混合動力汽車制動控制策略的研究
2021-04-02 07:02:00紀佳圳熊銳吳堅張中威張盼望李沛煥
農業裝備與車輛工程 2021年3期
紀佳圳,熊銳,吳堅,2,張中威,張盼望,李沛煥
(1.510006 廣東省 廣州市 廣東工業大學機電工程學院;2.510640 廣東省 廣州市 廣汽集團汽車工程研究院)
0 引言
環境污染日益嚴重,能源短缺問題日益突出,各國紛紛出臺法規限制汽車排放,混合動力必然成為一定時期內車輛領域主要發展的技術[1]。相對于傳統車輛,制動能量回收是混合動力汽車的一大優點。制動力分配控制策略是影響制動能量回收的一個重要因素。目前針對制動能量回收的控制策略主要有:定比例制動力分配控制策略、理想制動力分配控制策略以及最大化能量回收制動力分配控制策略。杜榮華[2]等針對分布式驅動電動汽車的控制,提出一種分層制動轉矩分配策略;張振[3]設計了一種滿足聯合國歐洲經濟委員會(ECE)汽車法規的制動力分配控制策略,用以對純電動汽車進行制動控制;Bravo[4]等研究了重型混合動力汽車的氣液聯動制動系統,提出將制動能量儲存在液壓蓄能器中能夠提高卡車和公交車的能源利用效率;Kumar[5]等考慮駕駛員感覺,提出“聯合制動”方案,使制動力分布更接近理想制動力分配曲線。Kalia[6]等設計了一種將制動時電機的制動轉矩限制在其最佳工作點附近的最優控制策略。
本文通過分析影響制動能量回收的重要因素,提出一種基于ECE 法規和理想制動力分配的前后輪制動力分配控制策略,通過模糊控制策略得到再生制動力分配系數,建立MATLAB/Simulink 模型,使用AVL Cruise 軟件進行聯合仿真。結果表明,該策略能有效提高混合動力汽車的制動能量回收效率。
1 影響再生制動效率的因素
混合動力汽車制動能量回收是指利用汽車在制動時的慣性動能帶動電機轉子旋轉,并將產生的電能儲存在電池組中。這一過程中,帶動電機轉子旋轉的再生制動轉矩越大,產生的電能就越多,再生制動效率越高。影響電機制動轉矩的因素包括電池SOC、電機制動外特性以及制動力分配控制策略等。
1.1 電池SOC
混合動力汽車制動時,動力電池充電電流與電機制動轉矩的關系如下:

式中:Ich——動力電池充電電流;Tm——電機提供的制動轉矩;ωm——電機轉速;η——綜合效率因子;UB——電池端電壓。
當電池SOC 值較大時,過大的充電電流容易導致電池過充,從而對其產生不可逆的損傷,因此,為保證電池組的使用壽命,必須對電機制動轉矩進行限制。
1.2 電機制動外特性
本文研究的混合動力汽車所用電機為永磁同步電機,其制動轉矩外特性曲線如圖1 所示,亦可通過公式表示如下:

圖1 電機制動外特性曲線Fig.1 Motor braking external characteristic curve
可以得到,當電機轉速ωm低于基速ωb時,電機能夠提供恒定的制動轉矩Tmax;當電機轉速高于基速ωb時,電機能提供的制動轉矩與轉速成負相關關系,轉速越高,制動轉矩越小。
1.3 制動強度
制動強度z 表征的是車輛制動時的減速度與重力加速度之比[7],即

由式(3)知,制動強度越大,前后輪制動力越大,此時可分配給電機的再生制動轉矩越大。
1.4 制動力分配控制策略
在等制動強度的條件下,制動力分配策略不同,電機所分配的再生制動轉矩不同,若要最大限度保證制動能量回收,則需要電機提供更多的再生制動轉矩,這樣做的后果是增加了車輛制動過程中的不穩定性;反之,若要保證車輛制動時的穩定性,那么制動能量回收效率必然會受到影響。如何平衡二者之間的關系,關鍵在于制定更加合理的制動力分配策略。
2 前后制動力分配控制策略
2.1 理想制動力分配
圖2 為車輛在水平路面制動過程受力狀態。

圖2 車輛制動受力圖Fig.2 Analysis of vehicle braking force
分析可得,車輪受到地面的法向作用力大小為

式中:FZ1——地面對前輪的法向作用力;FZ2——地面對后輪的法向作用力;L——車輛軸距;a——車輛質心到前軸中心線的距離;b——車輛質心到后軸中心線的距離;hg——質心高度。
若前后輪同時抱死,有

式中:Fμ1——車輛前輪制動力,為電機再生制動力和前輪制動器制動力之和;Fμ2——車輛后輪制動力,即后輪制動器制動力;φ——地面附著系數。
消去變量φ可得

式(6)表示的前、后輪制動力關系曲線即為理想制動力分配曲線,簡稱I 曲線。車輛制動時若按此曲線分配前、后輪制動力,車輛前、后輪總是同時抱死,因此能夠保證車輛制動時的穩定性及安全性。然而此種控制策略的再生制動效率并不理想。
2.2 基于ECE 法規制動力分配
ECE 法規是聯合國歐洲經濟委員會制定的為保證車輛制動穩定性的安全法規。法規規定對于φ=0.2~0.8 的路面狀況,制動強度需滿足以下條件:

根據ECE 法規,車輛制動時前、后輪制動力應滿足式(8)。
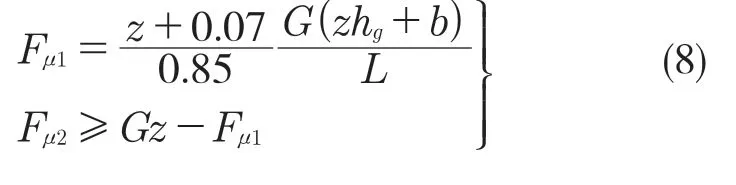
將根據式(8)前、后輪制動力關系畫出來的曲線稱為M 曲線。車輛制動時按此曲線分配前、后輪制動力,電機將提供更多的再生制動轉矩,能最大限度進行制動能量回收。此種控制策略的弊端是車輛制動過程中的穩定性較差。
2.3 本文制動力分配策略
本文結合理想制動力曲線和ECE 法規制動力分配曲線,根據制動強度的不同,提出一種多段前后輪制動力分配控制策略,如圖3 所示。
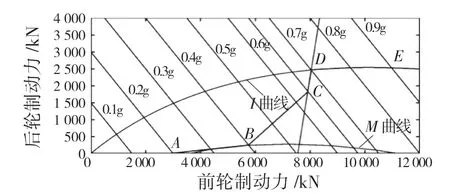
圖3 前后輪制動力分配控制策略Fig.3 Control strategy of front and rear wheel brake force distribution
具體控制策略為:
(1)當制動強度z ≤0.2 時,制動強度不高,因此該工況下由前輪提供車輛所需的全部制動力,即圖3 中OA 段;
(2)制動強度0.2<z ≤0.4 時,由于ECE法規限制,前后輪制動力分配需位于M 曲線上方,故該工況下,由前后輪同時提供制動力,即圖3中AB 段;
(3)制動強度0.2 <z ≤0.7 時,隨著制動強度增大,考慮車輛制動穩定性,適當增加后輪制動力比重,即圖3 中BC 段;
(4)制動強度z>0.7時為緊急制動。該工況下,前、后輪制動力按I 曲線分配,即圖3 中DE 段。
3 再生制動力模糊控制
3.1 再生制動力模糊控制分配策略
前輪電機制動力與制動器制動力分配策略具體如下:
(1)輕微制動工況下,僅由電機提供再生制動力;
(2)中度制動和重度制動工況下,由電機和制動器共同參與制動,電機再生制動力分配系數由模糊控制器求出;
(3)緊急制動工況下,關閉再生制動功能,由制動器提供全部制動力。
基于以上規則,本文提出的制動力分配控制策略流程圖如圖4 所示。
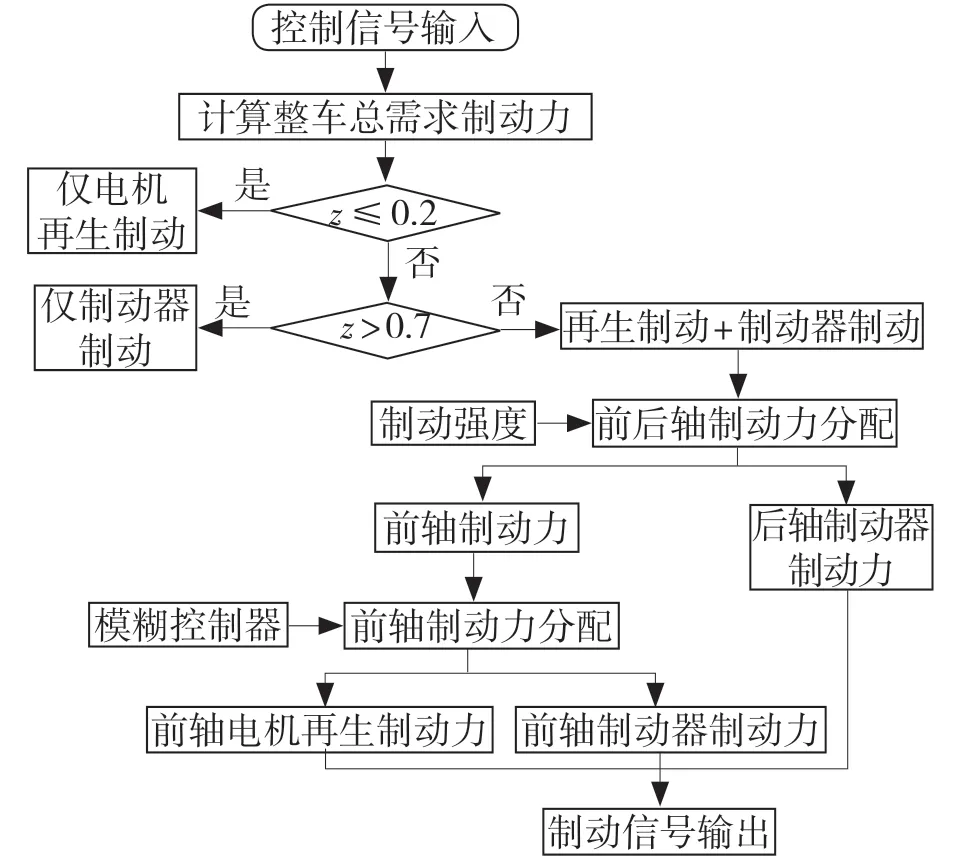
圖4 制動力分配控制策略流程圖Fig.4 Flow chart of braking force distribution strategies
4 建模與仿真分析
4.1 整車模型及控制策略模型
在AVL Cruise 中建立整車仿真模型[8],如圖5 所示。該模型主要由電池模塊、電機模塊、駕駛員模塊、輪胎模塊以及AVL Cruise Interface 控制策略模塊等組成。

圖5 AVL Cruise 整車仿真Fig.5 AVL Cruise vehicle simulation
本文在MATLAB/Simulink 中搭建基于制動強度的制動控制策略,如圖6 所示。
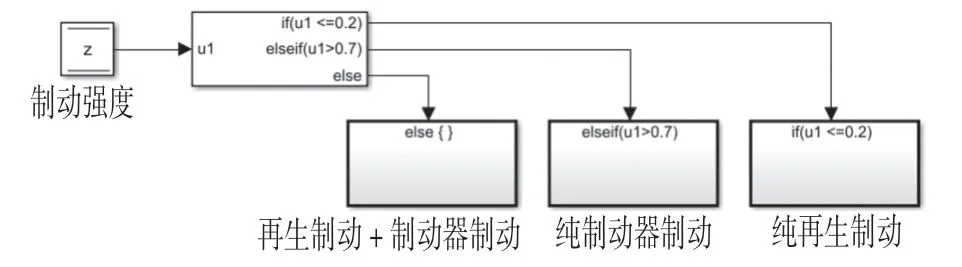
圖6 制動控制策略Fig.6 Braking force control strategy
圖7 為前后輪制動力分配控制策略模型。其中,再生制動力分配系數由模糊控制器求出,并與當前車速下電機所能提供的制動力比較,取兩者之間的較小值作為電機的再生制動力,不足的前輪制動力由制動器提供,后輪制動力由后輪制動器提供。

圖7 前后輪制動力分配Fig.7 Front and rear wheel braking force distribution
由前文可知,影響再生制動效率的因素有很多。本文選取其中影響較大的電池組SOC 及車速,設計對應模糊規則,求得電機再生制動分配系數k,如圖8 所示。模糊規則根據大量實驗數據得出。將電池組SOC 的模糊語言設置為{VL,ML,L,M,H,MH,VH},車速V 的模糊語言設置為{VS,MS,S,M,B,MB,VB},電機再生制動分配系數k 的模糊語言設置為{ VS,MS,S,M,B,MB,VB },各隸屬函數如圖9-圖11 所示。
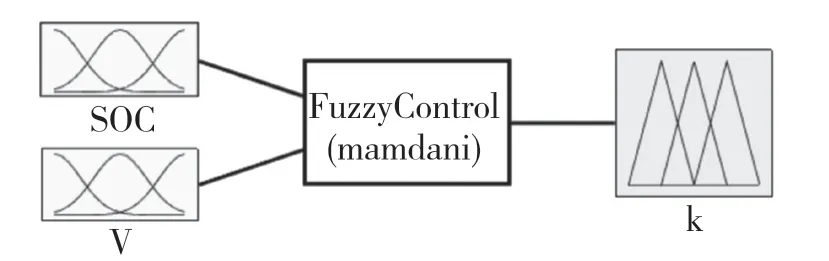
圖8 模糊控制策略Fig.8 Fuzzy control strategy

圖9 SOC 隸屬函數Fig.9 Membership function of SOC

圖10 車速隸屬函數Fig.10 Membership function of velocity

圖11 再生制動分配系數k 隸屬函數Fig.11 Membership function of distribution coefficient k of regenerative braking
模糊規則依據大量實驗數據得到,總共有49 條,如表1 所示。

表1 再生制動分配系數k 規則表Tab.1 Rules for distribution coefficient k of regenerative braking
4.2 仿真分析
在AVL Cruise 中搭建好整車模型后,將MATLAB/Simulink 中的制動力控制策略模型生成DLL 文件,并把它嵌入到整車模型中進行聯合仿真。車輛主要參數如表2 所示。

表2 仿真車輛主要參數Tab.2 Main parameters of simulation
本文選用NEDC 工況對所制定的控制策略進行仿真分析,具體工況如圖12 所示。
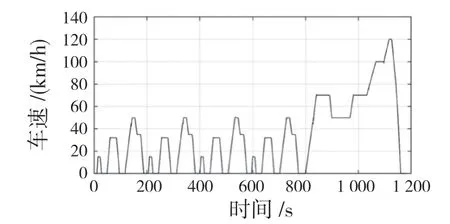
圖12 NEDC 工況曲線Fig.12 NEDC working condition
將以上車輛參數和工況輸入到模型中后進行仿真,結果如圖13-圖15 所示。

圖13 仿真SOC 變化曲線Fig.13 Simulation result of SOC

圖14 制動信號Fig.14 Brake signal

圖15 電機轉矩Fig.15 Motor torque
圖13 為NEDC 工況下車輛SOC 值的變化情況。縱觀整個工況區間,有再生制動控制的情況下的電池組SOC 值下降趨勢緩慢。在此期間,當車輛制動時,SOC 值會有一個短暫的升高過程,意味著制動能量得到有效回收;無再生制動控制的情況下,電池組SOC 值下降較為快速,車輛制動時,SOC 值沒有上升,制動能量沒有得到回收。循環工況開始時二者SOC 值皆為0.90。循環工況結束時,無再生制動控制的情況下SOC值為0.61,總共消耗了29%的電池電量;有再生制動控制的情況下SOC 值為0.69,總共消耗了21%的電池電量,相比前者提高了13.1%。
圖14 和圖15 分別為車輛制動信號及再生制動控制下的電機轉矩信號,轉矩正值是電機拖動或電機助力工況,負值是制動能量回收工況。結合兩圖可以看到,當有制動信號發出時,電機能夠快速響應,提供制動轉矩并進入能量回收工作狀態,保證了制動的安全性及能量回收的效率。
5 試驗驗證及分析
為驗證提出的控制策略的有效性,在底盤測功機上對本文仿真的原型混動車輛進行了實車測試,試驗工況為NEDC 循環工況。圖16 為實車車速與工況目標車速變化曲線,圖17 為實車電池SOC 變化曲線。

圖16 車速變化曲線Fig.16 Curve of velocity

圖17 實車SOC 變化曲線Fig.17 Curve of vehicle SOC
如圖16 所示,實車實驗中,實際車速與目標車速擬合情況良好,符合工況試驗要求。試驗過程中,車輛電池SOC 值從初始0.76 下降到0.53,總共消耗了23%的電池電量。由于試驗過程中,實驗人員對車速、加速踏板以及制動踏板等的控制與仿真之間存在區別,盡管實車試驗結果與仿真結果相比SOC 值略有下降,依然能夠證明本文提出的能量回收控制策略的有效性。
6 結束語
本文通過分析影響制動回收效率的因素,提出一種基于制動強度劃分的多比值前后輪制動力分配控制策略和模糊控制算法,建立整車模型并進行AVLCruise 和MATLAB/Simulink 的聯合仿真。結合仿真結果,該控制策略在NEDC 工況下,能夠降低13.1%的電池SOC 消耗,能有效提高車輛的續航。最后,通過實車試驗進一步驗證了基于制動強度的制動控制策略的有效性。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24