輸煤廊道智能巡檢機器人的開發應用
2021-03-28 21:21:17李旭黃曉明司朝輝
河南科技 2021年32期
李旭 黃曉明 司朝輝

摘 要:討論輸煤廊道中智能巡檢機器人的研發與應用,介紹智能巡檢機器人結構,分析組成機器人的各個部分與功能,闡述智能巡檢機器人功能設計要點,以滿足輸煤廊道巡檢要求。最后,從巡檢機器人無線射頻識別(Radio Frequency Identification,RFID)定位、輸煤廊道巡檢故障的檢測與識別及其他方面介紹智能巡檢機器人的應用方法,實現輸煤廊道智能化巡檢,提高巡檢效率,為今后輸煤廊道巡檢工作技術的提升奠定基礎。
關鍵詞:輸煤廊道;智能巡檢機器人;軌道系統;防火門
中圖分類號:TD67;TP242.6 文獻標識碼:A 文章編號:1003-5168(2021)32-0023-03
Development and Application of Intelligent Inspection Robot for Coal Conveying Corridor
LI Xu HUANG Xiaoming SI Zhaohui
(Guoneng Jiujiang Power Generation Limited, Jiujiang Jiangxi 332000)
Abstract: This paper discusses the development and application of intelligent inspection robot in coal transportation corridor. The structure of intelligent inspection robot is introduced, and the various parts and functions of the robot are analyzed. It introduces the key points of intelligent inspection robot function design to meet the inspection requirements of coal transport corridor. Finally, the application method of intelligent inspection robot is introduced from the aspects of RFID positioning of inspection robot, fault detection and identification of coal transportation corridor inspection, and other aspects, so as to realize intelligent inspection of coal transportation corridor, which is beneficial to improve inspection efficiency and lay a solid foundation for the improvement of coal transportation corridor inspection technology in the future.
Keywords: coal transport corridor;intelligent inspection robot;track system;fire door
輸煤廊道的線路整體較長,且周圍工作環境較差,很容易引發火災。常規輸煤廊道巡檢為人工巡檢,定期檢查廊道設備,通過目測方式判定設備運行工況,導致巡檢效果難免存在遺漏之處,且反復巡檢頻率低,還可能存在盲區。伴隨行業信息化和智能化建設的逐步深入,信息技術和人工智能技術在輸煤廊道巡檢中得到了廣泛應用。設計、生產的智能巡檢機器人,可以負責廊道設備及其他部分的智能化巡檢。下面將圍繞九江公司輸煤系統的智能巡檢機器人的開發、應用展開討論。
1 智能巡檢機器人的組成
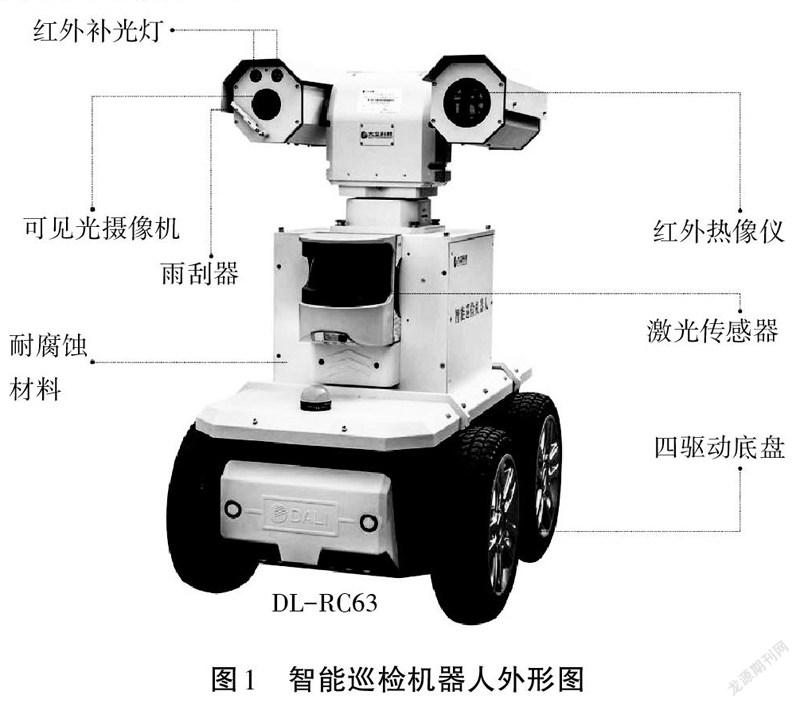
輸煤廊道智能巡檢機器人由軌道系統、巡檢機器人本體系統、充電系統、通信系統、監控后臺系統及在線式圖像識別系統等組成,如圖1所示。其中,軌道系統結合輸煤廊道環境、內部架構及設備布置等,可以進行巡檢機器人軌道系統的設計,設定巡檢路線,繪制軌道安裝圖紙。選擇軌道型材時,優先使用強度高的鋁合金。該材質具有拼接功能,按照隧道地形決定彎曲度、坡度等參數。輸煤廊道設置若干無線基站搭建無線局域網,尤其要將監控后臺接入其中,達到移動監控系統中所有設備相互訪問的效果,從而加強網絡帶寬負載的平衡性[1]。
2 智能巡檢機器人功能設計
九江公司輸煤系統的智能巡檢機器人以定位系統為依據。當它在軌道上行走時,可以在廊道展開全方位的快速巡檢,同時可以上傳視頻。機器人全場行走一次的時間控制在5~8 min。根據廊道智能巡檢機器人的定位分析,可以確定其在巡檢中的精準度[2]。總結智能巡檢機器人功能,包括在惡劣工作環境下的機器人系統可靠性巡檢、圖像/熱像采集與智能分析、機器學習、危險預測告警、故障診斷與控制及多傳感器信息融合等。運行原理如圖2所示。
輸煤廊道智能巡檢機器人內部管控系統,在巡檢過程中若發現設備存在缺陷,將立即智能預警,同時檢測出周圍環境的有害氣體和當時的設備狀態,針對圖像/熱像展開智能識別、大數據分析,采集數據進行遠傳通信、集中遠程管理。系統可以自動無線充電,規避安全障礙,聲音檢測與聲譜分析等。智能巡檢機器人極大地減小了人工巡檢勞動強度,可緩解超過85%的人工巡檢頻率,使得輸煤棧橋運行更加安全,提升運行與運維工作效率[3]。
針對智能巡檢機器人常規功能的設計,如設備狀態智能巡檢,要求智能機器人具備全自主巡檢功能。該功能有常規和特殊巡檢兩種方式。出現異常可以馬上發出預警,將采集到的故障類型信息上傳到監控后臺。設計數據遠傳通信功能時,應用通信設備有利于加強數據傳輸過程的穩定性。巡檢后臺和巡檢機器人可以相互通信。智能巡檢機器人在設計階段運行,需要提前布置好運行軌道。考慮到輸煤廊道環境特點與作業需求,在設計時運用吊裝鋁合金覆膜防蝕軌道,可以保證軌道運行堅固度與防腐蝕效果。在軌道內部設置一體式屏蔽履帶供電、通信線纜總成專用編碼式記步式伺服水平驅動系統。設計參數時,在現場設置200余個預置位巡檢,最大載荷為25 kg。按照上述智能巡檢機器人性能與參數,它可應用于煤礦井上配電室巡檢、運煤皮帶檢測以及輸煤棧道巡檢等場景。根據智能巡檢過程發現,該機器人在輸煤廊道的巡檢工作中運用,具有紅外熱成像、定位巡檢、溫濕度監測、儀表識別、氣體檢測、安防檢測、安防報警、局放檢測以及輔助消防等功能。基于當前輸煤廊道巡檢情況,智能機器人在導航單元、通信單元和主控單元中運用,且運行時間較長,具有智能化和可調配等優勢。若機器人在運行過程中遇到比較復雜的路況,它還具有無死角檢測的功能,適應性極強。可見光攝像儀采集巡檢范圍內的紅外熱像儀,可為工作人員及時發現異常提供依據,通過拍攝圖像與視頻作為參考。另外,智能機器人通過超聲波傳感器識別附近的障礙物,以及時做出處理,避免機器人巡檢時受損。當機器人獲取數據后,聯合氣象站共同處理、分析數據,得到周圍環境的溫濕度、風速等信息,從而為后續智能巡檢機器人在輸煤廊道的運行奠定基礎。
針對智能巡檢機器人特殊功能的設計,有害氣體與粉塵檢測功能必須要及時測定惡劣工作環境下的瓦斯、O2、CO2等氣體,并支持煤粉濃度檢測,營造健康、安全的巡檢環境。紅外測溫功能設計時,巡檢機器人通常會有紅外熱成像儀,可以實現整體掃描式測溫。提前設定好若干監測點,再組織機器人定期監測重點設施運行狀態與溫度,設定每日測溫巡檢時間,自動采集并儲存測溫信息,生成測溫報表。一旦發現超出預警溫度值,系統自動通知維護人員。設備異常聲音檢測功能設計即按照機器人移動平臺相關設備運行狀態下的聲音參數,在巡檢機器人系統軟件中展開頻譜分析,檢查設備是否存在異常響動。安防聯動告警的設計利用機器人搭載可見光攝像頭,具有遠程檢查輸煤廊道的功能。
在遠程操作平臺中,獲得機器人實時傳回的環境溫濕度、機器人運行速度等信息,在發現預警信號后,平臺會自動播放現場影像。測振功能設計為電機運行工況判斷提供了參考。了解輸煤系統大電機振動,巡檢人員應用手持測振儀,智能巡檢機器人上搭載激光測振儀,實現電機振動情況檢測的智能化。設計過程中,設備本體需要有無線振動傳感器,且機器人移動平臺需設置通信基站。如果機器人移動至設備周圍,會自動接收傳感器測量采集的振動數據[4]。
3 智能巡檢機器人應用
3.1 巡檢機器人無線射頻識別(RFID)定位
智能巡檢機器人內部安裝了定位系統,可以自動獲取位置數據。導航系統可支持巡檢機器人基礎構建,此環節應用循跡磁引導的方法。但是,該方法比較復雜,工作量大,不建議在野外巡檢時使用。此次設計的智能巡檢機器人系統應用無線射頻識別(Radio Frequency Identification,RFID)無源電子標簽定位方法,降低了規模化構建難度,可以保證定位精度。帶式輸送機巡檢時可以靈活應用。
3.2 輸煤廊道巡檢故障的檢測與識別
在輸煤廊道巡檢中,應用智能巡檢機器人,利用搭載傳感器、攝像儀器,可以采集巡檢過程中的各項數據,再利用傳感器獲取實時數據,待數據處理后獲取故障信息。智能巡檢機器人采集圖像信息,主要利用攝像機、紅外攝像裝置,可以在各個工況下獲得高清視頻與圖像。其中,攝像機具有放大器功能,增益調節范圍較寬,按照光亮調整圖像輸出信號,得到優質圖像與信息。攝像機拍攝影像時,在背光條件下能夠實現自動補償,加強圖像信號清晰度。通過防抖技術可以避免巡檢時嚴重晃動出現的圖像模糊、跳動等問題。
為了獲取故障音頻,帶式輸送機在常規運行狀態下發出噪聲和異常運行狀態下發出噪聲存在明顯區別[5]。此時,可利用拾音傳感器采集帶式輸送機托輥運行產生的噪聲,再轉換噪聲信息為頻譜信息,并對比儲存的常規頻譜樣本信息得到故障信息后自動發出預警。為了達到輸煤廊道現場巡檢要求,拾音傳感器的采樣頻率在100~20 000 Hz,最高甚至達到了48 kHz,運行溫度范圍是-40~80 ℃。工作人員設置溫度閾值和溫度報警限值,保證超溫報警功能的正常運行。
3.3 其他方面的應用
第一,智能巡檢機器人結構設計為多模塊分體式,采用鏈條形構型,具有良好的通過性。應用模塊化系統提高了配置靈活性和重量分布的平衡性,也為機器人結構檢修提供了方便。第二,圖像識別技術可以及時發現輸煤廊道的故障,如內皮帶跑偏和漏煤等。第三,針對設備運行狀態發出的聲音,系統可以及時進行頻譜分析。第四,編碼器和RFID技術相結合,可以提高機器人的定位精度。第五,根據輸煤廊道所處的環境特征研發吹掃系統,對機器人運行軌道進行自動吹掃,以免巡檢軌道有雜物和塵土。第六,應用軌道結構、機器人雙驅動模式可以提高爬升性能,穿越樓層。第七,利用無線測振傳感器測量關鍵設備的振動數據,且相關數據可利用無線網關上傳到監控系統。
4 結語
綜上所述,輸煤廊道巡檢工作在人工智能的影響下需要朝著智能化方向轉型。應用智能巡檢機器人不僅是行業發展的必然趨勢,也是滿足現場巡檢要求的有效舉措。研發、應用智能巡檢機器人對技術人員要求較高,需要參考輸煤廊道現場環境、巡檢要求等完善機器人功能,提高巡檢數據精準度,判斷現場安全性,為輸煤廊道其他環節的運行奠定基礎。
參考文獻:
[1]高越.輸煤控制系統PLC改造工程[J].中國科技信息,2021(22):47-49.
[2]郭歡.我國管道輸煤技術在工程中的應用介紹與展望[J].山東化工,2021(15):67-68.
[3]盧艷林,李辰.某工程輸煤電動三通控制問題及解決方案分析[J].電力勘測設計,2021(6):37-41.
[4]吳碧野,戴君武,趙曦輝.某火力發電廠輸煤棧橋結構可靠性鑒定[J].低溫建筑技術,2021(5):80-85.
[5]張琨,王旭航,周立群,等.超寬帶定位技術在火電廠輸煤系統應用的試驗研究[J].電力科技與環保,2020(5):54-58.