一種無人機地面綜合檢測設備模擬訓練系統的研制
2021-04-19 06:40:24趙育良黎志強
宇航計測技術 2021年6期
趙育良 黎志強 黃 詰
(海軍航空大學青島校區,青島266041)
1 引言
作為無人機系統不可或缺的組成部分,無人機地面檢測設備(后簡稱地檢設備)主要用以在地面實施對無人機及機載設備的狀態檢測,為無人機的放飛提供必要的依據。所研究的這種無人機地檢設備主要由二次電源、綜合計算機及控制面板組成,整個操作過程包括交流電的供電、直流電源箱啟動、檢測臺供電、綜合計算機供電啟動及電源輸出控制、機載設備檢測等,在檢測過程中地勤人員還要協同觀察飛機舵面等部件的相應動作,整個檢測過程操作復雜煩瑣,要求嚴格。而這種無人機系統一般四套飛機只有一臺地面檢測設備,如果單純依靠實裝訓練,不可避免會損害裝備影響其使用壽命,訓練費效比高,訓練時常被迫降低訓練難度,簡化訓練程序,影響訓練效果。基于此,研制一套模擬仿真訓練系統,為受訓者提供一個極為逼真的訓練環境,使受訓者最大限度地得到接近現實場景的訓練,顯得尤為重要。當前,針對不同的應用場景,國內外有Virtools、VegaPrime、Quest3D、Unity3D、EON 等多種三維仿真開發平臺,這些不同的平臺在各自不同的領域有著各自的優勢,但也不同程度存在短板。如Virtools 對CAD 模型支持和管理不夠,VegaPrime 多用于視景開發但交互性差,Quest3D 兼容整合性差。相對而言,EON 對于機載及地面設備模擬通電及拆裝訓練則有著獨特的優勢,雖然其視景效果有限,但其在面片的管理、軟件兼容性等方面優勢明顯,且提供EonX 標準插件供高級語言平臺調用,具有較好的二次開發能力和交互性,是公認的整合性、延展性較好的虛擬現實開發平臺之一。基于此,本項目以C#為平臺,基于EON 和LabWindows/CVI 研制了一套基于桌面的地檢設備的模擬仿真訓練系統,該系統采用分布計算的C/S 體系結構,利用UDP 協議進行通訊,實現各客戶端的協同控制,可同時供多用戶單獨或協同訓練。
2 系統總體設計[1~6]
整個模擬仿真訓練系統以C#為平臺,采用分布計算的C/S 體系結構設計實現,系統將人機交互、數據解析及邏輯解算分別在不同的進程中在服務器端進行計算,這樣可保證人機交互的實時性與系統邏輯的可靠和一致性。用戶通過客戶端程序實現人機交互,并將操作內容以預置變量的形式實時發送至服務器,服務器則通過預置邏輯對動作解算響應利用UDP 協議與客戶端進行通訊,通過SOCKET 接收服務器端數據,通過數據解析獲得當前無人機及地檢設備各子系統組件的工作狀態,并利用數據驅動客戶端相應面板及操作界面顯示相應狀態。根據分布式原則,只要網內有客戶端接入服務器,即可隨時加入該組,實時動態操作并顯示動態畫面。對于機場、無人機及地面檢測設備,為了便于管理及交互設計實現,系統選用3dsMax 建立仿真對象的物理模型,通過EON Studio 實現三維視景下的交互操作及狀態顯示,而對于綜合計算機檢測畫面,為了與原設備完全一致,系統則通過LabWindows/CVI 設計實現,針對本客戶端軟件的完整性,系統將該模擬封裝成一個動態鏈接庫進行調用,并通過C#平臺進行數據中轉,實現服務器與客戶端、三維場景與動態鏈接庫之間的數據交互。為了更好地適應無人機保障維護人員的實際訓練需求,這種無人機地檢模擬仿真訓練系統還設置了資料檢查、外部檢查、仿真拆裝、仿真通電及系統管理等功能模塊,本文重點論述仿真通電的技術實現,系統總體框圖如圖1所示。
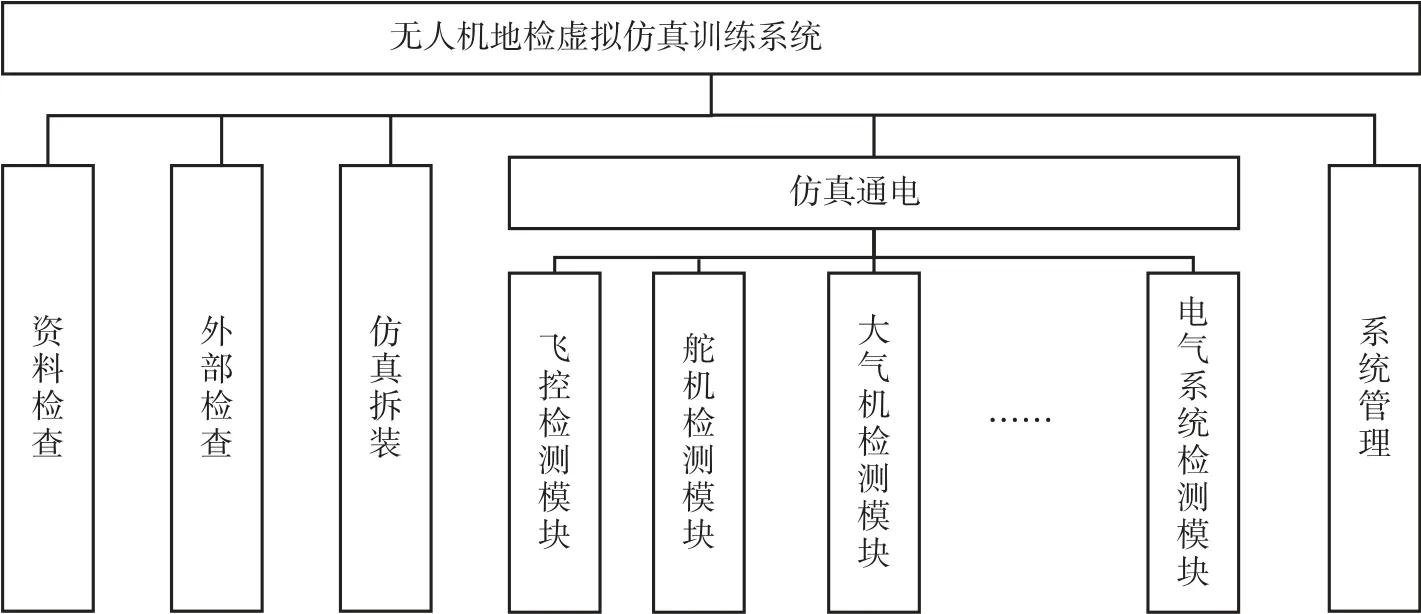
圖1 系統總體組成框圖Fig.1 System overall composition diagram
3 系統技術實現
如上所述,本系統是以C#為開發平臺結合EON和LabWindows/CVI 實現的。其突出特點主要有三點:一是針對機載及地面設備保障訓練需求,基于COM 標準組件和動態鏈接庫的二次開發思想,構建了一套人機交互強的模擬訓練平臺;二是為了實現動態圖形化界面并提升其易操作性,綜合運用COM 組件和Windows 消息攔截技術,利用ShockWave 控件在C#中調用flash 導航程序,制作軟件導航系統;三是為了提升地檢設備操作畫面的逼真度,系統采用與原裝備完全一致的LabWindows/CVI 實現復雜的檢測操作面板二維仿真畫面開發,封裝成標準動態鏈接庫后供C#平臺調用。具體技術實現如下:
3.1 建立仿真模型
根據本系統的功能設計需求,系統模型主要包括無人機(含可活動舵面、副翼)、地面檢測車(含車內必要配套設備)、檢測臺、機場及機庫等。由于3ds Max 具有強大的建模和貼圖功能,而且EON Studio 還專門提供了專用插件,不僅能將模型直接導出標準EON 格式,且能較好的保留貼圖及預設動畫信息,因此本系統采用3ds Max 作為建模工具。與日常見到的效果圖及動畫制作相區別,由于需要對仿真模型在仿真環境下進行實時渲染,因此對模型有更高的要求,既要有逼真的外形,又到做到盡可能少的面片數。
在建模及模型優化的過程中要關注以下幾個方面:一是在不影響外形的情況下用盡量少的面片數。在建模過程中盡量少用布爾運算、放樣等操作,盡量通過點、線、面的拉伸、擠出等操作構建復雜模型,且注意區分視景中的主體及非主體模型,在視景中看不到的面片盡量刪除,不影響顯示效果盡量少分段,確保用最少的面片展現最優的模型。另外EON 為了優化貼圖調入效率,要求將其集中置于2×2的一張圖上。二是在模型制作前就要規劃分組并合理命名,這樣通過插件轉換后會帶入EON 文件,便于后續的模型管理及調用。三是為了提升用戶體驗,保證系統的場景和操作的逼真性,構建的可視化物理模型必須做到與仿真對象高度一致,做到照片級的質量,而且盡可能優化,以增加交互實時性。
3.2 仿真實現
根據設計要求,仿真通電系統在形象直觀地將裝備各個部分的3D 模型、通電操作、通電現象展現給受訓者同時,還需具備指導訓練、記錄訓練過程、訓練過程監控、訓練考核與管理等功能。為了實現上述功能,在軟件的開發過程中,需要完成用于用戶、訓練過程及相關技術數據管理的數據庫設計,根據三維交互仿真需求,完成機場環境、飛機及其部件以及測試設備等仿真對象3D 制作,在此基礎上,在EON Studio環境下進行行為邏輯模型編寫,而復雜的檢測操作面板二維仿真畫面則利用LabWindows/CVI 開發實現,封裝成標準動態鏈接庫后供C#平臺調用,最終在C#平臺下,對二三維的仿真模塊進行二次開發,實現其信息交互與響應,依據訓練大綱,完成仿真程序開發。其仿真實現過程如圖2所示。
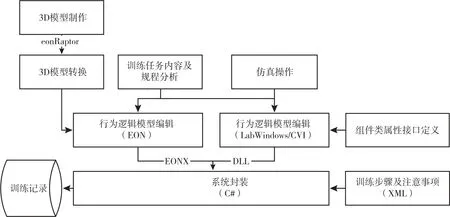
圖2 系統仿真實現過程Fig.2 System simulation process
3.2.1 三維仿真環境實現
如上所述,本系統是利用3DMax 完成仿真對象三維物理模型制作的,通過EonRaptor 插件將模型導出成EON 標準格式(*.eoz)。為了適用Win7 操作平臺,系統采用EON7.0 進行開發。在EON 平臺下,打開導出的模型后,會將模型分組、預設動作等帶入,并自動生成視景漫游控制程序,用戶可調整漫游方式,并根據實際需要對三維視景的參數進行調整。在此基礎上,根據預先編制的仿真邏輯腳本,利用EON 提供的豐富的節點,按照無人機地檢流程,實現與實際訓練操作規程一致的交互操作,并按照設備工作原理同步顯示相關通電現象(指示燈及舵面偏轉等)。對于一些簡單的操作邏輯可通過Place、Latch、ClickSensor、TimeSensor、Rotate 等節點實現,而對于復雜動作或操作邏輯,則需通過系統提供的Script 節點,采用JavaScript 腳本語言實現,用戶可根據實際需要自定義輸入輸出接口,并編寫響應函數,實現與封裝節點的交互響應。EON 軟件利用其傳感器節點(如ClickSensor)感知接收用戶利用鼠標或鍵盤完成的操作,然后將對應的事件消息(如LeftButtonDown)通過內部路由傳送至相應的功能節點(如Place)或Script 節點等,實現對消息的響應或處理,驅動模型按照相應的邏輯動作或改變屬性,并通過顯示、音頻等輸出設備將結果反饋給用戶,從而達到三維仿真環境下交互操作的目的。這一過程的基本原理如圖3所示。為了便于操作者在三維視景下漫游操作,系統加入EON 提供的WalkAbout 節點,并通過該節點的相關屬性依據用戶的操作習慣設置漫游操控的鼠標及鍵盤、漫游速度、旋轉速率、視角方向等。同時系統還利用CollisionObject 節點實現對于仿真環境的碰撞檢測,加強用戶的體驗感。圖4 是本軟件EON 環境下三維仿真實現傳輸邏輯圖,這是整個系統開發的核心,直接關系到與應用程序的仿真流程及接口通信邏輯。
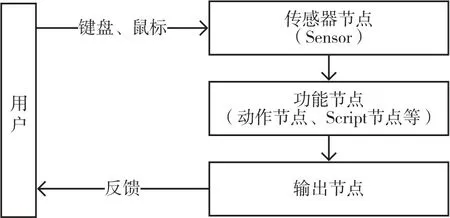
圖3 EON 基本邏輯原理圖Fig.3 EON basic logic diagram

圖4 EON 節點傳輸邏輯圖Fig.4 EON node transmission logic diagram
3.2.2 二維仿真動態畫面實現
由于這種無人機的地面綜合檢測設備的動態檢測畫面是利用LabWindows/CVI 開發的,因此為了體現仿真訓練系統的逼真度,給訓練者更加真實的體驗,本系統的地檢二維仿真畫面亦是通過該軟件開發實現的,整個仿真界面利用LabWindows/CVI提供的標準控件搭建,其數據顯示與操作交互完全與原設備一致,如圖5所示。考慮到動態鏈接庫具有很好的可移植性和通用性,系統將仿真程序以動態鏈接庫(Dynamic Link Library,DLL)的形式封裝為一種通用的基于Windows 的程序模塊,方便在第三平臺的調用與數據交互,滿足信息交互的需求,系統還自定義了InitForm 和DataTrans 兩個接口函數。LabWindows/CVI 封裝動態鏈接庫文件的操作如下:一是將源程序中的主函數Main 用DllMain 替代,方法是利用功能菜單【Edit】 | 【Insert Construct】 |【DLLMain】實現;二是利用功能菜單【Build】 |【Target Type】 |【Dynamic Link Library】打包DLL 文件。

圖5 綜合檢測軟件仿真界面Fig.5 Comprehensive detection software simulation interface
3.3 客戶端仿真環境集成[16]
由于客戶端程序最終以C#為平臺進行開發,因此,需要通過調用COM 組件或動態鏈接庫的形式對上述子仿真程序進行封裝,并按預置的仿真邏輯設置相關通訊接口的信息交互屬性及響應函數。
對于三維仿真模塊,當基于EON 環境的通電仿真邏輯完成后,可保存為標準的eoz 格式,但為了保護文件的安全,可將其發布成*.edz 格式文件,利用標準COM 組件實現在C#中的調用,利用預設接口,通過預先封裝的事件響應方法,對EON 的二次開發實現信息的交互與響應。要實現這一步必須借助EonX 控件,EonX 是EON 提供給二次開發平臺(即C#)的通信接口,通過它可以把預先完成的行為模型顯示在C#平臺中,進行正常瀏覽。需要注意的是對于64 位Win7 以上平臺下,必須使用EonX7.0 及以上控件才能支撐。控件通過EON 內部的路由輸入接口接受C#平臺的發送的輸入消息,實現對外來指令的響應,同時,EON 亦可利用輸出接口向C#平臺輸出消息,完成這一交互過程是通過EONX 中封裝的事件響應接口——InEvent 和OutEvent 實現的。
而對于LabWindows/CVI 動態鏈接庫,需要采用以下方式進行調用,并設置接口函數入口并聲明要使用的函數。
[DllImport("SimFormDll.dll",EntryPoint = "InitForm")]
static extern int InitForm();//面板調入函數
static extern void DataTrans(ushort[]inputdata,ushort[]outputdata);//數據通信接口函數
如圖6所示。
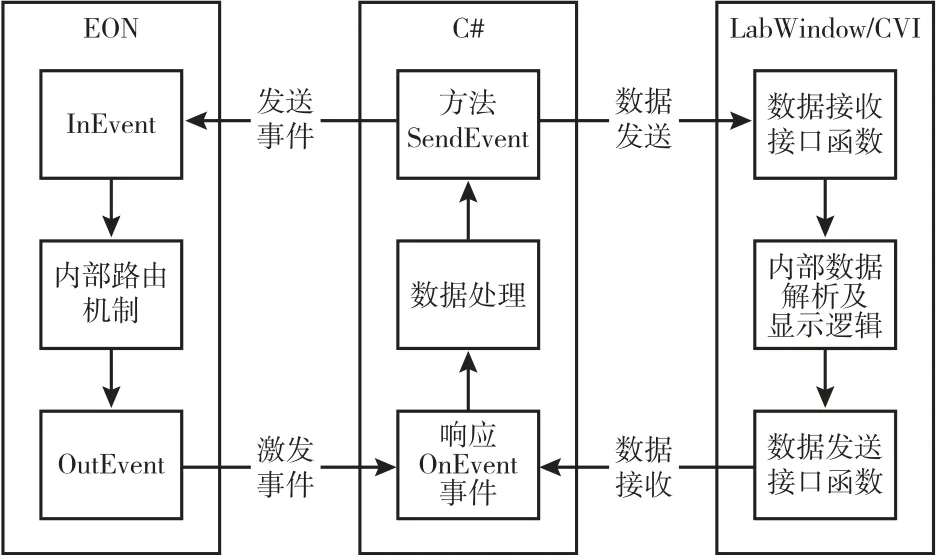
圖6 EON、動態庫與C#的接口關系Fig.6 Interface relationship between EON,dynamic library and C#
4 系統集成及測試
4.1 系統構建及交互界面設計
用戶交互界面與導航對于用戶的使用體驗非常重要,一個好的人機交互界面往往能夠提高用戶的操作和訓練效果,尤其對于基層部隊用戶,這一點顯得尤為重要。因此考慮到界面的美觀和易操作性,軟件采用flash 制作軟件導航系統,利用ShockWave 控件在C#中調用,在此基礎上整合上述第三方插件,綜合實現系統構建。為了避免Flash右鍵菜單對用戶帶來的困擾,系統還通過截獲鼠標右鍵響應消息的方式,將其屏蔽。為了能更好的服務于一種無人機裝備保障訓練,系統還設置了資料檢查、外部檢查、仿真拆裝及系統管理等功能模塊,系統導航界面和仿真三維仿真環境效果如圖7所示。

圖7 系統導航界面和仿真三維仿真環境Fig.7 System navigation interface and simulation 3D simulation environment
4.2 系統測試
按照系統方案的技術指標要求及相關測試大綱,對系統進行了測試。通過導航界面進入一種無人機通電檢查的仿真環境,并可利用快捷鍵在環境中進行漫游,觀察機場、飛機及相關車輛和測試設備。經測試,系統可根據預設的邏輯,利用鍵盤、鼠標等輸入設備在虛擬環境下依據相關規程要求進行規范的檢測操作,并利用特定視窗觀察相關動作和現象,整個任務覆蓋率達到90%以上。系統各級導航界面友好,操作程序、方法及相關邏輯準確,二三維仿真環境的響應與顯示實時正確;系統響應時間達到預設要求,能夠滿足用戶視覺需要,無停頓感和交互延遲感;系統穩定可靠,48 個小時以上的連續運行測試未發現異常現象;系統操作簡便,鍵盤和鼠標鍵的功能定義合理,符合用戶的常規操作習慣;系統仿真環境逼真,各子系統之間的通信響應正常,能夠完成一種無人機地檢全流程仿真操作,符合設計要求。
5 結束語
本文針對一種無人機訓練手段缺乏的問題,提出并實現了無人機地檢模擬仿真訓練系統研制,重點論述了系統總體構成及仿真通電檢查模塊的設計與實現。系統以C#為主平臺,對EON 和LabWindows/CVI 仿真程序模塊進行二次開發,實現了通用仿真平臺設計及一種無人機地檢設備的仿真邏輯,能夠按照設計要求實現基于維護規程的全流程仿真操作,該系統的研制,較好的解決了相關設備訓練手段缺乏的難題,為裝備能力的提升提供了重要支撐。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中等數學(2022年2期)2022-06-05 07:10:50
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
電子制作(2018年11期)2018-08-04 03:26:08
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
工業設計(2016年12期)2016-04-16 02:52:00
