無人機在高山區免像控三維建模航測方法研究
2021-04-15 15:55:24錢俊錦
中國新技術新產品 2021年3期
錢俊錦
(四川中水成勘院測繪工程有限責任公司,四川 成都 610000)
隨著無人機航測技術的普及,利用無人機進行航測成圖和三維建模的方法已經在數字城市建設、工程測量、不動產測繪、水利水電規劃設計以及景點展示等多個領域得到了廣泛應用。近年來,無人機行業發展迅速,從最初的人工飛行發展到自動飛行,再到厘米級定位、仿地飛行等,每一步的發展都極大地提高了傳統測繪的效率。隨著無人機廠商和軟件開發商不斷地對技術進行更新,利用小型無人機在復雜、困難地區進行大比例尺免像控測繪已經成為可能,該文對大疆精靈4RTK無人機在高山區使用免像控航測的方法進行研究。
1 測區概況
測區位于西部高原地區,需要測繪1∶1000三的維模型及地形圖。測區地形屬于高山區,面積約1.5 km2,海拔在3 000 m以上,區域內高差達400 m以上,地勢陡峭;且人員在該區域內有較強的高原反應,種種因素給外業測量帶來了較大的困難。由于地形原因,人員無法按照常規的航測作業方法布設像控點,即像控點無法控制整個測區,如果強制采用像控點作為約束條件進行空三,就可能會造成測區局部精度不能滿足規范的結果;因此,經研究后決定該次測繪采用免像控作業方式,測區現場地形概況如圖1所示。

圖1 測區現場地形
2 無人機航測建模原理
通過無人機搭載的相機(可以是單鏡頭,也可以是多鏡頭)對目標區域按照一定的重疊率,從多角度拍攝多張影像,并通過提取影像上的二維特征點,根據不同影像匹配的同名特征點,用光束法將區域的網平差生成三維點云。建模軟件把從不同視點拍攝的靜態物體的數字影像作為輸入,在幾分鐘/小時的計算時間(取決于輸入數據的大小)內輸出帶紋理的高分辨率三角形網格,最終形成數字影像覆蓋區域的實景三維模型。
3 作業流程
經過現場勘測,決定采用大疆精靈4RTK進行航測作業,整個作業流程如圖2所示。
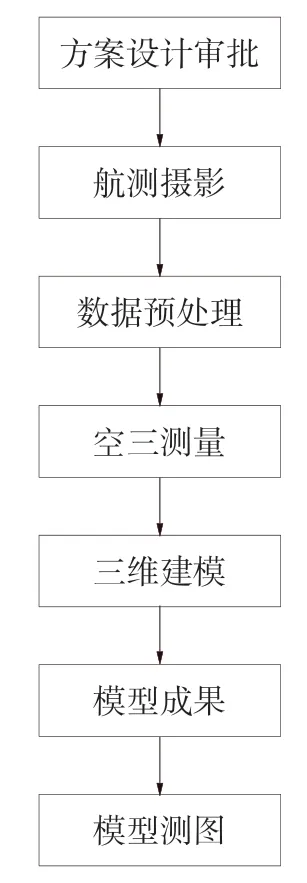
圖2 航測作業流程圖
3.1 大疆精靈4RTK無人機簡介
大疆精靈4RTK無人機具有快速靈活、對起降場地要求低的特點,但同時由于航程較短,它也不適合開展大區域作業。該無人機配備了1英寸2 000萬像素的相機CMOS,搭載了FOV 84 °和8.8 mm/24 mm(35 mm格式等效)鏡頭,其最大飛行高度為500 m,可以通過網絡RTK(實時動態載波相位差分技術)或PPK(動態后處理技術)的方式實現厘米級定位,具備跟隨地形進行仿地飛行的功能,特別適合在高差較大的地區開展高精度航測作業。
3.2 獲取測區的DEM/DSM
由于測區高差很大(400 m),在采用定高飛行時,測區高程較高區域的重疊率和較低區域的分辨率將無法滿足三維建模的要求;因此,為了保證飛行的重疊率和分辨率可以滿足大比例尺地形圖測繪的要求,應該采取無人機跟隨地形進行變高飛行的方式進行航測,即仿地飛行。為了進行仿地飛行,就需要測區的DEM/DSM(數字高程模型/數字表面模型),通常來說,獲取測區的DEM/DSM有以下2種方法:1) 先對測區進行1次低分辨率飛行,以最快的速度利用航測影像生成測區的DSM。其優點是地形精準,無人機飛行時能夠有效地避開測區內高大的突出物;其缺點是必須先進行1次飛行,會影響工作效率。2) 根據各種公開發行的DEM數據,按照測區范圍進行裁切。其優點是不需要先對測區進行飛行,能提高工作效率;其缺點則是DEM數據的實效性不高且無法判別測區內高大的突出物,會影響飛行安全。該航飛測區位于原始森林中,沒有人為因素改變測區地形的情況,且無高大突出的建筑物,因此可以采用公開發行的DEM數據。經過對比,該次作業采用ALOS 12.5 m分辨率的DEM作為仿地飛行的DEM。
ALOS是日本宇宙航空研究所(JAXA)的高級陸地觀測衛星-1(Advanced Land Observing Satellite-1,ALOS)項目。ALOS-12m地形數據來源于ALOS的PALSAR傳感器。2006年~2011年,PALSAR的L波段合成孔徑雷達(SAR)產生了大量的全天候觀測成果。ALOS PALSAR RTC數據集產品自2014年10月開始發布,一年后完成。項目中包括除南極洲、格陵蘭島、冰島和歐亞大陸北部以外的地球上所有陸地區域的精細波束(FBS、FBD)和極化(PLR)數據。
獲得DEM數據之后,將DEM數據導入無人機遙控器中,就可以在遙控器中對仿地飛行的航線進行規劃。
3.3 外業檢查點布設
雖然該次航飛采取免像控的方式,但是為了保證檢查成果的精度,還需要在測區布設檢查點;共布設6個平面檢查點和90個高程檢查點。平面檢查點利用了固定地物和提前布設的對空標志,分布于測區內人員可以到達的區域和測區中部區域,布設樣式為“L”型[1],點位間距約600 m[2]。采用對中桿將GPS設備精確對中之后測量3個測回,每個測回平滑采集30次,測回間GPS設備斷開重連。高程檢查點則在測區內人員能夠到達處隨機采用RTK進行測量,每個高程檢查點平滑采集10次,平面檢查點分布如圖3所示。
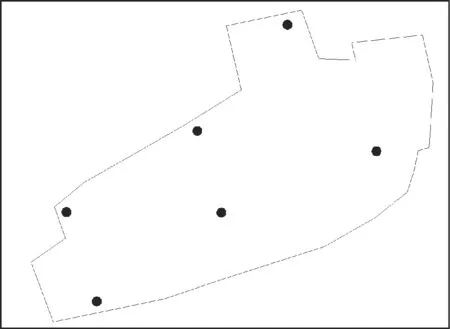
圖3 平面檢查點分布
3.4 無人機航飛
大疆精靈4RTK自帶千尋網絡RTK服務,可以在千尋知寸FindCM的覆蓋區域實現厘米級定位,由于測區位置比較偏遠,且飛行區域的地形較為復雜;因此,為了防止出現因網絡和遙控器失聯等因素造成無人機丟失RTK定位信息的情況,測繪人員在地面架設了靜態觀測基站,從而方便進行后期PPK解算。架設靜態觀測基站之前,首先利用千尋或省級cors(連續運行衛星定位服務參考站)服務測量靜態觀測基站點的經緯度,然后架設靜態基站并按照1 Hz以上的采樣速率進行靜態觀測,需要注意靜態觀測時長必須大于飛行時長,且飛行過程中靜態觀測不能中斷。根據地面分辨率和飛行高度,可得表達式如公式(1)所示。

式中:H為飛行高度;f為相機焦距;a為像元大小;GSD為地面分辨率。
計算結果要滿足1∶1000建模精度的要求,飛行高度不能高于350 m。由于測區高差太大,因此從起飛點起飛超過220 m的飛行高度就會超過大疆無人機500 m飛行高度的限制,為了保證作業成果的質量和飛行安全,最終確定采取相對航高200 m進行仿地飛行。
該次無人機航飛作業的主要參數見表1,航線如圖4所示。
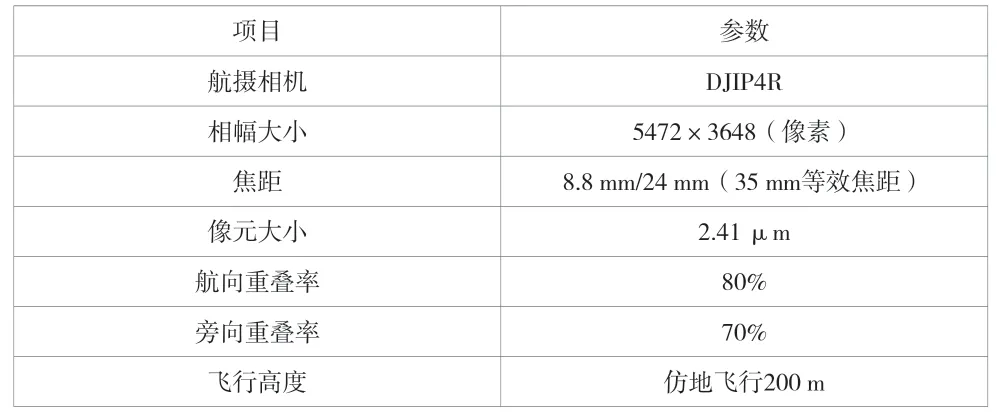
表1 航測參數

圖4 仿地飛行變高航線
3.5 內業處理
該次作業共拍攝了644張影像,有效覆蓋范圍1.73 km2,測區被完全覆蓋并有一定的多余影像,有利于提高測繪的質量。內業處理時,根據靜態觀測的數據,以靜態觀測基站點的經緯度為基準,對無人機記錄的原始觀測數據進行解算,從而得到厘米級定位的高精度無人機航拍影像pos(外方位元素中的線元素)數據。在得到高精度的pos數據之后,利用Photoscan空三結合ContextCapture完成三維建模。Photoscan是由俄羅斯Agisoft公司開發的1款軟件,它可以快速自動化處理無人機的航測影像,具有操作簡便、空三精度高的特點,但其三維建模的效果一般。ContextCapture(原smart3D)則可以根據航測影像自動化生成具有真實紋理的實景三維模型,其生產的三維模型具有效果好、通用性強的特點,但其空三處理能力較弱。因此結合二者的優點對影像進行處理,成果處理的具體作業流程為:將航拍影像導入Photoscan中,再導入pos數據進行空三處理;由于pos為厘米級定位,因此在Photoscan中將pos的精度設置為0.05 m,空三處理完成之后導入平面檢查點進行精度檢查,整個過程中平面檢查點不參與空三運算,只對精度進行檢查。在Photoscan完成處理之后將空三結果以Blocks Exchange(*.xml)的格式導出,隨后在ContextCapture中導入該空三成果,導入完成之后就可以開始進行三維建模,最終形成的三維模型效果如圖5所示。

圖5 三維模型局部效果
3.6 精度檢查
該航測成果的三維模型平均地面分辨率為6 cm,滿足1∶1000地形圖測繪的要求。航測中,共布設6個平面檢查點,由于檢查點數量不足20個,因此根據《測繪成果質量檢查與驗收》規范的規定,按照其誤差的算術平均值計算檢查點中的誤差。根據Photoscan的空三報告得出精度統計,見表2。
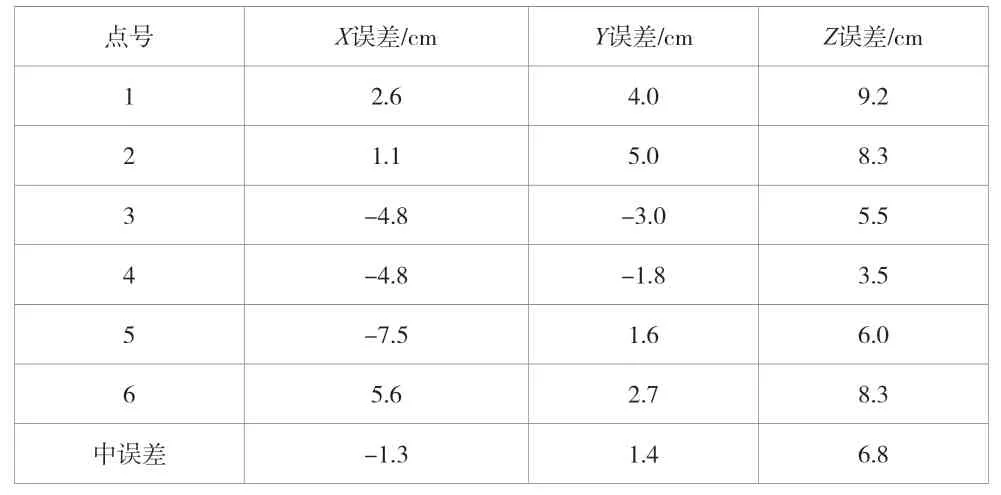
表2 平面檢查點精度統計
在進行精度比較時,將平面檢查點看作地物點。根據《工程測量規范》,地物點的點位中誤差限差為圖上距離0.8 mm(一般地區),則1∶1000地形圖的實際距離限差為80 cm。由精度統計表可以看出,平面檢查點的中誤差滿足規范的要求。
航測中共有90個高程檢查點,檢查方法為在ContextCapture中將航測成果按照0.2 m的間距輸出為las點云,再在Microstation軟件中比較las點云和高程檢查點的高程差。由于檢查點數量大于20個,根據《測繪成果質量檢查與驗收》規范的規定,計算點位中誤差的表達式如公式(2)所示。

式中:M為中誤差;n為檢查點個數。
統計之后得出高程檢查點的精度統計情況,見表3。

表3 高程檢查點精度統計
根據《工程測量規范》,地形為山地時,高程檢查點的中誤差限差為等高距的2/3倍,1∶1000地形圖等高距為1 m,則限差為0.67 m。經統計,高程檢查點的中誤差為0.11 m,滿足規范的要求。
4 結語
在山區進行地形測繪或無人機航測時,地形、測區環境等因素會給大比例尺地形圖測繪和高精度航測建模帶來很大的困難,采用免像控的作業方式,就可以極大地提高工作效率。采用免像控的方式應該注意以下4點:1) 由于山區地勢陡峭,如果采用定高飛行的方式,航測成果的分辨率和重疊度等很難滿足建模的要求,如果不同區域的影像重疊度差別過大,也會影響空三的精度,因此要在山區無人機作業中實現免像控,必須采用仿地飛行的方式。2) 利用大疆精靈4RTK進行仿地飛行時,需要注意開啟無人機的RTK定位功能,如果不開啟,仿地飛行時將不會按照預設的航高進行飛行,就可能會導致分辨率不能滿足測量的要求。3) 要確保pos的精度,即使有網絡RTK信號覆蓋,為了避免中途可能出現的因網絡或遙控器失聯等因素造成RTK 信號丟失的情況,也應該采取ppk模式對觀測數據進行差分處理。4) 當內業空三處理時,在Photoscan中進行空三之前,應該將pos的精度設置為厘米級,如果采用軟件默認設置的精度進行空三,成果將無法滿足對精度的要求。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
故事大王(2016年7期)2016-09-22 17:30:08
衛星與網絡(2015年12期)2015-10-27 02:21:46
