基于Prescan的信號燈路口跟停場景虛擬重構(gòu)
2021-04-05 09:25:06張慧劉興亮黃昆付會通楊路鵬
汽車文摘 2021年4期
張慧 劉興亮 黃昆 付會通 楊路鵬
(中國汽車技術(shù)研究中心有限公司,天津300300)
主題詞:跟停場景 場景虛擬重構(gòu) 神經(jīng)網(wǎng)絡(luò) 智能網(wǎng)聯(lián)
縮略語
EuroFOT European Field Operational Test
China-FOT China Field Operational Test
BSD Blind Spot Decision
TTC Time To Collision
1 前言
根據(jù)奔馳、寶馬、特斯拉等知名廠商研發(fā)經(jīng)驗(yàn),智能駕駛技術(shù)主要包括3個(gè)步驟:道路測試、場景挖掘、場景虛擬重構(gòu)。其中,道路測試旨在積累自然駕駛數(shù)據(jù)的歷程,如歐洲大型實(shí)車路試(European Field Operational Test,EuroFOT)項(xiàng)目[1]和中國大型實(shí)車路試(China Field Operational Test,China-FOT)項(xiàng)目[2]。場景挖掘針對道路測試的駕駛數(shù)據(jù)進(jìn)行分類提取和挖掘,如中國汽車技術(shù)研究中心開展的跟車場景挖掘、BSD 場景挖掘、危險(xiǎn)場景挖掘等項(xiàng)目[3]。場景虛擬重構(gòu)是場景虛擬化、數(shù)據(jù)化技術(shù)成熟的重要標(biāo)志,如李銀國、周中奎利用雙目攝像頭提取道路環(huán)境信息,進(jìn)行智能駕駛場景的虛擬重構(gòu)[4]。目前場景虛擬重構(gòu)的主流軟件有CarSim、Prescan、VTD等,可以通過道路建設(shè)、目標(biāo)物生成、初始條件、運(yùn)動模型導(dǎo)入等步驟在軟件中將所需要的場景生成重構(gòu),極大地提升了智能駕駛研發(fā)和驗(yàn)證的效率。
本文研究的信號燈路口跟停場景的虛擬重構(gòu),以Prescan軟件作為虛擬場景的搭建平臺,生成場景中的車輛、道路以及交通標(biāo)志,針對靜止的目標(biāo)前車和制動的目標(biāo)前車,構(gòu)造跟停模型,設(shè)定本車及目標(biāo)車的初始條件,通過Prescan和Simulink聯(lián)合仿真[5],自動生成虛擬的信號燈路口跟停的場景,為智能駕駛測試場景庫的信號燈路口跟停場景的虛擬重構(gòu)模型搭建提供了技術(shù)支持。
2 跟停場景虛擬生成控制策略
2.1 跟停場景搭建架構(gòu)
信號燈路口車輛跟停場景的搭建架構(gòu)由道路環(huán)境建設(shè)模塊、初始條件設(shè)定模塊和車輛控制模塊3部分組成。其中,道路環(huán)境建設(shè)模塊包括道路、交通標(biāo)志的建設(shè),用于生成場景的道路環(huán)境條件;初始條件的設(shè)定旨在明確對本車位置和目標(biāo)前車的位置、速度、加速度初始條件;車輛控制模塊以車輛狀態(tài)和目標(biāo)參數(shù)為依據(jù),控制車輛運(yùn)動。
2.2 道路環(huán)境建設(shè)模塊
道路環(huán)境建設(shè)模塊主要目的是實(shí)現(xiàn)信號燈路口道路的自動生成。信號燈路口道路的測試用例提供雙向4車道、雙向6車道、雙向8車道的道路模型,可以對測試用例的車道數(shù)量、車道寬、車道線顏色和類型進(jìn)行設(shè)置,如表1所示。

表1 道路設(shè)置
交通信號燈作為信號燈路口的主要交通標(biāo)志物,具有指導(dǎo)機(jī)動車、非機(jī)動車、行人有序的通過信號燈路口的功能,是跟停場景的重要組成部分。測試用例提供多種搭建的場景環(huán)境,其中信號燈可選擇種類包括:機(jī)動車信號燈(橫置式)、機(jī)動車交通信號燈(直立式)、非機(jī)動車信號燈、人行橫道信號燈。
2.3 初始條件設(shè)定模塊
在信號燈路口跟停場景的虛擬重構(gòu)過程中,以本車的初始位置作為場景參考系的原點(diǎn)(0,0),自動設(shè)定本車與目標(biāo)前車位于同一車道內(nèi),因此場景重構(gòu)僅需考慮車輛的縱向運(yùn)動狀態(tài)[6],初始條件設(shè)定模塊對跟停場景中本車位置、速度和目標(biāo)前車的位置、速度、加速度參數(shù)進(jìn)行設(shè)定,如圖1所示,輸出信息為初始時(shí)刻的車輛運(yùn)動狀態(tài)。
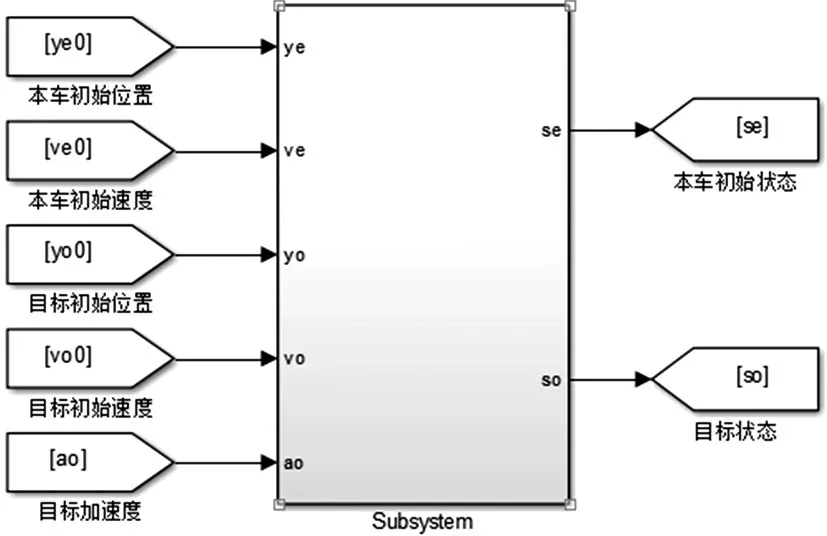
圖1 初始條件設(shè)置模塊
2.4 車輛控制模塊
車輛控制模塊是虛擬場景自動生成的核心部分,它通過跟停模型控制本車跟停的運(yùn)動過程,針對目標(biāo)車的運(yùn)動狀態(tài),將跟停場景分為2組:目標(biāo)車靜止和目標(biāo)車制動減速[7]。在場景的虛擬重構(gòu)過程中,由于各個(gè)測試車輛的結(jié)構(gòu)各異,動力學(xué)模型各不相同,在此本文采用Prescan 默認(rèn)的動力學(xué)模型作為本車的動力學(xué)模型。
2.41 最小制動減速度計(jì)算
一般而言,但凡新成立的部門在選才用人上都很重視專門學(xué)識,前清舊員們大多不具備專門學(xué)識,因此成為被裁汰的主要對象。但對此極力反對者有之,其理由是政府正當(dāng)用人之際,應(yīng)力為挽留才是。如交通部被裁撤人員覺得去留不公平,遂于4月28日在湖廣會館開會,研究對待梁士詒、葉恭綽之方法。同日,南方交通部人員針對此事在金臺旅館開會,研究如何到部履職問題。時(shí)人評論:“兩相映照,頗耐人尋味也。”
當(dāng)前方目標(biāo)車輛處于靜止?fàn)顟B(tài)時(shí),為保障車輛的行駛安全,需要計(jì)算滿足本車最小制動減速度[8],它是避免本車與目標(biāo)車碰撞的本車加速度臨界值,計(jì)算過程如下:
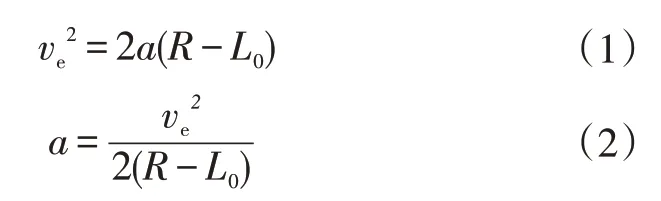
式中,ve為本車初始速度;a為本車的最小制動減速度;R為目標(biāo)與本車的車頭間距;L0為最小安全距離,其值為3 m[9-11]。
當(dāng)前方目標(biāo)車輛處于制動減速狀態(tài)時(shí),需要綜合考慮本車與目標(biāo)車在行駛過程中的安全問題。為保障車輛的行駛安全,需要計(jì)算即時(shí)碰撞時(shí)間(Time To Collision,TTC)、目標(biāo)車的制動時(shí)間、避免本車與前車碰撞最小制動減速度的臨界值[12-16],默認(rèn)目標(biāo)車與本車的相對速度為vr<0,目標(biāo)車的加速度aobj<0,計(jì)算過程如下:

式中,TTC為即時(shí)碰撞時(shí)間;R為目標(biāo)與本車的車頭間距;vo為目標(biāo)車初始速度;ve為本車初始速度;a為本車的最小制動減速度;tobj目標(biāo)車的制動時(shí)間;a0為目標(biāo)車的制動減速度;L0為最小安全距離。
2.42 基于神經(jīng)網(wǎng)絡(luò)的跟停控制模型
最小制動減速度是避免本車與目標(biāo)車碰撞的加速度臨界值,實(shí)際生活中駕駛員跟停往往會有更長的安全距離或更大的制動減速度。為了使虛擬重構(gòu)跟停場景能夠更加真實(shí)的還原實(shí)際情況,利用神經(jīng)網(wǎng)設(shè)計(jì)本車的跟停模型[17-19],提取大量實(shí)際跟停場景的車輛狀態(tài)信息作為輸入、輸出對,構(gòu)造基于神經(jīng)網(wǎng)絡(luò)的跟停模型示意圖,如圖2所示,模型輸入為本車速度、最小制動減速度、相對距離、相對速度等,輸出為下一時(shí)刻的本車加速度。
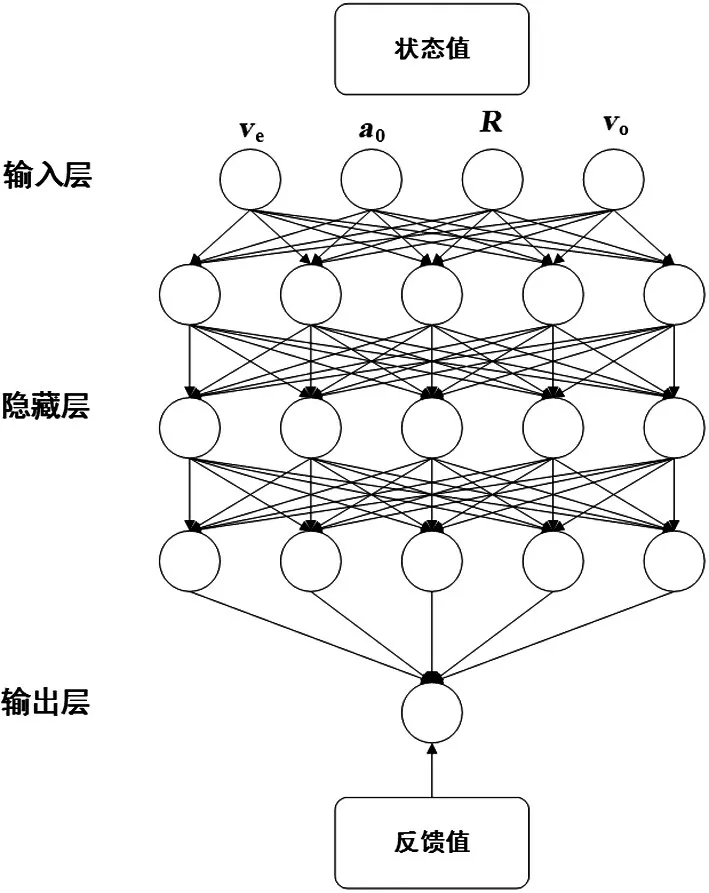
圖2 智能駕駛系統(tǒng)示意
(1)隱含層神經(jīng)元層數(shù)和個(gè)數(shù)選擇:
式中,n1為隱含層神經(jīng)元個(gè)數(shù),n2為輸入神經(jīng)元個(gè)數(shù),m為隱含層單元數(shù)目,a為1~10之間的調(diào)節(jié)常數(shù)。
(2)神經(jīng)網(wǎng)絡(luò)的訓(xùn)練方法選擇
常用的神經(jīng)網(wǎng)絡(luò)訓(xùn)練方法包括:下降法、牛頓算法、共軛梯度法、準(zhǔn)牛頓法和Levenberg-Marquardt(LM)算法。依據(jù)模型參數(shù)以及對數(shù)據(jù)量進(jìn)行對比,結(jié)果表明L-M算法的收斂速度最快,比其它算法的效果快幾倍到幾十倍。L-M算法的參數(shù)更新公式為:

式中,ΔW為參數(shù)更新矩陣,J為Jacobian 的加權(quán)系數(shù)矩陣,I為單位矩陣,u為加權(quán)系數(shù),T為矩陣轉(zhuǎn)置。
(3)數(shù)據(jù)提取及訓(xùn)練結(jié)果
提取目標(biāo)車停止和目標(biāo)車制動試驗(yàn)過程中的車輛狀態(tài)數(shù)據(jù)對神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練。目標(biāo)車停止的試驗(yàn)過程:目標(biāo)車停在道路前方,控制本車在設(shè)定的位置達(dá)到設(shè)定的初始速度,由駕駛員進(jìn)行跟停操作。目標(biāo)車制動的試驗(yàn)過程:目標(biāo)車位于道路前方,以恒定的加速度進(jìn)行制動,由駕駛員控制本車在初始條件下跟隨目標(biāo)車停止。由于駕駛行為的學(xué)習(xí)需要大量數(shù)據(jù),最終在10~40 km/h 的速度區(qū)間(目標(biāo)速度小于本車速度)截取了4 886 組數(shù)據(jù)。選擇本車速度、目標(biāo)速度、相對距離、相對速度作為輸入,選擇本車加速度作為輸出,訓(xùn)練一個(gè)20 層的神經(jīng)網(wǎng)絡(luò),樣本數(shù)據(jù)按70%:15%:15%的比例分為訓(xùn)練樣本、測試樣本、仿真樣本,訓(xùn)練結(jié)果如表2所示。
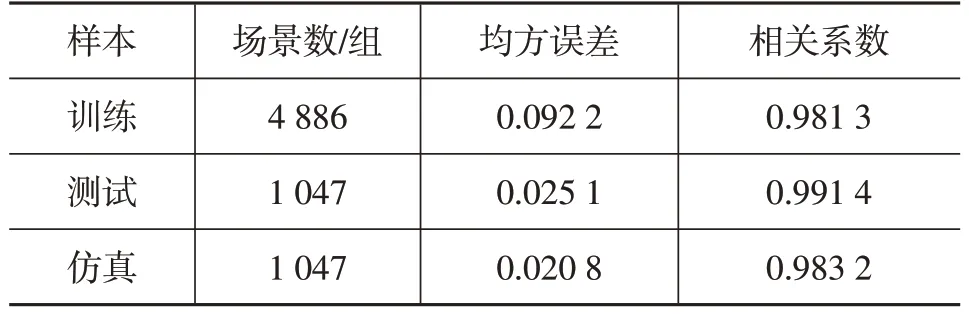
表2 神經(jīng)網(wǎng)絡(luò)的訓(xùn)練結(jié)果
車輛控制模塊利用神經(jīng)網(wǎng)絡(luò)輸出的本車加速度和基于參數(shù)化設(shè)計(jì)的跟停場景控制模型,計(jì)算獲得車輛的運(yùn)動狀態(tài)和行駛軌跡[19]。定義安全信號asafe,車頭間距大于危險(xiǎn)車頭間距(本車以最小制動減速度行駛)的值為1,否則值為0。
跟停控制模型如圖3 所示,以本車狀態(tài)、目標(biāo)狀態(tài)、神經(jīng)網(wǎng)絡(luò)計(jì)算的本車加速度、相對距離、相對速度和最小制動減速度作為輸入,控制輸出本車和目標(biāo)車的行駛軌跡和安全信號。
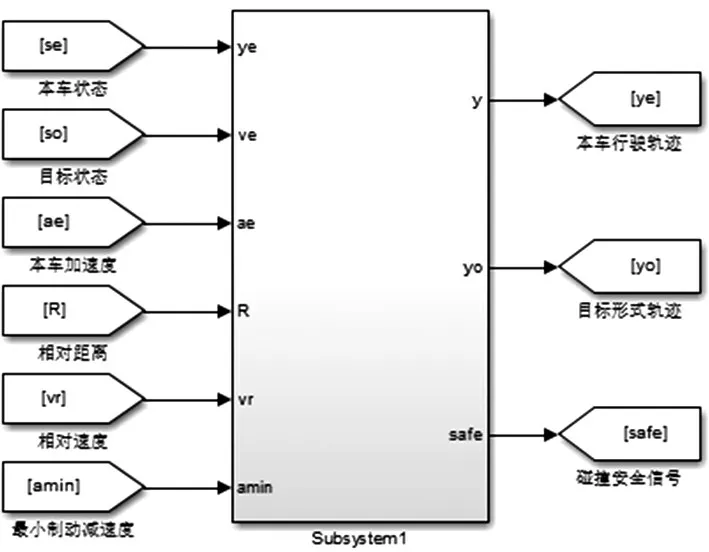
圖3 跟停控制模型
3 跟停場景虛擬重構(gòu)結(jié)果驗(yàn)證
重構(gòu)場景示例1 為目標(biāo)處于靜止?fàn)顟B(tài)的跟停場景,重構(gòu)的道路設(shè)置、本車初始條件設(shè)定及目標(biāo)前車初始條件設(shè)定結(jié)果如表3、表4所示,十字路口信號燈選擇機(jī)動車信號燈(直立式)。

表3 道路設(shè)置

表4 初始條件設(shè)定
在示例1中,目標(biāo)前車處于靜止?fàn)顟B(tài),本車在神經(jīng)網(wǎng)絡(luò)控制下的制動跟停,其速度和加速度曲線如圖4和圖5所示,本車與目標(biāo)車的相對距離變化曲線如圖6所示。

圖4 本車速度曲線
示例1 的Prescan 軟件在環(huán)虛擬重構(gòu)結(jié)果如圖7所示。
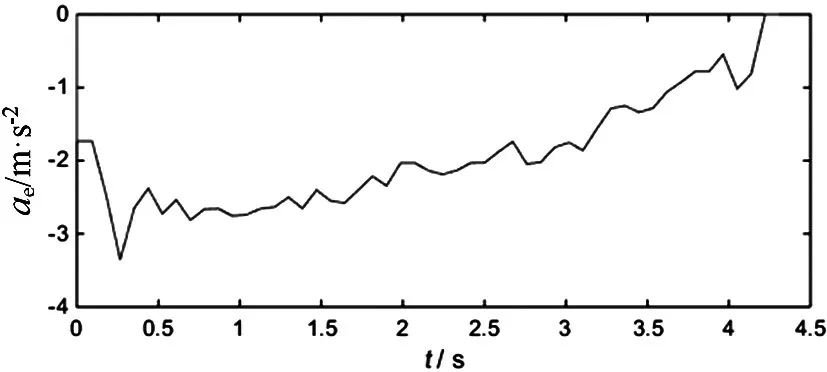
圖5 本車加速度曲線
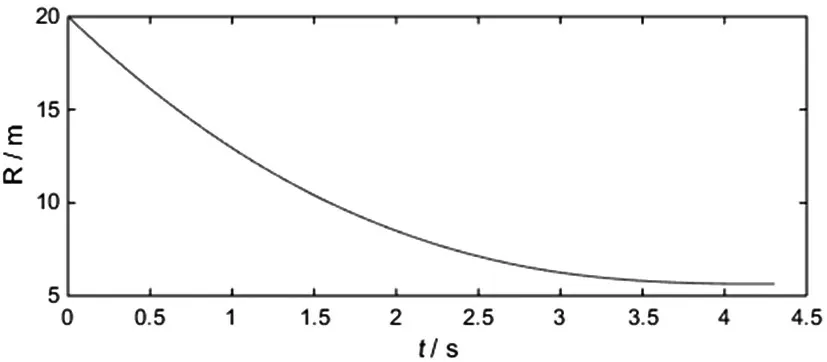
圖6 相對距離變化曲線

圖7 示例1虛擬重構(gòu)結(jié)果
重構(gòu)場景實(shí)例2為目標(biāo)處于制動減速狀態(tài)的跟停場景,重構(gòu)的道路設(shè)置、本車初始條件設(shè)定、目標(biāo)前車初始條件設(shè)定結(jié)果如表5、表6所示,十字路口信號燈選擇機(jī)動車信號燈(橫置式)。
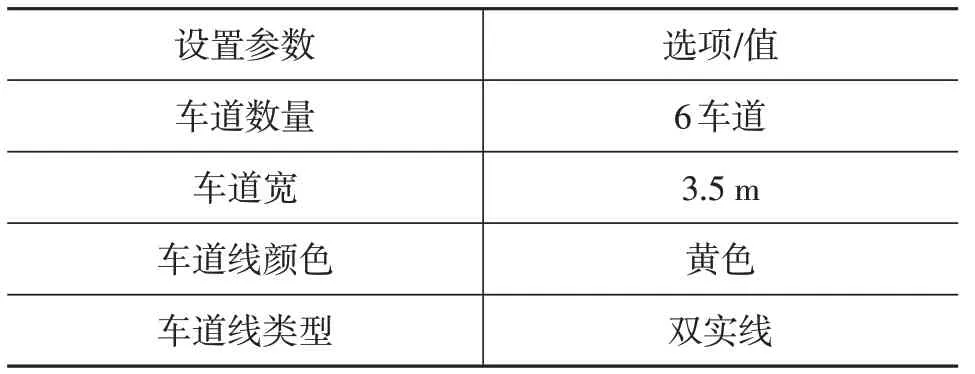
表5 道路設(shè)置
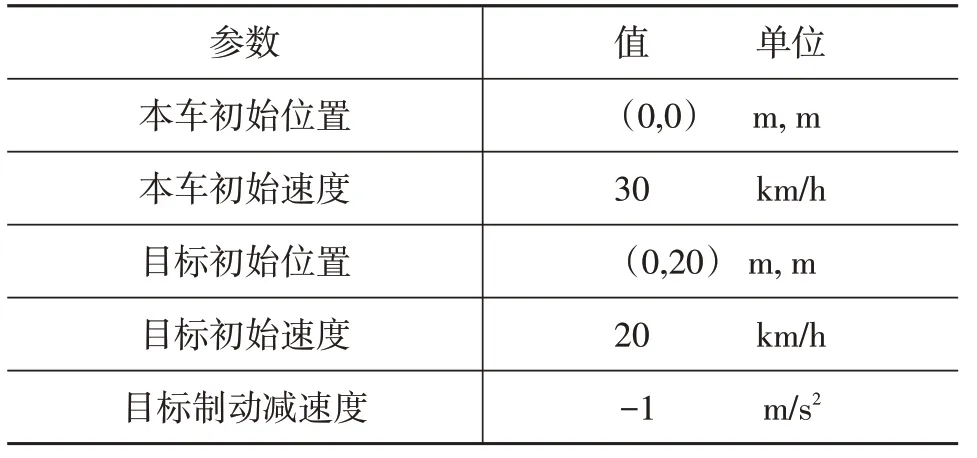
表6 初始條件設(shè)定
在示例2中,目標(biāo)前車做勻減速運(yùn)動,其速度曲線圖如圖8所示,本車在神經(jīng)網(wǎng)絡(luò)控制下跟隨前車制動跟停,其速度和加速度曲線如圖9、圖10所示,本車與目標(biāo)車的相對距離變化曲線如圖11所示。
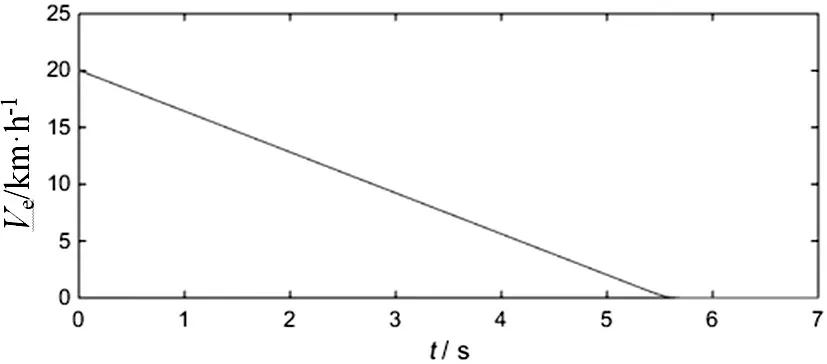
圖8 目標(biāo)速度曲線
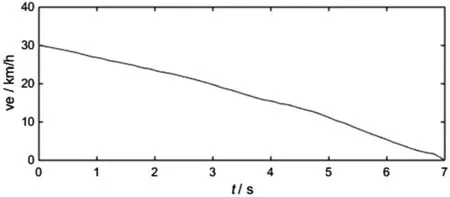
圖9 本車速度曲線
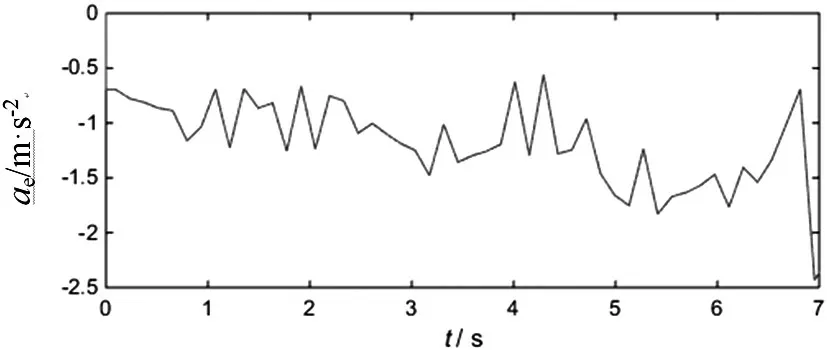
圖10 本車加速度曲線
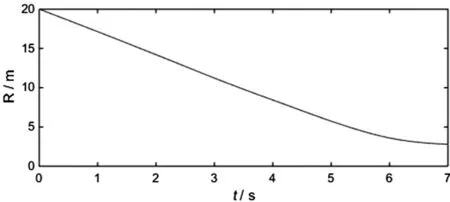
圖11 相對距離變化曲線
示例2 的Prescan 軟件在環(huán)虛擬重構(gòu)結(jié)果如圖12所示。

圖12 示例2場景重構(gòu)結(jié)果
4 結(jié)論
本文提出了一種基于Prescan 的信號燈路口跟停場景虛擬重構(gòu)方法,該方法通過道路環(huán)境建設(shè)模塊、初始條件設(shè)定模塊和車輛控制模塊,對目標(biāo)車輛靜止和目標(biāo)車輛制動減速的2 類信號燈路口跟停場景進(jìn)行道路環(huán)境和車輛行駛路徑的虛擬重構(gòu)。未來將圍繞包括行人、自行車、摩托車等非機(jī)動車目標(biāo)的跟停場景。