科學(xué)家發(fā)現(xiàn)地球上最古老物質(zhì)距今七十五億年來(lái)自隕石
2020-03-25 08:14:46
海外星云 2020年1期
關(guān)鍵詞:研究

該隕石1969年墜落在澳大利亞
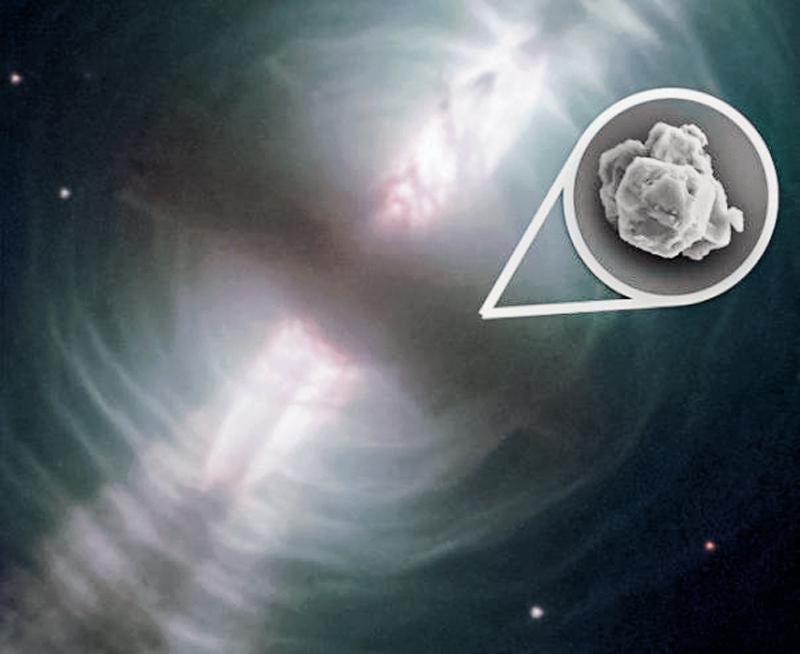
默奇森隕石中的某些太陽(yáng)前顆粒(右小圖)可能來(lái)自與卵狀星云類(lèi)似的演化恒星
科學(xué)家們?cè)谝粋€(gè)隕石中發(fā)現(xiàn)了地球上已知存在的最古老物質(zhì)。他們?cè)谝粋€(gè)20世紀(jì)60年代墜入地球的隕石中,發(fā)現(xiàn)了長(zhǎng)達(dá)75億年前的塵粒。這種古老的顆粒形成于太陽(yáng)系誕生之前的恒星之中。研究人員在《美國(guó)國(guó)家科學(xué)院院刊》《美國(guó)國(guó)家科學(xué)院院刊》上發(fā)表了這一研究結(jié)果。
當(dāng)恒星死亡時(shí),恒星上的粒子飄入太空,之后并入新的恒星、行星、衛(wèi)星或隕石中———它們被稱為“太陽(yáng)前顆粒”。芝加哥菲爾德博物館館長(zhǎng)、芝加哥大學(xué)副教授赫克說(shuō):“這是真正的恒星樣本,這是恒星塵粒。”
來(lái)自美國(guó)和瑞士的研究團(tuán)隊(duì)分析了這顆1969年墜落于澳大利亞的默奇森隕石,并對(duì)隕石中獲取的40顆太陽(yáng)前塵粒進(jìn)行分析。菲爾德博物館的格里爾說(shuō),這項(xiàng)工作一開(kāi)始是將隕石的碎片磨成粉末。“碎片最后成為一種糊狀物質(zhì),發(fā)出刺鼻的氣味,聞起來(lái)像爛花生醬,”格里爾解釋。這種氣味難聞的糊狀物后來(lái)溶于酸中,只剩下星塵。赫克說(shuō):“尋找這些星塵就如大海撈針。”
為了弄清楚太陽(yáng)前顆粒存在的年份,研究人員測(cè)量了它們?cè)谔罩斜┞队谟钪嫔渚€中的時(shí)間;這些宇宙射線是高能粒子,它們能穿過(guò)我們的銀河系亦能穿透固體。其中一些宇宙射線會(huì)與它們遇到的物質(zhì)相互作用,并形成新元素;它們暴露的時(shí)間越長(zhǎng),形成的這些元素就越多。
研究人員使用一種特殊的(同位素)氖21,來(lái)測(cè)量這些顆粒的年份。赫克稱:“這就好比在暴雨中置放的一個(gè)水桶。假設(shè)降雨是恒定的,水桶中積聚的水量會(huì)告訴你它在雨中暴露的時(shí)間。”測(cè)量存在多少新元素可告訴科學(xué)家谷物暴露在宇宙射線中的時(shí)間,這也反過(guò)來(lái)告訴我們這些顆粒的年紀(jì)。因此,研究團(tuán)隊(duì)發(fā)現(xiàn)有一些太陽(yáng)前顆粒竟然是有史以來(lái)發(fā)現(xiàn)的最古老的顆粒。
基于宇宙射線與這些顆粒相互作用了多少次,這些顆粒大多有46億年~49億年的歷史。太陽(yáng)的“年紀(jì)”是46億年,地球是45億年。這些顆粒中最老的已有75億年的歷史。
更多發(fā)現(xiàn)
赫克表示,目前為止“只有10%的顆粒年齡超過(guò)55 億年,60%的顆粒是‘年輕的(年齡介于46億年~49億年),其余的介于兩者之間。”“我相信默奇森和其他隕石中尚存更老的太陽(yáng)前顆粒,只是還沒(méi)被發(fā)現(xiàn)。”赫克說(shuō)。以前,用同位素測(cè)出的最古老太陽(yáng)前顆粒大約來(lái)自55 億年前。
關(guān)于新恒星是否以穩(wěn)定的速度形成,以及新恒星在不同時(shí)間段形成數(shù)量是否有高有低,科學(xué)家稱這次發(fā)現(xiàn)為相關(guān)討論提供了線索。赫克說(shuō):“由于這些顆粒,我們現(xiàn)在有了直接的證據(jù)證明,70億年前我們的銀河系中有一段恒星形成期。這是我們的主要發(fā)現(xiàn)之一。”
研究人員還了解到,太陽(yáng)前顆粒經(jīng)常組成“格蘭諾拉麥片”形狀的星團(tuán)穿越太空。赫克解釋?zhuān)骸斑^(guò)去沒(méi)人認(rèn)為如此大規(guī)模的團(tuán)簇現(xiàn)象是可能的。”
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
天津外國(guó)語(yǔ)大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車(chē)工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
國(guó)際商務(wù)財(cái)會(huì)(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19