無信號交叉口車輛調度方法研究
2021-04-12 09:50:48侯運鋒龔朝暉
小型微型計算機系統 2021年4期
侯運鋒,龔朝暉
(上海理工大學 光電信息與計算機工程學院,上海 200093)
1 引 言
對交通系統的建模和控制是避免交通擁堵和減少交通事故的關鍵.在車路協同環境下,智能交通系統,特別交叉口的車輛通行控制方法已經成為各國的研究重點.經過多年的發展,產生了諸如美國的智能駕駛,歐盟的智能交通系統(Intelligent Transportation Systems,ITS).智能交通系統基于先進的傳感器和信息通信等技術,實現車輛與車輛、車輛與道路之間的信息交互,保證車輛在復雜的交通環境下的行駛安全,對道路交通實施主動控制.
Pandit等[1]基于車路信息交互提出了交叉口車輛的在線調度算法(Oldest Job First,OJF).該算法利用圖論對路口的交通動作進行建模.交叉口車輛所有的交通動作表示為圖的一個頂點.若兩個動作發生沖突,則在其對應頂點之間連接一條直線.互相發生沖突的車輛不能同時調度.由于OJF每次只處理最先到達交叉口的車輛,所以信號燈的切換過于頻繁,難以在實際中應用.為了提高交通運輸效率,趙文天等[2]提出(Frame-based Traffic Scheduling,FTS)算法,該算法采取和OJB相同的車輛調度模式,不同的是FTS將一個時間段內路口的車輛積攢到一起處理,有效地減少了相位的切換次數和車輛的等待時間.Kamal等人[3]基于車路協同技術,根據當前時刻各個路段上的車輛行駛狀態在線優化信號燈相位的時間配比,并提前一個周期廣播給路段上所有車輛,車輛根據廣播調整自身速度,以最短停車時間通過路口.另外,隨著人工智能技術的發展,基于智能算法的信號配時優化技術也得到了長足發展[4,5].
傳統信號燈控制方式[1-5]同一時刻只允許互不沖突相位上的車輛通過.為確保安全,每個相位最后幾秒通常設置為黃燈時間.在黃燈時間路段上的所有車輛都不被允許駛入交叉口.相位之間的頻繁切換會導致信號周期單位時間內黃燈時間占比增加,從而降低交叉口的通行能力.
上官偉等[6]在車路協同環境下,設計了基于時延Petri網(Petri Net,PN)的無信號交叉口控制方法.該方法依據時延PN模型,將交叉口當作車輛行駛的共享區域,以最小化交叉口車輛消散時間為優化目標,由路側單元的中央控制器給不同路段上的車輛分配路權.該算法認為交叉口為一個單獨的路權,為了保證行駛安全,所有與當前正在通過交叉口的車輛行駛軌跡發生沖突的車輛都不被允許駛入交叉口.這在一定程度上浪費了有限交叉口物理空間資源.
Febbraro 等[7-10]將交叉路口細分為不同的空間區域.每個空間區域最多容納一輛車輛.每一個空間區域采用一個PN單元來建模.空間區域的最大車容量為描述該空間區域庫所的令牌數量.Wang等[11]提出了一種雙模塊交叉口PN表示方法,其中第一個模塊將交叉口細分為不同的空間區域,然后對其進行建模.每個空間區域同樣最多只能容納一輛車輛.第二個模塊對交叉口的交通信號系統進行建模.然后,將兩個模塊耦合在一起實現對交叉口車輛通行的控制.在該模型中,作者認為從西到北的左轉車輛和從東到南的左轉車輛屬于同一相位的不同階段,需要分別執行.然而,現實中相向行駛的左轉車輛可以共享同一空間區域而不發生碰撞.顯然,基于劃分空間的車輛控制方法中[7-11]每個空間區域最多只能容納一輛車輛的設定影響了交叉口的車輛吞吐能力.
針對上述問題本文在車路協同模式下提出了一種無信號交叉口微觀建模方法.該方法將交叉口劃分為不同的空間區域,并把不同的區域設為不同的路權資源,智能車輛通過不同的空間區域需要向路側單元申請相應的路權使用權,路側單元根據車輛行駛信息實時控制車輛的通行.不同于之前的工作[7-11],本文認為每個路權的最大容量要根據車輛的行駛方向實時確定.例如,同一相位上的兩輛相向而行的左轉車輛的行駛軌跡不會發生沖突可以同時占用一個路權.然而,不同相位上的一輛左轉車輛和一輛直行車輛的行駛軌跡會發生沖突,為保證安全,這兩輛車不能共享同一個路權.路權資源要根據到達該資源車輛的行駛方向來確定其最大車容量.在此基礎上,構建無信號交叉口資源調度模型,以最大化交叉口的通行效率為目標,在線計算無交叉口車輛調度方案.所設計方案在保證車輛通行安全性的同時充分考慮了路權資源最大容量的動態變化特性,力求達到“見縫插針”的效果.與此同時,基于無信號交叉口物理空間的車輛調度方式不存在由于相位切換而導致的黃燈時間占比增加的問題,進一步提升了交叉口車輛吞吐能力.
2 研究對象
2.1 交叉路口
本文選用如圖1所示雙向兩車道交叉口作為研究對象,所闡述方法同樣適用于雙向四車道交叉口和T型交叉口.圖1所示交叉口一共有8條路段,分別為路段1~8.模型構建的基本思想是將交叉口物理空間劃分為互不相交的路權.如圖1所示,交叉口被劃分為5個互不相交的路權a、b、c、d、e.車輛通過交叉口的過程中不可避免地要占用某些路權.例如,從路段1直行駛向路段5的車輛需要依次占用路權a、d.從路段3左轉進入路段5的車輛需要依次占用路權b、e、d.從路段2右轉進入路段8的車輛要占用路權c.不同的車輛在通過交叉口的過程中可能會占用相同的路權,例如,從路段1直行駛向路段5與從路段4直行駛向路段8都需要占用路權d.為了保證車輛行駛的安全,需要定義每個路權的最大車容量.
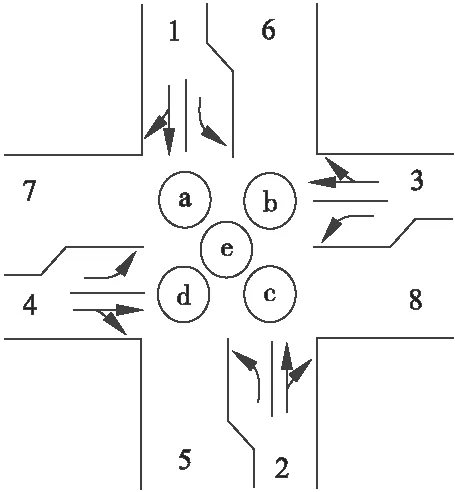
圖1 本文所討論交叉口結構圖Fig.1 Intersection discussed in this paper
本文認為各個路權的最大車容量是動態變化,每個路權的最大車容量要根據駛入車輛的行駛方向動態確定.交叉口相向行駛的左轉車輛不會發生碰撞,因而,從路段1左轉駛向路段8的車輛和從路段2左轉駛向路段7的車輛可以同時共享路權a、e、c.這時候,路權a、e、c的車容量可設為2.同理,從路段3左轉駛向路段5的車輛和從路段4左轉駛向路段6的車輛可以同時共享路權b、e、d.此時路權b、e、d的車容量為2.其他情況下,路權a、b、c、d、e同一時刻最多容納1輛車輛.例如,若路權a被一輛由路段1或者路權b駛入的直行車輛占用,那么此時其他任何車輛不被允許駛入路權a,路權a的最大車容量為1.
2.2 控制模式
目前智能無信號交通控制方式主要分為中央控制站控制模式和車車協同控制模式,本文采用中央控制站控制模式,中央控制站控制模式中車輛主要和路側智能設備進行通信,避免了不同車輛之間的大量信息交互,從而在一定程度上降低了系統對無線通信網絡的要求.
本文所考慮的無信號交叉口控制系統主要由3部分組成:
1)自治車輛:當具有智能車載系統的車輛進入路口感應區域時,車輛能夠將自身狀態信息實時發送給智能路側系統,并且能夠實時接收智能路側系統的指令信息.
2)智能路側單元:作為交叉口的“大腦”,與交叉口區域內的自治車輛進行信息交互,獲取車輛的實時狀態信息;路側單元基于所構建模型,利用優化算法,得到最優車輛通行序列,實時向車輛分配交叉口各個區域的使用權,引導車輛通過交叉口.
3)協同信息交互系統:自治車輛和智能路側系統的信息傳輸載體.
3 交叉口模型
3.1 有限自動機
智能交通系統具有高度并發性、資源共享性以及動態性,而在描述系統異步性和并發性方面,有限自動機具有顯著的優勢.本文利用有限自動機構建無信號交叉口路權調度模型.所構建模型考慮了路權最大容量的動態變化特性,充分地利用了有限的交叉口物理空間.
有限自動機(Finite States Automaton,FSA)可以表示為一個5元組G=(X,E,f,Γ,x0),其中,X是有限狀態集合;E是有限事件集合;f:X×E→X是狀態激活函數;Γ是活躍事件函數,任給x∈X,Γ(x)={σ∈E:f(x,σ)!},其中,f(x,σ)!表示f(x,σ)有定義;x0是初始激活狀態.E*表示由E中元素組成的事件發生序列集合.根據事件是否可控,E被分割為可控事件集合Ec和不可控事件集合Euc,即E=Ec∪Euc.f的定義閾按以下方式從E擴展至E*:對于空事件發生序列ε,f(x,ε)=x;任給事件發生序列s∈E*和事件σ∈E,f(x0,sσ)=f(f(x0,s),σ).
事件的發生必須滿足某些限制條件.將事件發生條件函數引入到FSA模型中,往往可以為系統的模擬和分析提供便利.本文對FSA模型做進一步拓展,定義了普遍意義下的FSA(Generalized Finite States Automaton,GFSA)模型.GFSA可以描述為6元組G=(X,E,f,Γ,x0,c),其中,(X,E,f,Γ,x0)是一個普通FSA模型,c:E→{0,1}是事件發生條件函數.給定x∈X和σ∈E,其中,f(x,σ)!若當前時刻狀態x處于激活狀態,并且事件σ滿足發生條件,即c(σ)=1,那么,事件σ允許發生,否則,不被允許發生.
3.2 模型構建
為了更好地表述模型的構建過程,對模型中所使用符號做如下解釋:數字1-8表示路段1~8;字母a、b、c、d、e分別表示路權a、b、c、d、e;字母s、r、l分別表示直行、右轉、左轉車輛.事件σxzk,其中,x,z=1,…,8,a,…,e,k=l,s,r,表示一輛k類型車輛由x駛入z,比如,事件σ1as表示一輛直行車輛由路段1駛入路權a;事件σael表示一輛左轉車輛由路權a駛入路權e;事件αxk,其中,x=1,…,4,k=l,s,r,表示一輛k類型車輛由路段x到達交叉口,比如,事件α1s表示一輛直行車輛由路段1到達交叉路口.
本文構建交叉口模型的過程分為4步:1)構建各個路權的FSA模型;2)構建交叉口各個方向上的車輛到達FSA模型;3)交叉口FSA模型由各個路權FSA模型和交叉口各個方向上的車輛到達FSA模型并行產生;4)定義交叉口FSA模型的事件發生條件函數,構建交叉路口的GFSA模型.
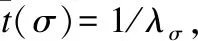
3.2.1 所有路權的FSA模型
路權a~e的FSA模型分別如圖2(a)-圖2(e)所示,分別記做G1~G5.G1中所有狀態的具體定義如下:狀態0表示路權a空置;狀態1表示路權a被一輛由路段1駛入的左轉車輛占用;狀態2表示路權a被一輛由路權e駛入的左轉車輛;狀態3表示路權a被一輛由路段1駛入的左轉車輛和一輛路權e駛入的左轉車輛同時占用;狀態4表示路權a被一輛由路段1駛入的直行車輛占用;狀態5表示路權a被一輛由路段1駛入的右轉車輛占用;狀態6表示路權a被一輛由路權b駛入的直行車輛占用.
由圖2(a)可知,模型G1的初始激活狀態為0,路權a空置.若此時一輛左轉車輛從路段1駛入a,伴隨事件σ1al的發生,系統激活狀態1,此時允許一輛左轉車輛從e駛入a,除此之外,其他占用路權a的行為都會導致車輛相撞而被嚴格禁止.假設此時一輛左轉車輛從e駛向a,伴隨著事件σeal的發生,系統激活狀態3.此時路權a被兩輛左轉車輛同時占用,其他車輛不被允許駛入路權a.接下來,如果一輛車輛離開a進入e,伴隨著事件σacl的發生,路權a中只剩下一輛由路權e駛入的左轉車輛,系統激活狀態2.接下來若由路權e駛入路權a的車輛離開a進入路段7,便隨著事件σa7l發生,系統激活初始狀態0,路權a空置.當系統狀態3處于激活狀態時,若路權a中一輛車輛離開a進入路段7,便隨著事件σa7l的發生,a中只剩一輛由路段1駛入的左轉車輛,系統激活狀態1.此時若這輛左轉車輛離開a前往e,路權a空置,系統激活初始狀態0.
圖2 路權a、b、c、d、e的FSA模型Fig.2 FSA models for section a、b、c、d、e
另一方面,在初始狀態0,事件σ1as、σ1ar、σbas發生后,系統分別激活狀態4、5、6.除非接下來這些車輛離開a進入接下來的路權或路段,其他任何車輛不被允許駛入a.由于路權b、c、d的FSA模型和G1具有較強的可類比性,為了更加簡潔,不再分析G2~G4的狀態演化過程.
G5中所有狀態的具體定義如下:狀態0表示路權e空置;狀態1表示路權e被一輛由路權a駛入的左轉車輛占用;狀態2表示路權e被一輛由路權c駛入的左轉車輛占用;狀態3表示路權e被一輛由路權a駛入左轉車輛和一輛由路權c駛入的左轉車輛同時占用;狀態4表示路權e被一輛由路權b駛入的左轉車輛占用;狀態5表示路權e被一輛由路權b駛入左轉車輛和一輛由路權d駛入的左轉車輛同時占用;狀態6表示路權e被一輛由路權d駛入的左轉車輛占用.
區域e可以同時容納一輛從路權a和路權c,或者路權b和路權d駛入的車輛.但是,當一輛來自路權a或者路權c的車輛駛入區域e時,路權b和路權d的車輛被嚴格禁止駛入路權e(如圖2(e)所示,σbel和σdel在狀態1、2、3沒有定義).同理,當一輛來自路權b或者路權d的車輛駛入路權e時,路權a和路權d的車輛被嚴格禁止駛入路權e(σael和σcel在狀態4、5、6沒有定義).
3.2.2 交叉口各個方向上的車輛到達FSA模型
圖3(a)-圖3(d)模擬了路段1~4上的車輛到達交叉口的過程.圖3(a)-圖3(d)所示模型分別記做G6~G9.

圖3 交叉口各個方向上的車輛到達FSA模型Fig.3 Vehicle arrival models for the intersection
以圖3(a)為例,若路段1上一輛直行車輛到達交叉口,便隨著事件α1s的發生,系統狀態2激活.由圖1可知,此時路段1上的右轉、直行車輛只能排在這輛直行車輛之后,等到這輛直行車輛駛入區域a,即事件σ1as發生后,才能繼續到達交叉口.然而此時路段1上的左轉車輛可以不受直行車輛的影響駛入左轉車道,因此事件α1l在狀態2有定義.當一輛左轉車輛到達交叉口后,便隨著事件α1l的發生,系統狀態5激活.在左轉車輛駛入區域a之前,即事件σ1al發生之前,路段1上的其他左轉車輛不能到達交叉口.
同理,當初始狀態0處于激活狀態時若一輛右轉車輛到達交叉口,伴隨著事件α1r的發生,系統狀態1激活.此時可能存在一輛左轉車輛到達交叉口.若一輛左轉車輛到達交叉口,伴隨著事件α1l的發生,系統狀態4激活.
另外,當初始狀態0處于激活狀態時若一輛左轉車輛到達交叉口,伴隨著事件α1l的發生,系統狀態3激活.此時可能存在一輛右轉或者直行車輛到達交叉口.若一輛右轉車輛到達交叉口,伴隨著事件α1r的發生,系統狀態4激活.若一輛直行車輛到達交叉口,伴隨著事件α1s的發生,系統狀態5激活.
G6中所有狀態的具體定義如下:狀態0表示路段1上沒有車輛到達交叉口;狀態1表示路段1上一輛右轉車輛到達交叉口;狀態2表示路段1上一輛直行車輛到達交叉口;狀態3表示路段1上一輛左轉車輛到達交叉口;狀態4表示路段1上一輛左轉車輛和一輛右轉車輛到達交叉口;狀態5表示路段1上一輛左轉車輛和一輛直行車輛到達交叉口.由于G7~G9和G6具有較強的可類比性,為了更加簡潔,不再分析G7~G9的狀態動態演化過程.
3.2.3 交叉口FSA模型
各個FSA之間既相互獨立又互相影響,它們通過互相之間的共同事件相互作用.例如,σael是G1和G5共同定義的事件,若此時G1和G5的激活狀態分別為1和0,σael發生后G1和G6的激活狀態變為0和1.同理,σ1al是G1和G6共同定義的事件,若此時G1和G6的激活狀態分別為0和3,σ1al發生后G1和G6的激活狀態變為1和0.另外,α1s只在G6中有定義,若此時G6的激活狀態是0,α1s發生后只會導致G6的激活狀態變為2,其他FSA模型的狀態不會受影響.
為了將G1~G9耦合在一起,引入如下并行操作[12].給定H1=(Q1,∑1,δ1,Γ1,q01)和H2=(Q2,∑2,δ2,Γ2,q02),H1和H2并行產生H=Ac(Q1×Q2,∑1∪∑2,δ,Γ1‖2,(q01,q02)),其中,任給(q1,q2)∈Q1×Q2和σ∈∑1∪∑2,若σ∈Γ1(q1)∩Γ2(q2),那么,δ((q1,q2),σ)=(δ1(q1,σ),δ2(q2,σ));若σ∈Γ1(q1)/∑2,那么,δ((q1,q2),σ)=(δ1(q1,σ),q2);若σ∈Γ2(q2)/∑1,那么,δ((q1,q2),σ)=(q1,δ2(q2,σ));其他情況,δ((q1,q2),σ)沒有定義.Ac表示取有限自動機由初始狀態可到達部分.
交叉口FSA模型由G1~G9并行產生.正式地,基于有限物理空間的交叉口FSA模型為:
G=G1‖G2‖…‖G9=(X,E,f,Γ,x0)
任給x=(x1,x2,…,x9)∈X,x1~x5,分別表示當前時刻路權a~e所處狀態,x6~x9分別表示當前時刻路段1~4上的車輛到達交叉口的情況.Γ(x)可以理解為當前時刻可以選擇觸發而不會導致車輛相撞的事件集合.例如,任意給定激活狀態x=(1,0,0,0,0,3,0,0,0),此時路段1上有一輛左轉車輛到達交叉口,另外路權a被一輛從路段1上駛入的左轉車輛占據.若觸發事件σael∈Γ(x),占用路權a的左轉車輛從路權a駛入路權e,系統激活狀態(0,0,0,0,1,3,0,0,0).相反,若選擇觸發事件集合Γ(x)以外的事件,例如σ1al,則會導致兩輛車輛在路權a相撞.由于我們不能控制車輛是否到達交叉口,因而系統的不可控事件集合為Euc={σis,σir,σil:?i=1,2,3,4},可控事件集合Ec=E/Euc.
3.2.4 交叉口GFSA模型
FSA模型可以表達系統所訪問的狀態序列和導致這些狀態轉換的相關事件,但卻不能表達系統何時進入特定的狀態或系統保持這種狀態的時間.然而,在模型的控制過程中我們常常需要考慮事件序列發生時間的長短,因此,在交叉口的GFSAG=(X,E,f,Γ,x0,c)模型中我們定義了所有事件發生需要滿足的時鐘條件.
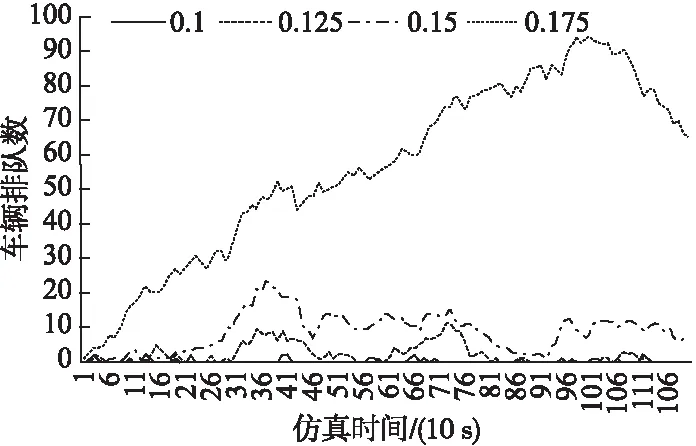
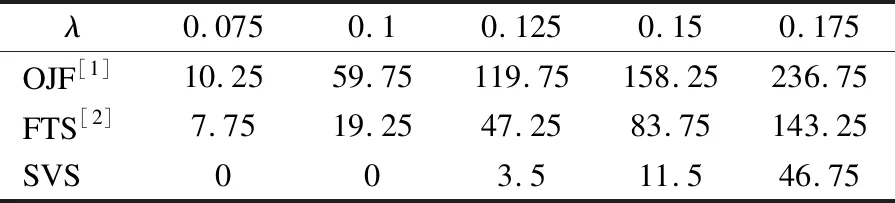
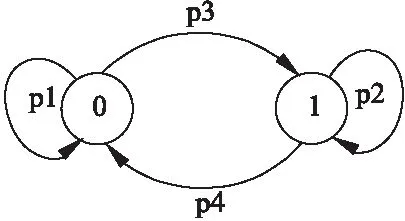
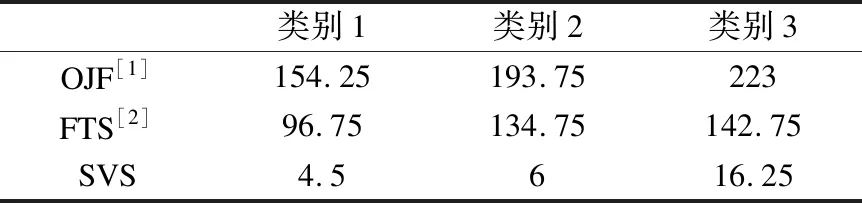
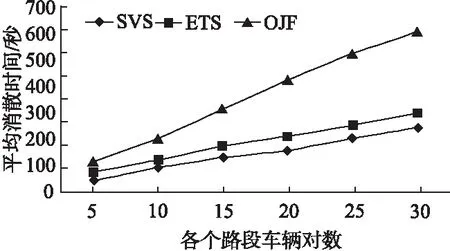
事件發生條件函數c定義如下:以事件σads和σ1as為例,不難發現,只有直行車輛從路段1完全駛入路權a后,才有可能繼續從路權a駛入路權d,所以說事件σads只有在事件σ1as發生結束后才可能被觸發.任意給定事件σ∈E,定義π(σ)為事件σ最近一次觸發距離當前時刻的時長.若σ未曾發生,則定義π(σ)=0.根據 3.1節的定義,t(σ)為事件σ發生所需時間.若σ未曾發生,定義t(σ)=-∞.事件σads的發生條件函數可以定義為:如果π(σ1as)≥t(σ1as),則c(σads)=1;否則,如果π(σ1as) 表1 可控事件發生條件Table 1 Occurrence conditions for controllable events 事件的σ1as發生條件則要根據路段1上車輛到達交叉口情況來決定.具體地,事件σ1as的發生條件函數定義為:如果π(α1s)≥t(α1s),則c(σ1as)=1;如果π(α1s) 在無信號交叉口的控制過程中要防止死鎖的出現.所謂死鎖是交叉口當前車輛所處位置互相阻礙對方前行的一種狀態.例如,若此時路a權被一輛由路段1駛入的直行車輛占用,路權b被一輛由路段3駛入的直行車輛占用,路權c被一輛由路段2駛入直行車輛占用,路權d被一輛由路段4駛入的直行車輛占用.在當前情形下,這4輛車輛互相阻礙對方的前進方向都無法駛離當前位置,因而形成死鎖.定義1正式地給出了死鎖狀態的定義. 定義1.任意給定x=(x1,x2,…,x9)∈X,如果不存在s∈E*使得f(x,s)=x0,則稱狀態x為死鎖狀態. 由定義1可知,死鎖狀態是一些不能返回初始狀態的狀態.直觀上,當系統到達這些狀態時,不存在通行序列使當前交叉口通行車輛駛離交叉路口.在控制交叉口車輛通行的過程中,死鎖狀態是要嚴格禁止到達的. 本節設計控制器調節交叉口車輛的通行次序.不失一般性,可控事件σ∈Ec的發生條件記為π(σ′)≥t(σ′),事件集合E記為E={σ1,σ2,…,σm}.設第k步,系統所處狀態、事件σ最近一次發生距離當前時刻時長、事件σ最近一次發生所需時間、選擇觸發的事件分別為xk、πk(σ)、tk(σ)、αk,定義Ψk=Ψ(xk,πk(σ1),…,πk(σm),tk(σ1),…,tk(σm),αk)為觸發事件ak需要等待的時間.以下算式計算得出了將當前到達交叉口的車輛和交叉口內的通行車輛完全排空所耗費時間最少的車輛通行序列. (1) s.t.(?i=0,1,…,nk)ak+i∈Ec (2) f(xk,akak+1…ak+nk)=x0 (3) 其中,迭代過程為: ?z=k+1,k+2,…,k+nk,Ψz=Ψz-1+τz-1 (4) (5) 對所有σ∈E, (6) (7) xz=f(xz-1,az-1) (8) 需要指出的是,雖然我們計算了接下來nk步內的最優車輛通行序列,然而該序列是基于當前時刻交叉口的車輛情況計算得出的,在執行上述序列的同時可能存在新的車輛到達交叉口(不可控事件的發生).因而,實際中我們只執行所計算最優通行序列中的第1步,在第1步執行結束后,基于系統最新狀態和參數,再次執行上述優化過程,計算下一步的通行控制策略. 本文的仿真環境為MATLAB,仿真精度為1s,也就是說系統每隔1s更新一次控制策略.本文假定1)各個駛向交叉口方向上單位時間內的車輛到達數符合泊松分布;2)各個方向上的到達車輛右轉、直行、左轉的概率分別為0.2、0.4、0.4;3)所有事件的發生時間符合參數為0.5的指數分布.表2給出了事件發生時間概率分布關系. 表2 事件發生所需時間的概率分布關系Table 2 Distribution of the time taken to execute an event 本節展示了所設計基于交叉口有限物理空間的車輛調度算法(Spatial-based vehicle scheduling,SVS)在仿真周期內的車輛排隊數,以及將有限車輛全部調度完畢的耗費時間,并與目前交通控制系統中信號燈交通控制方式進行對比分析. 首先考慮各個駛向交叉口方向上單位時間內的車輛到達數符合數學期望一致的泊松分布的情況(平衡車流).不失一般性,假設數學期望為λ. 圖4 不同λ取值下車輛排隊長度的比較Fig.4 Queue length with different values of λ 圖4給出了當λ取不同數值時1200s內交叉口車輛排隊總和.在圖4中每隔10s記錄一次車輛排隊數據,第10次取樣數據即為100s時交叉口車輛排隊長度總和.如圖4所示,當λ=0.1,0.125,0.15時,SVS能夠確保交叉路口的排隊車輛不高于25輛,顯示出了較強的魯棒性.當λ=0.175時,隨著時間的增加,交叉口出現了大量的排隊車輛.這說明基于單個交叉口的控制難以控制相對較大的車流量.此時需要多個相鄰交叉口、路段之間的協同控制.接下來,在平衡車流下測試了OJF算法[1]、FTS算法[2]和SVS算法在不同車流量下的表現. 表3 3種算法在平衡車流下車輛排隊長度比較Table 3 Comparison of queue lengths in three algorithms 表3給出了平衡車流下,在3種算法控制下交叉口車輛排隊數隨著參數 的變化過程.所有數據為4次實驗的平均值,每次實驗仿真時長為10分鐘.通過表3可知,在不同車流量下,本文提出的SVS算法仿真周期內排隊車輛明顯更小;特別是當λ=0.1,0.125,0.15時,SVS較OJF和FTS顯示出較強的魯棒性.這是因為,當車流量較小時,OJF算法和FTS算法需要多次切換相位以滿足控制需求,從而損失更多的時間(黃燈時間).當λ=0.175時,FTS和SVS仿真周期內的排隊車輛都呈現大幅度增長.當交叉口的到達車輛趨向飽和時FTS相位切換的次數減小,然而,由于OJF每次只處理一輛車輛,其相位切換次數不會隨著車流的變化而發生明顯的變化,相比FTS由于相位的頻繁切換而導致的損失時間更大,因而,仿真周期內OJF的表現明顯遜色于FTS和SVS. 圖5 馬爾科夫模型Fig.5 Markov model 上述實驗認為各個路段的車輛到達情況一致.然而在現實中每個路段的車輛到達情況隨著時間的變化會發生相應變化.為描述這種變化,引入如圖5所示馬爾科夫模型.模型一共有兩個狀態,系統狀態的轉移概率分別為p1、p2、p3、p4.假設系統狀態的初始狀態為0.模型下一步的狀態只與系統當前步所處狀態相關,而與之前所處狀態無關,并且狀態轉移概率不受時間的影響.假設當模型處于狀態0時,車輛到達隨機數滿足數學期望為λ1的泊松分布,處于狀態1時,滿足數學期望為λ2的泊松分布.由于狀態在仿真過程的每一步都可能發生轉移,考慮到車輛的到達率在短時間內發生改變的概率比較低,我們設定如下狀態轉移概率:p1=0.8、p2=0.8、p3=0.2、p4=0.2. 表4 參數λ1和λ2的取值Table 4 Values of λ1 and λ2 表5 3種算法在非平衡車流下車輛排隊長度比較Table 5 Comparison of queue lengths in three algorithm 表4給出了一些較大車流量下的參數取值.表5展示了當參數λ1和λ2的取表4所列類別的數值時,在3種算法的控制下,10min的仿真周期內交叉口的車輛排隊情況.總體來講SVS的表現明顯要優于OJF和FTS.OJF和FTS在非平衡車流下的表現要劣于其在平衡車流下的表現.除類別3外,SVS顯示出很好的車輛調度效果,對非平衡車流表現出很好的魯棒性.在類別3,SVS出現一定的不穩定性,但相對OJF和FTS,仍然顯示出了很好的控制效果.接下來我們測試當路段1~4的車輛排隊數為5、10、15、20、25、30時,3種算法將車輛調度完畢所消耗時間.實驗結果如圖6所示. 當路段1~4的車輛排隊數為5、10、15、20、25、30時,SVS將所有車輛消散的平均耗時相比于FTS控制方法分別減少了43.1%、22.4%、25.7%、26%、19.1%和17.8%,相比于OJF控制方法分別減少了61.5%、53.3%、58%、63%、60.7%和59.5%.顯然,本文所提出SVS算法的平均車輛消散時間相比于OJF和FTS有比較明顯的減少. 圖6 3種算法車輛調度時間對比Fig.6 Comparison of scheduling time among three algorithms 智能交通是未來交通系統的發展趨勢,車路協同技術是是發展智能交通系統的重要一環,其目標是實現自治車輛和智能路側設備之間的協同關系,確保交通系統的安全高效.本文就車路協同技術的問題之一,無信號交叉口的車輛調度方法展開了相應研究.為實現車輛對交叉口有限物理空間的最大利用,將交叉口劃分為不同的區域資源,并建立相應的資源調度模型,以最大化通行效率作為優化目標建立目標函數,求解得到車輛的最優通行次序.實驗結果顯示,較傳統有信號控制方案,新方案在保證車輛行駛安全的同時,極大地提高了車輛通過交叉口的效率. 本文集中研究單個交叉口的車輛通行控制方法,接下來將考慮更加復雜的情況,對多個交叉口和道路之間的車輛協同調度方法展開研究.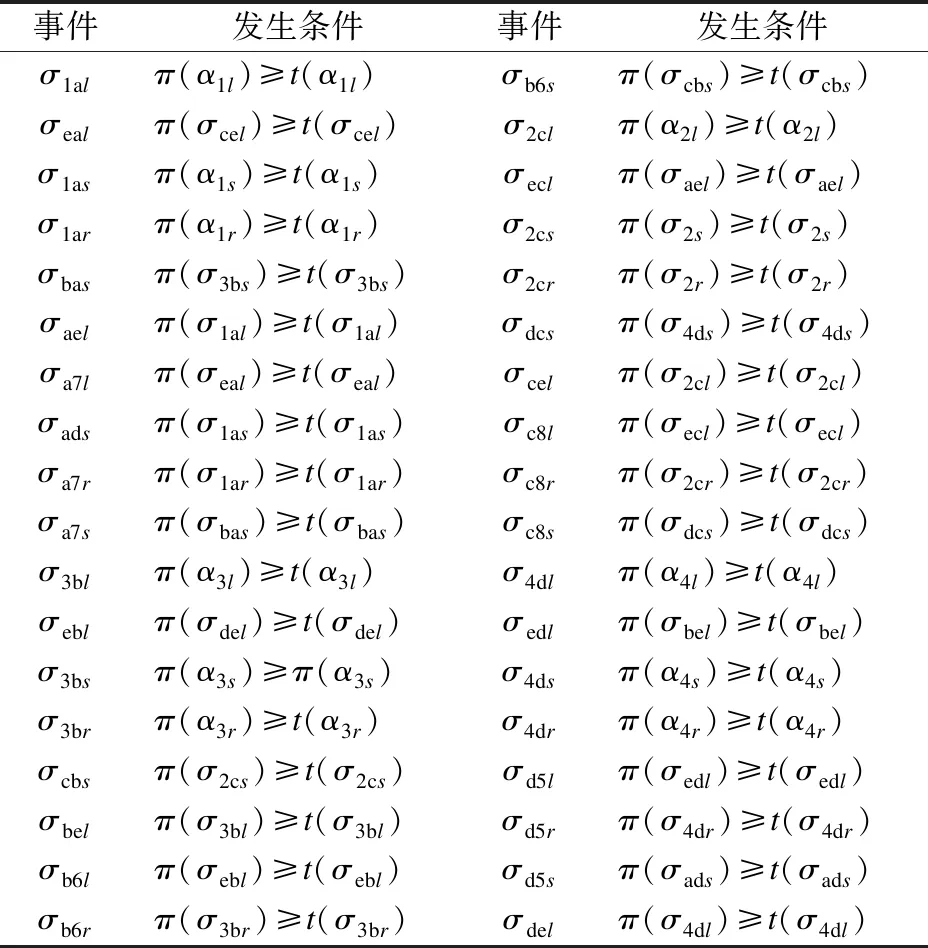
3.3 死鎖狀態
4 優化控制

5 實驗與分析
5.1 實驗設置

5.2 仿真實驗

6 總 結
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38海峽姐妹(2020年9期)2021-01-04 01:35:44中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26數學物理學報(2020年2期)2020-06-02 11:29:24光學精密工程(2016年6期)2016-11-07 09:07:19山東青年(2016年1期)2016-02-28 14:25:25核科學與工程(2015年4期)2015-09-26 11:59:03當代修辭學(2014年3期)2014-01-21 02:30:44公務員文萃(2013年5期)2013-03-11 16:08:37