船舶機艙輔機設備振動監測系統設計
2021-04-14 02:03:36王之民陳松濤胡祥平
江蘇船舶 2021年1期
王之民,陳松濤,胡祥平
(鎮江賽爾尼柯自動化有限公司,江蘇 鎮江 212000)
0 引言
船舶輔機設備運行工況為短時大功率、連續啟停或連續高速運行等,變工況和輔機設備所處的復雜工作環境共同加快了設備磨損,且自身產生并疊加船體振動,易導致設備故障。如不及時排除隱患,將造成輔機設備不可逆的損壞,增加設備額外的維修費用[1]。
受制于國外價格高昂的振動監測系統,船東無法為船舶大面積裝配在線式振動檢測系統,更多采用手持式振動檢測裝置。雖然手持式振動檢測裝置檢測速度快且結果精確,但是完成眾多設備的單次檢測周期仍耗時較長。此外,還因為周期性監測的原因,無法在第一時間檢測到設備故障的發生。
本文基于三軸加速度傳感器模塊設計了振動狀態采集模塊。該模塊在Modbus協議的基礎上結合WPF框架開發上位軟件并根據振動烈度評價標準,實現對船舶輔機設備振動狀態的實時監測,并能夠及時監測到異常振動狀態,從而避免了有害振動對輔機設備造成進一步損害。
1 監控系統總體設計
1.1 系統功能要求
為滿足未來船舶的發展需求,結合中國船級社《智能船舶規范》(2020),設計了振動監測系統。該系統可實現對輔機振動狀態的實時監測,并將數據存儲進數據庫,以解決傳統檢測方式耗時且無法第一時間發現故障的問題。具體功能包括:
(1)實時振動數據查詢:對于所有被監測的輔機設備,能夠在上位機端實時顯示其振動頻譜與振動烈度評級。
(2)振動異常報警:當輔機設備出現振動異常情況,提示報警,并存儲報警信息。
(3)歷史數據查詢:能夠查詢特定時間段的歷史數據。
(4)手動存儲:針對特定振動狀況能夠手動存儲當前的振動數據。
(5)定時存儲:能夠定時存儲所有監測輔機設備的振動數據。
1.2 系統總體設計
整個系統由振動傳感器模塊、數據采集服務器和上位機3個部分組成。振動傳感器模塊包括加速度傳感器、主控單元和通訊模塊。加速度傳感器采用微機電系統(MEMS)加速度傳感器,通過主控單元將實時數據進行預處理、加窗、快速傅里葉變換后傳輸到數據采集服務器,再由數據采集服務器轉發到上位機。其系統結構框圖見圖1。
2 振動傳感器模塊硬件設計
振動傳感器模塊主要由MEMS傳感器、MCU模塊和通訊模塊共同組成。MEMS振動傳感器具有低功耗、輕質量、高靈敏度、低噪聲值的特點[2],能夠較好地采集輔機設備的振動信息。本系統設計采用ADIS16227型號的加速度傳感器。該傳感器最大檢測加速度為70g,最大采樣頻率為100.2 kHz。MCU模塊采用STM32F103低功耗ARM微處理器,通過SPI接口與傳感器進行數據通訊。
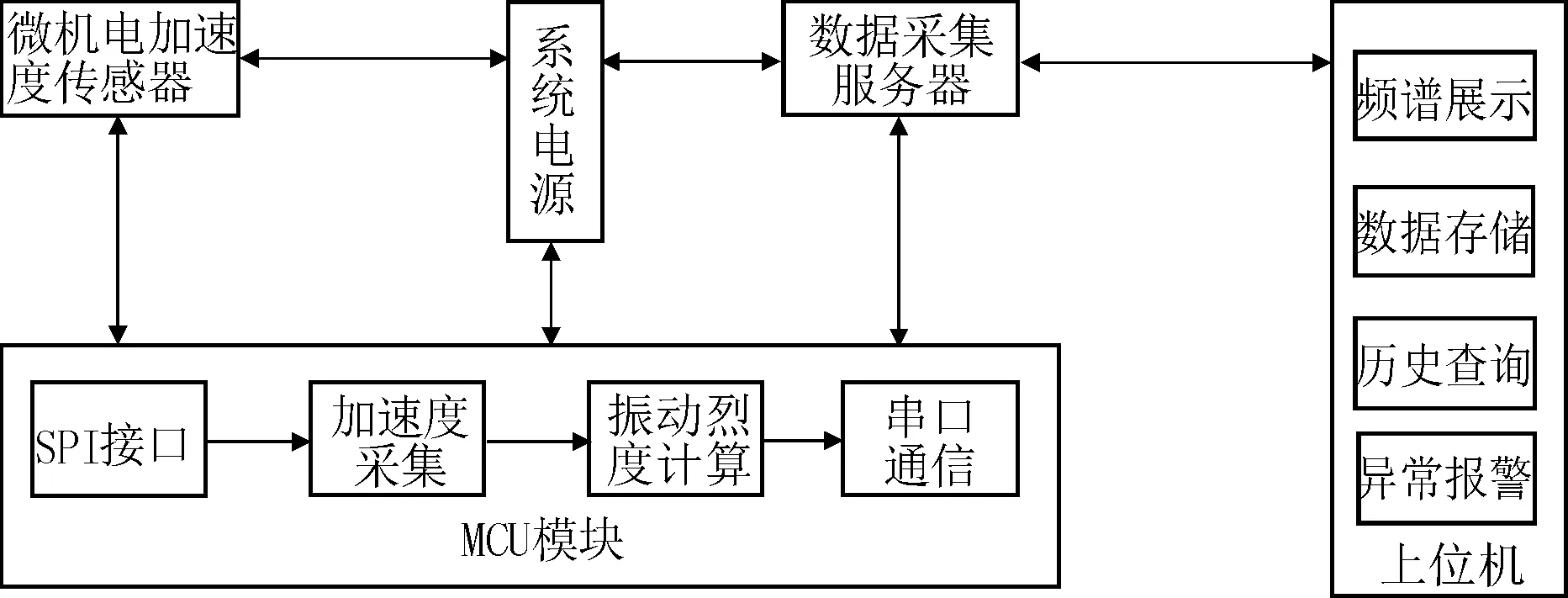
圖1 系統結構圖
3 振動信號處理
船舶輔機設備健康評估通常采用振動速度作為判斷依據。在實際工程中,受到傳感器的制約,大多數情況下只能得到振動加速度信號。本文從傳感器讀取加速度信號后進行積分處理得出速度信號。對于積分方式,主要有時域積分和頻域積分2種[3]。
3.1 時域積分
從傳感器得到的振動加速度信號,即時域加速度信號序列為
a=a(k),k=1,2,…,N
式中:a為加速度信號序列;k為某一個點的采樣序號;N為采樣點數。
加速度信號包含了傳感器噪聲和直流分量,需對原始數據進行零均值處理,消除趨勢項,則有如下公式:

根據梯形積分法[4],對應速度時域序列為
式中:v(k)為時域速度序列;Δt為采樣間隔。
3.2 頻域積分
頻域積分原理主要利用傅里葉變換的積分原理,對去除趨勢項的加速度信號a′進行傅里葉變換,同時為了減小頻譜泄露加入漢寧窗得到:

式中:A(k)為經處理后時域加速度信號傅里葉變換序列;w(n)為漢寧窗序列;a′(n)為時域加速度值;j為虛數單位[5];n為某一個點的采樣序號。
根據頻域積分定理,則速度頻譜為
式中:V(k)為速度頻譜序列;A(k)為加速度頻譜序列;fs為采樣頻率;j為虛數單位。
3.3 仿真對比
為了對比2種方法的優劣,假設加速度信號為
a=100πcos 100πt-200πsin 60πt+
300πsin 300πt+μ
式中:μ為隨機噪聲。
設定采樣頻率為1 566 Hz,采樣點數為512。利用時域和頻域2種積分方式得到的速度波形對比結果見圖2。圖中,橫坐標t為采樣時間,縱坐標v為速度值。
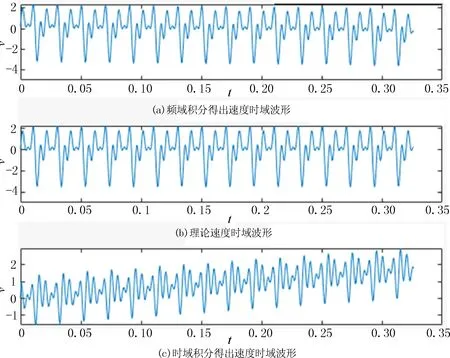
圖2 2種積分方式對比圖
采用平均峰值誤差作為評價標準,時域積分平均峰值誤差為36.50%,頻域積分平均峰值誤差為5.62%。從圖2可以看出,時域積分誤差較大,并且出現明顯偏移。在實際開發中使用頻域積分方法,可以避免出現原理性偏移的現象。
3.4 振動烈度計算
振動烈度定義為某一頻率范圍內振動速度的均方根值,能夠反映一臺機械設備的振動狀態。根據上節結果,本設計采取頻域積分的方式計算振動烈度。速度頻譜為
式中:W(k)為圓周序列。
由于加窗會對加速度信號的幅值譜產生影響,需要加入恢復系數K[6]。本設計中窗函數為漢寧窗,所以K=2.667。則振動速度有效值為
式中:Vrms為振動速度有效值。
本設計采用的三軸加速度傳感器能夠采集3個分量上的振動信號,根據《船舶機艙輔機振動烈度的測量和評價》,最終輔機設備的振動烈度Vs為
式中:Vs為輔機設備振動烈度值;Vxrms、Vyrms、Vzrms分別為3個互相垂直方向上的振動速度均方根值。振動烈度計算流程見圖3。

圖3 振動烈度計算流程
4 上位機開發
開發基于WPF框架的船舶輔機設備振動監測軟件,其核心程序包括振動數據讀取、振動烈度計算和數據存儲。數據讀取采用定時讀取方式,上位機通過標準ModbusTcp協議從數據采集服務器讀取振動加速度數據,并進行振動烈度計算。由于振動監測數據量大,因此對數據庫存儲和管理要求較高。根據單次采集三軸振動數據量,定時存儲時間設置為10 min,同時可以通過手動存儲按鈕進行數據主動保存。采用MySQL數據庫,根據日期+設備名的方式創建表,按照時間、振動烈度值、時域數據等不同參數創建列。上位機軟件可以指定時間段查詢歷史數據,并可將查詢結果導出至EXCEL。
5 結論
(1)本文振動監測系統利用傅里葉變換中頻域積分的原理,得出加速度與速度之間的轉換關系。
(2)利用成熟的Modbus協議與配套開發的上位機系統,實現了振動數據的采集、顯示與存儲,克服了傳統監測方式中無法第一時間監測到設備異常振動的問題,同時為設備振動分析提供數據依據。
本系統在“中華復興”號客滾船一段時間的運行使用,驗證了檢測系統的穩定可靠,有效地提高了管理人員對機艙設備的管理能力,減少了因設備異常故障所造成的損失。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中國特種設備安全(2022年6期)2022-09-20 02:52:28
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
