煤礦排水設備智能控制系統分析
2021-04-08 12:25:48喬哲偉
機械管理開發 2021年1期
喬哲偉
(南京北路自動化系統有限責任公司, 江蘇 南京 211199)
引言
目前,在礦井排水系統各個泵房大概安裝6 套排水泵,其主要是通過控制系統進行集中控制。假如水位超過系統的既定高度時,水泵會同一時間打開排水。據統計排水系統消耗的電能力占礦山總用電量的15%以上。傳統控制系統僅具有簡單的開關控制功能,不僅無法適應地下突水事故[1]以及無法指向性地對排水時間進行調整,而且無法滿足綜采對地下排水靈活性、經濟性以及可靠性的要求,因此,提出了一種新型的采礦井內智能排水控制系統。
1 煤礦智能排水設備控制系統結構
結合地下煤礦排水系統的布置,提出了基于分布式控制理論的地下煤礦排水設備智能控制系統,并采取了容錯結構的設計。各個排水控制模塊都可以運行獨立,單獨維護。已經損壞的模塊無法對別的模塊運行造成影響[2]。控制模塊的操作大大提高了控制系統的安全性。由監控中心、數據傳輸、煤礦井下排水控制單元和交換系統共同組成了排水設備控制系統。如下圖1 所示。
圖1 中排水控制系統利用CAN 雙絞線屏蔽了網絡線路。以網絡的形式連接各個排水裝置。煤礦井下的水泵房由監控單元來實現實時監控。由調度單元負責對水泵單元的運行模式進行全面控制。該系統控制單元可以直接用于接收監控中心的控制命令,并且用多種方式完成對地下水泵的運行控制[3]。如果出現系統無法跟地面監控中心通信的情況,各個監控中心就會更換至自主控制運行的模式,以既定的控制邏輯來完成自主排水的運行控制。
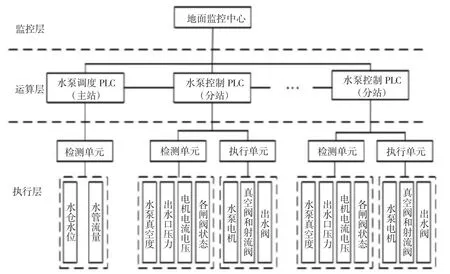
圖1 礦井排水設備智能控制系統結構示意圖
雙模式排水控制模式是系統利用的主要模式。如果水位超出了預設值或者水位變化速度超出了預定值的時候,就會激活控制系統從而進行排水作業,并且滿足任何條件的排水安全需求。與此同時結合水位和實際時段決定是否同時啟動排水和抽水機的個數,保障經濟排水。
2 煤礦智能排水設備智能控制系統避峰降谷控制策略
利用傳統避峰降谷方式,主要將停滯地區的水位分為不一樣的預警水位。當功耗較低時,如果水位超過設置的警告水位,則系統將被激活。在此期間,請盡量不要啟動排水泵,并使用簡單的控制來避免峰值和降低谷值。然而,這種類型的控制方案不能在低功耗期間將停滯區域的水長時間保持在最低水位,因此無法使用。在高峰時段用電釋放了更多的存儲容量,不僅增加了高峰用電期間水泵啟動的次數而且功耗較大。所以此文提出使用的礦井排水設備智能控制系統采用一種避免峰谷的改進控制機制,即當功耗較低時,將同時打開多個排水泵,以將水位保持在最低控制警告線,即最低功耗。在此期間積累的水會釋放出盡可能多的存儲容量,從而減少用電高峰期的排放[4]。通過對排水的控制,系統將結合水位下降的速度確定同一時間打開的水泵數量可以交替操作,以增加排水泵的使用壽命,并且確保經濟排水。假如某一個蓄水區的排水警告水位為3.4 m,最低控制水位為1.5 m,則控制系統發揮作用的水位變化和啟動控制策略,如圖2 所示。
圖2 表明,在這類控制系統的作用下,在低能耗時段(00:00—08:00)并且在排水系統里面啟動的水泵數量逐漸減少的情況下,水位可以控制在08:00之前的最低水位之下。在此期間,釋放了很多存儲容量可以很好的降低白天工作的水泵長度以及個數,還能提升排水的經濟效力[5]。根據統計表明此系統的應用可以讓污水處理成本從1.78 元/m3降至1.12元/m3。
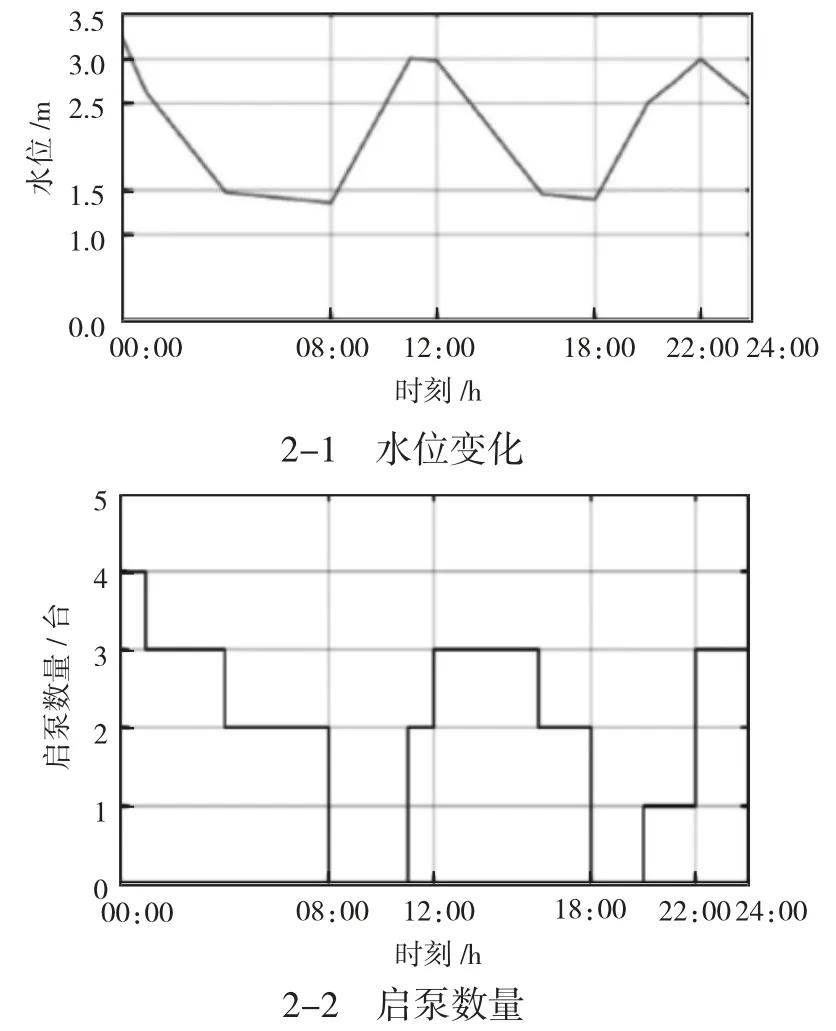
圖2 積水區域水位變化和排水泵啟動控制曲線
3 煤礦智能排水設備智能控制系統水倉水位傳感器的監測原理
礦井排水的控制系統精度決定性在于液位傳感器水倉水位監控的準確性導致了超聲波液位傳感器的出現。而傳感器通常設置在停滯區域的頂板上,通過計算發送以及接收,利用超聲波時差實時監控水位[6]。如圖3 所示[7],h1代表超聲傳感器的變送器頭和水面之間的距離,而h2則代表超聲傳感器的變送器頭和水底之間的距離,則聲波的傳輸速度v 發送和接收的時間t 與h1的關系為h1=vt/2,同時水位是h=h1-h2。
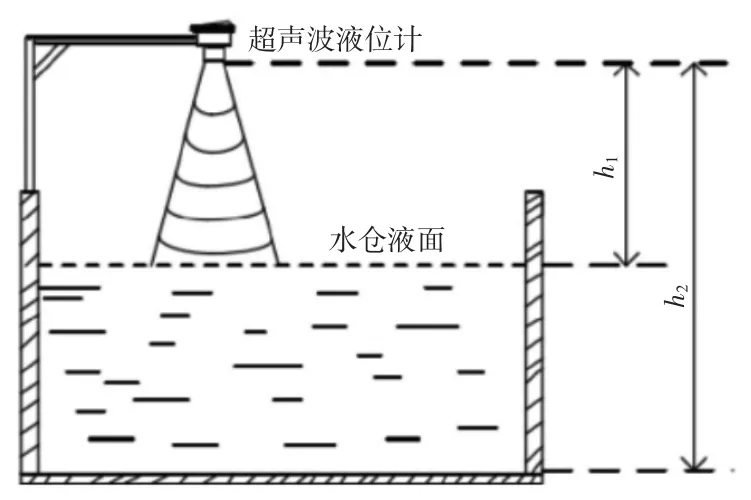
圖3 超聲波傳感器測量原理
4 結語
本文所研究的礦井排水設備智能控制系統的控制模式是雙模式排水控制,即假如水位超出預設值或者水位變化速度超出預定值的時候,能夠開啟控制系統從而執行排水操作。與此同時排水控制通過水位和位置可以確定能不能啟動排水,從而在規定的期限內確定啟動泵的個數,以確保排水經濟適用性。應用該系統可將排水成本從1.78 元/m3降至1.12 元 /m3。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年4期)2016-05-04 04:00:23
工業設計(2016年12期)2016-04-16 02:52:00
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50