典型輪式小麥機糧食產量監測系統技術與測試
2021-04-02 06:25:16梅國濤
農業工程 2021年1期
梅國濤,馮 潔
(1.濰柴雷沃重工股份有限公司,山東 濰坊 260000; 2.山東科技職業學院,山東 濰坊 261053)
0 引言
農業智能革命的核心要素是信息、裝備和智能,其表現形態就是智慧農業[1]。產量監測是智慧農業研究和應用的基礎功能,基于產量監測,推進精量播種、變量施肥和變量施藥等技術發展,從而實現節本增效,對于可持續農業發展具有重要意義[2-3]。國外谷物收獲機械產量監測系統已經比較成熟并大范圍應用。國內劉成良等[4]介紹了基于計算機視覺的谷物測產系統。劉仁杰等[5]介紹了基于光電傳感器的測產系統。國內團隊在產量圖方面有一些研究,但現有測產系統技術水平與國外相比仍有巨大差距,精度、可靠性和算法模型等與實現大規模應用還有一定的距離[4,6]。
1 基本原理
通過在籽粒升運器上安裝光電傳感器,記錄每個籽粒升運器刮板遮擋激光的時間,從而計算每塊刮板的谷粒流體積。根據容重和谷物體積模型計算出谷物質量,并進行累計,再與作業時GNSS位置數據結合,形成田塊中每個位置的產量數據(濕產量),可實現最小以3 m×3 m為單元方格的產量地圖,從而直觀發現低產、高產區域,并形成基于GIS的數據記錄和在線產量監測,為下一年播種、施肥等農業決策提供指導和數據支持[7-10]。糧食的濕產量和干產量計算如式(1)~(2)所示。
YW=v×wv
(1)
(2)
式中YW——濕產量
v——體積
wv——容重
YD——干產量
ma——實際測得水分
ms——糧食儲存所要求的水分
2 標定與調試
2.1 基本組成
系統基本組成包括激光傳感器、濕度傳感器、割臺高度傳感器、控制盒、顯示器、GNSS接收機和線束。
2.2 標定
2.2.1啟動作業狀態判斷
通過GNSS接收機計算車速、割臺高度傳感器判斷割臺狀態、激光傳感器判斷升運器狀態,從而綜合判斷輪式小麥機是否處于作業狀態。如果車速>0 km/h、割臺處在收割狀態且升運器運轉,則確定小麥機處于作業狀態,啟動產量記錄,記錄作業面積和糧食產量;如果判斷并未作業,則不啟動產量記錄。
2.2.2確定體積與產量對應關系
通過在實驗室開展標定工作,完成校準點(PC點)標定。共有6個PC點,PC點的準確性將影響測產的準確性。PC點是指在提升機中從谷物的零吞吐量(PC Tare)到最大吞吐量(PC 5)的測量體積數據與實際產量的對應關系。校準點標定如圖1所示。
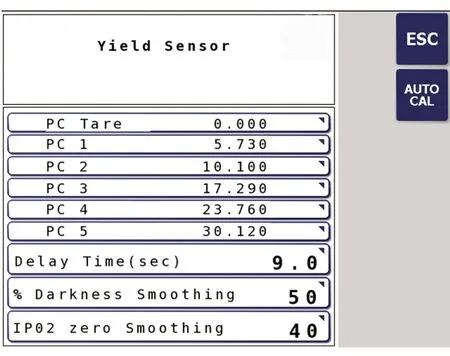
圖1 校準點標定Fig.1 Calibration point
2.3 確定作物容重,標定水分
通過在試驗田開展實地標定工作,完成容重測量和水分標定。經測定,試驗田小麥容重720 kg/m3,含水率12.9%。
2.4 綜合標定產量、水分和容重
標定試驗數據及誤差調整處理如表1所示。其中田塊3和4基本滿足精度97%以上要求,不做誤差修正調整。
3 測試結果
正式測試時調整小麥容重720 kg/m3(根據現場容重量杯測得)。測試地塊面積5.16 hm2,監測系統測得產量20 852 kg,平均產量4 041 kg/hm2。實際稱得糧食21 568 kg,平均產量4 180 kg/hm2,測量誤差為-3.3%。由監測系統測得的小麥濕產量最小值0,最大值6 993 kg/hm2,平均值4 041 kg/hm2;干產量最小值0,最大值7 279 kg/hm2,平均值4 068 kg/hm2。地圖原點坐標為36°33′51.09″N、119°9′20.29″E。
濕產量地圖與干產量地圖如圖2~3所示。

圖2 濕產量地圖Fig.2 Wet yield map

圖3 干產量地圖Fig.3 Dry yield map
糧食濕度最小值10%,最大值21%,平均值13%。糧食濕度地圖如圖4所示。
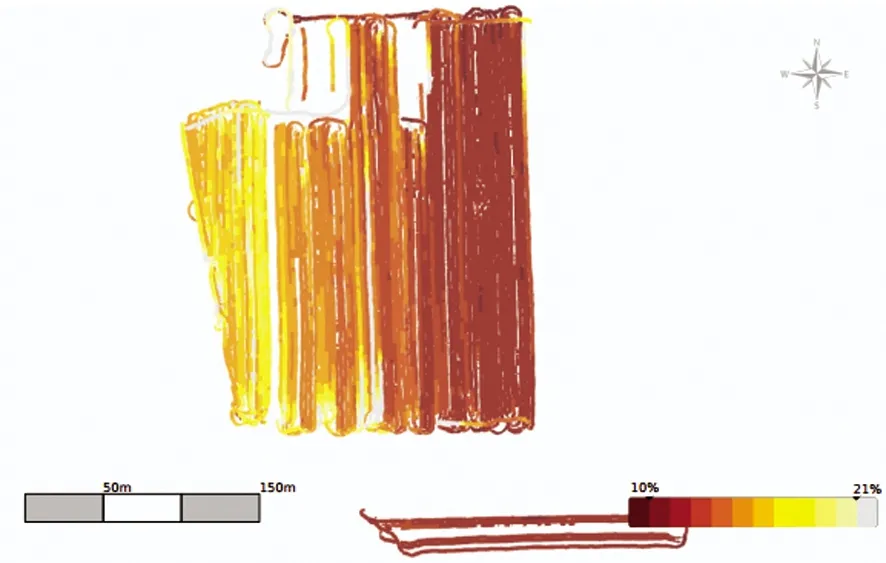
圖4 糧食濕度地圖Fig.4 Grain moisture map
4 應用前景
4.1 產量記錄
通過產量監測系統能夠精準掌握糧食產量和水分數據,實現對農場的精細化管理。
4.2 變量作業數據支持
通過基于位置數據的網格化產量數據,可以實現產量圖繪制,并結合其他數據生成處方圖,從而實現精準變量作業,對我國精準農業甚至智慧農業的實施及農業“一控兩減”具有重要價值,同時對糧食產量提升特別是糧食品質提升也有重要意義[11]。
5 結束語
隨著國家政策調整,未來可能將帶有產量監測的智能化輪式小麥收獲機械列入農業機械補貼政策支持范圍,這將大大促進產量監測及智能農機的推廣應用,對我國精準農業及智慧農業的發展具有重要意義。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
礦山安全信息(2022年40期)2022-04-07 02:16:52
當代水產(2021年10期)2021-12-05 16:31:48
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2020年20期)2020-11-26 06:09:10
聚氯乙烯(2018年9期)2018-02-18 01:11:34