基于條件隨機場的駕駛行為識別研究
2021-04-02 12:06:41趙巖陳煥明王亞倫
青島大學學報(工程技術版) 2021年1期
趙巖 陳煥明 王亞倫


摘要:? 為深入研究駕駛員駕駛行為特性,減少駕駛輔助系統與駕駛員的控制沖突,本文基于條件隨機場(conditional random field, CRF)算法,搭建了駕駛員駕駛行為識別模型。利用NI Phar Lap ETS實時操作系統,搭建車道保持輔助控制試驗平臺,在試驗平臺上進行相關參數的實時采集,并根據采集到的數據特性,提出一種根據橫向位移對駕駛行為數據進行分段的方法,將采集到的數據樣本劃分為左換道、右換道以及車道保持階段。同時,對實時獲取的參數進行顯著性分析,將與橫向運動密切相關的五種參數作為觀測參數,對駕駛行為進行識別。研究結果表明,車道保持、左換道以及右換道行為的識別率分別達942%,93%和844%。該研究對于提高車道保持輔助系統的輔助效果以及減少誤警率具有明顯的促進作用。
關鍵詞:? 駕駛行為; 條件隨機場; 駕駛模擬器; 觀測參數; 實時系統
中圖分類號: TP391.41; U467.5+1文獻標識碼: A
作者簡介: ?趙巖(1993-),男,山東濟寧人,漢族,碩士研究生,主要研究方向為高級輔助駕駛技術。
通信作者: ?陳煥明(1978-),男,山東青島人,博士,講師,碩士生導師,主要研究方向為汽車動態仿真與控制技術。 Email: qdchm@qdu.edu.cn
近年來,智能車輛的發展成為減少交通事故的理想方案。據世界衛生組織公布數據顯示[1],全球每年因交通事故造成的死亡人數高達135萬。作為智能車輛發展的重要部分,車道保持輔助技術的研發引起了我國的高度重視,于2017年發布了《汽車工業中長期發展規劃》。對駕駛員駕駛意圖的有效識別,可以提高車道保持系統的輔助效果。單純依靠偏離距離來進行車道偏離的判斷有嚴重的滯后性,易與駕駛者產生控制沖突。隨著深度學習的快速發展,針對上述問題,部分學者提出多種駕駛意圖識別算法,基于神經網絡的駕駛意圖識別,將車輛參數和駕駛員行為參數導入神經網絡中,通過對中間隱層層數和節點個數的調整,搭建意圖識別模型[24]。基于隱馬爾可夫模型(hidden markov model,HMM)的駕駛意圖識別,將一段時間序列的觀測參數作為輸入,訓練出不同駕駛意圖下的子模型[58]。而基于支持向量機(support vector machine,SVM)的駕駛意圖識別模型,通過核函數φ將觀測參數映射到高維空間,然后求解出能分隔駕駛意圖所對應的觀測參數的超平面,從而建立相應的駕駛意圖識別模型[912]。基于HMM的駕駛意圖識別模型在建模時,需要較強的嚴格獨立的假設條件[1315],而基于SVM的駕駛意圖識別模型則對樣本數量有要求[16],該方法對小樣本、非線性以及高維模式識別問題識別效果較好。鑒于上述存在的問題,周俊生等人[1719]采用條件隨機場(conditional random field, CRF)算法,搭建駕駛意圖識別模型,該方法不需要嚴格的獨立性假設,對樣本數量沒有嚴格限制。基于此,本文綜合利用CarSim、Matlab/Simulink和NI VeriStand軟件,搭建車道保持輔助控制試驗平臺,采集駕駛員駕駛行為數據及車輛橫向運動數據,進行駕駛員駕駛意圖識別模型的訓練及其驗證。該研究對減少交通事故的發生具有重要意義。
1試驗設計
實車數據采集方法需要對測試車輛進行改裝,加裝數據采集設備以及相應的傳感器(如車載攝像機、毫米波雷達、陀螺儀等),對測試天氣及道路環境具有較高的要求和一定程度的危險性。而研發型駕駛模擬器能夠將相關硬件嵌入其中,進行駕駛員主觀評價以及算法驗證,試驗周期短,試驗條件可控,安全性高。本文基于NI公司的Phar Lap ETS實時操作系統,搭建車道保持輔助控制試驗平臺,車道保持輔助控制試驗平臺如圖1所示。該試驗平臺能夠根據試驗要求,在CarSim軟件中搭建真實的駕駛場景,利用NI VeriStand實時測試軟件實現硬件I/O端口的實時配置,對車輛動態參數、行駛環境參數以及駕駛員駕駛行為數據進行實時采集。
根據《公路工程技術標準》,搭建10 000 m單向雙車道直道場景,考慮到需要以較高車速行駛,為提高駕駛場景與現實道路場景的相似度,將左右車道寬度均設置為375 m。在道路中央,每隔500 m設置錐形桶,提示駕駛員進行換道操作,換道時機由駕駛者自主決定,試驗道路布置如圖2所示。
近年來,由于非職業駕駛員數量的急劇增加,其已成為交通事故劇增的主要群體,主要原因是一些駕駛新手的駕駛水平較低,缺乏對駕駛環境的準確判斷,難以做出適當的駕駛行為,易發生交通事故。因此,本文招募了10名駕齡在2~5年的男性駕駛員,駕駛員需滿足以下條件,即持有駕駛證、性格穩定、近期具有實車駕駛經歷。試驗前,對駕駛員進行一定時長的培訓,使駕駛員熟悉試驗平臺以及道路場景,避免因操作失誤造成數據采集異常。為深入研究駕駛行為與駕駛意圖的潛在關系,將采樣率設置為100 Hz,某時間段內采集的數據如表1所示。
2駕駛行為分析
駕駛行為的有效識別對于車輛感知系統提前感知行駛環境,做出準確的路徑規劃以及輔助控制具有重要作用。駕駛過程是連續多變的動態變化過程,不同的駕駛行為會引起不同的車輛動態參數和駕駛行為參數變化,因此可以通過選取適當的參數,對不同的駕駛行為進行預測及識別,駕駛行為數據的劃分及駕駛意圖表征參數的選取直接影響識別的準確度。
2.1駕駛行為數據的劃分
選定的觀測變量是否能有效區分換道狀態與車道保持狀態,與觀測數據的劃分以及識別參數的選取密切相關。目前,對于換道行為數據與車道保持行為數據的劃分沒有統一的定義,為提高換道行為的識別率,從采集到的數據特征出發,提出一種根據橫向位置來劃分數據的方法,換道階段數據劃分示意圖如圖3所示。首先根據采集到的數據分別計算出車輛行駛在左車道和右車道的車輛橫向位置的均值,然后選取換道過程中橫向位置數據符號變化的兩點,繪出階段劃分線,該線與左右車道車輛橫向位置均值線有兩個交點,將兩個交點間的數據作為換道階段的數據,交點以外的數據作為車道保持階段數據。
2.2駕駛意圖表征參數的選取
在實際駕駛過程中,駕駛員駕駛行為會受到多方面的影響。在人-車-路構成的閉環系統中,任意環節的細微變化都會造成駕駛行為的改變,隨機性較大,無法對其精確建模。通過相關研究發現,在一些特定的駕駛場景中,駕駛過程中產生的車輛運動參數、駕駛員行為參數以及道路環境參數的變化可以在一定程度上反映駕駛者的駕駛行為,通過傳感器獲取可以表征駕駛行為的參數,可以有效的識別駕駛員的駕駛意圖。
本文獲取了車道保持階段與車道變更階段的相關參數,并對相關參數的均值和標準差進行對比,考慮到過多的觀測參數會加大駕駛意圖識別模型的學習難度,影響意圖識別的時效性,并且換道對橫向運動參數影響較大,因此選取方向盤轉角(°)、方向盤轉角速率(°/s)、橫向速度(km/h)、橫向加速度(m/s2)以及橫向位置(m)作為觀測特征參數。
參數選定后,需要檢驗所選參數是否能夠表征不同的駕駛意圖,即進行顯著性檢驗。在駕駛意圖識別過程中,各觀測變量的差異性越大,識別的精確度越高。因此,選取的五種觀測參數對應不同的駕駛意圖應該具有顯著差別。利用箱式圖分析五種參數在左換道、車道保持、右換道三種駕駛行為下的差異性,各參數箱式圖如圖4所示。
由圖4可以看出,左右換道階段的數據與車道保持階段數據差異性非常明顯,在車道保持階段,駕駛員為使車輛在車道中間行駛,會對方向盤進行微調,因此方向盤轉角、方向盤轉角速率、橫向速度、橫向加速度以及橫向位置的波動范圍較小。在換道階段,車輛發生橫向位置的改變,因此方向盤轉角、方向盤轉角速率、橫向速度、橫向加速度以及橫向位置都會發生大范圍的波動,與車道保持階段具有明顯的差異性。因此,選取的五種觀測參數可以很好的表征三種駕駛意圖。
3換道意圖識別模型的搭建
CRF模型是在最大熵模型(maximum entropy model,MEM)和HMM的基礎上,提出的一種判別式概率無向圖學習模型,是一種用于標注和切分有序數據的條件概率模型。條件隨機場模型解決了HMM的觀測獨立性假設,因而可以容納任意的上、下文信息,并且特征設計靈活,可在全局范圍內統計歸一化的概率。
本研究將駕駛狀態分為車道保持、左換道和右換道三種,因此nStates=3。由上文可知,選取與換道行為相關的五種橫向運動參數作為觀測值,因此D=5。機場模型是一種判別式概率無向圖學習模型,在有限的樣本條件下,也可以得出較高的識別率,CRF算法識別駕駛意圖流程如圖6所示。
3.2駕駛意圖識別與驗證
在Matlab軟件中,搭建基于liner-chain CRF算法的駕駛意圖識別模型,并在該軟件中進行模型訓練與測試。根據第三章對于觀測數據劃分方法,為識別駕駛員完整的換道行為,提取從車道保持階段到換道階段再到車道保持階段的數據作為輸入樣本,根據采集到的觀測數據特性以及駕駛員的平均換道時間,以換道階段左交點前4 s左右的觀測數據為起始點,向后取10 s為一組樣本,一組樣本包含兩次車道保持和一次換道,通過對采集到的數據進行篩選,得含完整換道行為數據樣本84組,按照3∶1的比例劃分為訓練數據和測試數據,數據集如表3所示。
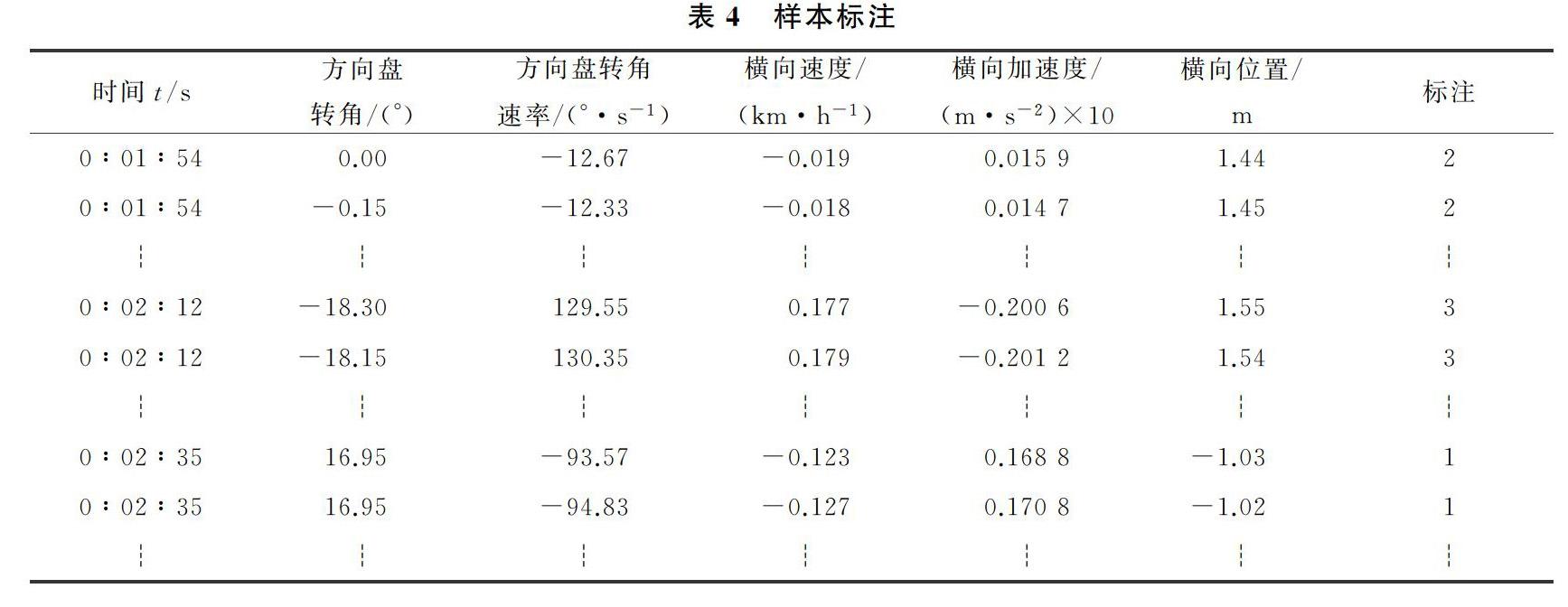
根據CRF算法特性,需對不同的駕駛行為階段數據進行標注,根據橫向位置劃分駕駛行為數據的方法,對篩選出的完整駕駛行為數據進行標注,即將右換道階段的數據標注為“3”,車道保持階段的數據標注為“2”,左換道階段的數據標注為“1”。樣本標注如表4所示。
根據上文所述,將標注好的數據集導入liner-chain CRF駕駛意圖識別模型中,其中一組為左換道數據測試結果,CRF識別結果如圖7所示。圖7中,“LK”代表車輛處于車道保持狀態,“RLC”表示車輛處于左換道狀態,CRF識別的駕駛狀態由計算出的車道保持概率決定,當概率值小于50%時,認定此時處于換道狀態,當大于50%時,認定處于車道保持狀態,但在概率值接近05的位置會出現識別異常,通過減少觀測參數,將觀測參數改為方向盤轉角、方向盤轉角速率、橫向速度以及橫向加速度,即D=4,改進后識別結果如圖8所示。
由圖8可以看出,適當減少觀測參數的數量,有益于提高識別精度,減少駕駛意圖識別時間。
將測試樣本導入訓練好的駕駛意圖識別模型中,測試結果如表5所示。
由表5可以看出,駕駛員駕駛行為識別liner-chain CRF模型在樣本量較小的情況下,也可以達到較高的識別精度,在以橫向位置劃分駕駛行為數據的情況下,劃分車道保持和左換道行為識別率達90%以上,右換道意圖的識別率達84%,鑒于駕駛行為數據的劃分以及駕駛意圖表征參數的選取對識別精度的直接影響,考慮可能是由于擬合點較少,擬合精度低造成右換道階段數據劃分誤差較大,使右換道識別率較低。
4結束語
本文搭建了基于線性鏈條件隨機場駕駛意圖識別模型,并通過采集到的數據,提出了一種根據橫向位置劃分時間序列的方法。與傳統的駕駛意圖識別算法相比,該駕駛意圖識別模型對訓練樣本數量的要求更低,且更符合實際情況。通過模型訓練與測試,該模型能夠有效識別車道保持、左換道以及右換道三種駕駛意圖。針對右換道意圖識別率較低的問題,下一步將從駕駛意圖識別算法的改進和駕駛行為階段劃分方法的優化兩方面進行研究。
參考文獻:
[1]World Health Organization. Global status report on road safety[R]. Geneva: WHO, 2018.
[2]倪捷, 劉志強. 基于駕駛人決策機制的換道意圖識別模型[J]. 交通運輸系統工程與信息, 2016, 16(1): 58-63.
[3]劉松波, 白國振. 基于BP神經網絡的HEV加速意圖識別[J]. 農業裝備與車輛工程, 2017, 55(10): 88-91.
[4]曲代麗. 基于模糊神經網絡的駕駛員制動意圖辨識技術研究[D]. 長春: 長春工業大學, 2016.
[5]劉志強, 吳雪剛, 倪捷, 等. 基于HMM和SVM級聯算法的駕駛意圖識別[J]. 汽車工程, 2018, 40(7): 858-864.
[6]Li K, Wang X, Xu Y, et al. Lane changing intention recognition based on speech recognition models[J]. Transportation Research Part C Emerging Technologies, 2016, 69(8): 497-514.
[7]宋曉琳, 鄭亞奇, 曹昊天. 基于HMM-SVM的駕駛員換道意圖辨識研究[J]. 電子測量與儀器學報, 2016, 30(1): 58-65.
[8]馮頡. 面向汽車安全輔助系統的駕駛員意圖識別算法研究[D]. 成都: 電子科技大學, 2013.
[9]李慧, 李曉東, 宿曉曦. 一種優化參數的支持向量機駕駛意圖識別[J]. 實驗室研究與探索, 2018, 37(2): 35-39.
[10]畢勝強, 梅德純, 劉志強, 等. 面向駕駛行為預警的換道意圖辨識模型研究[J]. 中國安全科學學報, 2016, 26(2): 91-95.
[11]劉志強, 涂孝軍, 汪澎. 面向駕駛員輔助系統的換道意圖辨識方法研究[J]. 安全與環境學報, 2015, 15(6): 132-136.
[12]麻婷婷, 涂孝軍, 朱偉達. 基于支持向量機的駕駛員超車意圖識別[J]. 上海工程技術大學學報, 2016(30): 203-208.
[13]張明恒, 翟曉娟, 朱有明, 等. 基于改進HMM的駕駛疲勞險態識別方法[J]. 大連理工大學學報, 2018, 58(2): 194-201.
[14]徐婷, 溫常磊, 張香, 等. 基于GMM-CHMM的城市道路換道行為識別[J]. 交通運輸系統工程與信息, 2020, 20(1): 61-67.
[15]張海倫, 付銳. 高速場景相鄰前車駕駛行為識別及意圖預測[J]. 交通運輸系統工程與信息, 2020, 20(1): 40-46.
[16]馬國成, 劉昭度, 裴曉飛, 等. 基于模糊支持向量機的旁車道車輛并線意圖識別方法[J]. 汽車工程, 2014, 36(3): 316-320.
[17]周俊生, 戴新宇, 尹存燕, 等. 基于層疊條件隨機場模型的中文機構名自動識別[J]. 電子學報, 2006, 34(5): 804-809.
[18]葉子豪, 孫銳, 王慧慧. 基于全卷積神經網絡與條件隨機場的車道識別方法[J]. 光電工程, 2019, 46(2): 180274-180286.
[19]徐曉芳. 基于條件隨機場的中文分詞技術的研究與實現[D]. 南京: 南京郵電大學, 2018.
[20]Schmidt M, Swersky K. Matlab code for chain-structured conditional random fields with categorical features [EB/OL]. https: ∥www. cs. ubc. ca/~schmidtm/Software/crfChain. html, 2008.
Abstract:?? In order to deeply explore the characteristics of the driver's driving behavior and reduce the control conflict between the driving assistance system and the driver, this paper builds a driver's driving behavior recognition model based on the Conditional Random Field algorithm. It use NI Phar Lap ETS real-time operating system to build a lane keeping auxiliary control test platform, and collects relevant parameters in real time on the test platform. According to the characteristics of the collected data, a method of segmenting driving behavior data based on lateral displacement is proposed, and the collected data samples are divided into left lane changing, right lane changing and lane keeping stages. The significance of the parameters acquired in real time is analyed, and the driving behavior is identified by using five parameters closely related to lateral motion as observation parameters. The results show that the recognition rates of lane keeping, left lane changing and right lane changing behavior are respectively 94.2%, 93% and 84.4%. This research has a significant role in improving the assistive effect of the lane keeping assist system and reducing the false alarm rate.
Key words: driving behavior; conditional random field; driving simulator; observation parameters; real-time system