某型導彈輸出指令組件傳遞函數故障分析與排除
2021-04-12 12:02:26程蒙蒙高懷平涂遠欣馬培娜
航空維修與工程 2021年2期
程蒙蒙 高懷平 涂遠欣 馬培娜
摘要:通過對某型導彈導引頭輸出指令組件的工作原理分析和研究,掌握了輸出指令組件傳遞函數Ω參數故障發生原因及其機理,建立了故障樹;為了解決輸出指令組件輸出數據無法直接讀取的困難,利用Arduino控制芯片、穩壓集成電路等器件搭建了輸出指令組件自動測試平臺,完成了輸出指令組件相關數據的采集與分析,最終實現了對輸出指令組件傳遞函數不合格修理。
關鍵詞:傳遞函數;測試平臺;故障分析
Keywords:transfer function;testing platform;fault analysis
0 引言
某型導彈為進口型空空導彈,用于殲擊機在空戰近距離格斗時攻擊敵機,并具有對地面熱目標的攻擊能力,能夠全向攻擊目標和近距離發射,在晝夜、云霧中和有干擾條件下均可戰斗使用[1]。該型導彈導引頭輸出指令組件主要負責處理、生成控制舵面偏轉的視線角速度信號,根據指令調整信號的放大倍率,還能實現偏角補償、超前偏置以及基準信號整形功能,對導彈跟蹤目標起著重要作用。該型導彈導引頭日常修理過程中,當出現輸出指令組件傳遞函數Ω不合格時,由于缺少輸出指令組件測試設備,無法對故障組件進行直接測試、修復,通常采取換備件的方式修理,修理成本較高。為了解決這一問題,需要對輸出指令組件進行研究并搭建測試平臺,以最終形成對輸出指令組件傳遞函數故障的修復能力。
1 原理分析
輸出指令組件傳遞函數Ω(視線角速度信號)是導引頭輸出指令組件核心參數[2]。輸出指令組件負責處理、生成控制舵面偏轉的視線角速度信號Ω1、Ω2,根據指令調整Ω信號的放大倍率并綜合偏角補償和超前偏置,負責極坐標角速度Ωпол信號的輸出以及基準信號整形等功能。輸出指令組件的工作原理圖如圖1所示。輸入陀螺線包感應的偏轉信號、框架角信號,經過補償電路形成極坐標形式的視線角速度信號;視線角速度信號與基準信號配合解調出極坐標形式的視線角速度信號Ω1和Ω2;載機根據初始條件形成的指令經指令和系數形成裝置,變成K1、K3、K4指令送導引頭。K1、K3、K4指令影響Ω1和Ω2信號的放大比例系數;近區電路的相關指令控制K指令封鎖電路和超前偏置電路。其工作原理可分為三個模塊。
1)Ω信號測試原理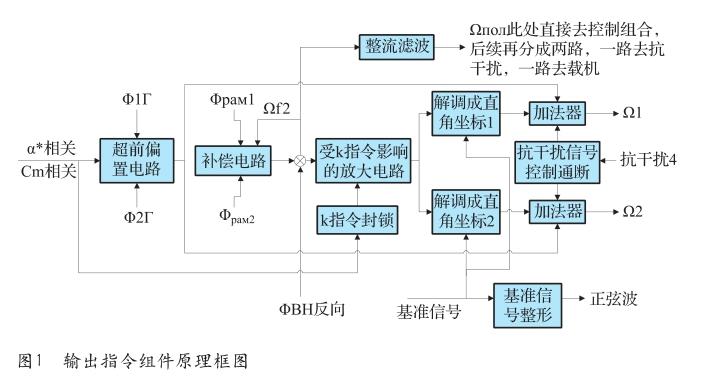
極坐標形式的角速度信號Ωf2輸入組件,經過Φ角補償電路與框架角Φрам補償融合;經過K指令比例放大電路進行放大;放大后的極坐標信號與基準信號共同作用,解調成直角坐標形式的視線角速度信號Ω1、Ω2。當超前偏置電路起作用時,框架角ΦГ會通過解調電路中的加法器影響Ω1、Ω2信號幅值。
2)極坐標角速度信號測試原理
極坐標形式的角速度信號Ωf2信號經過運算放大器N6進行半波整流后,經過濾波和跟隨器形成Ωпол1輸出。Ωпол1經過受邏輯開關控制的運放N5后形成Ωпол2信號。
3)基準信號測試原理
方波形式的基準信號進入輸出指令組件,經過整形電路形成正弦波形式從20和21腳輸出。這兩個通道的正弦波再經過比較器形成一定占空比的方波,從17和19腳輸出。
2 信號分析
載機根據初始條件形成的指令經指令和系數形成裝置,變成K1、K3、K4指令送導引頭。K指令控制視線角速度信號Ω的最大值,分別有K1、K2、K3、K4四種狀態(其中K2為初始狀態)。Ω有兩個通道Ω1、Ω2。采集的參數為K2指令下,直角坐標形式的視線角速度信號Ω1、Ω2;K1指令下,直角坐標形式的視線角速度信號Ω1、Ω2;K3指令下,直角坐標形式的視線角速度信號Ω1、Ω2;K4指令下,直角坐標形式的視線角速度信號Ω1、Ω2。8個參數形成信號的電路部分全在導引頭輸出指令組件中。
依據輸出指令組件電路及原理分析,輸出指令組件所需電源為±12V電源,所需信號為Ωf2信號、基準信號(Фон1和Фон2)、導彈偏轉信號CM、邏輯電平α*、控制指令Tупр、位標器偏轉信號ΦГ和框架角Φрам。其中,依據某型導彈導引頭測試參數,選擇Ωf2信號為峰峰值5V、基波頻率100Hz、調制頻率1Hz的AM調制信號;ΦOH1、ΦOH2信號為峰峰值20V、頻率100Hz的方波信號;控制指令Tупр為27V電壓;導彈偏轉信號CM和邏輯電平α*為12V電壓;位標器偏轉信號ΦГ為5V電壓;框架角Φрам為12V電壓。
3 測試平臺研制與數據采集
輸出指令組件是某型導彈導引頭電子組件組成之一,與之相關的測試參數通過導引頭測試臺采集。由于無法對輸出指令組件進行直接測試,制約了輸出指令組件的修理,現根據輸出指令的原理分析以及信號機理分析,研制輸出指令自動測試平臺,以解決輸出指令組件的測試難題。
3.1 測試平臺研制
輸出指令組件測試平臺如圖2所示,主要由arduino控制芯片、顯示屏、穩壓集成電路、繼電器等組成。輸出指令組件通過巨型連接器與測試平臺連接。該平臺采用arduino控制芯片對測試程序和功能進行升級,實現了繼電器控制、數字量輸出和模擬量采集,滿足輸出指令組件所有信號的輸入、輸出、通斷與延時。配合顯示屏實現了示波器和數據顯示功能。必要時可外接信號發生器、示波器以對細節進行測試。輸出指令組件的整個測試程序可以通過該測試平臺自動實現,通過開關來控制測試程序的中斷。輸出指令組件測試平臺工作原理如圖3所示。
3.2 信號采集
無外部補償和超前偏置時,測試K指令比例放大系數對Ω1、Ω2信號的影響。
給組件供±12V電源及接地。按第2節給出的條件加入Ωf2信號和基準信號。Φрам1、Φрам2、Φ1Г、Φ2Г四路信號接地,CM、α*腳接12V電壓。初始狀態時為K2狀態,測試平臺采集Ω1、Ω2幅值波形圖,如圖4所示。
將3腳接27V電壓,此時為K1狀態,測試平臺采集Ω1、Ω2幅值波形圖,如圖5所示。
將4腳接27V電壓,此時為K3狀態,測試平臺采集Ω1、Ω2幅值波形圖,如圖6所示。
將7腳接27V電壓,此時為K4狀態,測試平臺采集Ω1、Ω2幅值波形圖,如圖7所示。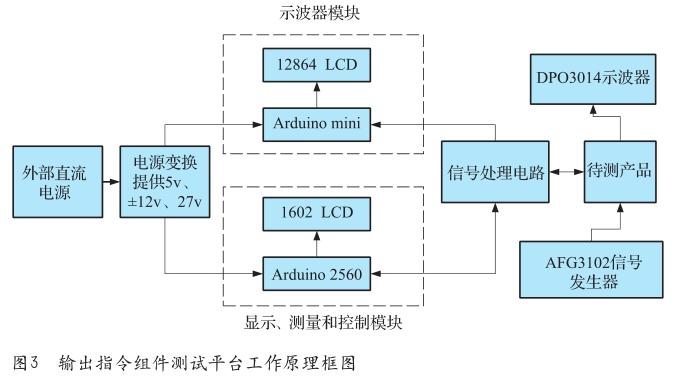
通過上述信號采集可以看出四種狀態下兩個通道的波形與幅值。通過對故障組件的信號采集,故障情況可以分為以下幾種類型:四種狀態下兩個通道故障,即K1、K2、K3、K4 狀態下Ω1、Ω2通道信號波形或幅值故障;四種狀態下某一通道故障,即K1、K2、K3、K4 狀態下Ω1通道信號波形或幅值故障,K1、K2、K3、K4 狀態下Ω2通道信號波形或幅值故障;某一狀態下兩個通道故障,即K1(K2、K3、K4)狀態下Ω1、Ω2通道信號波形或幅值故障。
4 故障情況
4.1 故障樹
通過對影響導彈輸出指令組件傳遞函數Ω信號不合格的相關因素進行分析,建立導彈傳遞函數Ω測試不合格故障樹,如圖8所示。
根據故障樹分析可知,導彈傳遞函數Ω信號三種故障模式所對應的不合格因素有輸出指令組件電路故障和輸出指令組件輸入信號故障兩大因素,其中,電路故障可能為補償電路故障、限幅放大電路故障、解調電路故障、濾波電路故障。
4.2 故障分析
對于四種狀態下兩個通道故障,主要故障因素為補償電路故障、限幅放大電路故障、輸入信號故障。補償電路主要是Φ角補償電路與框架角Φрам補償,在各種角度下保持視線角速度的真實和穩定,電路中三角波發生器、模擬開關、電阻故障率較高;另外補償電路中涉及三路信號(角速度信號Ωf2、陀螺轉子與定子間夾角Фвн、平臺框架的偏轉角信號Фрам1、Фрам2)輸入,所以四種狀態下兩個通道故障與角速度信號Ωf2、陀螺轉子與定子間夾角Фвн、平臺框架的偏轉角信號Фрам1、Фрам2有關。又由于極坐標形式的角速度信號Ωf2由陀螺旋轉組件提供給輸出指令組件,陀螺轉子與定子間夾角Фвн由陀螺位置與定子軸之間的誤差角產生,平臺框架的偏轉角信號Φрам1、Φрам2由位標器框架偏轉生成,所以四種狀態下兩個通道故障也與位標器框架、位標器陀螺、位標器線包和陀螺旋轉組件有關。限幅放大電路是按照不同的比例系數K(K1、K2、K3、K4)進行放大,先放大后縮小,比例值不同。該電路中運算放大器、模擬開關故障率較高。
四種狀態下某一通道故障的相關因素為解調電路故障和濾波電路故障,解調電路是將極坐標形式視線角速度信號解調成直角坐標形式的視線角速度信號,該電路中運算放大器、模擬開關故障率較高。另外,解調電路有基準信號輸入,所以基準信號對四種狀態下某一通道故障存在影響。基準信號由陀螺旋轉組件產生,如果陀螺旋轉組件故障,會影響基準信號的生成,對導彈傳遞函數視線角速度Ω也存在影響。濾波電路主要是濾除高頻分量,該電路中電容、運算放大器、電容故障率較高。
某一狀態下兩個通道故障相關因素為限幅放大電路故障,針對具體某一狀態,排查與之對應的模擬開關、運算放大器。
5 故障排除
該型導彈某一故障表現為K2指令下Ω2通道信號波形不合格,K1指令下Ω2通道信號波形不合格,K3指令下Ω2通道信號波形不合格,K4指令下Ω2通道信號波形不合格。從上述參數定義可以看出,各指令下Ω2信號輸出波形不合格,即四種狀態下某一通道故障。該故障的相關因素為解調電路故障和濾波電路故障,或者基準信號故障。
對基準信號(Фон1、Фон2)進行排查,測得Фон1、Фон2信號是峰峰值為20V、頻率為100Hz的方波信號,基準信號(Фон1、Фон2)合格。對解調電路進行排查,在Ω2信號輸出波形測試條件下,使用示波器測量解調電路中運放1N16的輸入端(見圖9),4腳輸入端輸入波形合格,6腳輸入波形不合格;測量圖號為1S2A的模擬開關的1腳輸出端, 1腳波形不合格。由此可以判斷,1S2A模擬開關故障,使得Ω2信號輸出波形測試不合格。更換模擬開關1S2A后,輸出指令組件測試合格,導引頭測試合格。
6 結束語
以某型導彈導引頭輸出指令組件傳遞函數Ω參數故障為研究對象,設計了輸出指令組件自動測試平臺,通過對相關信號采集及理論分析,對導引頭輸出指令組件傳遞函數Ω參數影響因素進行逐一研究,并建立了故障樹,最終實現故障定位。通過文中的研究方法,解決了該型產品的修理瓶頸,提高了該型導彈導引頭輸出指令組件的排故效率,節約了修理成本。
參考文獻
[1]鄭志偉.空空導彈系統概論[M].北京:兵器工業出版社出版,1997.
[2]吳晗平.紅外搜索系統[M].北京:國防工業出版社,2013.
作者簡介
程蒙蒙,工程師,主要從事導彈修理及導彈測試機理研究。