閉環(huán)式電控空氣懸架系統(tǒng)控制策略研究及驗(yàn)證
2021-04-02 12:06:41張旗嚴(yán)天一趙巖樂
關(guān)鍵詞:控制策略
張旗 嚴(yán)天一 趙巖樂
摘要:? 為提高車輛行駛平順性及燃油經(jīng)濟(jì)性,本文主要對閉環(huán)式電控空氣懸架系統(tǒng)控制策略進(jìn)行研究。介紹了閉環(huán)式電控空氣懸架系統(tǒng)的工作原理,利用Matlab/Simulink構(gòu)建閉環(huán)式電控空氣懸架系統(tǒng)整車動力學(xué)模型和Stateflow開發(fā)車身高度控制策略。對空氣彈簧進(jìn)行合理地充氣和放氣,在三種不同位置實(shí)現(xiàn)車身高度的實(shí)時(shí)調(diào)節(jié)。同時(shí)為驗(yàn)證所建閉環(huán)式電控空氣懸架整車動力學(xué)模型的正確性及其控制策略的有效性,對其進(jìn)行離線和硬件在環(huán)仿真。實(shí)驗(yàn)結(jié)果表明,在自動模式下,空氣彈簧能夠根據(jù)車速自動選擇充放氣,使車身達(dá)到合適的高度位置。在手動模式下,駕駛員能夠自主設(shè)定懸架位置,從而提高了車輛行駛平順性和燃油經(jīng)濟(jì)性;在兩種模式下仿真結(jié)果相比,車身高度變化量總體趨勢接近,驗(yàn)證了所開發(fā)控制策略的有效性。該研究對車輛行駛平順性及燃油經(jīng)濟(jì)性的提高具有重要意義。
關(guān)鍵詞:? 閉環(huán)式電控空氣懸架; 控制策略; 電子控制單元; 硬件在環(huán)仿真
中圖分類號: U463.33文獻(xiàn)標(biāo)識碼: A
作者簡介: ?張旗(1995-),男,碩士研究生,主要研究方向?yàn)槠噭討B(tài)仿真與控制技術(shù)。
通信作者: ?嚴(yán)天一(1970-),男,工學(xué)博士,教授,主要研究方向?yàn)檐囕v系統(tǒng)動力學(xué)及其控制技術(shù)。 Email: yan_7012@126.com
隨著人們對車輛行駛平順性及燃油經(jīng)濟(jì)性要求的不斷提高,電控空氣懸架在汽車上的應(yīng)用越發(fā)普遍[1]。與傳統(tǒng)的機(jī)械式懸架相比,電控空氣懸架通過對空氣彈簧充、放氣實(shí)現(xiàn)車身高度的調(diào)節(jié),從而提高車輛的通過性及燃油經(jīng)濟(jì)性。由于空氣彈簧充、放氣回路型式不同,有開環(huán)式電控空氣懸架系統(tǒng)和閉環(huán)式電控空氣懸架系統(tǒng)[2],放氣時(shí),開環(huán)式電控空氣懸架系統(tǒng)將空氣彈簧的氣體直接排入大氣,造成能量消耗,并產(chǎn)生噪聲。閉環(huán)式電控空氣懸架系統(tǒng)其充、放氣回路是封閉的,當(dāng)空氣彈簧需要充氣時(shí),氣體介質(zhì)來源于儲氣筒中的壓縮氣體。放氣時(shí),空氣彈簧內(nèi)具有一定壓力的氣體介質(zhì)則被重新泵回至儲氣筒中,實(shí)現(xiàn)了氣體介質(zhì)的循環(huán)使用。閉環(huán)式電控空氣懸架系統(tǒng)在工作過程中能量消耗大為減少,顯著降低了噪聲與振動[35]。針對懸架系統(tǒng)的控制策略,國內(nèi)外已開展了相關(guān)研究。陳龍等人[6]提出一種基于阻尼多模式切換減振器的車輛半主動懸架及其控制方法;李海燕等人[7]提出了兩種不同車身步進(jìn)控制算法,得到各個車身高度的目標(biāo)高度,利用比例積分微分控制(proportional-integral-derivative control,PID),控制器對電磁閥的電流信號占空比進(jìn)行調(diào)節(jié),解決了閉環(huán)空氣懸架系統(tǒng)較大俯仰角問題;馬志敏等人[8]利用AMEsim和Simulink建模,通過改變懸架剛度,改善車輛乘坐舒適性;關(guān)欣[9]針對車身高度調(diào)節(jié)中電控空氣懸架充排氣而產(chǎn)生的非線性特性,設(shè)計(jì)了模糊控制器,并與電控空氣懸架系統(tǒng)模型進(jìn)行聯(lián)合仿真,消除了高度誤差;P. K. Eskandary等人[10]提出一種新型空氣懸架系統(tǒng),其包括兩個氣室,通過控制兩個氣室中的氣壓,可同時(shí)改變懸架剛度和車身高度;D. Ha等人[11]提出一種基于閉環(huán)式電控空氣懸架的高度傳感器故障診斷算法和隔離算法,并進(jìn)行仿真和車輛試驗(yàn);Yang N[12]建立1/4車輛懸架剛度調(diào)節(jié)模型,并設(shè)計(jì)了PID控制策略,該控制器減小了簧載質(zhì)量的垂直加速度,改善了行駛平順性。因此,本文基于Matlab/Simulink,建立閉環(huán)式電控空氣懸架系統(tǒng)整車動力學(xué)模型,利用Stateflow開發(fā)閉環(huán)式電控空氣懸架系統(tǒng)車身高度控制策略,包括自動和手動兩種模式,通過離線仿真與硬件在環(huán)仿真,驗(yàn)證了所開發(fā)控制策略的有效性。
1閉環(huán)式電控空氣懸架系統(tǒng)工作原理與建模
1.1閉環(huán)式電控空氣懸架系統(tǒng)工作原理
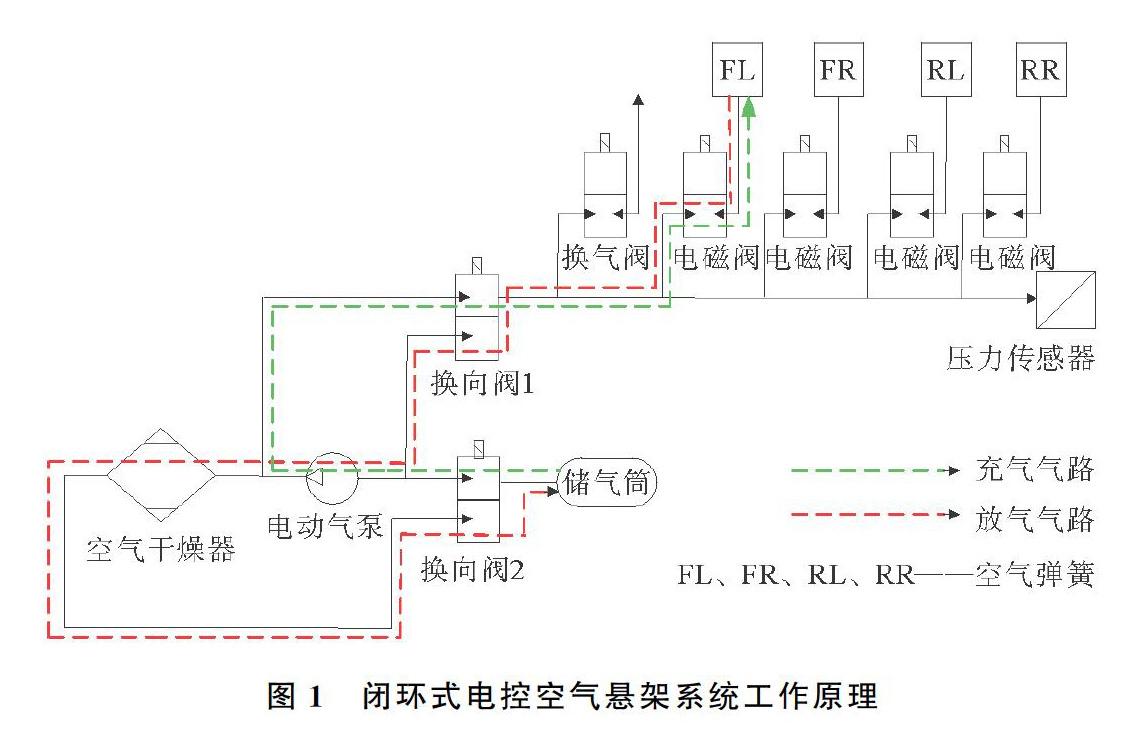
閉環(huán)式電控空氣懸架系統(tǒng)的充、放氣回路是封閉的,當(dāng)車身需要升高時(shí),儲存于儲氣筒中的壓縮空氣源經(jīng)換向閥2、電動氣泵、換向閥1,并經(jīng)過組合電磁閥進(jìn)入相應(yīng)空氣彈簧內(nèi),實(shí)現(xiàn)升高車身的目的。當(dāng)其達(dá)到控制策略中設(shè)定的車身高度閾值時(shí),關(guān)閉相應(yīng)換向閥、電磁閥,并停止電動氣泵工作,充氣結(jié)束;當(dāng)車身高度需
要降低時(shí),空氣彈簧內(nèi)具有一定壓力的氣體介質(zhì)經(jīng)組合電磁閥、換向閥1、電動氣泵、空氣干燥器、換向閥2,重新回到儲氣筒中,車身高度逐漸降低,且達(dá)到控制策略中設(shè)定的車身高度閾值時(shí),相應(yīng)換向閥、電磁閥及電動氣泵等停止工作,空氣彈簧放氣動作結(jié)束。當(dāng)壓力傳感器檢測到儲氣筒壓力不足時(shí),外部氣體可經(jīng)過換氣閥、換向閥1、電動氣泵、空氣干燥器及換向閥2進(jìn)入儲氣筒,使其壓力達(dá)到可為空氣彈簧充、放氣的要求[1315]。閉環(huán)式電控空氣懸架系統(tǒng)工作原理如圖1所示。
2電控空氣懸架系統(tǒng)控制策略開發(fā)
2.1電控空氣懸架系統(tǒng)控制策略
本文采用Stateflow開發(fā)閉環(huán)電控空氣懸架車身高度控制策略,所開發(fā)的控制策略包括兩種模式,其中自動模式下,要求車輛能夠根據(jù)不同的車速自動調(diào)節(jié)空氣彈簧進(jìn)行充放氣,從而改變懸架高度。手動模式下,駕駛員可以自行設(shè)定懸架高度。
2.2自動模式子模塊
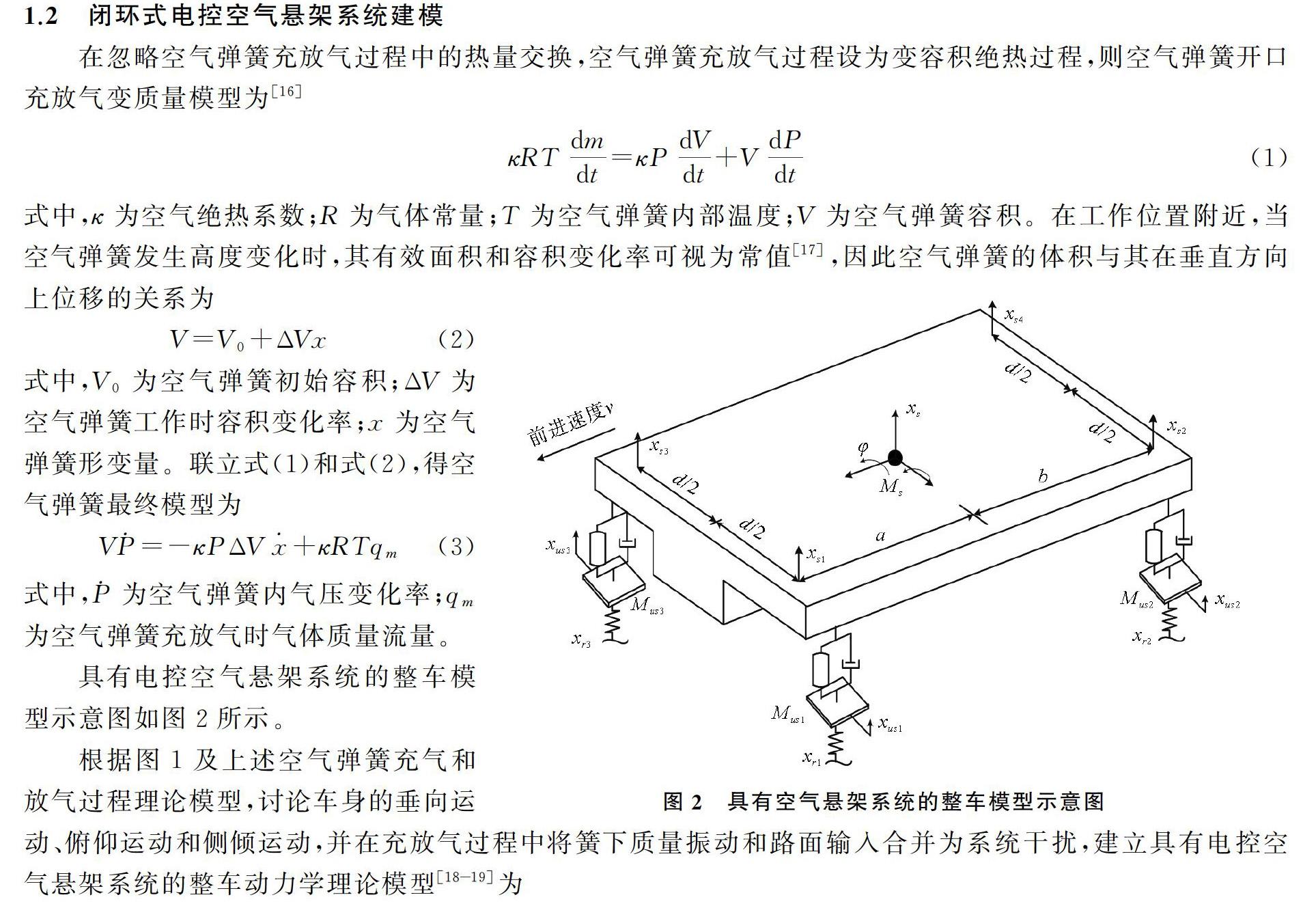
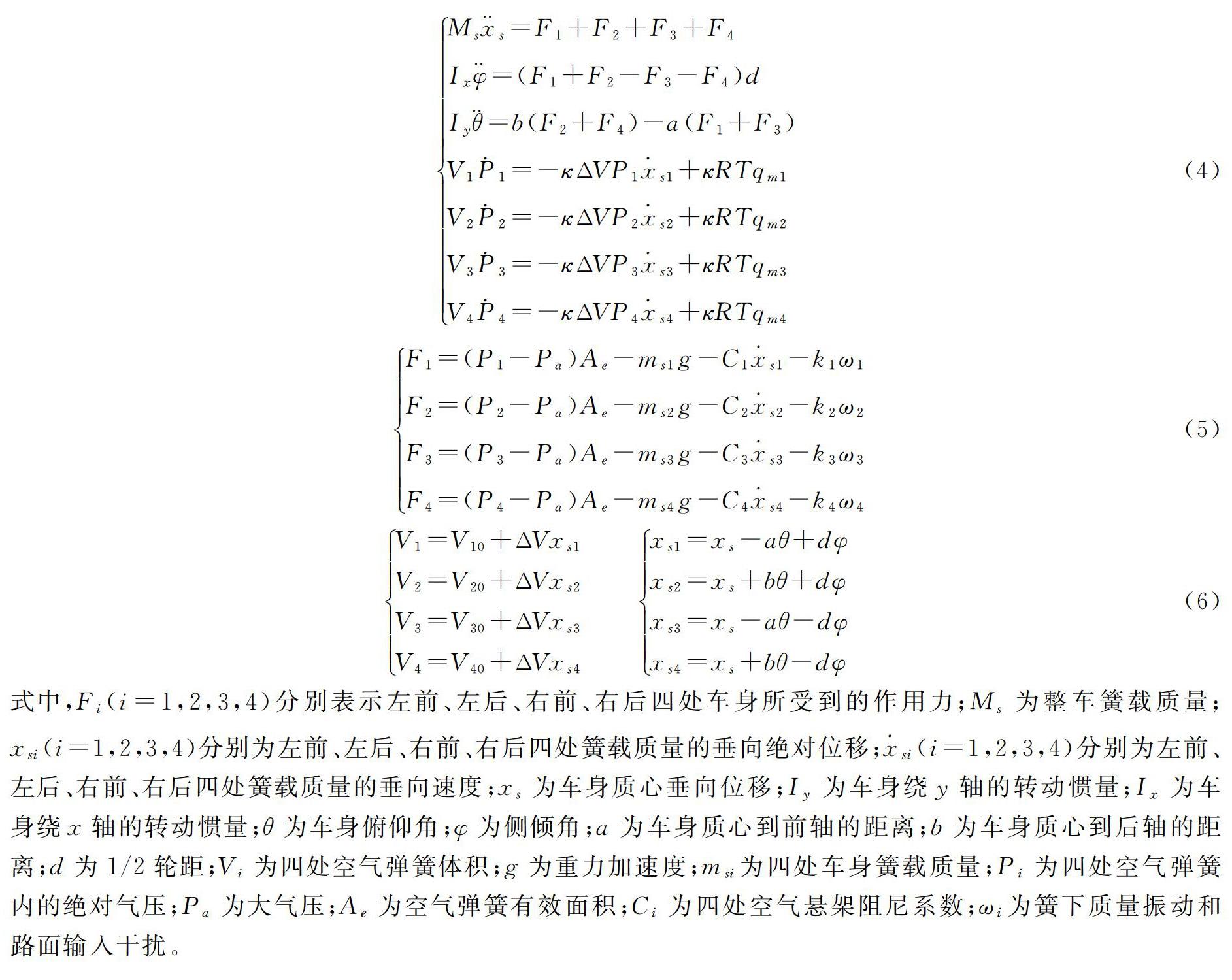
自動模式下,設(shè)定當(dāng)車速v<60 km/h時(shí),懸架處于高位,當(dāng)60 km/h≤v≤90 km/h,懸架處于中位,當(dāng)90 km/h 2.3手動模式子模塊 手動模式下,駕駛員可以自主設(shè)定懸架位置,當(dāng)M_Mode等于0時(shí),懸架處于高位;當(dāng)M_Mode等于1時(shí),懸架處于中位;當(dāng)M_Mode等于2時(shí),懸架處于低位。當(dāng)車身實(shí)際高度小于期望高度時(shí),儲氣筒對空氣彈簧充氣,當(dāng)車身實(shí)際高度大于期望高度時(shí),空氣彈簧放氣。手動模式控制策略如圖5所示,手動模式下高位控制策略如圖6所示,中位和低位的控制策略與高位類似。 3離線仿真及硬件在環(huán)仿真試驗(yàn) 3.1離線仿真 為驗(yàn)證所建閉環(huán)式電控空氣懸架整車動力學(xué)模型的正確性及其控制策略的有效性,對其進(jìn)行離線仿真,整車動力學(xué)模型主要參數(shù)[19]如表1所示。 1)在自動模式下進(jìn)行離線仿真。設(shè)定仿真車速,自動模式車速信號如圖7所示,在自動模式下輸出左前車身高度,自動模式車身高度結(jié)果如圖8所示。 由圖7和圖8可以看出,在0~20 s內(nèi),車速從0上升到60 km/h,此時(shí)儲氣筒對空氣彈簧進(jìn)行充氣,懸架達(dá)到高位,車身高度穩(wěn)定在40 mm左右;在20~80 s內(nèi),車速在60~90 km/h,此時(shí)空氣彈簧先進(jìn)行放氣,懸架達(dá)到中位,車身高度穩(wěn)定在0 mm左右;在80~100 s內(nèi),車速上升到120 km/h,空氣彈簧放氣直到懸架達(dá)到低位,車身高度穩(wěn)定在-40 mm左右。離線仿真結(jié)果表明,自動模式下空氣彈簧能夠根據(jù)車速自動選擇充放氣,從而使車身達(dá)到合適高度。 2)手動模式下離線仿真。設(shè)定M_Mode參數(shù),手動模式M_Mode參數(shù)如圖9所示,手動模式下輸出左前車身高度,手動模式車身高度結(jié)果如圖10所示。 由圖9和圖10可以看出,在0~30 s內(nèi),M_Mode等于0,此時(shí)儲氣筒對空氣彈簧進(jìn)行充氣,懸架達(dá)到高位,車身高度穩(wěn)定在40 mm左右;在30~60 s內(nèi),M_Mode等于1,此時(shí)空氣彈簧先進(jìn)行放氣,懸架達(dá)到中位,車身高度穩(wěn)定在0 mm左右;在60~100 s內(nèi),M_Mode等于2,空氣彈簧放氣直到懸架達(dá)到低位,車身高度穩(wěn)定在-40 mm左右。 3.2硬件在環(huán)仿真 為進(jìn)一步驗(yàn)證利用Stateflow開發(fā)的車身高度控制策略的有效性,并與離線仿真進(jìn)行對比,對控制策略進(jìn)行硬件在環(huán)試驗(yàn)。首先在上位機(jī)中利用Matlab/Simulink和Vehicle Network Toolbox建立整車動力學(xué)硬件在環(huán)仿真模型,并利用電動氣泵、組合閥、儲氣筒、空氣懸架電子控制單元、Kvaser Leaf Light v2通訊模塊等搭建硬件在環(huán)試驗(yàn)系統(tǒng)。閉環(huán)式電控空氣懸架硬件在環(huán)仿真試驗(yàn)系統(tǒng)如圖11所示。 閉環(huán)式電控空氣懸架系統(tǒng)電子控制單元以恩智浦公司16位MC9S12XDT512單片機(jī)為主控芯片,該芯片包含512 kB Flash,20 kB RAM,4kB EEPROM,內(nèi)部結(jié)構(gòu)集成6個SCI,3個CAN通信,8位、10位精度可選的A/D模塊,PWM及ECT模塊。該電子控制單元主要由最小系統(tǒng)、電源模塊、電動氣泵驅(qū)動模塊、電磁閥驅(qū)動模塊、模擬量輸入保護(hù)模塊、CAN通訊模塊等組成。電磁閥驅(qū)動模塊和電動氣泵驅(qū)動模塊選用NUD3112芯片,其中電磁閥是由該芯片直接驅(qū)動,電動氣泵由于工作時(shí)電流較大,用NUD3112芯片驅(qū)動繼電器,從而實(shí)現(xiàn)對電動氣泵的控制。電源模塊選用TLE4284DV33和TLE4284DV50,它們可將12 V電壓分別轉(zhuǎn)換為33 V和50 V電壓,最大輸出電流達(dá)到800 mA,滿足控制器功率需求。模擬量輸入模塊采用BAT54S芯片實(shí)現(xiàn)對模擬量信號的限壓保護(hù),利用其鉗位功能防止輸入信號過壓,影響主控芯片的正常使用。CAN通訊模塊選用TJA1050芯片高速CAN收發(fā)器,為了提高通信的抗干擾能力及可靠性,CAN總線兩端接有120 Ω終端電阻,電源與地之間接有濾波電容[20]。 對閉環(huán)式電控空氣懸架系統(tǒng)車身高度控制策略進(jìn)行硬件在環(huán)仿真試驗(yàn),并與離線仿真進(jìn)行對比,仿真工況與離線仿真時(shí)工況一致,自動模式離線仿真與硬件在環(huán)試驗(yàn)結(jié)果如圖12所示,手動模式離線仿真與硬件在環(huán)試驗(yàn)結(jié)果如圖13所示。 由圖12和圖13可以看出,在自動模式和手動模式下,硬件在環(huán)仿真結(jié)果與離線仿真結(jié)果相比,車身高度變化量總體趨勢接近,表明所構(gòu)建的閉環(huán)式電控空氣懸架系統(tǒng)模型的正確性及開發(fā)的車身高度控制策略的有效性。 4結(jié)束語 本文利用Matlab/Simulink搭建閉環(huán)式電控空氣懸架系統(tǒng)整車動力學(xué)模型,采用Stateflow開發(fā)車身高度控制策略,對自動模式及手動模式進(jìn)行了離線仿真。自動模式下,車速從0增加到120 km/h,車身高度從40 mm下降到-40 mm;手動模式下,駕駛員可自主設(shè)定車身高度,實(shí)驗(yàn)數(shù)據(jù)表明所開發(fā)控制策略的有效性。最后設(shè)計(jì)了閉環(huán)式電控空氣懸架系統(tǒng)車身高度電子控制單元及其硬件在環(huán)仿真試驗(yàn)系統(tǒng),通過硬件在環(huán)仿真與離線仿真結(jié)果對比,進(jìn)一步驗(yàn)證了開發(fā)控制策略的有效性。另外,為實(shí)驗(yàn)研究的進(jìn)一步完善,仍需從實(shí)車試驗(yàn)中提取相關(guān)的實(shí)驗(yàn)數(shù)據(jù)。 參考文獻(xiàn): [1]李志昌. ECAS汽車的車身高度調(diào)節(jié)與平順性研究[D]. 鎮(zhèn)江: 江蘇科技大學(xué), 2017. [2]邱亞東. 高低壓罐氣路閉環(huán)空氣懸架車身高度調(diào)節(jié)與能耗特性研究[D]. 鎮(zhèn)江: 江蘇大學(xué), 2014. [3]江洪, 楊勇福, 王玉杰, 等. 氣路閉環(huán)互聯(lián)空氣懸架車高控制與能耗特性試驗(yàn)[J]. 中南大學(xué)學(xué)報(bào): 自然科學(xué)版, 2017, 48(1): 270-276. [4]江洪, 錢寬, 邱亞東, 等. 氣路閉環(huán)空氣懸架系統(tǒng)能量損耗建模及分析[J]. 中國機(jī)械工程, 2014, 25(23): 3239-3244. [5]竇輝, 陳龍, 汪少華, 等. 電控閉式空氣懸架車高調(diào)節(jié)控制研究[J]. 機(jī)械設(shè)計(jì)與制造, 2014 (9): 171-174. [6]陳龍, 馬瑞, 王壽靜, 等. 車輛半主動懸架阻尼多模式切換控制研究[J]. 振動與沖擊, 2020, 39(13): 148-155. [7]李海燕, 張鋒, 汪涵, 等. 閉環(huán)空氣懸架系統(tǒng)的車身高度與姿態(tài)控制[J]. 華僑大學(xué)學(xué)報(bào): 自然科學(xué)版, 2019, 40(2): 141-147. [8]馬志敏, 苑慶澤, 吳作柱, 等. 電控空氣懸架系統(tǒng)剛度調(diào)節(jié)預(yù)瞄算法研究[J]. 機(jī)械科學(xué)與技術(shù), 2019, 38(3): 398-403. [9]關(guān)欣. 基于半實(shí)物仿真平臺的電控懸架控制策略研究[D]. 沈陽: 沈陽理工大學(xué), 2018. [10]Karimi Eskandary P, Khajepour A, Wong A, et al. Analysis and optimization of air suspension system with independent height and stiffness tuning[J]. International Journal of Automotive Technology, 2016, 17(5): 807-816. [11]Ha D, Kim H, Lee H. Height sensor fault diagnosis for electronic air suspension (EAS) system[C]∥IEEE International Symposium on Industrial Electronics. Seoul in Korea: IEEE, 2009: 44-57. [12]Yang N. Research on air suspension system based on PID control[C]∥International Conference on Intelligent Human-Machine Systems and Cybernetics. Hangzhou: IEEE, 2013: 106-109. [13]何二寶, 杜群貴. 閉環(huán)空氣懸架系統(tǒng)車高調(diào)節(jié)建模與能耗分析[J]. 機(jī)械設(shè)計(jì)與制造, 2012(5): 45-47. [14]嚴(yán)天一, 李聰聰, Cho X H, 等. 基于模型的電控空氣懸架系統(tǒng)控制策略與實(shí)車試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2017, 48(5): 385-389. [15]程崇. 空氣彈簧的力學(xué)特性及空氣懸架的主動控制策略研究[D]. 哈爾濱: 東北林業(yè)大學(xué), 2016. [16]王顏麗, 黃松和. 空氣懸架充放氣過程的動態(tài)特性研究[J]. 機(jī)械, 2017, 44(10): 24-28. [17]王鵬程. 基于智能體理論的空氣懸架車身高度控制系統(tǒng)研究[D]. 鎮(zhèn)江: 江蘇大學(xué), 2019. [18]Ma X, Wong P K, Zhao J, et al. Design and testing of a nonlinear model predictive controller for ride height control of automotive semi-active air suspension systems[J]. IEEE Access, 2018(6): 63777-63793. [19]單海強(qiáng). 基于模型的ECAS系統(tǒng)執(zhí)行器故障診斷與容錯控制研究[D]. 鎮(zhèn)江: 江蘇大學(xué), 2018. [20]王明武, 楊帆, 梁應(yīng)選, 等. 基于CAN總線的智能電子脈沖攔魚裝置設(shè)計(jì)[J]. 現(xiàn)代電子技術(shù), 2020, 43(18): 75-79, 84. Abstract:?? In order to improve vehicle ride comfort and fuel economy, this paper mainly studies the control strategy of closed-loop electronic control air suspension system. The working principle of the closed-loop electronically controlled air suspension system is introduced. The vehicle dynamic model of the closed-loop electronically controlled air suspension system is constructed by using Matlab/Simulink, and the body height control strategy is developed by Stateflow. The air spring is inflated and deflated reasonably to realize the real-time adjustment of body height in three different positions. At the same time, in order to verify the correctness of the vehicle dynamics model and the effectiveness of the control strategy, off-line and hardware-in-the-loop simulation are carried out. The experimental results show that, in the automatic mode, the air spring can automatically select the charging and discharging according to the vehicle speed to make the body reach the appropriate height position. In the manual mode, the driver can set the suspension position independently, which improves the ride comfort and fuel economy of the vehicle; In comparison of the simulation results in the two modes, the overall trend of the body height change is similar, which verifies the effectiveness of the control strategy developed. The research is of great significance to the improvement of vehicle ride comfort and fuel economy. Key words: closed loop electronically controlled air suspension; control strategy; electronic control unit; hardware-in-the-loop simulation
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36