4-SPRR-SPR 并聯機構運動性能評價與尺寸優化
2021-04-02 07:01:48郭強崔國華魚海東程禛溢
農業裝備與車輛工程 2021年3期
關鍵詞:優化
郭強,崔國華,魚海東,程禛溢
(201620 上海市 上海工程技術大學 機械與汽車工程學院)
0 引言
并聯機構的構型確定后,性能評價和尺度綜合是必須要解決的問題[1]。并聯機構的性能分析方法有很多,如靈巧度分析、剛度分析、運動/力傳遞性能分析等[2]。通過文獻[3]可知,當并聯機構既具有轉動又具有移動等4 個及以上自由度時,并聯機構的靈巧度性能指標將因為量綱不統一而失效。由于并聯機構在工作時需要提供比較大的推力,因此要求該機構具有較高的剛度和優秀的力傳遞性能。
本文擬采用運動/力傳遞性能指標[4]作為并聯機構的性能評價指標,對并聯機構進行尺度綜合。運動/力傳遞性能指標是計算機構的瞬時功率,這種概念最早由Ball[5]首次提出,但未對結果進行單位化,在此基礎上后經Liu 和Wang[4]的發展,建立了并聯機構分支的局部傳遞指標(Local transmission index,LTI)。該指標是無量綱指標,且與坐標系的建立沒有影響,是首個通過力傳遞性能對并聯機構進行評價的指標。
4-SPRR-SPR 并聯機構的構型最早由德國Metrom 公司提出,并研發了Pentapod PG 2000 切削機床[6]。Pentapod PG 2000 自設計出以來,取得了奪目的成就,但因其結構復雜,構型困難,國內外少有人對其進行研究。Pentapod PG 2000是一款適用于切削的機床,靈活度較大,但是存在剛度以及力傳遞性能不足的問題,不能應用于攪拌摩擦焊工況,所以需要對其進行尺寸優化。G.F.B?r[6]等介紹了該機床的構型基礎,推導了該機構運動學逆解和動平臺的速度,但是未考慮機構的伴隨運動;謝福貴[7]等以該機構為參考原型,衍生為2(UPRPU)S-UCR 構型,并命名為啄木鳥機構,并且對該衍生機構進行了運動學逆解推導,根據運動/力性能指標進行了機構尺寸優化。
本文以5 自由度4-SPRR-SPR 并聯機構為研究對象,將其用于汽車零部件攪拌摩擦焊接機器人的主進給機構,運用螺旋理論和運動/力性能評價指標對其進行性能評價和尺寸優化,優化后的機構不僅其優質工作空間GTW 明顯增大,出現0.9 的區域,而且全域傳遞指標GTI 也得到相應的提高。
1 并聯機構描述及坐標系建立
4-SPRR-SPR 并聯機構三維簡圖如圖1 所示,樣機如圖2 所示。該并聯機構由定平臺、動平臺、驅動桿和各種運動副構成,定平臺和動平臺通過第1 支鏈-SPR 支鏈和第2,3,4,5 支鏈-SPRR支鏈構成。第1 支鏈自上而下通過球副(S)、移動副(P)、轉動副(R)連接,第2—5 支鏈自上而下通過球副(S)、移動副(P)、2 個轉動副(R)連接。
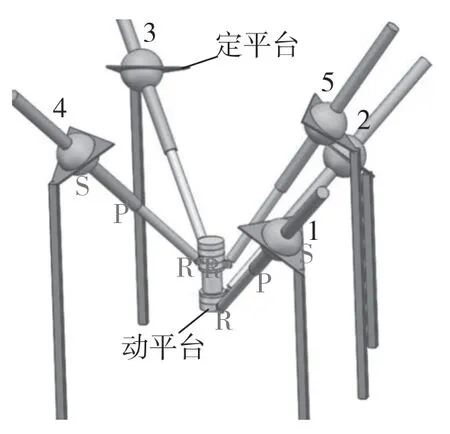
圖1 4-SPRR-SPR 三維模型圖Fig.1 4-SPRR-SPR 3D model
如圖3 所示,建立的定坐標系O-XYZ 和動坐標系o'-x'y'z'。Ai為機架上第i 支鏈球副S 的圓心,以A1,A3連線的中點為原點,建立絕對坐標O-XYZ,OY 軸與水平面平行且指向A1,OZ 軸豎直向上。
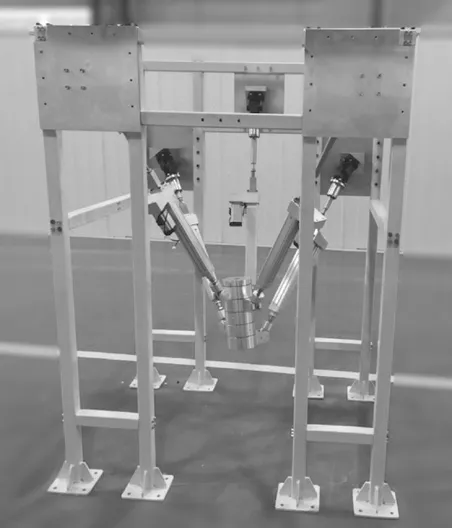
圖2 4-SPRR-SPR 樣機Fig.2 4-SPRR-SPR prototype
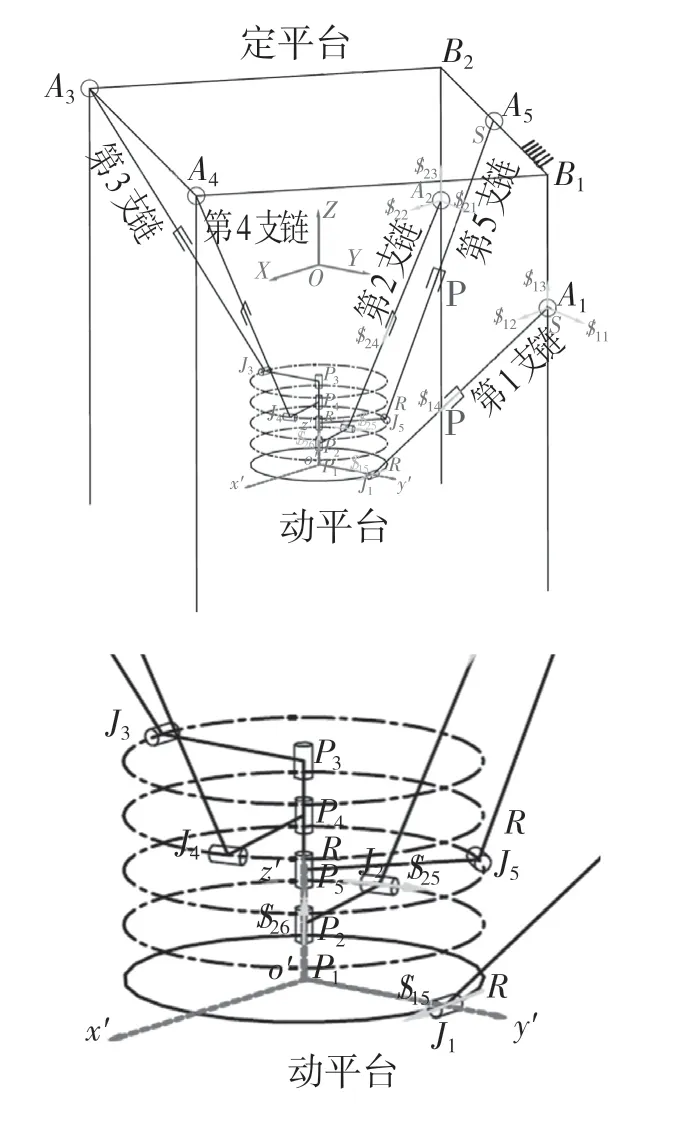
圖3 4-SPRR-SPR 機構簡圖Fig.3 4-SPRR-SPR mechanism sketch
建立運動平臺坐標o'-x'y'z'。oy'軸與P1J1重合,o'z'與動平臺軸線重合。Ji為第i 支鏈上轉動副R1軸線中心點。P1與o'點重合,P2-P5為第2~5 支鏈轉動副R2軸線中心點,與P1距離分別為c2-c5。因此J1點相對動平臺固定,而J2-J5點可以繞o'z'軸以動平臺半徑r 轉動。
2 并聯機構的運動性能評價
2.1 運動/力傳遞性能介紹
并聯機構的運動/力傳指標包括輸入傳遞性能指標和輸出傳遞指標兩部分[8]。根據文獻[9]可知,非冗余并聯機構的LTI 計算公式為
式中:λi——第i 個支鏈的輸入傳遞性能指標;ηi——第i 個支鏈的輸出傳遞性能指標;$Ti——第i 個支鏈的傳遞力螺旋;$Ii——第i 個支鏈的輸入力螺旋;$Oi——第i 個支鏈的輸出力螺旋
從式(1)可得,機構輸入/輸出傳遞性能指標取值范圍為λi,ηi∈(0,1],兩種指標的值越大,表示機構的力傳遞性能越好,值越小表示機構力傳遞性能越差。當值接近于0 時,機構會發生輸入/輸出傳遞奇異。
機構的輸入、輸出傳遞性能指標能同時反應出機構瞬時的傳遞效率,任何一個性能指標的值過低,都會影響機構的傳遞性能。并且,每個分支中的輸入、輸出傳遞性能指標在不同位型下一般不同,因此,機構的最終傳遞效率由輸入、輸出傳遞性能指標值最低的分支決定,在文獻[10]中,定義了LTI 的計算公式:

式(2)中,γ的取值范圍為(0,1),且為一個無量綱常數,與坐標系無關,γ越大,表示該機構在該點的力傳遞性能越好,機構的傳遞效率越高。
文獻[11]中,通過傳遞角的概念,定義當γ≥0.7 時,表征該機構傳遞效率較高,這些位置點的合集定義為運動/力的優質工作點(GPW)。
2.2 運動/力傳遞性能分析
如圖3 所示,在文獻[12]中,作者已經分析得出該機構只存在一個約束力螺旋:
式(3)中,螺旋$c軸線過球副中心A1點且與支鏈1 中的轉動副R1軸線平行。
由于該并聯機構具有5 個主動的移動副,因此具有5 個輸入運動螺旋$I和5 個傳遞力螺旋$T,其中輸入運動螺旋為
接下來對4-SPRR-SPR 并聯機構的傳遞力螺旋$T進行求解。以第1 支鏈為例,當第1 支鏈的驅動副對應的螺旋$14被鎖定,可得此時第1 支鏈運動副旋系U1為
以第2 支鏈為例,當第2 支鏈的驅動副對應的螺旋$24被鎖定,可得此時第2 支鏈運動副旋系U2為
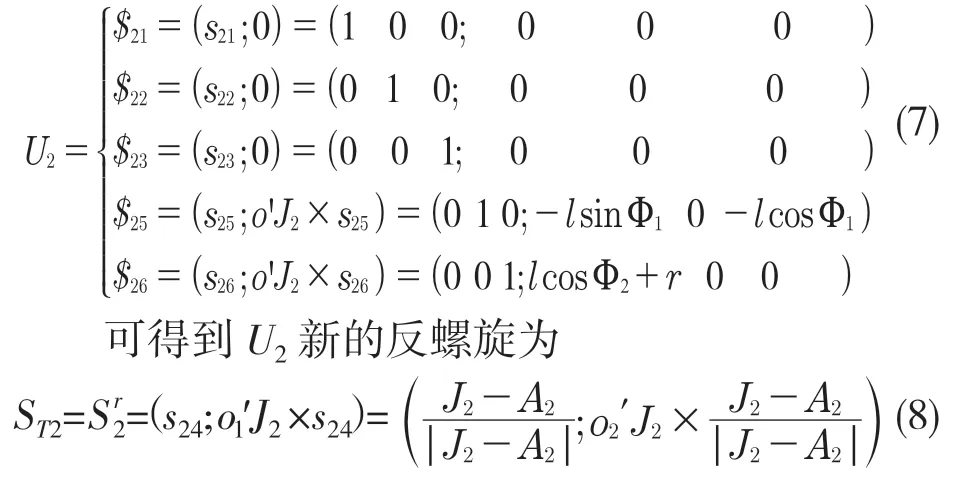
由于第3 支鏈、第4 支鏈、第5 支鏈構型與第2 支鏈構型相同,可得其余支鏈驅動副被鎖定后的新反螺旋為
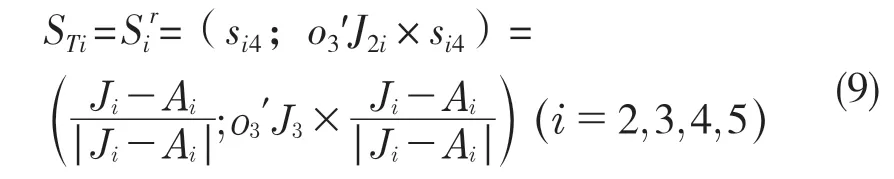
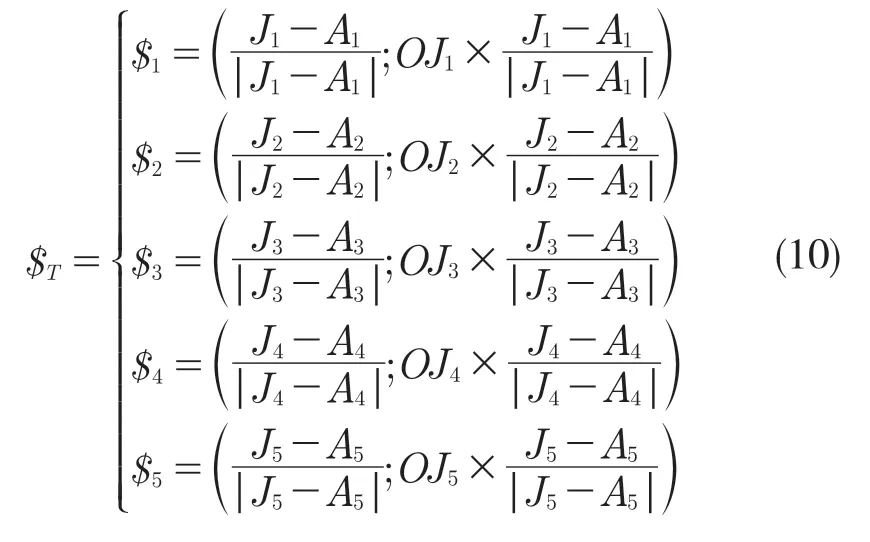
通過上述步驟,可求出每條支鏈在局部坐標系下的力傳遞螺旋$Ti。傳遞力螺旋的大小會受坐標系的影響,但不會影響其軸線方向。為了將力螺旋坐標統一,因此需要將其從局部坐標統一轉化到固定坐標系O-XYZ,可得
設并聯機構的單位輸出運動螺旋為$oj=(LojMojNoj;PojQojRoj)(j=1,2,3,4,5),通 過文獻[13]可知,單位輸出運動螺旋$oj與傳遞力螺旋$Ti和約束力螺旋$c存在以下關系:

可采用文獻[14]提出的利用增廣矩陣的方法求解單位輸出運動螺旋$Oj,本文不再詳細描述。
綜上所述,并聯機構的輸入傳遞指標ILI 為

從式(12)可得,機構在任何位置時,λi恒 為1。即該機構輸入傳遞效率為100%。
并聯機構的的輸出傳遞指標OLI 為

綜上所述,并聯機構局部傳遞指標(LTI)為

3 并聯機構的尺寸優化與結果分析
3.1 并聯機構的尺寸優化
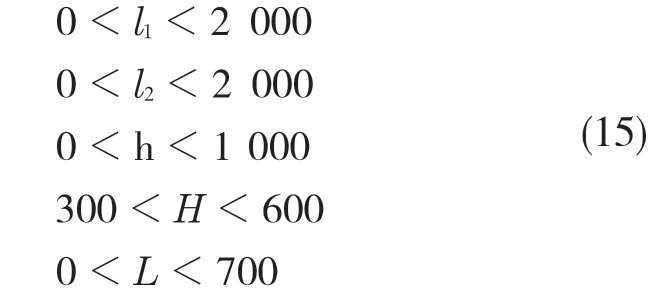
并聯機構的尺寸優化過程的第1 步是要確定該機構的主要參數。如圖1 所示機構的主要參數有:l1——機構的定平臺的長;l2——機構的定平臺的寬;r ——動平臺的半徑;h1——動平臺的高度;h2——支鏈3,4,5 與支鏈1,2 的高度;L——支鏈驅動桿長度。
在實際中,機構體積、奇異位置、加工成本等,機構桿件參數不可能為無限長度,因此需要根據實際條件對桿長參數進行約束,如式(15)所示:
根據已有的運動/力傳遞性能及文獻[15],GTW 表示的是機構優質工作空間大小,機構的全域傳遞指標(GTI)如式(16)所示,描述的是機構在整體優質工作空間。
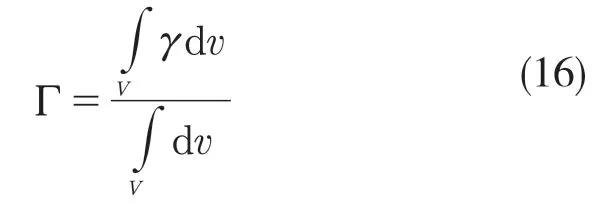
式中:V——機構的GTW 區域;Γ——無量綱常數,Γ∈(0.7,1.0)。Γ越大,表明機構在GTW范圍內運動/力傳遞性能越好。
因此,本文選定GTW 以及GTI 作為機構尺度的優化目標函數。
3.2 并聯機構的尺寸優化的結果分析
3.1 節已經定義了優化目標函數、約束條件以及優化算法。因為該并聯機構具有5 個自由度,因此,動平臺末端即使在相同位置,不同姿態下的機構GTW 以及GTI 也會不同,所以,優化目標函數通過搜尋可達空間下的GTW 以及GTI 的極值并不會找到不同工況下的尺寸最優值。因此,運用運動/力傳遞性能指標對于4,5,6 自由度的并聯機構進行尺度優化,需要以并聯機構的實際工況為基礎,具體工作方式具體分析。如圖4所示,本文以并聯機構焊接汽車輪轂鋁合金輪轂為例(β=70°,D=38 cm),進行尺度優化。設優化目標GTW ≥4 000(由加工工作空間決定)、GTI ≥0.78,進行多次遺傳算法求解最優尺寸,其12 組數據如表1 所示。
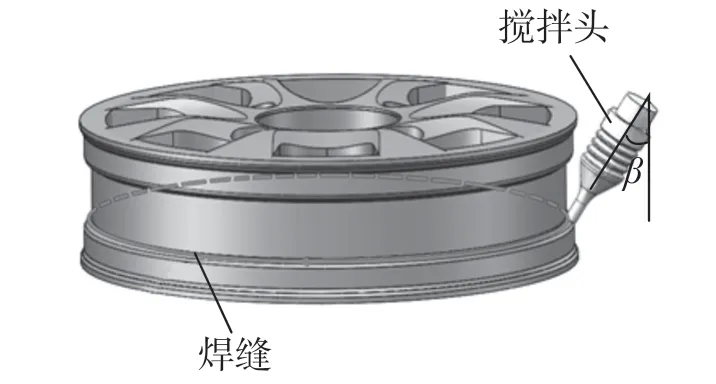
圖4 輪轂FSW 焊縫Fig.4 FSW weld of hub
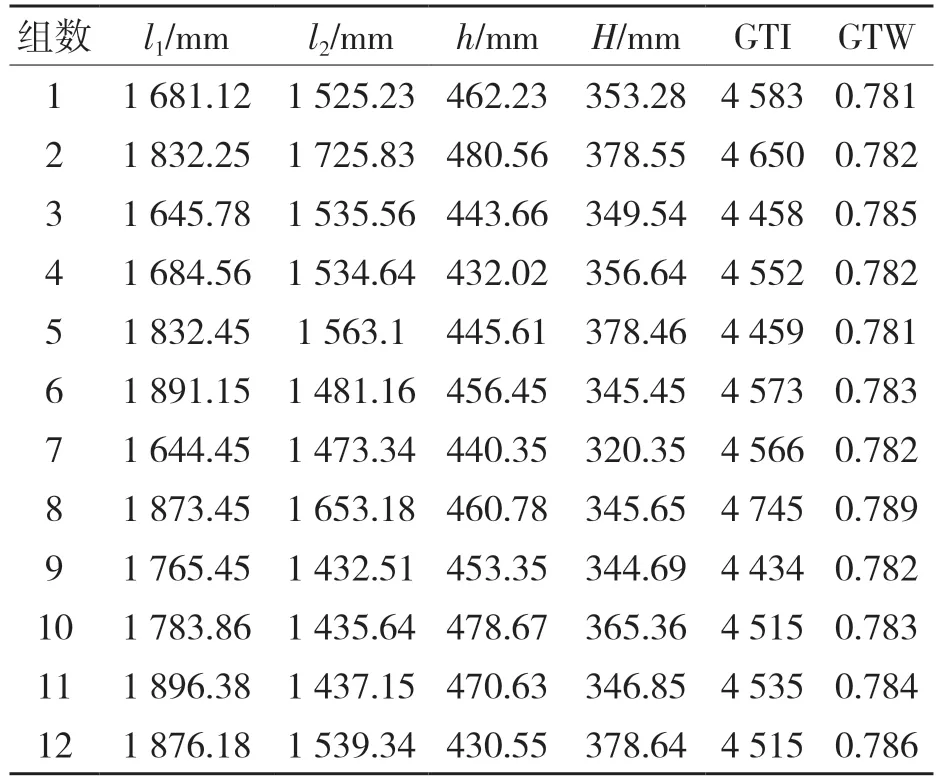
表1 優化后機構參數Tab.1 Optimized mechanism parameters
由表1 可知,第8 組的并聯機構尺寸擁有較大工作空間以及較高的性能,因此,選定第8 組數據為樣機的最終尺寸。如圖5 所示,并將機構初始參數與優化后尺寸進行LTI 指標對比發現,不僅機構的優質工作空間GTW 明顯增大出現0.9 的區域,而且GTI 也得到相應的提高。
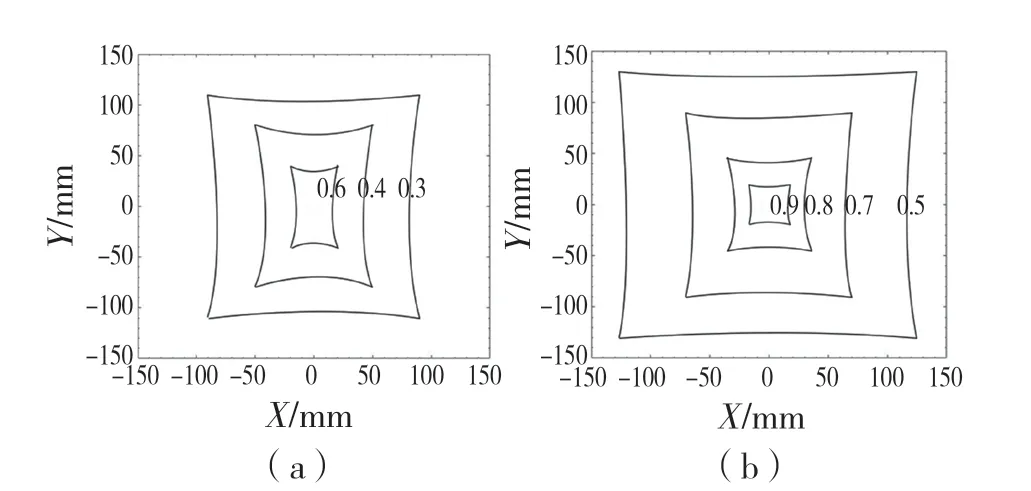
圖5 運動/力傳遞性能圖譜Fig.5 LTI map
4 結束語
對攪拌摩擦焊機器人主進給機構——4-SPRR-SPR 并聯機構進行運動性能評價與尺寸優化,得到如下結論:
(1)根據攪拌摩擦焊實際工況,確定4-SPRR-SPR 并聯機構的運動評價指標。
(2)得到了機構的輸入螺旋、輸出螺旋和傳遞力螺旋,然后將其從局部坐標系進行坐標統一,通過增廣矩陣法,得到機構的單位輸出運動螺旋。
(3)以焊接汽車鋁合金輪轂為實例,設定優化目標,并通過遺傳算法得到并聯機構的尺寸最優值,繪制LTI 性能圖譜,優化后的機構運動/力傳遞性能得到明顯提升。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45