基于弓網接觸力優化的主動控制式受電弓研究及設計
2021-04-02 14:44:05孫云嵩郭瑾玉歷洋
機電信息 2021年9期
孫云嵩 郭瑾玉 歷洋


摘要:為改善高速動車組用受電弓弓網受流質量,提出并設計了一種基于弓網接觸力優化的主動控制式氣囊受電弓,該受電弓通過在線調節氣囊氣壓,提高了弓網受流穩定性。
關鍵詞:受電弓;氣囊;弓網接觸力;主動控制
0? ? 引言
受電弓-接觸網系統的受流性能是高速動車組的關鍵技術之一。隨著速度的提高,弓網接觸力波動加劇,僅從弓網系統參數的優化方面考慮提高受流質量效果不明顯,因此,高速受電弓的主動控制是解決和改善高速弓網受流問題的重要方法[1]。
1? ? 弓網接觸力的調整
1.1? ? 弓網接觸力
列車運行速度對弓網動態性能有直接作用,隨著速度的提高,弓網接觸力波動幅度明顯增加,接觸力的最小值降低,受電弓的離線率增大,火花率也隨之增加[2-3]。
接觸力的值隨受電弓和接觸網的系統組合變化而變化。當接觸力的值被用于定義受流時,平均接觸力、接觸力的標準偏差、最大接觸力、最小接觸力是受流質量的準則。具體如下[4]:
高速動車組的弓網接觸力主要包含三部分[5-9]:(1)受電弓靜態接觸力(與氣囊充氣后產生的升弓力矩有關);(2)空氣抬升力(與運行速度、受電弓開閉口等有關);(3)弓網動態力(與受電弓結構及弓網耦合有關)。
1.2? ? 氣囊式受電弓的弓網接觸力調整
由式(6)可知,在一定速度下,靜態接觸力Fj與空氣動力Fk不變,弓網接觸力的變化主要是由弓網動態力P引起的。當弓網動態力P引起弓網接觸力F為0或者負值時,受電弓極易離線并產生火花,降低受流質量,甚至造成受流質量不滿足標準要求。為了提高受流質量,保證弓網接觸力穩定,避免受電弓離線,需要對過低的弓網接觸力進行補償。而空氣動力Fk為不可控因素,弓網動態力P由受電弓結構與弓網耦合情況決定,對于既定結構受電弓,該值也不可調整。因此,可對靜態接觸力Fj進行補償,以提高弓網接觸力穩定性,進而提高受流質量,即:
2? ? 主動控制式受電弓設計
2.1? ? 基于弓網接觸力優化的主動控制系統
為了實現弓網接觸力的優化,即對低于設定值的實際弓網接觸力進行補償,需對受電弓的氣囊氣壓進行實時調整。結合高速受電弓運行經驗數據,各速度等級下的弓網接觸力目標值如圖1所示。
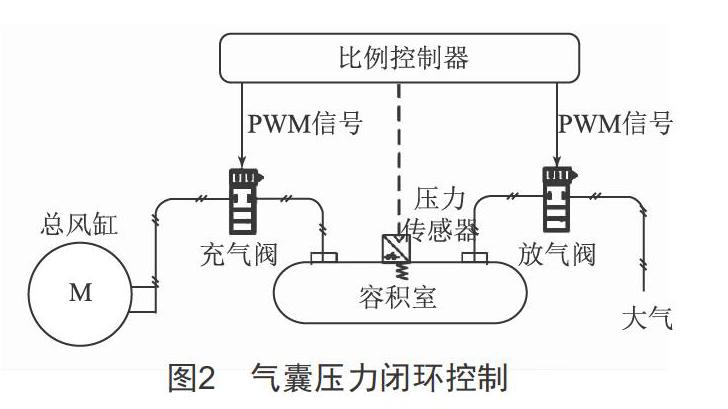
為將實際接觸力調整為目標值,需對氣囊壓力進行調整。氣囊壓力調整采用閉環控制,控制原理如圖2所示。根據壓力傳感器監測到的氣路壓力值與目標壓力值進行比對,控制系統對充氣閥與放氣閥進行動作控制,如果需要補氣,則充氣閥開啟,氣路從總風缸補氣提高壓力;如果需要排氣,則放氣閥開啟,將多余的氣排出。當氣囊壓力達到預設值時,受電弓的總體弓網接觸力也達到了目標接觸力。
由于受電弓的空氣抬升力與弓網動態力均與列車的運行速度、受電弓開閉口運行方向、受電弓安裝在列車的車廂位置、列車車型、列車編組等有直接聯系,因此,在接觸力目標值相同的條件下,以上條件發生改變時,氣囊的調整值并不相同。為了滿足受電弓調試與正常運行兩種情況,設定氣囊的調整值的獲得方法有兩種:一種是通過連接調試計算機,隨著車輛運行進行實時調整;另一種是通過線路試驗測量后,進一步優化匹配,形成與速度、受電弓、列車等信息相關的數據并存入系統,使用時可以直接調用。因此,基于弓網接觸力優化的主動控制系統總體功能如圖3所示。
(1)調試。在受電弓試驗及與車輛聯調時連接調試計算機,以對相關數據進行讀寫及系統維護,正常運營時無須連接調試計算機。(2)車輛通信。基于弓網接觸力優化的控制系統與車輛間采用數字信號進行通信。根據從車輛MVB通信中得到的動作命令判斷受電弓是否升弓,運行速度、受電弓與列車編組信息用于控制系統選取的氣囊壓力調整值(正常運行情況)。控制單元需將控制系統的故障信息及版本信息等反饋給車輛,以便車輛發現受電弓故障并記錄相關信息。(3)氣壓控制。基于弓網接觸力優化的控制系統對氣路單元的控制通過模擬信號進行控制。通過分析氣路單元中升弓電磁閥、壓力傳感器、壓力開關、高頻電控閥、增壓模塊、減壓模塊及快排電磁閥的信息,對增壓模塊、減壓模塊及快排電磁閥進行動作控制,以達到調整氣囊壓力的目的。
2.2? ? 主動控制式受電弓
結合以上控制系統,主動控制式受電弓的整體結構如圖4所示。受電弓為氣囊式受電弓,基本結構為四桿機構,安裝于車頂。受電弓的氣路氣壓調整單元與控制單元置于車內:受電弓控制單元可以與列車實現通信并控制氣壓調整,氣路氣壓調整采用閥組集成來實現,與受電弓控制單元結構合并安裝,成為主動控制單元。
3? ? 結語
為了提高高速動車組受電弓的弓網受流質量,對受電弓弓網接觸力及主動控制系統進行了研究,并設計了一種基于弓網接觸力優化的氣囊式主動控制受電弓,該受電弓可以調整氣囊氣壓,進而改變弓網接觸力,使高速動車組用的受電弓接觸力滿足設定的目標值,從而提高受電弓的受流穩定性。
[參考文獻]
[1] 吳燕.高速受電弓-接觸網動態性能及主動控制策略的研究[D].北京:北京交通大學,2011.
[2] 梅桂明.受電弓/接觸網垂向耦合動力學研究[D].成都:西南交通大學,2001.
[3] 萬嶸.弓網動態特性仿真研究[D].上海:華東交通大學,2013.
[4] 軌道交通 受流系統 受電弓與接觸網相互作用準則:TB/T 3271—2011[S].
[5] 姜靜,劉志剛,宋洋.考慮受電弓非線性的弓網動態特性仿真研究[J].計算機仿真,2015,32(2):170-174.
[6] 姚遠,郭迪龍,姚拴寶,等.高速受電弓非定常氣動特性分析[J].計算機輔助工程,2012,21(5):1-5.
[7] 周寧,張衛華.基于受電弓彈性體模型的弓網動力學分析[J].鐵道學報,2009,31(6):26-32.
[8] 郭京波,楊紹普,高國生.高速機車主動控制受電弓研究[J].鐵道學報,2004,26(4):41-45.
[9] 李瑞平,周寧,張衛華,等.受電弓氣動抬升力計算方法與分析[J].鐵道學報,2012,34(8):26-32.
[10] 蔡華.高速受電弓氣動系統主動控制技術研究[D].成都:西南交通大學,2013.
收稿日期:2020-12-28
作者簡介:孫云嵩(1987—),女,山東萊州人,工學碩士,工程師,研究方向:機械工程。
