AGV自動導航智能化計量設備搬運技術研究及應用
2021-03-28 21:21:17李春暉周松濤張謝許梁遠星吳志剛韓衛民
河南科技 2021年32期
關鍵詞:智能化
李春暉 周松濤 張謝許 梁遠星 吳志剛 韓衛民
摘 要:自動導引運輸車(Automated Guided Vehicle,AGV)是指裝備有電磁或光學等自動引導裝置,能夠按規定路線行駛,具備運載、擺放貨物功能的運輸車。為降低人工作業帶來的生命財產安全風險,降低工人勞動強度和出錯率,實現24 h全過程無人作業,設計了一套智能化搬運和自動裝卸貨系統。該系統實現了計量物資配送的無人化管理,提高了作業效率。
關鍵詞:自動導引運輸車(AGV);智能化;無人化;計量物資配送
中圖分類號:TP242 文獻標識碼:A 文章編號:1003-5168(2021)32-0047-04
Research and Application of AGV Automatic Navigation and Intelligent Metering Equipment Handling Technology
LI Chunhui ZHOU Songtao ZHANG Xiexu LIANG Yuanxing WU Zhigang HAN Weimin
(Guangzhou Power Supply Bureau of Guangdong Power Grid Co., Ltd, Guangzhou Guangdong 510000)
Abstract: AGV refers to a transport vehicle equipped with electromagnetic or optical automatic guidance devices, which can drive along the specified route and carry and place goods. To reduce the safety risk of life and property in manual operation; decrease the labor intensity and error rate of workers; A set of intelligent handling and automatic loading and unloading system which can realize 24-hour unmanned operation in the whole process is designed. The system realizes the unmanned management of metering material distribution and improves the operation efficiency.
Keywords: Automated Guided Vehicle(AGV);intellectualization;unmanned;metering material distribution
本文提出利用自動導引運輸車(Automated Guided Vehicle,AGV)、托車器、升降平臺、自動拆碼垛及接駁線等設備,配上一整套的軟件處理系統進行統一調度運行,讓出入庫線體與配送車輛之間的物資轉移徹底實現物資配送智能無人化[1-3]。
廣東電網計量中心計量物資的配送過程中,中心庫的庫前區一直都沒有徹底實現自動化。在自動倉儲、自動揀選以及自動包裝技術得到越來越多的應用后,如何更大程度加快月臺的運轉效率成為很多倉庫管理人員關心的問題[4]。自動裝卸系統自動裝卸貨的實施,將滿足作業效率提高的需求,降低人員勞動強度,同時縮短貨車在月臺的停留時間,為員工和產品創造了更安全的環境[5]。
國家電網公司和南方電網公司的計量資產配送已經實現了庫內智能化無人化操作,但是在出庫口一直使用人工搬運,工人將計量資產一箱一箱從配送車廂搬運到入庫流水線上進行入庫或者從流水線搬運到配送車廂進行配送。這種方式工人勞動強度高,配送效率低,無法滿足省級出入庫效率要求[6]。為解決這個問題,研發了一套自動裝卸貨系統,整合使用自動導引運輸車(Automated Guided Vehicle,AGV)、托車器、自動拆碼垛機、接駁線等設備,一次可搬運計量物資1~60箱,且無需人工參與,提升了配送效率,降低了人員成本和人員勞動強度。
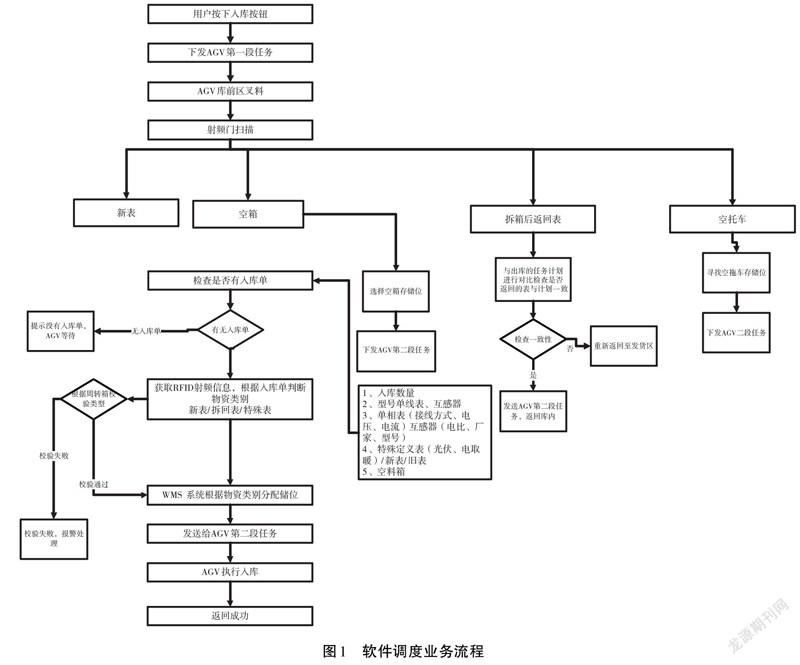
1 軟件調度系統流程
入庫時,配送車輛到達月臺即發送信號到調度中心,調度中心給各個設備下達啟動指令。托車器打開升起支撐車廂,升降平臺升起對接車輛車廂,AGV規劃路線并通過升降平臺進入車廂叉取計量物資轉移到自動拆碼垛機上,自動拆碼垛機接收到信號,將物資拆垛轉移到入庫接駁線上,進行入庫。
出庫時,庫房倉庫管理系統(Warehouse Management System,WMS)下發信號給調度中心,調度中心再給各個設備下達啟動指令。出庫物資通過接駁線到達自動拆碼垛機,拆碼垛機將物資進行碼垛,托車器打開升起支撐車廂,升降平臺升起對接車輛車廂。AGV規劃路線并通過升降平臺將堆垛好的計量物資轉移到配送車輛車廂內,完成出庫。具體軟件調度系統流程如圖1所示。
2 AGV自動導航車
AGV車是智能化搬運流程中最重要的一環,是智能無人操控的核心[7]。本設備具有高度智能化特點,能夠自動充電,接收信號后自動規劃路線運行,搬運指定物資到指定的位置并智能避障[8],待工作完成后自動歸位,可完全替代人工完成搬運工作。AGV可一次性轉移質量為1 t的物資,且用時不超過10 min,遠遠高于人工配送效率。
基于自然輪廓SLAM導航技術[9],采用激光掃描生成現場環境地圖,結合末端反射板激光混合導航技術,獲得AGV和車廂之間的相對定位與導航坐標,實現直行、轉彎、分線左右擺差±10 mm及末端定位±5 mm的高精度,進而實現AGV精準取放貨。比對導航激光掃描生成的輪廓測距數據與傳感器采集的實時數據,反復糾偏調整AGV姿態,才能使其準確進入車廂,叉取指定計量物資。
AGV導航車的設計考慮到如下功能。
①AGV小車自動充電功能。配有獨立的充電裝置和充電停車位,可實現自動充電,AGV在空閑時或設備欠電時會自動歸位充電。
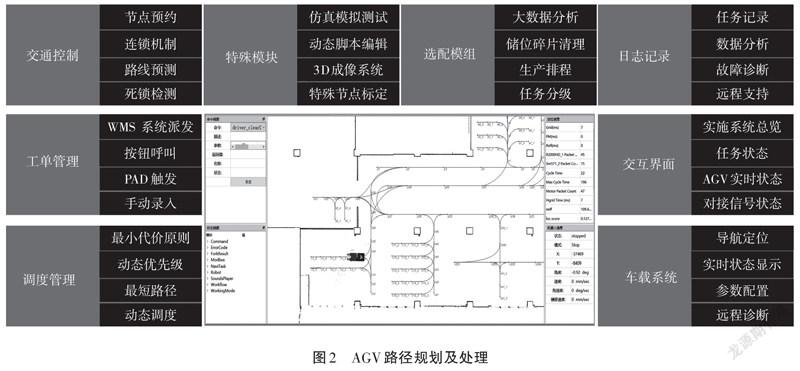
②AGV調度系統包含AGV小車工作狀態和工作地圖、行車軌跡等功能界面,可直觀監控運行過程,且具備障礙物檢測及其他安全防護功能。規劃AGV行駛路徑時,AGV協作合理,滿足效率需求。AGV路徑規劃和處理如圖2所示。
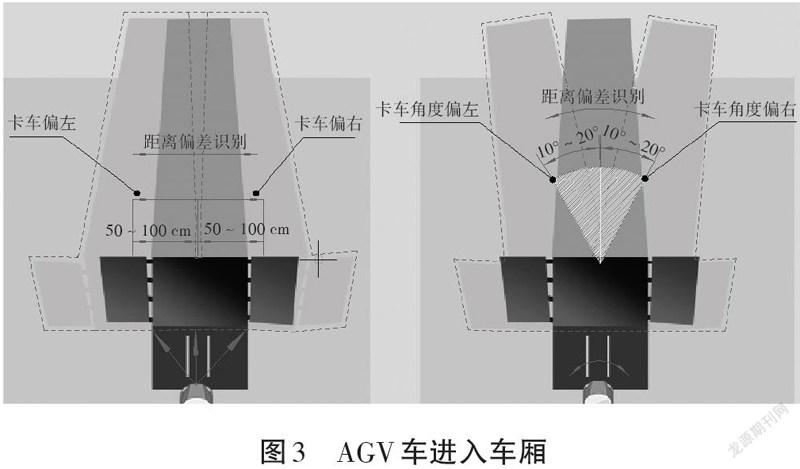
③AGV進入車廂內部后,具備車廂內部人體影像自動識別與退出車廂停機報警功能。AGV進入車廂內部,具備自動判別車廂內部空間長度和自動裝卸貨到達車廂底部最后一排的功能。AGV通過自帶的掃描裝置和視覺識別裝置,調節AGV車的俯仰角、偏移角及入廂深度等,到達取貨位置。圖3為AGV進入車廂后的工作示意圖。
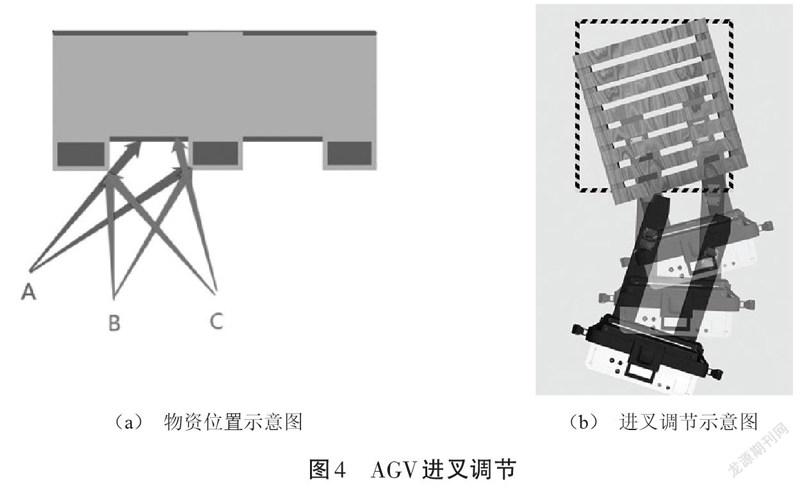
④AGV到達取貨位置后,掃描貨物狀態,根據貨物位置微調叉車方向和坐標位置,引導叉齒順利進入物資托盤插孔,并抬升轉移物資。AGV根據激光掃描反饋,確定自身相對于物資的位置(A、B、C位置),調節自身位置。當叉齒正對物資插孔時,進入物資托盤底部,如圖4所示。
AGV導航車采用國內外先進技術和產品,適應技術發展需求,能在更狹小的空間進行作業,采用標準化設計,操作步驟簡單,易于維修。設計時既考慮了實用性,又兼顧了經濟性,具有較高的性價比。
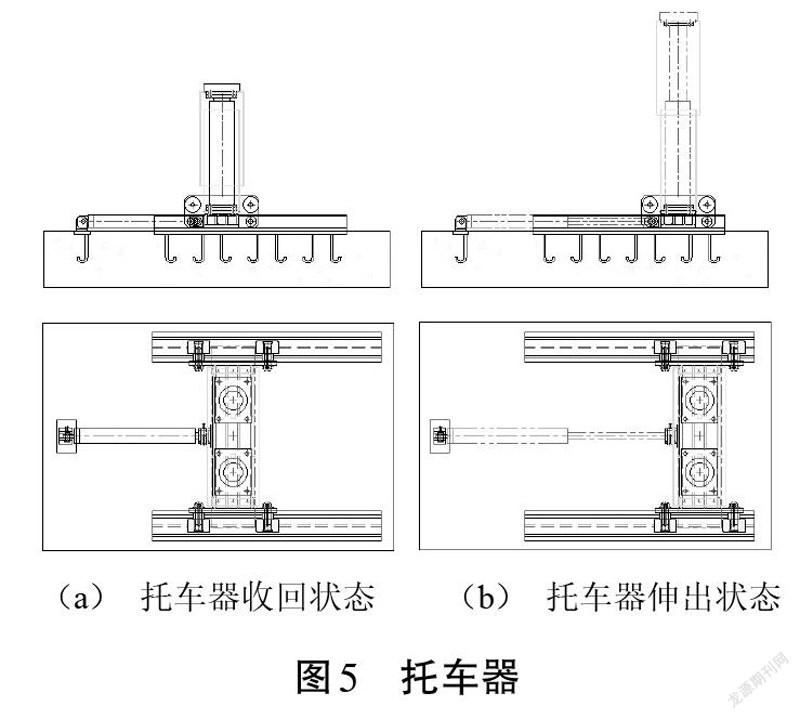
3 托車器與升降平臺
智能化搬運的主要設備是AGV車,但AGV車本身,自重在2 t左右,進入車廂取貨放貨時會壓低車廂,使得車廂與月臺的升降平臺對接時出現高度差,最終導致AGV不能順利行走。使用托車器托起車廂,讓其始終停留在同一高度,升降平臺升起對接后,車廂與升降平臺始終保持同一高度,此時AGV就可以順利上下車,具體過程見圖5。配送車到達月臺后,托車器升起托住車廂,同時將車廂高度信息反饋給調度平臺,調度平臺將信息傳給升降平臺。AGV車登上升降平臺后,平臺即可進行升降運動,到達車廂高度,完成對接,使AGV在車廂與升降平臺之間順利行走。
托車器頂升額定載荷(承載力等于油缸截面乘于壓力值)計算公式如下:
F=πr×P=π×60×60×13
=146.952? N≈14.995? t>2T (1)
式中:F為載荷;r為油缸半徑;P為滿載壓力;T為車輛滿載時車廂及貨物質量之和。
4 自動拆碼垛機
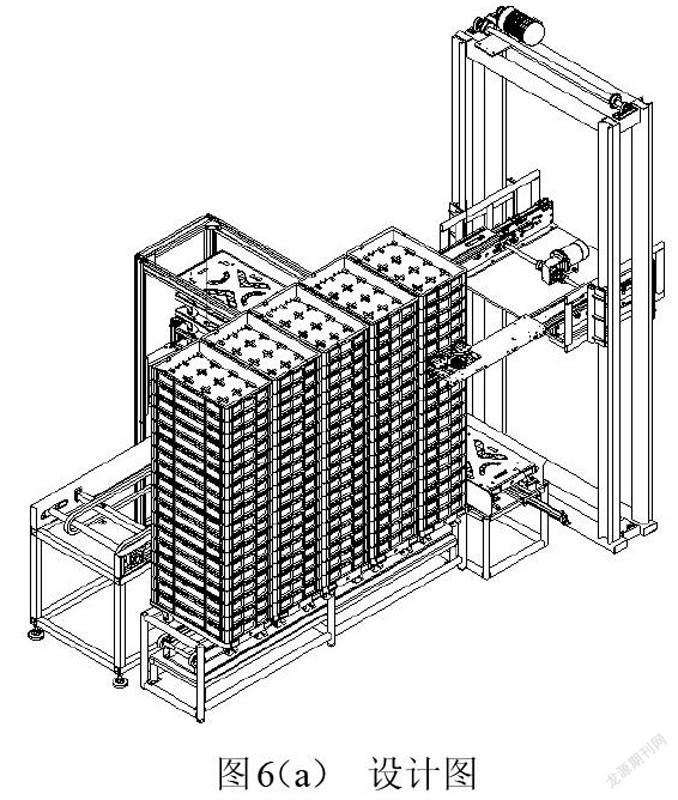
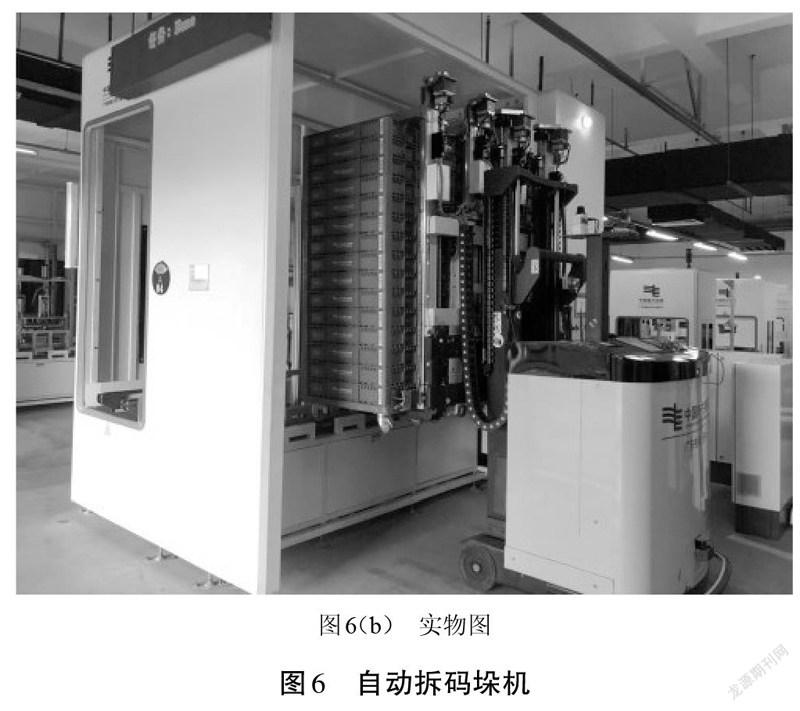
AGV車搬運的物資基本上是18箱/9箱一垛(這樣的高度與車廂內部高度接近,不會浪費運輸空間,節約物流成本),但是庫房入庫基本上是5箱/3箱一垛,因此AGV搬運的物資在入庫時必須拆垛,出庫時必須碼垛,才能真正意義上實現智能無人化搬運配送[10]。本自動拆碼垛機(如圖6所示)在出庫時自動識別物資數量,將接駁線上的物資碼垛后放置在AGV工作位置上。入庫時,自動拆碼垛機自動識別物資數量,將AGV搬運過來的貨物拆垛并轉移到入庫接駁線上,無須人工干預操作。
5 結語
本套智能化搬運設備整合了多項技術,開發了一整套的調度系統,以智能導航AGV車為依托,整體調度托車器、升降平臺、自動拆碼垛機及智能導航AGV車,在庫前區實現計量物資的智能化、無人化配送,完成物資配送的全無人化管理。
參考文獻:
[1]葉學根.AGV智能機器人停車庫的應用[J].智能建筑與智慧城市,2021(2):113-114.
[2]張榮杰.自動導航車輛的任務Petri網控制系統設計[D].泉州:華僑大學,2020:1-137.
[3]李明,高瞻,張吉,等.面向復雜倉儲場景的電力物資出入庫策略管理[J].物流技術,2021(4):13-17.
[4]曹瑞劍.電力企業物資倉儲物流管理探討[J].中國物流與采購,2021(3):69.
[5]江宏.自動裝卸系統在汽車行業的規劃與應用[J].物流技術與應用,2020(8):108-109.
[6]王建新,房金良,謝文才,等.智能化無人值守庫房管理系統開發及應用[J].汽車制造業,2021(3):42-44.
[7]唐先軍,李國臣,陳俊超.試析智能化的物流搬運AGV機器人[J].科技創新導報,2020(4):94-96.
[8]王冠博,趙一帆,郭嘉.循跡避障智能小車的實驗設計[J].實驗科學與技術,2021(5):38-42.
[9]張開樂,陳興文.基于激光SLAM實現AGV自主導航技術的仿真[J].山西電子技術,2021(5):32-34.
[10]李永梅,劉金剛,馬鎰明.碼垛機器人控制系統研究[J].工業控制計算機,2021(11):58-60.
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年13期)2021-07-28 07:14:34
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國儲運(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25