基于復諧和激勵的貨車振動響應分析*
2021-03-28 14:23:00秦玉英趙梓杉曹俊杰孟曉滿祝嘉龍
汽車工程師 2021年1期
秦玉英 趙梓杉 曹俊杰 孟曉滿 祝嘉龍
(遼寧工業大學)
貨車是運送貨物的重要交通工具,為了保護貨物的完整性和降低駕駛員的旅途疲勞,貨車的行駛平順性能非常重要,因此,貨車行駛中的振動分析必不可少。虛擬激勵法在汽車振動分析中應用較多,多數是以系統的頻率響應函數為橋梁[1-2]的虛擬激勵下,求取系統的虛擬響應。模態分析方法,對于線性阻尼系統,在復諧和激勵作用下,已經給出響應的一般公式[3-4],方法的核心就在于構造的虛擬激勵就是復諧和激勵,文章以貨車七自由度模型為例,將虛擬激勵法和復模態分析方法相結合,給出了貨車振動響應分析方法。
1 汽車七自由度模型的建立
貨車七自由度的力學模型,如圖1所示。
由拉格朗日方程建立汽車七自由度結構系統的數學模型為:

其中:{z}={z1,z4,z6,φ2,θ3,φ5,φ7}T、{q}={q1,q2,q3,q4}T、。
式中:[m],[c],[k]——質量矩陣、阻尼矩陣、剛度矩陣;
[kf]——右端與路面激勵對應的矩陣;
{z}——位移向量;
[m]——路面激勵向量。
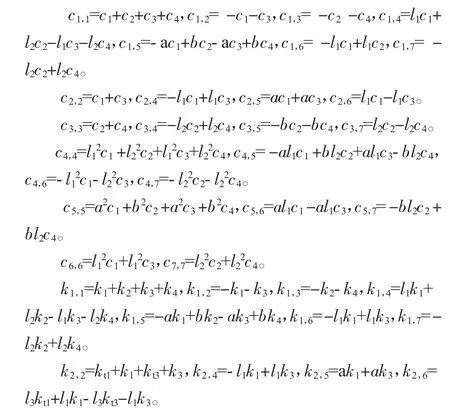
由于[c]和[k]都是對稱矩陣,均給出上三角元素,下角標分別表示該元素所在的行與列位置:

圖1 貨車七自由度結構系統力學模型

2 虛擬四輪路面激勵
如圖1所示,四輪汽車的路面激勵功率譜密度矩陣Sq(f)為[5]:

式中:coh(f)——左右車輪的輪跡之間的相干函數;
Gq(f)——時間頻率內的路面激勵的位移譜密度;
τ——前后車輪受到路面激勵的時間差,τ=(a+b)/u。
將路面激勵功率譜密度矩陣進行分解,其中不為0的2個特征值λ1和λ2及其對應的單位特征向量{ψ}2為:


3 振動響應分析
3.1 復模態求解
式(1)對應的特征方程為:

對應于任意一個特征值λr,與之相對應的特征向量為ur,λr和ur滿足:

引入復模態變換:

其中:{z(t)}={z1,z2,…,z2n}T。

其中:[u]=[u1u2…u2n]n×2n,[λ]=diag(λr)。式中:U——復特征向量。
貨車七自由度模型在式(7)的復諧和激勵作用下,每個自由度穩定的響應,即虛擬響應為:

式中:ω——角頻率,rad/s。
3.2 響應量的統計特性
從式(12)中,提取與車身處垂直位移z1對應的虛擬位移,則車身垂直加速度的功率譜密度Gz¨1(f)為:

車身垂直加速度的均方根值σr為:

式中:f1,f2——頻率的下限、上限。
3.3 應用實例
選取某貨車為仿真對象,參數為:m1=7 885 kg,J2=3 195 kg·m2,I3=32 432 kg·m2,m4=480 kg,J5=295 kg·m2,m6=945 kg,J7=470 kg·m2,c1=c3=7 000 Nsm-1,c2=c4=14 000 Nsm-1,kt1=kt3=950 000 Nm-1,kt2=kt4=1 900 000 Nm-1,k1=k3=170 000 Nm-1,k2=k4=480 000 Nm-1,a=3 m,b=1.1 m,2l1=0.83 m,2l2=1.04 m,2l3=1.8 m,2l4=1.8 m。
汽車以不同車速行駛在b級路面上,頻率范圍f=0.3~30 Hz,車身垂直加速度的功率譜曲線,如圖2所示。

圖2 人體垂直加速度的功率譜密度曲線
從圖2可以看出,大約在車身固有頻率1.9 Hz處,功率譜取得最大值。隨著車速的增加,車身垂直加速度的功率譜均在增加,表明該車的行駛平順性能隨著車速的增加而變差,將會影響乘員乘坐舒適性和貨物的完整性。由于貨車振動的固有頻率范圍大約在2 Hz左右,從圖2的峰值點可知,本方法可行。
人體垂直加速度均方根值,如圖3所示。隨著路面等級的下降,人體垂直加速度的均方根值在增大。在A級路面,人的主觀感覺均在舒適范圍之內。在B級路面,隨著車速的提高,舒適性變差。在C級路面,人的主觀感覺均很不舒適,嚴重影響貨物的完整性。

圖3 人體垂直加速度均方根值
4 結論
文章介紹了在復諧和激勵下,復模態分析方法的一般響應公式,和虛擬激勵法結合,構造了具有復諧和激勵特點的虛擬四輪路面激勵,給出了虛擬激勵下的復模態的求解方法。并利用虛擬激勵法求取功率譜密度的方法,給出了貨車七自由度的振動響應分析,方法簡單可行。另外,本方法也為不必求取系統的頻率響應函數,就可求取響應的統計特性提供了方法。由于文中貨車懸掛參數是定值,但實際參數是非線性變化的,可采用分段線性化進行處理,文章中分析貨車的振動響應方法,依然可行。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2016年2期)2016-03-22 02:42:52
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39
