次后如果還沒有放正,則進入人工協助模式。
6 吊具負載防撞保護系統
6.1 系統概述
吊具負載防撞保護系統是基于激光技術的檢測系統,主要用于實時掃描起重機下方的障礙物信息,結合單機小車位置建立堆場障礙物輪廓信息,并與起重機控制系統PLC一起實現小車運行方向的吊具防撞保護和起升方向的軟著陸功能,大大提高了起重機的作業效率和安全性。
6.2 工作原理
吊具負載防撞保護系統利用激光器沿小車方向實時掃描下方障礙物,結合實時的小車位置建立堆場輪廓信息,實時提供小車和起升速度等數據給單機PLC,實現起升方向的軟著陸和小車運行方向的吊具防撞保護功能。系統會跟進吊具的開、閉鎖信號,切換吊具的保護高度范圍。
6.3 主要功能
吊具負載防撞保護系統的主要功能包括:[①]小車運行方向的吊具防撞保護;[②]起升方向的軟著陸。
6.4 小車運行方向的吊具防撞保護功能
在小車運行方向上,如果空吊具底部(吊具無箱)或者集裝箱底部(吊具有箱)的位置低于障礙物,LCPS會計算小車運行路徑上的障礙物和吊具或者集裝箱之間的距離,并實時輸出小車運行的限定速度,保證吊具在距離障礙物3 m(可配置)時小車的運行速度減速到全速的10%(可配置)。當吊具或者集裝箱底部高度高于障礙物時,小車限速解除。
6.5 起升方向的軟著陸功能
當起升下降時,LCPS會檢測吊具或者所抓箱子的底部與下方障礙物的距離,將起升限定速度值發送給PLC,以控制起升減速。當距離達到安全距離(一般為1 m)時,起升速度將會減到全速的10%,并一直以此速度下降至著箱。
6.6 系統限制
第一,受到激光器精度的限制,系統只能檢測足夠大的障礙物,最小可測量障礙物直徑為10 cm。第二,系統僅僅適用于小車后停止且在集卡車道上方的輪胎吊或軌道吊。
7 集卡定位系統
7.1 系統概述
集卡定位系統是基于激光技術的檢測系統,主要用于起重機下引導集卡司機快速、準確地停靠到正確位置,提高起重機的作業效率。
在傳統的起重機集卡裝卸作業中,集卡司機只能憑借個人經驗停靠集卡,容易出現集卡和起重機吊具之間裝卸誤差值較大的情況。為此,集卡司機不得不反復地移動集卡直到吊具能進行裝卸箱,降低了集卡和起重機的工作效率。
而集卡定位系統利用激光器實時檢測集卡位置,通過集卡位置顯示屏實時顯示集卡當前位置與正確停靠位置在大車方向上的距離偏差,引導集卡司機快速、準確地停靠到正確位置,極大地提高了起重機的工作效率。
7.2 工作原理
集卡定位系統利用激光器沿大車方向實時掃描集卡,根據作業參數和起重機狀態信息判斷當前的引導工況,并通過集卡位置顯示屏引導集卡司機對位。
7.3 主要功能
集卡定位系統的功能主要包括:自動檢測作業車道上的集卡駛入信號,自動觸發集卡引導功能;自動檢測集卡裝卸作業工況;集卡上雙標箱大車方向間隙檢測功能(間隙需要大于15 cm);集卡帶雙標箱連續引導卸標箱功能;空集卡連續引導裝2個標箱功能;集卡上箱型檢測功能;作業完成后,自動提示集卡離開功能;集卡引導過程中禁止吊具下降的車頭防砸保護功能;集卡位置顯示屏可實時顯示工作車道、集卡移動方向和集卡移動距離;檢測空集卡或箱子的小車方向位置;檢測空集卡或箱子的傾轉角度。
7.4 系統限制
7.4.1 集卡跟車距離。當一輛集卡位于起重機下方的工作車道時,后方集卡必須遠離該工作集卡,否則集卡定位系統無法正常工作。
7.4.2 集卡工作區域。集卡司機必須駛入起重機司機所選工作車道內,否則集卡定位系統無法正常工作。
7.4.3 吊具凈空高度。如果集卡還未到達正確位置,起重機司機必須將吊具停止在凈空高度以上等待,否則吊具會影響激光器檢測集卡。凈空高度必須在引導定位單元高度以上。
7.4.4 集裝箱要求。集裝箱只能是單TEU、1.5TEU、2TEU、2.25TEU以及雙標箱的標準集裝箱,且箱子表面無嚴重損壞。
8 防集卡吊起系統
8.1 系統概述
場橋是集裝箱專業化碼頭堆場作業的主要作業機械,但也是碼頭生產安全事故多發的設備。為了確保場橋生產作業安全,提高作業效率,本方案提供了防集卡吊起系統,豐富和完善了場橋的應用系統。
在作業過程中,場橋起升的主要安全隱患之一是集卡鎖銷未完全打開,將集裝箱連同集卡一并吊起或是半邊吊起,通常稱之為吊集卡事故。
本系統采用激光掃描測距原理、模式識別和自動控制技術,實現吊具、集裝箱、集卡等的實時位置檢測,并根據安全控制策略實現起升機構的運行控制,實現防吊集卡功能,避免生產事故的發生,提升集裝箱裝卸的安全性。
8.2 系統功能
在卸車作業過程中,吊具閉鎖并從集卡上將集裝箱吊起時,激光掃描測距儀實時檢測集裝箱與集卡拖板之間的距離。如果集裝箱與集卡未分離,系統立即自動發送停止命令,停止吊具起升。
當系統控制吊具上升停止后,司機只能操作吊具下降,不能起升。吊具下放到松繩和著箱后,起升上升的限制解除。允許集卡司機打開鎖頭繼續工作。
系統在司機控制臺上提供功能啟停選擇開關。當功能啟停選擇開關處于“關”的位置時,防吊集卡功能停用,吊具起升不具有防吊集卡保護功能。
系統在司機控制臺上提供狀態指示燈。當防吊集卡功能處于停用狀態時,指示燈熄滅;當防吊集卡功能處于使用狀態時,指示燈長亮;當系統發生故障時,指示燈閃爍。
同時,系統在司機控制臺上提供防吊起控制單次旁路開關,選用帶指示燈的復位開關。當防吊起觸發時,系統控制吊具停止上升,指示燈亮起,司機可按下旁路開關,進行單次控制旁路;當防吊起未觸發或旁路時,指示燈熄滅。
9 結語
輪胎吊的自動化裝卸系統以單機自動化系統為核心,統一調度吊具檢測系統、目標檢測系統、最終著箱檢測系統、輪胎吊開底系統、吊具負載防撞保護系統、集卡定位系統及防集卡吊起系統等子系統配合運行,共同實現設備遠程自動化裝卸集裝箱的目的。該自動裝卸系統可大大降低司機的勞動強度,減少人力成本,具有提高作業精準度、箱位反饋及時和提高作業裝卸安全等優勢[5],是實現港區現場自動化和無人化作業的核心組成部分。
參考文獻:
[1]徐哲.輪胎吊自動化改造研究[J].科技經濟導刊,2018(3):49.
[2]曹民,朱愛璽,黃秀松,等.集裝箱堆場輪胎吊自動化作業系統仿真及實測[J].中國航海,2017(4):86-90.
[3]朱健榮.自動化技術在集裝箱空箱軌道龍門吊上的應用[J].中國港口,2019(4):57-59.
[4]鄭軍.自動化堆場軌道式集裝箱門式起重機的定位技術[J].港口裝卸,2012(5):33-36.
[5]劉建軍,洪朝俊,高管豐.門式起重機裝卸作業半自動化系統設計[J].鐵道貨運,2011(9):26-30.