基于Mworks的坦克隨動系統建模與仿真研究
2021-03-29 01:02:38袁樹森鄧文翔姚建勇楊國來
彈道學報 2021年1期
袁樹森,鄧文翔,2,姚建勇,楊國來
(1.南京理工大學 機械工程學院,江蘇 南京 210094;2.浙江大學 流體動力與機電系統國家重點實驗室,浙江 杭州 310027)
為了適應當前戰爭的需求,高質量、高穩定性、高精確性的坦克炮在我國軍事體系中占據著不可替代的作用。坦克隨動系統是整個坦克炮的關鍵組成部分,主要用于實現坦克炮方位和俯仰姿態調轉及隨動跟蹤,同時在坦克行進狀態中,隨動系統也是保證在坦克行進間炮塔和坦克炮穩定的關鍵因素。
近年來,關于坦克隨動系統建模與仿真分析的研究水平不斷提高。文獻[1]在建立坦克火炮系統動力學模型的基礎上,對擾動力矩的作用機理和影響因素等方面進行深入分析,建立了火炮擾動力矩譜測試系統,并通過實車試驗對所建系統的有效性進行了相關驗證。文獻[2]論述了火炮隨動伺服控制系統響應頻率參數對隨動伺服控制系統設計的重要意義,并通過實例給出了伺服控制系統響應頻率的相關公式及詳細計算方法。文獻[3]在繼承和分析傳統炮控系統的基礎上,對坦克高低向和水平向炮控系統進行了對比和統一,簡化了炮控系統處理的對象,建立了飽和炮控系統的數學模型,對炮控系統中的摩擦、干擾、噪聲等因素進行了分析和仿真,設計出了基于Kalman濾波器的PID炮控系統。文獻[4]從坦克炮控系統的結構入手,分析了系統內部各種非線性因素,建立了包含各種非線性因素的炮控系統數學模型,分析了系統的性能要求,開展了炮控系統的穩定狀態性能分析。文獻[5]指出了現裝備坦克炮控系統存在的主要問題,介紹了交流全電坦克炮控系統的總體方案,分析了交流全電炮控系統對提高坦克火控系統射擊精度,縮短系統反應時間等的重大影響。文獻[6]在設計中建立了自行高炮隨動系統的動態數學模型,采用頻率特性法與Matlab仿真設計手段相結合的方法,設計了系統校正環節,使系統具備很好的跟蹤精度和快速反應能力,并具有較強的魯棒性。文獻[7]基于多體動力學的剛柔耦合及接觸碰撞算法,建立了考慮多個結構非線性因素的坦克行進間剛柔耦合多體系統動力學模型。結合優化設計理論和方法,建立了坦克行進間射擊炮口振動優化模型。文獻[8]首次采用Denavit-Hartenberg方法建立了炮控系統的連體坐標系,采用近似線性化方法對炮塔-火炮軸間耦合非線性系統進行線性處理,并通過經典的PD控制方法對系統的穩定性能進行驗證。文獻[9]針對坦克炮塔-火炮系統提出火力線任務空間控制方法,有效解決炮塔-火炮軸間耦合PD控制策略存在的問題,通過仿真分析,驗證了所提方法的有效性。
本文基于Mworks軟件平臺,建立了包括坦克隨動系統的軸間耦合負載非線性動力學模型、方位子系統驅動端動力學模型和俯仰子系統驅動端動力學模型的坦克隨動系統綜合動力學模型。同時針對坦克隨動系統非線性機理復雜、形式多樣的特點,考慮了坦克隨動系統兩軸耦合間結構柔性非線性、執行機構摩擦非線性、機構連接間隙非線性等多個非線性因素的影響,設計了坦克隨動系統軸間耦合PID控制器,對坦克隨動系統的動態特性和綜合性能進行分析優化。仿真分析結果表明了所設計的控制器參數能使系統的動態響應、穩態精度達到一定的要求,符合坦克隨動系統的實際工作指標,驗證了本文坦克隨動系統建模的準確性和有效性。
1 Mworks介紹
隨著機電產品日趨復雜,傳統的單領域建模仿真工具被逐漸淘汰。工業生產中對現代復雜工程系統整體性能分析不斷深入與優化,各領域子系統的簡單集成已無法滿足多領域耦合系統的設計理念。MWorks基于Modelica語言,是新一代多領域物理系統建模、仿真、分析與優化的通用CAE平臺[10]。Modelica語言繼承了先前多種領域建模語言的優點,融合了Java語言的面向對象機制與Matlab的數組表達機制。
Mworks軟件的主要特點如下:①Mworks集多工程領域的系統建模與仿真一體化,多工程領域子模型可以在同一個模型中相互融合、相互作用;②系統采用內置DAE求解器進行求解運算;③在圖形化建模方面,每段仿真過程均可由3D動畫以及變化曲線呈現,可自由實現動畫控制與視圖操作相互切換;④MWorks可以與其他通用軟件兼容,計算效率高[11]。
2 坦克隨動系統非線性建模
坦克隨動系統在坦克行進間射擊的主要作用體現在以下兩方面:坦克行進間坦克炮身管的角度瞄準;角度瞄準后使坦克炮保持穩定狀態,以提高首發命中率。坦克炮管在坦克行進射擊過程中的運動分為水平方向和高低方向。坦克隨動系統模型如圖1所示。
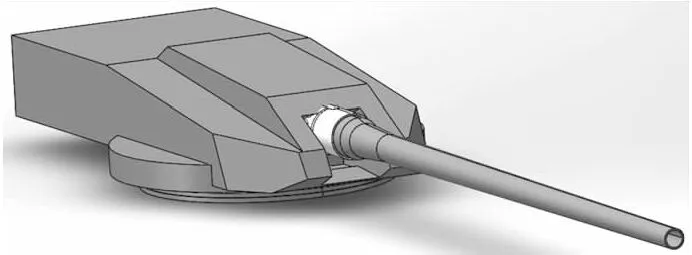
圖1 坦克隨動系統模型
將坦克隨動系統水平方向的控制系統稱為方位子系統,方位子系統主要控制坦克炮塔的角度跟蹤;將坦克隨動系統高低方向的控制系統稱為俯仰子系統,俯仰子系統主要控制坦克炮管的角度跟蹤。坦克隨動系統控制器根據火控系統提供的目標指令,分別獲取打擊目標水平方向的位移信息和高低方向的位移信息,以控制方位子系統坦克炮塔水平方向的運動和俯仰子系統坦克炮高低方向的運動。
2.1 坦克隨動系統軸間耦合負載非線性動力學數學模型
考慮到坦克整車系統建模和控制的復雜性,基于文獻[12],坦克隨動系統方位子系統和俯仰子系統兩軸耦合系統簡圖如圖2所示,坦克隨動系統的兩軸耦合結構特性與其行進射擊過程中的方位向運動特征和高低向運動特征均通過圖2描述,圖中,O0x0y0z0為坦克車體慣性坐標系,O1x1y1z1為坦克炮塔連體坐標系,O2x2y2z2為坦克炮連體坐標系,O3x3y3z3為坦克炮口坐標系。以坦克車體作為坦克隨動系統的發射平臺,用俯仰子系統中坦克炮身管和方位子系統中坦克炮塔的角度變化描述坦克炮身管在坦克隨動系統工作空間下的位置指向。
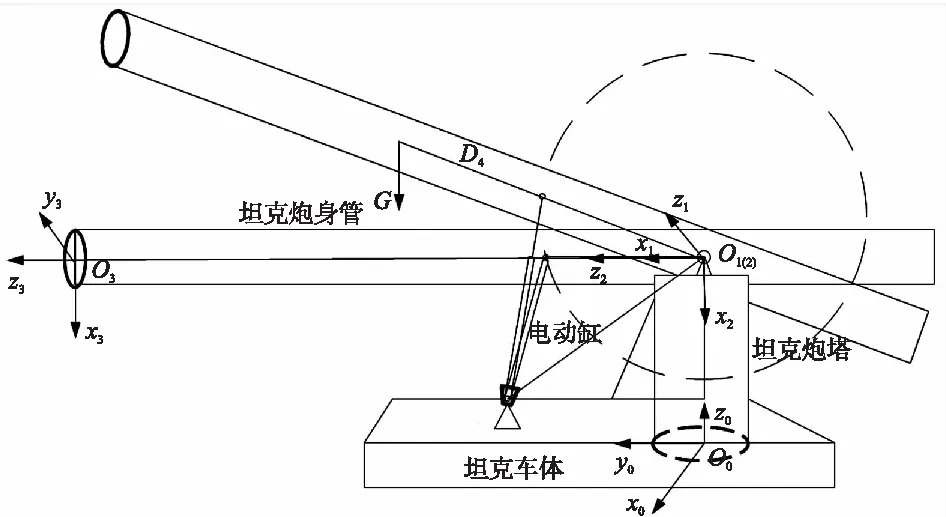
圖2 坦克隨動系統兩軸耦合系統簡圖
文獻[13]根據傳統的機器人建模技術,推導出坦克隨動系統的動力學模型。為簡化動力學分析,坦克隨動系統實際只有2個運動副,即坦克炮管是固定長度的連桿,這與兩連桿機械臂的模型十分相似。基于此,可根據拉格朗日動力學方程建立完整的坦克隨動系統的動態模型。為使建模推導過程簡明清晰,坦克隨動系統中的坦克炮塔(方位子系統)以部件1指代,坦克炮(俯仰子系統)以部件2指代,定義符號下標j=1,2,分別指代坦克炮塔和坦克炮部分相關參量。
定義Γj為部件j關于連體坐標系Ojxjyjzj的3×3慣性張量矩陣:
(1)
式中:Ixxj,Iyyj,Izzj分別為部件j關于x軸、y軸、z軸的轉動慣量;Ixyj,Ixzj,Iyxj,Iyzj,Izxj,Izyj為部件j的慣性積。

(2)
式中:W為坦克隨動系統的廣義質量矩陣,為2×2正定對稱矩陣,其表達式為
(3)
將式(3)代入如下拉格朗日動力學方程,并假設不計部件運動時摩擦產生的影響,則有:
(4)
(5)
基于式(5),定義2×2矩陣:
(6)
因此可知:
(7)
將式(6)和式(7)代入式(5),可進一步簡化坦克隨動系統動力學方程:
(8)
將坦克隨動系統方位子系統和俯仰子系統相關質量和幾何參數展開,則
(9)

坦克隨動系統的動力學模型建立如下:
(10)
2.2 方位子系統驅動端數學模型
坦克方位子系統主要控制炮塔水平方向的運動,采用電機作為動力源,電機經過減速箱直接驅動炮塔齒圏,齒圈與炮塔連接,齒圈運動帶動炮塔旋轉,保證了坦克方位子系統水平方向的運動。
方位子系統主要由功率變換器、炮塔電機、電流傳感器、方向機、水平向巧螺儀和水平向控制器等部分組成[15]。
考慮方位子系統驅動端摩擦特性及未建模的擾動,方位向的負載端力矩平衡方程可寫為
(11)
由于坦克方位子系統采用伺服電機經減速器的形式進行傳動,不可避免地存在傳動間隙與結構柔性的問題,因此方位子系統力矩平衡方程為
Mm1=G1[φ(qm1/n1)-q1]
(12)
式中:φ(qm1/n1)為描述傳動間隙的函數,n1為方位子系統電機的減速比;G1為傳動軸的剛度系數;qm1為方位子系統電機端輸出的角度。
由于摩擦特性對方位子系統的低速性能影響較大,為更加精確地描述真實的摩擦行為,采用如下的連續非線性摩擦模型:
(13)

方位子系統伺服電機電壓平衡方程:
(14)
方位子系統伺服電機轉子力矩平衡方程:
(15)



圖3 基于驅動器速度閉環的方位子系統驅動端模型
圖3中Gpp1(s)為位置控制器,Gpv1(s)為速度控制器,Gpc1(s)為電流控制器,ki1為力矩系數,ke1為反電勢系數,n1為減速器速比,bp1為速度環穩態增益。
2.3 俯仰子系統驅動端數學模型
坦克俯仰子系統主要控制坦克炮高低方向的運動,俯仰子系統主要由功率變換器、伺服電機、滾珠絲杠、電流傳感器、高低向巧螺儀和高低向控制器等部分組成[15]。
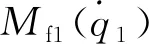
俯仰子系統運動學示意簡圖如圖4所示,圖中,O為坦克炮耳軸,O1為電動缸下支點,O2為電動缸上支點;D1為坦克炮耳軸到電動缸下支點的垂直距離,D2為坦克炮耳軸到電動缸下支點的水平距離,D3為火炮耳軸到電動缸上支點的距離,D4為坦克炮耳軸到身管質心的距離;xp0為電動缸初始的長度,xp1為電動缸調整炮角后的長度(即點O1與點O21之間的長度),Δx為電動缸活塞推桿位移。俯仰系統在建模上與方位子系統不同之處在于電動缸的建模。由于電動缸具有響應快、傳動效率高、易于維護、壽命長等特點,電動缸作為動力源成為我國全電式坦克的一個很重要的組成部分。電動缸內部采用齒輪減速器、滾珠絲杠進行傳動,將直線運動轉換為坦克炮身管的旋轉運動。
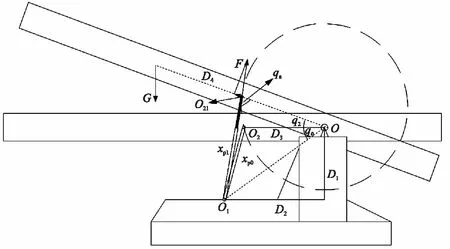
圖4 坦克俯仰子系統運動學示意簡圖
考慮俯仰子系統驅動端摩擦特性及未建模的擾動,俯仰子系統高低向的負載端力矩平衡方程可寫為
(16)
式中:M2為坦克俯仰子系統負載端的驅動力矩,F為電動缸輸出推力,qa為電動缸出桿力和身管軸線的夾角,q2為坦克炮的俯仰角,m2為方位子系統坦克炮身管的質量,d2(t)為俯仰子系統中未建模的擾動,俯仰子系統的摩擦力矩為
(17)
由圖4,根據三角函數關系分析可知:
與方位子系統類似,俯仰子系統伺服電機電壓平衡方程為
(18)
俯仰子系統伺服電機轉子力矩平衡方程:
(19)
坦克俯仰系統亦存在傳動間隙與結構柔性的問題,因此,
Mm2=G2[φ(qm2/n2)-q2]
(20)
式中:Mm2為考慮傳動軸柔性后,俯仰子系統電機傳動軸末端的力矩。
由文獻[16]可知,滾珠絲桿的輸出推力與轉矩的關系式為
(21)
式中:l為滾珠絲杠導長,η為絲杠機械效率。


圖5 基于驅動器速度閉環的俯仰子系統驅動端模型
3 基于Mworks的系統建模及仿真
3.1 坦克隨動系統軸間耦合負載非線性動力學建模
根據式(10),基于Mworks建立坦克隨動系統軸間耦合負載非線性動力學模型,如圖6所示。控制輸入U1,U2,對應建立的坦克隨動系統軸間耦合負載非線性動力學模型中的驅動力矩M1和M2。
圖6 基于Mworks坦克隨動系統軸間耦合負載非線性動力學模型
3.2 方位子系統驅動端建模
根據方位子系統伺服電機電壓平衡方程和方位子系統伺服電機轉子力矩平衡方程,基于Mworks建立方位子系統驅動端模型,如圖7所示。
方位子系統驅動端模型以驅動器驅動伺服電機的形式完成伺服控制功能,驅動器內部配置在速度環,U11為方位指令輸入端,Mt1為輸入到坦克方位子系統負載端的驅動力矩,U12為動力學模型位置輸出端反饋信號。
3.3 俯仰子系統驅動端建模
俯仰子系統驅動端建立的模型與方位子系統區別在于俯仰子系統以電機驅動滾珠絲杠的伸縮,將滾珠絲杠的直線運動轉換成俯仰子系統高低向的旋轉運動,存在較強的非線性特性。根據俯仰子系統驅動端數學模型,建立如圖8所示俯仰子系統驅動端模型輸入與輸出接口。
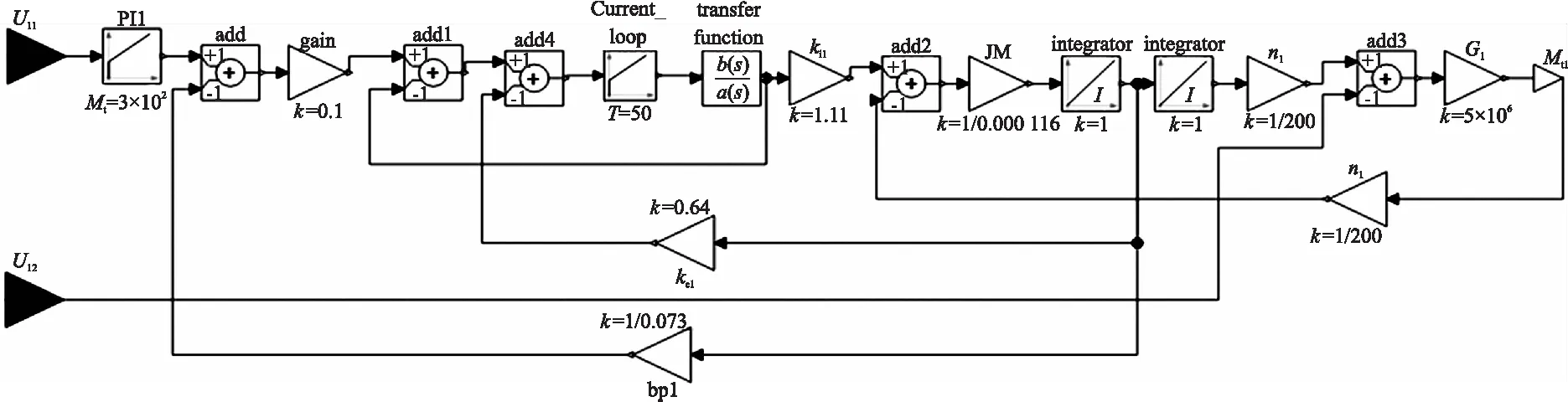
圖7 基于Mworksr的方位子系統驅動端模型
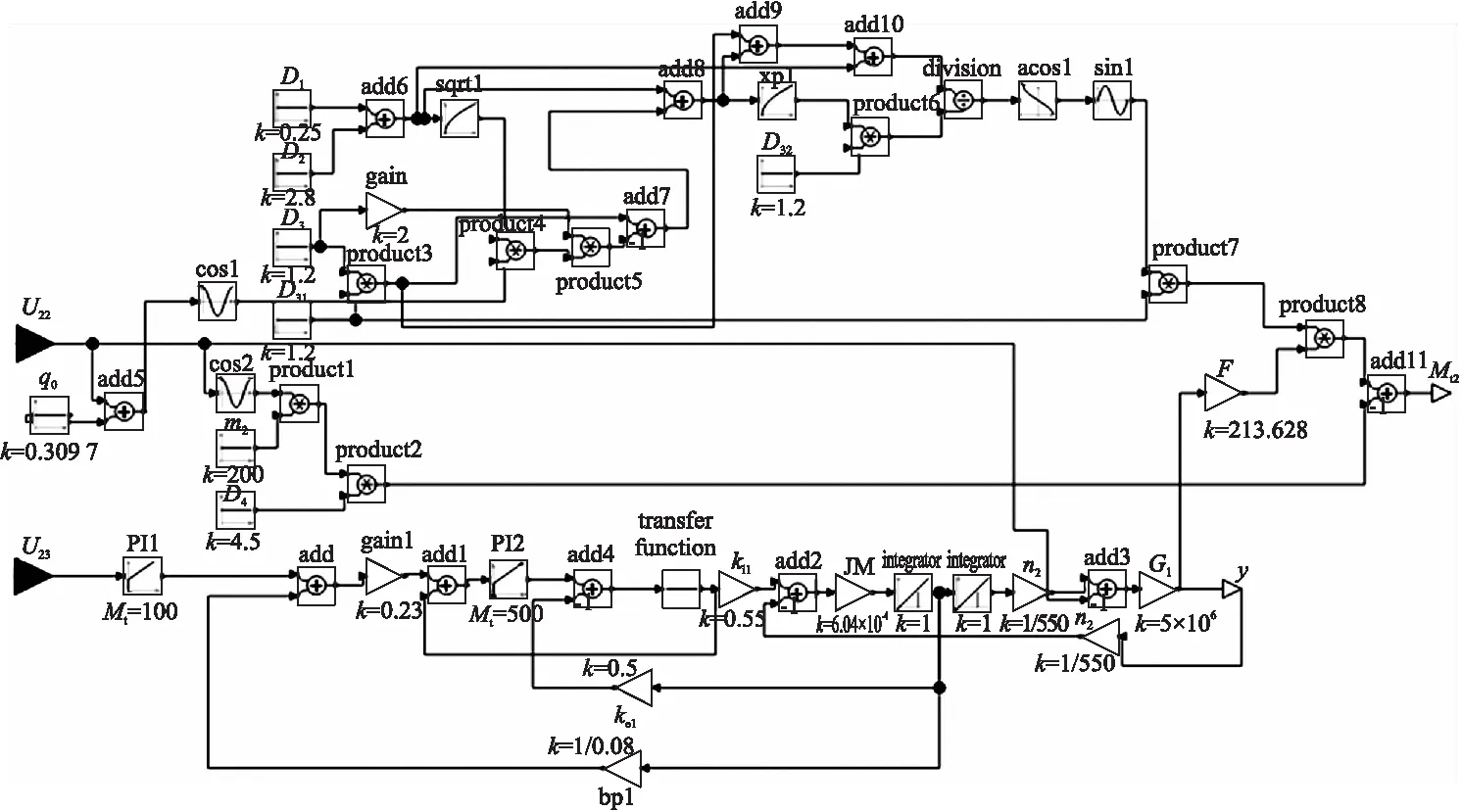
圖8 基于Mworks的俯仰子系統驅動端模型
3.4 坦克隨動系統仿真分析
為驗證本文基于Mworks建立的坦克隨動系統動態性能的準確性和穩定性,將基于Mworks建立的坦克隨動系統軸間耦合負載非線性動力學模塊、方位子系統驅動端模塊、俯仰子系統驅動端模塊進行封裝組合,形成坦克隨動系統模型庫,并基于Mworks設計了方位子系統和俯仰子系統軸間耦合PID控制器。基于Mworks的坦克隨動系統仿真模型如圖9所示。
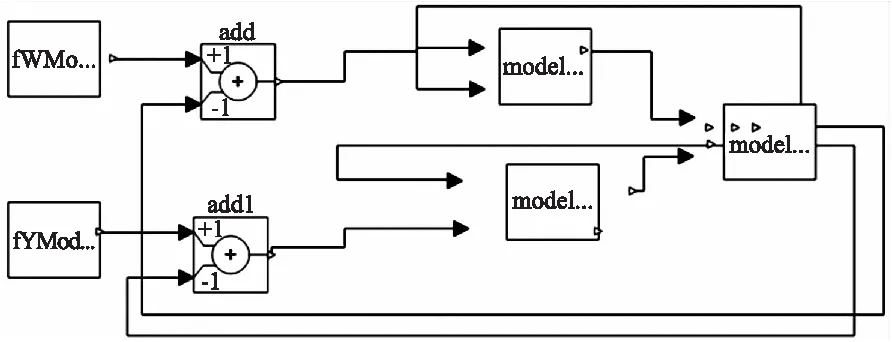
圖9 基于Mworks的坦克隨動系統仿真模型
坦克隨動系統軸間耦合負載非線性動力學模型部分參數[16]如下:Ixx2=5 400 kg·m2,Iyy1=2 547 kg·m2,Iyy2=5 343 kg·m2,Izz2=224 kg·m2,Ixy2=-2.8 kg·m2,Iyz2=13.7 kg·m2,Izx2=0.8 kg·m2,h1=0.6 m,h3=5 m。方位子系統驅動端模型部分參數如下:Lm1=0.05 H,Rm1=2.6 Ω,ku1=1.11 N·m/A,Jm1=1.16×10-4kg·m2,Ge1=5×106N/m,n1=200,ke1=0.64 V·s/rad;俯仰子系統驅動端模型部分參數如下:Lm2=0.010 7 H,Rm2=1.93 Ω,ku2=0.55 N·m/A,Jm2=6.04×10-4kg·m2,n2=550,ke2=0.5 V·s/rad,Ge2=5×106N/m,D1=0.5 m,D2=2.8 m,D3=1.2 m,D4=4.5 m,l=0.025 m,m2=200 kg,η=0.85。
瞄準目標時坦克隨動系統的方位角度指令信號為
俯仰角度指令信號為
式中:坦克炮炮口圓軌跡半徑r=1 m,坦克炮炮口圓軌跡與水平面夾角ξ=arctan(R/h3),仿真中采樣周期設置為0.001 s。
基于Mworks設計了方位子系統和俯仰子系統軸間耦合PID控制器:方位子系統控制器參數KP=90 000,KI=300,KD=0;俯仰子系統控制器參數KP=60 000,KI=100,KD=0。
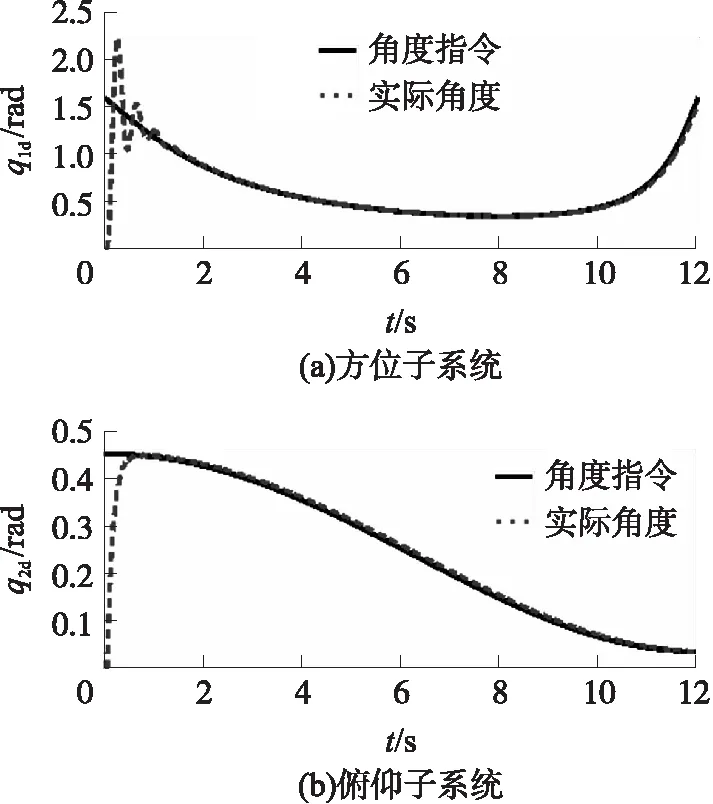
圖10 工況1實際角度對角度指令的跟蹤過程
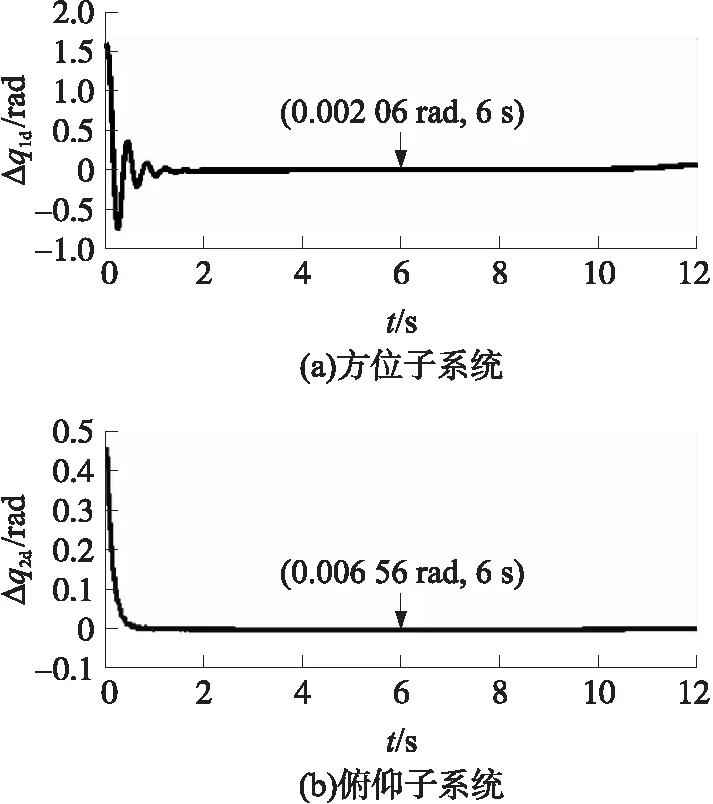
圖11 工況1跟蹤誤差
分析圖10、圖11可知,PID控制器作用下系統的跟蹤精度較高。方位子系統在1.2 s內可以實現穩定跟蹤,6 s時方位子系統跟蹤誤差約為2.06×10-3rad;俯仰子系統在0.8 s內可以實現穩定跟蹤,6 s時俯仰子系統跟蹤誤差約為6.56×10-3rad。
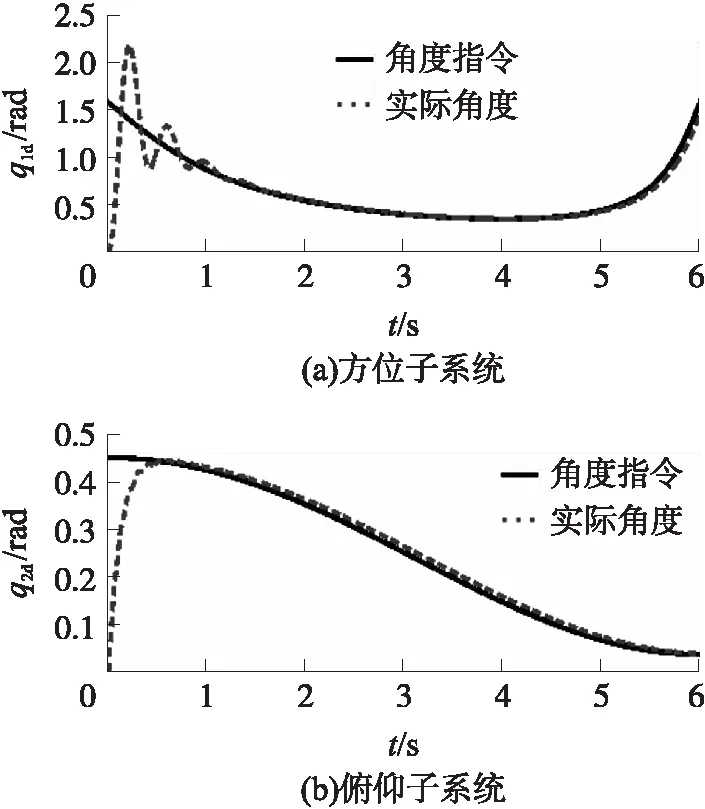
圖12 工況2實際角度對角度指令的跟蹤過程
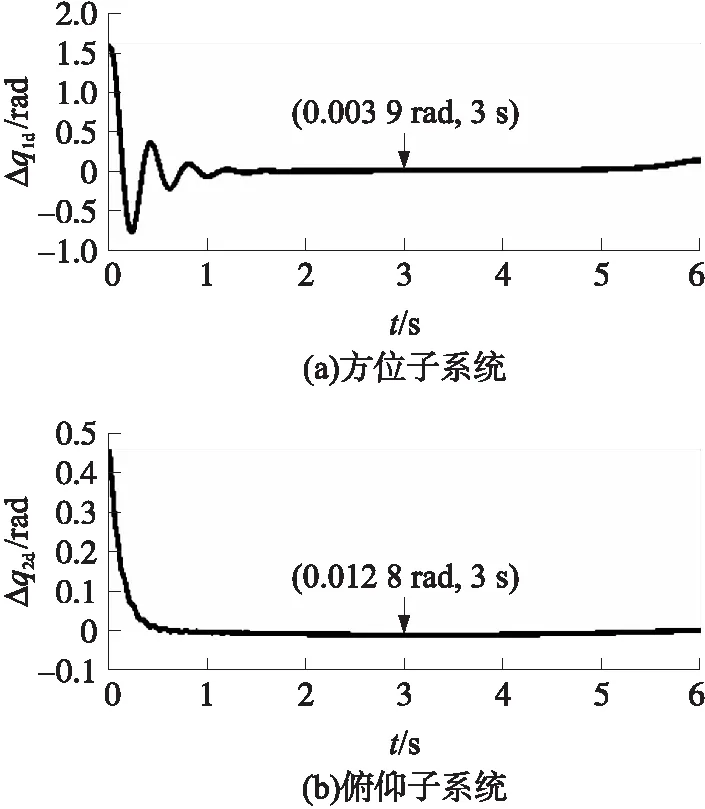
圖13 工況2跟蹤誤差
不同工況下的仿真驗證結果表明,坦克隨動系統方位子系統和俯仰子系統的跟蹤誤差都保持在約束范圍內,都能在較快的時間內跟蹤給定的角度指令,驗證了基于仿真平臺MWorks建立的坦克隨動系統軸間耦合非線性模型的正確性和有效性。
4 結束語
本文基于Mworks軟件平臺,建立了包括坦克隨動系統的軸間耦合負載非線性動力學模型、方位子系統驅動端動力學模型、俯仰子系統驅動端動力學模型的坦克隨動系統綜合動力學模型。與傳統的建模方法相比,本文建模環節綜合考慮坦克隨動系統兩軸耦合間結構柔性非線性、執行機構摩擦非線性、機構連接間隙非線性等非線性因素的影響,準確反映了坦克隨動系統非線性模型的動態特性。
基于Mworks設計了坦克隨動系統軸間耦合PID控制器,保證了PID控制器作用下坦克隨動系統方位子系統和俯仰子系統動態性能的穩定性,驗證了坦克隨動系統綜合動力學模型建模的準確性和有效性。通過對不同工況下仿真結果的分析可知,高頻率運動狀態下,坦克隨動系統的穩定精度會有一定下降;方位子系統和俯仰子系統在控制器的作用下都能夠快速獲得穩態精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19