大型火炬臂浮吊與履帶吊合抬吊裝技術
2021-04-06 06:09:40李雪松李彤濱劉超李記忠孟維超
化工管理 2021年9期
李雪松,李彤濱,劉超,李記忠,孟維超
(海洋石油工程股份有限公司,天津 300461)
0 引言
火炬臂是海洋石油生產平臺的重要組成部分,通常是由鋼制圓管組成的細長型結構,其作用是將石油開采過程中油氣分離出來和生產使用剩余的伴生天然氣引至安全的位置,進行燃燒或放空。在浮式生產平臺中,隨著平臺的大型化和上部模塊油氣處理工藝的變化,火炬臂的尺寸和重量也在逐步增加。在建造過程中,需將其在碼頭由平躺狀態翻身到在位角度后,再吊裝至FPSO甲板設計位置,該過程對浮吊能力和吊裝方案設計形成了挑戰。
1 火炬臂信息
文章以流花16-2油田群“海洋石油119”FPSO(浮式生產儲卸油裝置)的火炬臂吊裝為例,對大型火炬臂的浮吊與履帶吊合抬吊裝技術進行闡述。該火炬臂長86.7 m,高110 m,重量達到436 t,在建造過程中,呈平躺狀態。安裝時,需要將其翻身至60°,再吊裝到位于FPSO艏部甲板EL+34.45 m的支座上[1]。本次吊裝過程分兩部分進行:(1)首先由浮吊和履帶吊合抬,將火炬臂平吊離地面一定距離后,對火炬臂進行翻身,翻身完成后,履帶吊摘鉤;(2)浮吊移船至FPSO艏部,將火炬臂下放就位,火炬臂焊接達到要求后,摘除索具,吊裝作業完成。火炬臂在FPSO布置圖如圖1所示。

圖1 火炬臂信息
2 火炬臂合抬翻身方案
2.1 吊裝準備
(1)精度測量。火炬臂建造過程中,施工人員應全過程對火炬臂主腿間距和水平度進行測量,使其精度與位于FPSO的支座相匹配,如發現建造精度超出要求值,應及時使用工裝進行調整。火炬臂建造完工后,根據測量尺寸,切除火炬臂支座頂部的預留段,并打磨好坡口。
(2)摘扣通道搭設。在火炬臂吊裝前,應在火炬臂上搭設好用于吊裝就位后摘除索具的腳手架通道。需注意的是,翻身過程中索具與火炬臂的相對位置一直在發生變化,腳手架不能與吊裝索具發生干涉。
(3)吊裝干涉檢查。吊裝前,對FPSO甲板火炬臂就位區域進行檢查,支座周圍1.5 m內不應有其他結構物,需對可能影響吊裝的擋浪墻、火炬臂爬梯等結構提前拆除。火炬臂翻身過程中,履帶吊需根據翻身的進程移動位置和旋轉扒桿,需對建造場地進行檢查,確保有足夠的空間供履帶吊使用。
(3)FPSO調平。FPSO進行調載,使其在火炬臂吊裝時,甲板處于水平的狀態。如果火炬臂吊裝時,FPSO調載系統沒有完成調試,還不能使用,需要通過調載艙在甲板位置的人孔,安裝臨時調載泵,對FPSO調平。
2.2 吊裝索具布置
火炬臂外側由上至下設置3組耳軸式吊點,上方兩組吊點供浮吊使用,下方一組吊點供履帶吊使用。為滿足浮吊鉤頭豎直受力的要求,浮吊與火炬臂之間通過撐桿進行連接。設計吊裝方案時,因火炬臂翻身過程中,3組吊點的水平間距一直在發生變化,所以設計為平吊和翻身時,只有最上方和最下方的兩組吊點受力,中間吊點不受力,其索具處于松弛狀態。當吊點間距變化時,通過履帶吊的移動,使浮吊與履帶吊鉤頭間距與吊點間距同步變化。當火炬臂翻身到設計角度時,浮吊索具恰好全部處于伸直狀態。吊裝前對吊裝過程進行模擬,避免浮吊、撐桿與履帶吊發生碰撞。索具布置圖如圖2所示。

圖2 索具布置
2.3 火炬臂翻身步驟
(1)火炬臂平吊。因火炬臂吊裝就位后,需繼續保持受力狀態直至火炬臂主腿完成焊接,整個吊裝過程通常需要約36 h。在決定吊裝前,需確認有足夠長的天氣窗口。港池內浮吊吊裝作業,一般要求未來72 h內風速小于10 m/s,浪高小于0.5 m。浮吊與履帶吊分別在火炬臂兩側就位,連接鉤頭與火炬臂之間索具,使用麻繩等對耳軸處索具綁扎,避免吊裝過程中索具脫出。在平吊和翻身過程中索具2處于松弛狀態,使用浮吊的索具鉤將其拉開,使其遠離火炬臂,防止與火炬臂發生剮蹭,破壞油漆[2]。火炬臂與建造底座的綁扎固定切除后,浮吊與履帶吊同步提升鉤頭,將火炬臂緩慢吊起離開地面0.5 m,并保持此狀態1 min,確定沒有問題后,繼續提升火炬臂約10 m。保持此過程中火炬臂處于水平狀態。平吊時履帶吊受力230 t,浮吊兩個鉤頭分別受力87 t和286 t。
(2)火炬臂翻身。火炬臂平吊離開地面穩定后,開始翻身扶正。此時浮吊位置不動,緩慢提升鉤頭。履帶吊鉤頭高度不變,隨浮吊鉤頭提升,同步緩慢旋轉扒桿并變幅,使火炬臂在朝向不發生改變的情況下緩慢增加與地面的夾角,直至與地面夾角60°。翻身過程中,浮吊指揮人員應與履帶吊指揮人員保持實時溝通,確保兩臺吊機的動作同步可控。翻身過程中,履帶吊受力逐步降低到165 t,浮吊受力逐步增加到89 t和348 t。
(3)重量轉移,履帶吊摘鉤。火炬臂與地面夾角達到60°后,索具2即達到伸直狀態,但還沒有承受火炬臂的重量。此時浮吊與履帶吊扒桿均保持靜止,履帶吊鉤頭緩慢卸力,履帶吊的吊裝力緩慢轉移到浮吊。隨著履帶吊卸力,索具2開始逐漸承受火炬臂的重量。在履帶吊完成卸力,即索具3松弛后,重量轉移完成,將索具3從火炬臂摘除。浮吊與履帶吊的合抬翻身過程結束,此時浮吊兩個鉤頭分別受力276 t和326 t。火炬臂翻身過程如圖3所示。

圖3 火炬臂翻身
2.4 火炬臂就位
火炬臂完成翻身后,浮吊繼續提升主鉤高度,使火炬臂底部高度超過FPSO甲板的支座。隨后,浮吊通過提前在港池鋪設好的錨系,由碼頭移船至FPSO船艏位置,將火炬臂下放至支座上,此時需繼續保留一部分吊裝力,使火炬臂保持穩定。待火炬臂與支座間的焊接完成后,從火炬臂摘除吊裝索具,火炬臂吊裝完成[3]。火炬臂就位照片如圖4所示。

圖4 火炬臂就位
3 計算分析
在SACS軟件中建立火炬臂的有限元模型,對火炬臂吊裝全過程進行計算分析。根據火炬臂翻身步驟,分為6個工況,對火炬臂強度進行計算:(1)火炬臂處于平吊狀態,索具1、索具3受力;(2)火炬臂翻轉15°,索具1、索具3受力;(3)火炬臂翻轉30°,索具1、索具3受力;(4)火炬臂翻轉45°,索具1、索具3受力;(5)火炬臂翻轉60°,索具1、索具3受力;(6)火炬臂重量轉移完成,索具1、索具2受力;火炬臂的SACS模型如圖5所示。
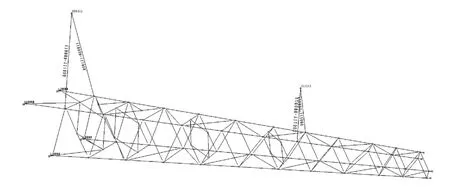
圖5 火炬臂SACS模型
除對火炬臂強度進行校核外,還需要對吊機和索具能力進行校核。根據上述6個工況計算出的吊繩力,對每根索具的安全系數進行校核。并通過吊繩力計算出吊裝過程中,浮吊與履帶吊受到的最大鉤頭力,對浮吊與履帶吊的吊重能力進行校核。
4 結語
火炬臂相較于其他結構物,受建造和就位角度不同的影響,在吊裝時需首先進行翻身扶正。使用單扒桿雙鉤頭浮吊,在其鉤頭允許側向受力時,可僅靠自身吊機完成火炬臂翻身動作。但在使用雙扒桿浮吊時,鉤頭不允許側向受力,僅靠浮吊不能完成火炬臂翻身,面對這種情況,文章以浮吊與履帶吊合抬作為解決方案,對吊裝過程進行詳細的說明和闡述。通過合抬吊裝技術,增加了浮吊船的適用范圍,降低了對吊機能力的限制,能夠有效降低吊裝成本。