汽車列車主掛車夾角測量方法研究
2021-04-17 02:33:36趙華杰范養強孫學聰
機電產品開發與創新 2021年2期
關鍵詞:測量
趙華杰, 范養強, 孫學聰
(陜西重型汽車有限公司 汽車工程研究院, 陜西 西安 710200)
0 引言
汽車列車是指一輛汽車與一輛或多輛掛車的組合,它具有其他運輸方式無法代替的迅速、 機動、 安全的優勢, 能完成其他運輸方式所不能或難以完成的超高、超寬、超長、有特定要求的物資運輸,尤其對高大貨物運輸具有高效、低耗、及時、靈活的特殊優點。因此汽車列車成了公路交通的主要物流運輸形式,是發展公路運輸、提高經濟效益最有效而簡單的重要手段。
在汽車列車轉向、泊車過程中,主掛車間形成一定夾角,此夾角導致車輛更大范圍的內輪差和盲區,這是諸多交通事故發生的一大根源。 此外, 在ADAS(Advanced Driver Assistance System,高級駕駛輔助系統)及無人駕駛場景中,主掛車間夾角是列車轉向、泊車工況下的行為預測、安全報警等功能開發算法的重要輸入參數。 因此,對汽車列車主掛車夾角測量方法的研究具有重要意義。
1 基本測量方法
汽車列車根據基本結構形式可分為牽引桿掛車列車、鉸接列車、中置軸掛車列車等[1],如圖1 所示。
近年來隨著傳感、雷達、導航等技術的發展,汽車列車主掛車夾角的測量方法日益豐富并逐漸成熟, 且已投入到車輛的實際生產應用之中。 根據車輛實際情況及測量原理,目前常用的主掛車夾角測量方法有轉角傳感器測量法、位置傳感器測量法、激光雷達測量法、 主掛車GPS(Global Positioning System, 全 球 定 位 系統)定位測量法、旋轉編碼器測量法等等。
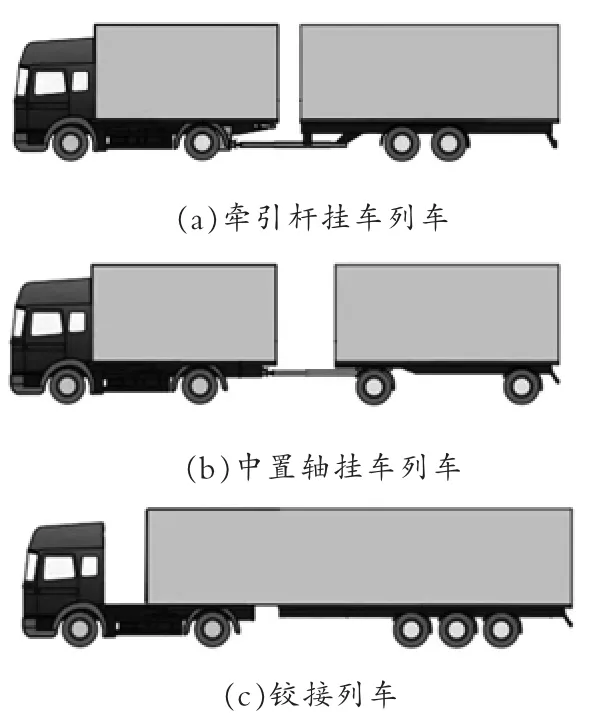
圖1 常用汽車列車的基本類型
1.1 轉角傳感器測量法
轉角傳感器有磁電式、光電耦合式等多種形式,測量汽車列車主掛車夾角時,將轉角傳感器安裝于牽引掛鉤與掛車牽引銷組成的連接副之間。 圖2 所示為磁電式轉角傳感器的組成及結構, 大齒輪A 與兩個齒數不相等的從動小齒輪B 和小齒輪C 嚙合;大齒輪A 隨掛車牽引銷一起轉動, 兩個小齒輪軸與傳感器外殼一起固定在主車牽引掛鉤上, 每個小齒輪上各設置有水平充磁的永磁體, 兩塊永磁體上方分別放置固定不動的磁阻角度傳感器; 永磁體隨齒輪轉動, 通過微處理單元可采集兩個小齒輪的轉角。 當主掛車相對轉動時, 牽引銷同軸固定的大齒輪帶動兩個小齒輪轉動, 由于兩個小齒輪齒數不同,牽引銷轉動在不同的位置,兩個小齒輪會相差特定的角度。 由于大齒輪轉動角度與兩個小齒輪轉動角度差之間有特定的對應關系,依據三者角度關系,可由微處理單元計算得到牽引銷的轉角[2]。
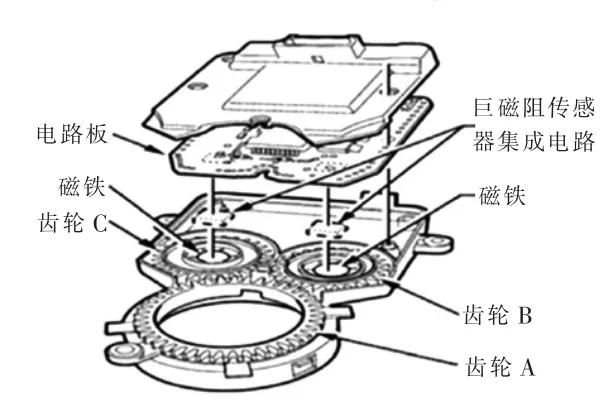
圖2 磁電式轉角傳感器組成及結構
1.2 位置傳感器測量法
位置傳感器測量法是一種間接測量主掛車夾角的方法,利用安裝于主車的位置傳感器測得其距掛車的距離,該距離與主掛車間夾角呈一定函數關系, 根據此關系即可將直接測得的主掛車間的距離信息轉化為夾角信息。
一種利用位置傳感器測量主掛車夾角裝置的安裝方式及測量方法[3]如下:將位置傳感器安裝在主車車架上,用以探測其距掛車底部某特殊結構桁架的距離, 該桁架由兩段螺旋形筋條拼接組成,主車和掛車未形成夾角時,位置傳感器的測量探頭垂直正對桁架的最下端。 其結構如圖3 所示。
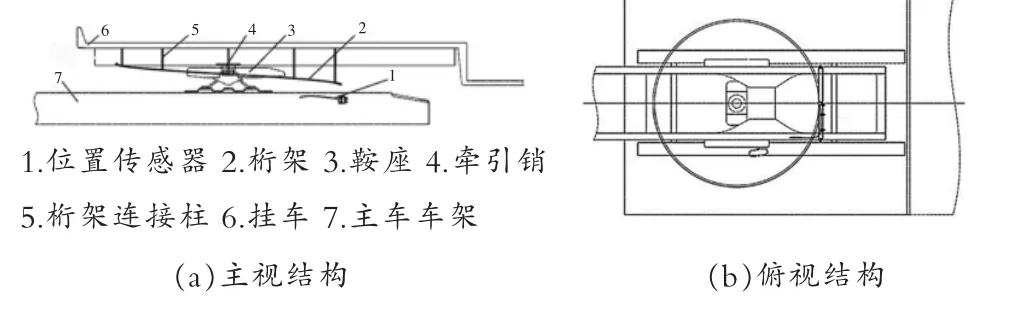
圖3 一種位置傳感器測量主掛車夾角的安裝實例
當掛車相對主車轉動時, 位置傳感器實時測量其與桁架之間的垂直距離變化量,根據螺旋運動原理,有下述轉換關系式:

式中:dh—掛車相對于主車轉動時,位置傳感器測得的其與桁架間的垂直距離變化微元;dθ—掛車相對于主車的轉動角度變化微元;t—桁架的螺旋形筋條所在螺旋形結構的螺距。
掛車與主車的夾角初始值為零時對應位置測量傳感器與桁架間的最小垂直距離, 這由兩者的相對安裝位置決定。再結合上式,即可由位置傳感器測得的其與桁架間的垂直距離得到主掛車間的夾角。
1.3 激光雷達測量法
激光雷達廣泛應用于環境監測、交通通訊、資源勘探、生產制造等眾多領域,實現測距、測速、監控、報警等諸多功能。根據激光雷達的測距原理,可以得到雷達到目標點的距離,脈沖激光不斷地掃描目標物,就可得到目標物上全部目標點的數據,即激光點云。利用激光雷達測量汽車列車主掛車夾角時,激光雷達安裝于主車后方,掃描掛車得到激光點云數據,再對點云數據進行處理[4]并通過霍夫變換可檢測掛車邊緣角度,最終計算出主掛車夾角。利用激光雷達測量主掛車夾角示意圖及數據處理流程如圖4、圖5 所示。
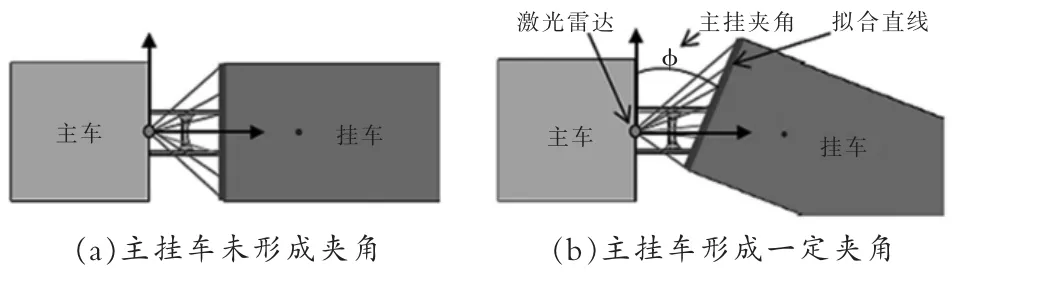
圖4 利用激光雷達測量主掛車夾角示意圖

圖5 激光雷達點云數據處理流程
1.4 主掛車GPS 定位測量法
GPS 自問世以來,就以高精度、全天候、方便靈活等優點而得到廣泛應用,在汽車市場、物流行業更是有著舉足輕重的作用,它能夠為車輛提供準確的地理位置、車行速度及精確的時間信息。 接收裝置采集到的GPS 信號經數據變換處理可得到車輛的定位坐標、 航向角等車輛位姿信息, 利用GPS 的該應用可以進行汽車列車主掛車夾角的測量, 即在主車和掛車上分別安裝GPS 信號接收裝置, 分別得到主車和掛車的航向角, 兩者之差即主掛車間的夾角,如圖6 所示。
圖中,θz、θg分別為GPS 信號經數據處理后得到的主車、 掛車航向角;φ—主掛車間夾角,則有:

1.5 旋轉編碼器測量法
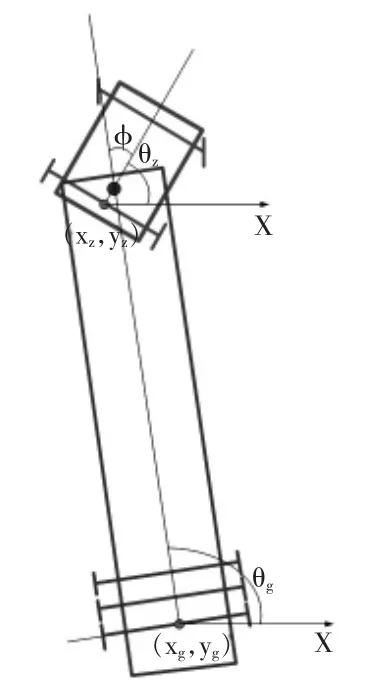
圖6 通過主掛車GPS 定位測量主掛車夾角示意圖
中國發明專利ZL20191015482 0.9 公開了一種基于旋轉編碼器測量計算主車和掛車夾角的裝置及方法[5],如圖7 所示。
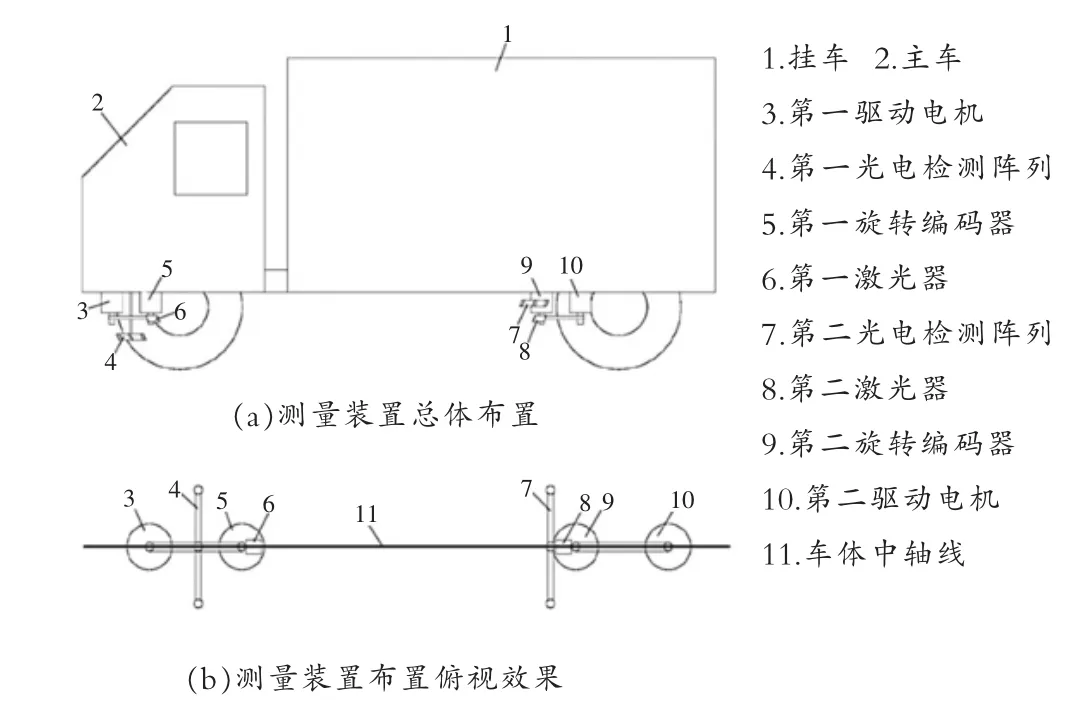
圖7 基于旋轉編碼器測量主掛車夾角的裝置
分別在主車和掛車上安裝第一旋轉編碼器、 第二旋轉編碼器,其與旋轉軸中心構成線性映射關系,在掛車相對主車發生角度變化時, 控制模塊通過接收光電檢測陣列的輸出電平控制驅動電機進行相應轉動, 在使第一旋轉編碼器、第二旋轉編碼器始終實現互相追蹤的情況下,高頻率、高精度地實時獲得兩旋轉編碼器的當前角度,進而結合偏差常量計算得到主車和掛車之間的夾角。
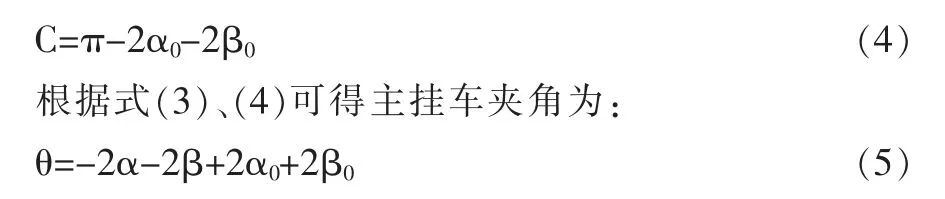
根據該專利所述的測量方法,有如下關系式:

式中:α、β 分別為第一旋轉編碼器、第二旋轉編碼器的當前角度讀數;θ—主掛車夾角;C—偏差常量。
當主掛車呈直線狀態,即主掛車夾角θ 為0 時,讀取第一旋轉編碼器、第二旋轉編碼器讀數α0、β0,可得偏差常量:
2 各種測量方法的特點及應用分析
上述汽車列車主掛車夾角的測量方法具有各自的優點及局限性,下面對其優缺點及應用進行分析。
轉角傳感器測量精度高,產品應用成熟,用于主掛車夾角測量時車型適用范圍廣。但由于安裝位置的因素,容易受到油污、泥垢污染;且易受到主掛車在連接副間的沖擊而損壞;此外,由于傳感器本身結構及測量原理特點,不利于列車的上掛、脫掛等操作,因此轉角傳感器在主掛車夾角測量的應用上受到了很大制約。
上述利用位置傳感器測量主掛車夾角的裝置及測量方式只適合于鉸接列車主掛車夾角的測量, 且在掛車改制方面具有一定難度,在車型選用上具有一定的局限性。但其測量精度高,受列車運行環境因素影響小,且該測量方式采用了斷開式的探測、感應原理,而非機械連接式的接觸作用,從而避免了列車上掛、卸掛過程中帶來的操作不便問題,為汽車列車主掛車夾角測量提供了一種思路。
利用激光雷達測量主掛車夾角的方法, 一線激光雷達即可滿足測量需求,經濟性適中,車輛改制簡單,安裝方便,車型適用范圍廣。但利用激光雷達測量主掛車夾角時需要得到掛車邊緣點云數據, 這就要求掛車邊緣擁有足夠的平面度,特殊情況下需對其進行專門改制;此外,激光雷達性能受天氣影響較大,在大雨、煙霧等天氣環境下,衰減嚴重,對測量精度有較大影響。綜合測量精度、成本、適用性等因素,在良好的外部環境下,利用激光雷達測量主掛車夾角是一種很好的選擇方案。
利用GPS 測量主掛車夾角技術成熟可靠, 不受車型限制,安裝方法靈活;但測量時需要兩套GPS 系統,設計成本高,且掛車部分GPS 布置和接線具有一定困難。
利用旋轉編碼器測量主掛車夾角的方法, 測量精度高、抗干擾能力強、車型適用范圍廣;但裝置復雜、設計成本高,不利于產品化,在高測量精度需求的試驗階段是個優選的測量方法。
3 結束語
汽車列車主掛車夾角作為列車轉向、 泊車及智能駕駛場景諸多功能開發的重要輸入參數, 對其測量方法的研究日益廣泛和深入。本文從結構、原理等方面對主掛車夾角的多種測量方法進行了研究和分析,為實際應用中汽車列車主掛車夾角測量方案的選取提供了參考和依據。除上述介紹的方法之外, 還有利用掛接輔助系統測量主掛車夾角、利用高能相機特征圖案法測量主掛車夾角[6]等方法,在這里不再詳細介紹。 實際測量時,綜合考慮設計需求及各種測量方法的適用性、測量精度、成本、安裝等因素進行選擇,以達到既滿足使用要求,又易于實現且成本低廉的目的。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
