基于ANSYSWORKBENCH的帶電作業(yè)機(jī)械臂模態(tài)探究
2021-03-30 18:24:21陳柏希段紹全王斐宏蔡文輝
科技風(fēng) 2021年8期
陳柏希 段紹全 王斐宏 蔡文輝

摘 要:在帶電作業(yè)姿態(tài)下,機(jī)械臂是配電網(wǎng)作業(yè)機(jī)械的主要執(zhí)行者,機(jī)械臂的性能直接決定了機(jī)器人工作質(zhì)量與效率,開展工作的可靠性等。本文借助Pro軟件或Engineer軟件,建設(shè)了在兩種典型位姿下機(jī)械臂的實(shí)體模型,運(yùn)用ANSYSWORKBENCH軟件,設(shè)定為預(yù)荷載狀況,對不同位姿下結(jié)構(gòu)靜力學(xué)的特性,其模態(tài)特征等開展分析。在模態(tài)分析結(jié)果基礎(chǔ)上,實(shí)施動力學(xué)前饋補(bǔ)償,自主控制機(jī)械臂的振動,抑制其工作過程內(nèi)的振動現(xiàn)象,確保工作開展效率與質(zhì)量。
關(guān)鍵詞:ANSYSWORKBENCH;機(jī)械臂;振動抑制;模態(tài)分析
自經(jīng)濟(jì)全球化發(fā)展,人們對電力供應(yīng)提出了更高的要求。在電力系統(tǒng)研究中,帶電作業(yè)屬于重要領(lǐng)域,其作業(yè)標(biāo)準(zhǔn)與質(zhì)量直接關(guān)系著國家供電技術(shù)與供電實(shí)力。就實(shí)際情況而言,人工帶電作業(yè)本身困難較大,卻存在著較大的局限性。此方面機(jī)器人的開發(fā)與研究十分有必要[1]。自20世紀(jì)80年代中期開始,國外很多國家開始了帶電作業(yè)機(jī)器人的研究,走在前沿的當(dāng)屬日本、美國、西班牙與加拿大。我國是20世紀(jì)90年代才開始的相關(guān)研究,但經(jīng)過短短的幾年,已經(jīng)取得了較大的研究成果。
有限元分析法在近代工程內(nèi)得到了廣泛的應(yīng)用,主要集中進(jìn)行數(shù)值模擬,可靠性比較明顯。本文主要選擇的是有限元ANSYSWORKBENCH軟件開展分析,深入剖析機(jī)械臂整體結(jié)構(gòu)[2]。選擇最大水平伸展、最大垂直伸展位姿,開展ANSYSWORKBENCH分析。在分析試驗(yàn)過程中,綜合考慮機(jī)械臂的實(shí)際持重情況,并施加預(yù)荷載。通過分析機(jī)械臂模態(tài)仿真,獲得兩種典型位姿下,機(jī)械臂的6節(jié)模態(tài)振型。在仿真結(jié)果基礎(chǔ)上,探索抑制機(jī)械臂振動的有效措施——動力學(xué)前饋補(bǔ)償。
作為帶電作業(yè)下的主要執(zhí)行機(jī)構(gòu),機(jī)械臂本身的性能直接影響著作業(yè)安全與質(zhì)量。因此,對帶電作業(yè)機(jī)械臂機(jī)械性能的分析,具有十分重要的現(xiàn)實(shí)意義。本文主要探討的是ANSYSWORKBENCH軟件下,帶電作業(yè)機(jī)械臂模態(tài),詳細(xì)分析如下。
1 帶電作業(yè)機(jī)械臂模態(tài)分析
1.1 有限元模型的建立
帶電作業(yè)下的機(jī)械臂本身擁有6個自由度,其組成結(jié)構(gòu)比較復(fù)雜。在進(jìn)行模型建立過程中,需要結(jié)合等效剛度代換理論,處理具體的結(jié)構(gòu),并對其簡化。筆者結(jié)合實(shí)際與文獻(xiàn)資料,認(rèn)為帶電作業(yè)條件下的機(jī)械臂,其等效簡化主要包含以下三點(diǎn):
(1)可以將各種連接、各種配合簡化,比如,可將齒輪、嚙合簡化,分解為軸與孔,通過將螺栓與鍵之間的連接簡化,以此轉(zhuǎn)換為面接觸。
(2)可將螺紋與倒角的特征忽略掉,將電位器與相應(yīng)的固定構(gòu)件忽略掉,并將其構(gòu)件與線路忽略掉。不僅如此,還可以將空特征、臺特診忽略掉,以此開展質(zhì)量的等效分布。
(3)結(jié)合液壓系統(tǒng)的特點(diǎn),選擇等效配重原理,有效簡化馬達(dá)、液壓缸及管路。通過開展適當(dāng)?shù)暮喕山ㄔO(shè)最大水平伸展、最大垂直伸展典型姿態(tài)下的機(jī)械臂模型[3]。在最大水平伸展位姿下,大臂關(guān)節(jié)與肩部關(guān)節(jié)之間的角度可保持到60°,機(jī)械臂此刻的最大承重為45kg。在最大處置伸展位姿下,肩關(guān)節(jié)為俯仰姿態(tài),角度為120°,此階段機(jī)械臂最大的持重為82.0kg。
1.2 模態(tài)仿真
在開展機(jī)械臂仿真前,需要先定義材料屬性,分析連接關(guān)節(jié)的類型。就機(jī)械臂上的各個構(gòu)件,在對材料開展屬性加載時,應(yīng)當(dāng)綜合考慮建模過程中,結(jié)構(gòu)的簡化問題。就機(jī)械臂連軸部位、夾持手部位的材料,可選擇不銹鋼。關(guān)節(jié)通過面約束實(shí)現(xiàn),綜合考慮機(jī)械臂的結(jié)構(gòu)特點(diǎn)。
本文選擇的是Bonded、No Separation兩種面對機(jī)械臂各個構(gòu)件進(jìn)行約束,接觸面進(jìn)行約束。選擇CFD模式,網(wǎng)格劃分機(jī)械臂,其粗細(xì)均選擇-50,劃分連接軸部分。
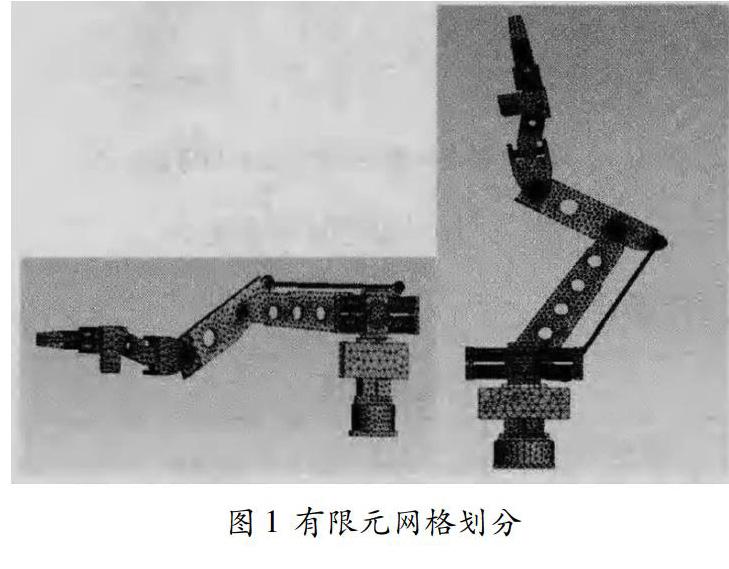
本文就機(jī)械臂連軸部分與夾持手部分彈性模量選擇的是193GPa,泊松比設(shè)置的為0.31,密度設(shè)置為7750kg/m3;其他部分為71GPa,0.33,2770kg/m3。網(wǎng)格劃分節(jié)點(diǎn)數(shù)為62180,單元數(shù)為243508,其結(jié)構(gòu)如下圖1所示。
1.3 仿真結(jié)果的分析
(1)結(jié)構(gòu)靜力學(xué),通過分析機(jī)械臂結(jié)構(gòu)靜力學(xué)方針,可獲得機(jī)械臂最大水平伸展時的壓強(qiáng)(99.24MPa),強(qiáng)度集中在肩關(guān)節(jié)、大臂關(guān)節(jié)連接位置。機(jī)械臂最大垂直伸展壓強(qiáng)(4381MPa),強(qiáng)度集中在大臂關(guān)節(jié)與小臂關(guān)節(jié)連接位置。關(guān)節(jié)連接部位是不銹鋼材料,最大壓強(qiáng)極限為200MPa,比機(jī)械臂實(shí)際工況承受壓強(qiáng)大很多,整體結(jié)構(gòu)可滿足工作要求[4]。手抓關(guān)節(jié)位置出現(xiàn)了最大位移,展現(xiàn)了關(guān)節(jié)變形情況與疊加情況。手抓關(guān)節(jié)最大位移為3.8874mm,規(guī)定最大伸展位移0.43246mm,已經(jīng)超出了規(guī)定值。機(jī)械臂在開展基線工況時,要朝著水平方向伸展。
(2)模態(tài)仿真,通過分析下表,下表模態(tài)振型數(shù)據(jù)可得知。①在同一位置與姿勢下,若在規(guī)定的承重范圍內(nèi),是否需要增加機(jī)械臂的荷載,是否會對固有頻率產(chǎn)生影響等問題,完全可以忽略,主要是因?yàn)橥饧雍奢d對機(jī)械臂自身的固有頻率影響微乎其微。②不同位置與姿勢下,在其持重范圍內(nèi),機(jī)械臂自身固有頻率變化,振型變化不大,隨著階數(shù)的增加,使得其變化也愈發(fā)明顯。可得知機(jī)械臂屬于裝配體,其位置與姿勢對固有頻率、振型會產(chǎn)生相應(yīng)的影響,但是若階數(shù)處于較低標(biāo)準(zhǔn)時,其影響不大。
2 振動控制手段
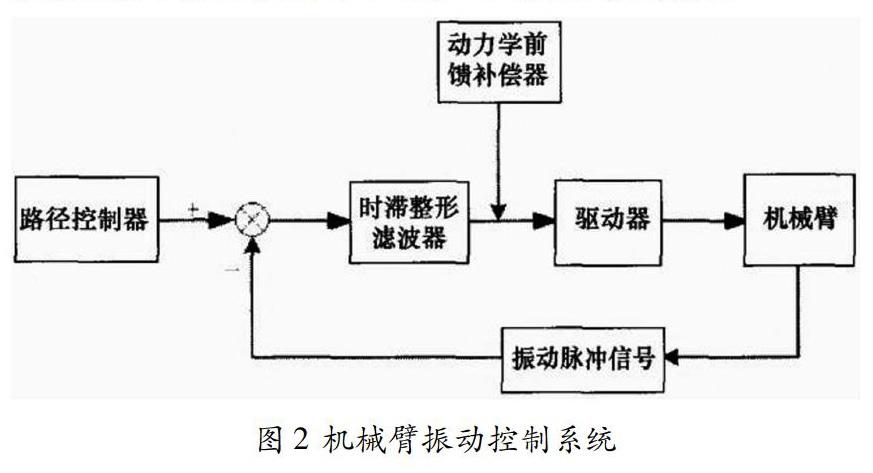
機(jī)械臂本身的1階、2階固有頻率較低,自主控制實(shí)現(xiàn)所帶來的影響更加明顯。為有效抑制機(jī)械臂的振動,可選擇動力學(xué)前饋的補(bǔ)償控制方案。借助滯整形過濾器模塊,動力學(xué)前饋的補(bǔ)償器模塊共同組成的振動控制系統(tǒng)。本身結(jié)構(gòu)比較簡單,可更好的實(shí)現(xiàn)。如下圖2所示,整形器接收到的路徑控制器信號,機(jī)械臂傳導(dǎo)的振動脈沖信號,驅(qū)動器輸出整形后的信號,能夠同時為驅(qū)動系統(tǒng)提供動力學(xué)補(bǔ)償。
3 結(jié)語
綜上所述,本文是在等效剛度基礎(chǔ)上,虛擬建模機(jī)械臂結(jié)構(gòu),可確保模態(tài)仿真的真實(shí)性與可靠性。使得連接與傳統(tǒng)也實(shí)現(xiàn)了等效,但只能獲得某一部分的整體情況。
通過建設(shè)機(jī)械臂的預(yù)荷載模態(tài),可實(shí)現(xiàn)工作情況的真實(shí)模擬與仿真,確保數(shù)據(jù)的可靠性,結(jié)構(gòu)的最優(yōu)化,驗(yàn)證了該機(jī)械臂結(jié)構(gòu)的合理性。
就機(jī)械臂的固有頻率,對主動控制有顯著的影響,可有效抑制振動,促使其高效工作。
可見,在ANSYSWORKBENCH軟件基礎(chǔ)上,開展帶電作業(yè)機(jī)器人相關(guān)探究,切實(shí)可行。
參考文獻(xiàn):
[1]趙生傳,趙玉良,李明,許崇新,趙閱群.帶電作業(yè)機(jī)器人遙操作主從冗余機(jī)械臂研究[J].電工技術(shù),2019(11):58-60.
[2]馬孝林.高壓帶電作業(yè)機(jī)器人作業(yè)機(jī)械臂的ANSYSWORKBENCH設(shè)計(jì)及優(yōu)化[D].山東建筑大學(xué),2018,28(06):22-25+34.
[3]姜振廷,鄭忠才,董旭.基于ANSYS WORKBENCH的六自由度機(jī)械臂有限元分析及結(jié)構(gòu)優(yōu)化[J].制造業(yè)自動化,2018,36(01):109-110+123.
[4]李健,姜振廷,董旭.基于ANSYS WORKBENCH的帶電作業(yè)機(jī)械臂模態(tài)分析及振動控制[J].制造業(yè)自動化,2018,36(01):48-51+65.
項(xiàng)目名稱:配網(wǎng)帶電作業(yè)智能機(jī)械臂關(guān)鍵技術(shù)及應(yīng)用研究(項(xiàng)目編號:050100KK52170012)
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44